Изобретение относится к моторизованному устройству поворота груза с автоматическим питанием энергией, предназначенному для подъемных механизмов с тросом, таких как башенные краны, передвижные краны, мостовые краны, козловые краны и т.д. Это устройство обеспечивает угловую установку грузов, удерживаемых такими подъемными механизмами. Для таких механизмов известно применение крюков, устанавливаемых вращающимися на полиспастах с несколькими жилами при помощи вертлюжных крюков, т.е. упорных шарикоподшипников. Наиболее часто вращение крюка с грузом или без груза осуществляется вручную при приближении к месту установки или укладки груза. Несмотря на наличие защитных устройств и предусмотренные меры безопасности, эти операции всегда представляют риск для оператора или из-за того, что он касается руками подвижных элементов, или просто из-за его присутствия вблизи груза.
Известно устройство, в котором вращение крюка или в более общем случае захват груза электрически моторизован и управляется дистанционно с моста управления, расположенного на подъемном механизме. В случае башенных кранов со стрелой, например с тележкой и подъемным тросом, образующих полиспаст, имеются полиспасты с мотором-редуктором, телеуправляемые для приведения во вращение поворотного крюка. В этом случае электрический кабель питания и дистанционного управления двигателя поворотного крюка проходит через перематыватель, расположенный на тележке перемещения груза. Этот кабель наматывается и разматывается на барабане перематывателя от положения тележки на стреле и от высоты под крюком [1]
При таких реализациях возникают две трудности: удержание достаточного механического натяжения кабеля питания и дистанционного управления и защита от риска перерезания или повреждения кабеля в случае закручивания подъемного троса.
Известно устройство, в котором проблемы с кабелем питания и дистанционного управления могут быть решены путем питания электродвигателя поворота крюка от батареи, установленной на корпус полиспаста, и осуществления дистанционного управления при помощи радиоуправления [2]
Однако это требует часто подзаряжать батарею, в частности каждую ночь.
Для исключения перезарядки батареи предложено моторизованное устройство поворота крюка, которое автоматически питается энергией, т.е. само обеспечивает создание, накопление, восстановление и возобновление энергии, необходимой для его функционирования, за счет использования перемещения подъемного троса относительно шкива устройства. Это происходит во время перемещения грузов, в частности, при их подъеме или опускании. Предлагаются механическая передача от по меньшей мере одного шкива к гидравлической помпе и гидравлическая цепь с аккумулятором, которая позволяет запитывать гидравлический двигатель привода поворота груза [3]
Однако такое решение является дорогим и оправдано только для применения к механизмам подъема очень тяжелых грузов, например для портовых кранов для контейнеров. Такое устройство имеет также другие недостатки: его автономность, связанная с емкостью гидравлического аккумулятора, ограничена; его общая масса большая, если учесть весь комплект необходимых механических и гидравлических средств, и это уменьшает полезный вес, поднимаемый подъемным механизмом; гидравлические средства поворота груза должны обязательно электрически управляться и контролироваться; необходим отдельный источник питания для приемника сигналов дистанционного управления.
Изобретение лишено этих недостатков и представляет собой моторизованное устройство для поворота груза в подъемных механизмах с тросом, с автоматическим питанием электрической энергией таким образом, что производимая электрическая энергия обеспечивает одновременно запитывание средств моторизации поворота груза и средств для приема сигналов дистанционного управления. Предлагаемое устройство обладает существенной автономией при относительно ограниченной массе.
Устройство в соответствии с изобретением имеет корпус полиспаста с несколькими ручьями и несколькими шкивами, через которые проходит по меньшей мере один трос подъема, подвеска, вращающаяся вокруг строго вертикальной оси, соединенная с корпусом полиспаста и предназначенная для закрепления крюка или любого другого захвата для транспортировки груза, средство моторизации для поворота подвески вокруг указанной оси, вращающийся генератор энергии, приводимый в движение от одного шкива в корпусе полиспаста, через который проходит трос подъема, и средства накопления энергии, которые заряжаются от генератора и дают энергию, необходимую для моторизации поворота подвески, в корпусе полиспаста имеются также встроенные средства для приема сигналов управления и для контроля генератора питания. Это устройство отличается тем, что генератор энергии питания средств моторизации поворота подвески представляет собой генератор электрического тока, ротор которого механически приводится во вращение от одного или нескольких шкивов корпуса полиспаста, тем, что средствами накопления энергии являются средства накопления электрической энергии, тем, что моторизация приведения во вращение подвески представляет собой электрическую моторизацию, и тем, что одни и те же средства накопления энергии обеспечивают питание средств приема сигналов управления и контроля генератора электрического тока и питание средств электрической моторизации.
Таким образом, в соответствии с изобретением имеется моторизованное устройство поворота груза, полностью автономное и полностью электрическое.
Устройство в соответствии с изобретением в основном обеспечивает электрическую энергию для питания средства моторизации поворота подвески, а следовательно, и груза, а также позволяет питать дополнительные устройства, например, для автоматического захвата груза, для поиска центра тяжести и т. д. от любого кабеля электрического питания, входящего в корпус полиспаста.
В соответствии с предпочтительной формой реализации изобретения закрепленный на корпусе полиспаста генератор электроэнергии является генератором переменного тока со встроенным выпрямительным мостом и регулятором, ротор генератора приводится во вращение от шкива в корпусе полиспаста, у которого наибольшая скорость вращения. Этот генератор переменного тока подключается по меньшей мере к одному аккумулятору, представляющему средства накопления электрической энергии, а средство моторизации представляет собой электродвигатель постоянного тока, который приводит во вращение подвеску через редуктор скоростей, причем питание электродвигателя от одного или нескольких аккумуляторов контролируется электрическим и электронным комплектом управления, встроенным в корпус полиспаста.
Предпочтительно приведение во вращение ротора генератора от шкива в корпусе полиспаста с наибольшей скоростью обеспечивается через посредство мультипликатора скорости, предпочтительно, планетарного типа. Таким образом, при минимальных габаритах получают вращение генератора переменного тока при высокой скорости, оптимальной для генератора электроэнергии.
В соответствии с особой формой реализации электродвигатель постоянного тока обеспечивает вращение подвески через посредство шестеренчатого редуктора скоростей, первая ступень которого представляет собой планетарный редуктор, а вторая редуктор с цилиндрической зубчатой передачей.
В соответствии с дополнительной характеристикой устройство имеет датчик относительной позиции, например абсолютный или шаговый преобразователь, который контролирует угловое положение вращающейся подвески относительно корпуса полиспаста, а также гирометр, который контролирует абсолютное положение вращающейся подвески. В случае датчика относительного положения в виде вращающегося преобразователя этот преобразователь может приводиться во вращение шестерней, которая зацепляется с зубчатым колесом последней ступени цилиндрических шестерен указанного редуктора. Это зубчатое колесо закреплено на шпонке на вращающейся подвеска.
Сама вращающаяся подвеска имеет в соответствии с другой характеристикой верхнюю цилиндрическую часть, закрепленную на упорном подшипнике внутри корпуса полиспаста, в которой имеется отверстие для прохода электрического кабеля коллектора для подачи накопленной электрической энергии к электрическим узлам захвата и/или других устройств, а также нижнюю часть, наружную по отношению к корпусу полиспаста и служащую опорой захвата.
Таким образом, легко обеспечивается питание электроэнергией различных дополнительных электрических узлов от одного или нескольких аккумуляторов.
Изобретение будет лучше понято из приведенного ниже описания и прилагаемых чертежей, приведенных в качестве неограничивающего примера формы реализации устройства поворота груза, моторизованного с автоматическим питанием энергией, для подъемных механизмов с тросом.
На фиг. 1 показан башенный кран со стрелой, оснащенный предлагаемым устройством; на фиг. 2 то же, вид сбоку; на фиг. 3 вид плоскости сверху устройства, соответствующий виду сбоку; на фиг. 4 предлагаемое устройство с внутренними органами; на фиг. 5 блок-схема функционирования предлагаемого устройства.
Предлагаемое устройство 1 предназначено для оборудования подъемных механизмов с тросом, например башенный кран 2 со стрелой 3. Устройство 1 подвешивается к стреле 3 при помощи подъемного троса 4, образующего полиспаст 5 между распределительной тележкой 6 и устройством 1. Один конец троса 4 закреплен в точке 7 головки стрелы 3, другой конец накручен на барабан лебедки 8, расположенной на опоре стрелы 3. Под устройством 1 располагается вращающийся транспортируемый груз 10.
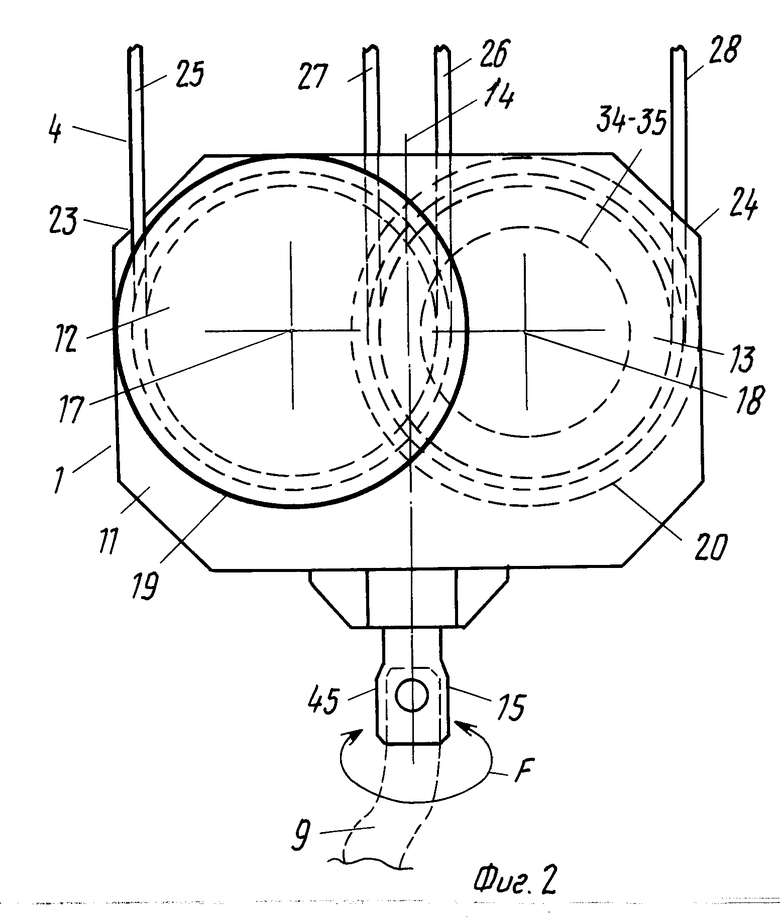
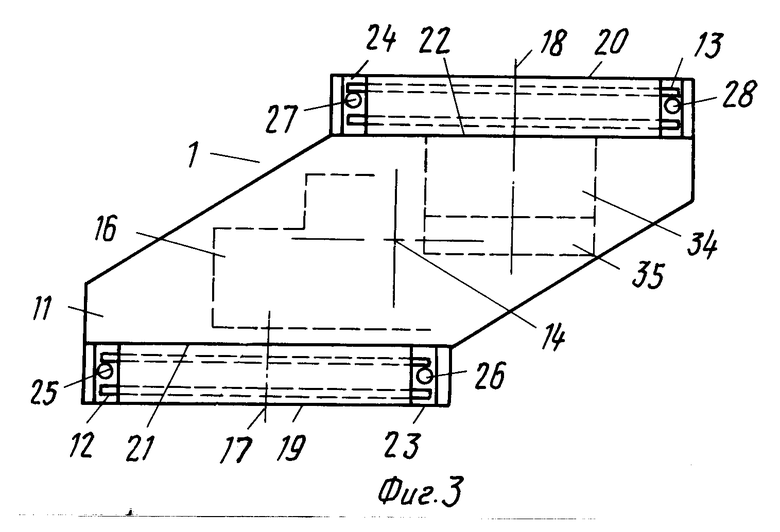
Устройство 1 имеет корпус полиспаста 11 с четырьмя ветвями, с двумя шкивами 12 и 13, которые располагаются симметрично относительно вертикальной оси 14, подвеску 15, установленную вращающейся вокруг оси 14, к которой крепится крюк или захват 9, и средство 16 электрической моторизации для приведения во вращение подвески 15 вокруг оси 14 (как показано стрелкой F).
В корпусе полиспаста 11 имеются оси 17 и 18 горизонтального вращения шкивов 12 и 13, которые защищены картерами из листов 19 и 20, закрепленными на боковых фланцах 21 и 22 указанного корпуса полиспаста 11. В верхней части картеров 19 и 20 имеются отверстия 23 и 24 для пропускания двух жил 25 и 26 троса, выходящих из шкива 12, и двух жил 27 и 28 троса, выходящих из шкива 13.
Средство 16 моторизации представляет собой электродвигатель постоянного тока с постоянными магнитами 29, который работает, например, при напряжении 24 В, редуктор скоростей планетарного типа с одним набором шестерен 30 с точными размерами для передачи крутящего момента с тем, чтобы иметь минимальную инерцию, и редуктор скоростей с цилиндрической зубчатой передачей 31, который приспособлен для приведения во вращение вращающейся подвески 15.
Вследствие того, что имеется полиспаст 5, шкив 13, который располагается со стороны тянущей жилы 28, вращается со скоростью, в два раза большей, чем шкив 12, располагающийся со стороны закрепленной жилы 25. Ступица 32 шкива 13 закреплена на шпонке на входном валу 33 планетарного мультипликатора 34 скоростей, соединенного с генератором переменного тока с встроенным выпрямителем и регулятором 35, который заряжает один или несколько аккумуляторов 36 электроэнергии, которые располагаются в корпусе полиспаста 11.
В устройстве имеется также приемник-передатчик 37 радиоуправления и электрический и электронный комплект 38 управления, все это встроено в корпус полиспаста 11. Вращающийся коллектор 39 позволяет подачу электроэнергии от неподвижной части устройства 1 к электрическим узлам приводимой во вращение части (9, 10 и 15), в том случае, если предусмотрены такие узлы. Датчик 40 относительной позиции, например абсолютный или шаговый преобразователь, контролирует относительное угловое положение подвески 15 по отношению к корпусу полиспаста 11, а гирометр 41 контролирует абсолютное положение вращающейся подвески 15.
Вращающаяся подвеска 15 имеет верхнюю цилиндрическую часть 42, установленную на опорном подшипнике 43 внутри корпуса полиспаста 11, в которой имеется отверстие 44 для прохода выходного электрического кабеля коллектора 39 к электрическим узлам захвата 9 или к другим специальным устройствам, и нижнюю часть 45, внешнюю по отношению к корпусу полиспаста 11 и служащую опорой захвата 9.
Датчик 40 относительной позиции, например преобразователь, приводится во вращение через шестерню 46, которая зацепляется с зубчатым колесом 47, относящемуся к последней ступени цилиндрических шестерен 31, приводящих во вращение подвеску 15, при этом зубчатое колесо 47 закрепляется на шпонке на верхней части 42 подвески 15.
Устройство функционирует следующим образом.
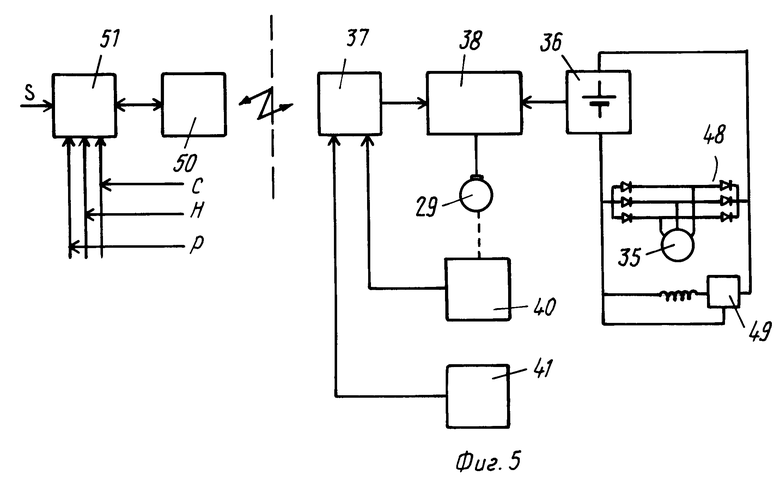
В фазе подъема, при подъеме или опускании корпуса полиспаста 11, шкив 13, скорость которого наибольшая, через планетарный мультипликатор 34 приводит во вращение ротор генератора 35 переменного тока, который наводит в статоре трехфазный переменный ток. Индуцированный ток выпрямляется диодным выпрямительным мостиком 48 и регулируется встроенным регулятором 49, который поддерживает, например 24 В, для заряда одного или нескольких аккумуляторов 36.
Работа генератора переменного тока позволяет обеспечивать зарядку аккумуляторов 36 до величины, достаточной для обеспечения питания всех находящихся на кране узлов, без использования внешних источников. В частности, аккумулятор или аккумуляторы 36 обеспечивают при помощи управляющего комплекса 38 запитывание электродвигателя постоянного тока с постоянными магнитами 29 напряжением от 0 до 24 В, чтобы приводить во вращение подвеску 15 и захват 9 с грузом или без груза, и запитывание от коллектора 39 электрических узлов захвата 9 или других дополнительных устройств.
Передача сигналов управления на устройство 1 осуществляется при помощи радиосвязи между приемником-передатчиком 50 у оператора и установленным на полиспасте приемником-передатчиком 37.
Управляющие сигналы обрабатываются в приемнике-передатчике 51 в зависимости от программируемых или ручных приказов оператора и от информации, поступающей с датчиков, например величина нагрузки С, высота Н груза, угловое положение Р стрелы 3 и т.д. Эти параметры влияют на поворот и угловое положение груза 10.
На расположенный на полиспасте приемник-передатчик 37 поступают также сигналы датчика 40, который задает положение вращающейся подвески 15 по отношению к корпусу полиспаста 11, и сигналы гирометра 41, который показывает положение вращающейся подвески 15 по отношению к последнему положению, зарегистрированному датчиком 40.
Затем управляющие сигналы усиливаются в электрическом и электронном комплексе 38 и подаются на двигатель 29, сила тока и напряжение меняются в зависимости от требуемого крутящего момента и от скорости поворота.
Таким образом, реализовано моторизованное устройство поворота груза, которое автоматически питается энергией, относительное перемещение подъемного троса 4 и устройства 1 обеспечивает за счет генератора 35 переменного тока зарядку аккумулятора 36, который служит резервом энергии для питания средства 16 моторизации вращающейся подвески 15. Движение подъема позволяет устройству создавать и возобновлять его энергию при нормальном применении подъемного механизма. Не только движения подъема или опускания полиспаста, но и движение перемещения тележки 6 вдоль стрелы 3 обеспечивают выработку электроэнергии: даже если перемещение тележки 6 относительно медленное, ему соответствует перемещение подъемного троса 4, которое добавляется к его перемещению при движении подъема-спуска, за счет этого генератор 35 переменного тока вращается быстрее.
Изобретение не ограничивается одной формой реализации этого моторизованного устройства поворота груза с автоматическим питанием энергией, которая была описана выше в качестве примера, оно охватывает все варианты реализации и применения, использующие тот же самый принцип. В частности, не выходят за рамки изобретения: замена генератора 35 переменного тока на любой другой генератор для зарядки, например динамомашину; замена аккумулятора 36 на другое устройство, которое накапливает электрическую энергию; изменения конструктивных особенностей, например, расположение датчика 40 относительной позиции в кинематической схеме привода во вращение подвески 15 или средства приведения во вращение генератора 35 переменного тока от шкива 13; приспособление устройства в соответствии с изобретением к корпусу полиспаста, имеющего иное число ветвей и иное число шкивов; использование этого устройства для других подъемных механизмов с тросом, иных, чем башенные краны со стрелой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЕМЫЙ КРАН | 1990 |
|
RU2035384C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНТАЖА РАСТЯЖЕК ГРУЗОПОДЪЕМНОЙ СТРЕЛЫ БАШЕННОГО ПОДЪЕМНОГО КРАНА | 1997 |
|
RU2200699C2 |
| СПОСОБ МОНТАЖА СТРЕЛЫ БАШЕННОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2145934C1 |
| ПОДЪЕМНЫЙ КРАН | 1996 |
|
RU2169695C2 |
| АВТОМАТИЧЕСКИ СКЛАДЫВАЕМАЯ СТРЕЛА ДЛЯ ПОДЪЕМНОГО КРАНА | 1992 |
|
RU2083473C1 |
| МЕХАНИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА ГРУЗА С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1991 |
|
RU2067965C1 |
| ПОДЪЕМНЫЙ КРАН БАШЕННОГО ТИПА | 1992 |
|
RU2065397C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НАГРУЗОК ДЛЯ ГРУЗОПОДЪЕМНЫХ АГРЕГАТОВ | 2001 |
|
RU2274599C2 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ/КОНТРОЛЯ РАСКЛАДЫВАНИЕМ И СКЛАДЫВАНИЕМ БАШЕННОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2328441C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО МАЧТЫ ДЛЯ БАШЕННОГО КРАНА С ТЕЛЕСКОПИЧЕСКОЙ МАЧТОЙ | 1998 |
|
RU2191156C2 |

Использование: подъемные механизмы с полиспастом. Сущность изобретения: устройство имеет корпус полиспаста 11 с несколькими ветвями 25 - 28 и несколькими шкивами 12 13, по которым проходит трос 4 подъема, которые образуют полиспаст, подвеску 15, установленную вращающейся вокруг вертикальной оси 14 и имеющую крюк 9, и электрическое средство 16 моторизации для приведения подвески 15 во вращение. Шкив 13, через который проходит трос полиспаста, приводит во вращение электрогенератор 35, который заряжает аккумуляторы 36, обеспечивающие энергией средство 16 моторизации. Устройство применимо для башенных кранов и для других подъемных механизмов с тросом. 7 з.п. ф-лы, 5 ил.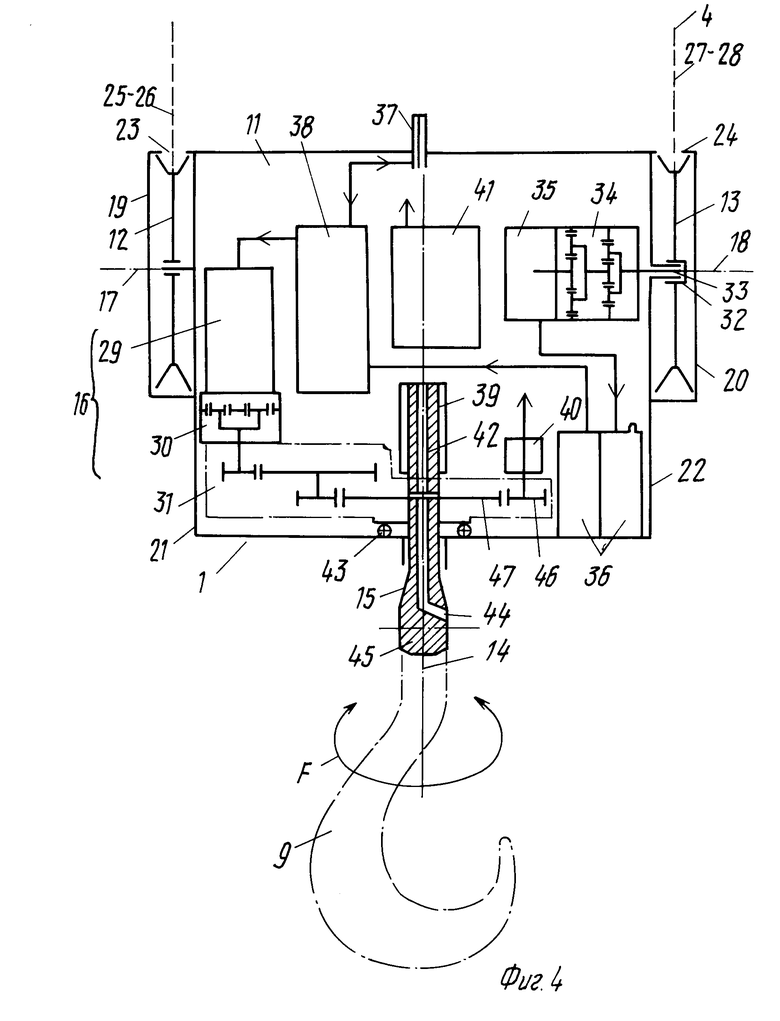
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент Нидерландов N 7614360, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
