Настоящее изобретение относится к способу моделирования нагрузок для грузоподъемных агрегатов, в частности для башенных кранов, с целью регулировки ограничителей грузоподъемности грузоподъемных агрегатов. Это изобретение имеет также своей целью создание устройства для реализации вышеупомянутого способа. Изобретение может быть применено во всех грузоподъемных агрегатах, оборудованных механизмом подъема с лебедкой, у которой электродвигатель управляется вариатором скорости, обеспечивающим регулирование крутящего момента.
Классические способы регулирования ограничителей грузоподъемности грузоподъемного аппарата используют для создания нагрузки реальные эталонные грузы, проводя регулировку следующим образом (применительно к башенным кранам).
Ограничители грузоподъемности предназначены для ограничения усилий, вызванных подвешенным на подъемном крюке грузом и воспринимаемых конструкцией крана, допустимыми значениями, на которые этот кран рассчитан и сконструирован. Обычно предусматривается запас в 10% с тем, чтобы учесть точность систем измерения усилия, а также динамическое увеличение нагрузки, происходящее вследствие ускорений при подъеме.
Порядок операций при регулировке ограничителей грузоподъемности устанавливают таким образом, чтобы обезопасить персонал, который выполняет регулировки, а также оборудование от любых возможных неправильных маневров. Так, регулировку ограничителя грузового момента выполняют до регулировки ограничителей грузоподъемности.
Ограничители грузоподъемности регулируют перед транспортировкой крана, при каждом изменении конфигурации крана и, как правило, минимум один раз в год в качестве периодического контроля.
Классический принцип регулировки, осуществляемый устройством с механическими датчиками, следующий.
Здесь предполагается, в качестве иллюстрирующего примера, что речь идет о регулировке ограничителя максимальной грузоподъемности башенного крана, имеющего допустимую максимальную нагрузку 10 тонн. Эталонный груз весом 10 тонн подвешивают на крюк крана и подводят устройство регулировки ограничителя к пределу прерывания. Затем дают команду подъема этого груза с номинальной предусмотренной скоростью и, если подъем не осуществляется, корректируют регулировку, чтобы сделать его подъем возможным.
Затем груз опускают и добавляют дополнительный 10%-ный груз, т.е. одну тонну в рассматриваемом примере. Проверяют, возможен ли подъем этого увеличенного груза (равного здесь 11 тоннам), и, в противном случае, корректируют регулировку, чтобы вызвать прерывание.
В заключение проверяют, остается ли возможным подъем номинального груза в 10 тонн.
Известны также способы регулировки посредством устройства с электронными датчиками. Такими устройствами осуществляют тарировку при помощи какого либо груза, масса которого находится в пределах нагрузок крана, но не предопределена. Другие нагрузки и грузовой момент, являющийся результатом каждой нагрузки, вычисляются автоматически электронным калькулятором. Несмотря на использование электронных средств этот способ сохраняет неудобство, заключающееся в необходимости иметь, по меньшей мере, один реальный эталонный груз.
Помимо таких классических способов существуют способы, называемые «моделирование нагрузок», позволяющие осуществлять регулировки, не используя реальные эталонные грузы.
Так, в сфере применения башенных кранов уже предложено устройство моделирования нагрузки при помощи мотопомпы и домкрата. Домкрат установлен на уровне механического усилителя имитатора груза, с тем чтобы осуществлять на него воздействие. Нагрузку моделируют при помощи гидравлического давления, создаваемого мотопомпой, и тарировочного графика «давление - нагрузка». Это устройство не позволяет моделировать грузовой момент, соответствующий нагрузке, потому что оно установлено на уровне механических датчиков ограничителей грузоподъемности.
В противоположность этому настоящее изобретение имеет целью избавиться от эталонных грузов при осуществлении регулировок ограничителей грузоподъемности для башенных кранов и, следовательно, сократить операции с такими грузами, а также продолжительность и стоимость этих регулировок, давая возможность также проводить регулировки ограничителей грузового момента.
С этой целью в основном объектом изобретения является способ моделирования нагрузок для грузоподъемных агрегатов, в частности для башенных кранов, заключающийся:
- в установке динамометра между грузовым крюком и точкой закрепления;
- в установке механизма подъема в положение «регулировка» для регулирования грузового момента;
- в сообщении заданного значения, ограничивающего грузовой момент двигателя, управляющего операцией подъема в направлении подъема, при помощи команды вышеупомянутому электродвигателю и считывании значений растягивающего усилия, даваемых подвесным динамометром.
По одному из способов применения подвесной динамометр одним из своих концов присоединен к закрепленной на земле точке или к конструкции крана. В другом варианте применения подвесной динамометр прикреплен одним из своих концов к свободной массе, превышающей по своему значению максимальную нагрузку, подлежащую измерению, таким образом, что эта масса выполняет функции закрепленной точки. Во всех этих случаях другой конец подвесного динамометра закреплен на подъемном крюке крана.
Способ, согласно изобретению, может допускать использование подвесного динамометра с непосредственным считыванием, т.е. динамометр содержит на себе средства индикации растягивающего усилия, которое испытывает динамометр. В этом случае оператор должен находиться около подвесного динамометра для считывания указываемых значений и их передачи другому оператору, проводящему регулировку и находящемуся, как правило, на кране, а именно около электрического щита управления механизмом подъема.
По преимущественному варианту способ, объект изобретения, предполагают использование подвесного динамометра с дистанционным считыванием показаний, т.е. динамометра со средствами передачи на расстояние замеренных значений растягивающих усилий на блок индикации замеренных значений, который преимущественно размещен в непосредственной близости от оператора, проводящего регулировку. Такой вариант, следовательно, не требует присутствия второго оператора для считывания показаний динамометра и исключает ошибки, возможные при общении операторов.
В частности, после установки на место подвесного динамометра с непосредственным считыванием или с дистанционным считыванием и переключением механизма подъема в положение «регулировка», например, по индикации и подтверждению кода доступа на клавиатуре управления вариатором скорости, который управляет мотором, приводящим в действие лебедку подъема груза, процесс регулировки ограничения грузоподъемности при измерении нагрузки состоит:
- в сообщении заданного значения, ограничивающего грузовой момент двигателя, например в форме процентного соотношения от номинального грузового момента, несколько меньшего указанного в таблице расчета нагрузок крана (например: 90%),
- в подаче команды на операцию подъема в направлении подъема до остановки лебедки, при этом подвесной динамометр подвержен действию растягивающего усилия, соответствующего ранее указанному заданному значению, ограничивающему грузовой момент,
- в считывании значения растягивающего усилия, даваемого подвесным динамометром (например, 5,1 тонны),
- в увеличении заданного значения, ограничивающего грузовой момент до получения по показаниям подвесного динамометра скорректированного значения, даваемого таблицей расчета нагрузок (например, 5,2-5,3 тонны),
- в подаче команды на операцию подъема в направлении спуска при превышении желаемого значения и повторении предыдущих операций, корректируя значение, ограничивающее грузовой момент,
- наконец, в освобождении привода таким образом, чтобы тормоз вступил в действие и остановил лебедку в положении, при котором сохраняется прежнее усилие по подвесному динамометру.
Рассматриваемый процесс состоит, кроме того, в том что особо относится к регулировке ограничителя грузоподъемности:
- в увеличении ограничителя грузоподъемности до предела прерывания,
- в подаче команды на операцию подъема в направлении спуска до ослабления подъемного каната,
- в останове крана, ожидая полного прекращения работы вариатора скорости (согласно указаниям технической документации крана это время составляет примерно 30 секунд),
- в повторном пуске крана,
- в подаче команды на операцию подъема в направлении подъема с малой скоростью, при этом ограничитель грузоподъемности остановит движение и тормоз вступит в действие,
- в считывании значения усилия, даваемого подвесным динамометром, и в проверке того, что это значение лежит между номинальным значением нагрузки и вышеупомянутым номинальным значением, увеличенным на некоторое предварительно заданное значение (например, номинальное значение +10%),
операция регулировки считается оконченной, если это последнее условие выполнено, тогда как в противном случае, т.е. если значение силы, определенное подвесным динамометром, меньше или равно номинальному значению или превышает эту номинальную нагрузку, увеличенную, например, на 10%, ранее описанная процедура повторяется с самого начала.
Можно также, исходя из значений измерений, полученных от подвесного динамометра, осуществлять регулировку ограничителя грузоподъемности, задача которого не допускать превышения номинальной нагрузки, на которую рассчитаны и выполнены ферма крана и его подъемная лебедка.
Напомним, что подъемная лебедка крана допускает, как правило, подъем с различными скоростями:
- микроскорость (с максимальной нагрузкой),
- малая скорость (которая является номинальной скоростью с максимальной нагрузкой),
- большая скорость,
- сверхскорость (только при спуске).
Грузы, подвешенные к подъемному крюку, передают растягивающее усилие, пропорциональное грузу, в ветвь подъемного каната в направлении барабана подъемной лебедки. Это усилие передается на блоки, через которые проходит канат или на барабан. Устройство измерения усилия, следовательно, установлено либо на уровне барабана, который образует, таким образом, измерительный барабан, либо на уровне концевого шкива каната, который образует в этом случае измерительный шкив; это измерительное устройство имеет механический усилитель, который управляет ограничителями грузоподъемности.
Для получения максимальной точности регулировок обычно предусматривают различные прерыватели для микроскорости и малой скорости, для учета разных динамических эффектов, хотя допустимые нагрузки остаются теми же для обоих случаев.
Учитывая вышесказанное, регулировки ограничителей грузоподъемности (осуществляемые согласно описанной выше последовательности) выполняются, преимущественно, в следующем порядке:
1. прерыватель сверхскорости,
2. прерыватель большой скорости,
3. прерыватель малой скорости,
4. прерыватель микроскорости.
Кроме того, эти регулировки, преимущественно, выполняются с минимальным вылетом стрелы, т.е. с осью подъемного крюка, расположенной наиболее близко от основания крана, и преимущественно также (в случае сложного блока с изменяемым количеством нитей подъемного каната) с блоком в две нити, для которого усилия, вызываемые ускорениями, более существенны, чем для сложного блока с четырьмя или более нитями.
Полная регулировка включает также регулировку прерывателей ограничителя максимального грузового момента, полезно напомнить, что грузовой момент - это произведение перемещаемого груза (тележка + сложный блок + крюк + полезная нагрузка) на расстояние между исходной точкой постоянного момента, являющееся функцией типа крана, и осью крюка. Регулировка прерывателей ограничителя максимального грузового момента теоретически может проводиться для всех значений нагрузок, лежащих между максимальной нагрузкой и нагрузкой на конце стрелы крана, при максимальном вылете стрелы, соответствующем этой нагрузке, считываемой с таблицы расчета нагрузок. Для выполнения этой регулировки можно использовать способы измерения нагрузки с помощью подвесного динамометра так, как это определено выше.
Для реализации способа моделирования нагрузок, определенного выше, необходимое устройство включает, в основном, подвесной динамометр (с непосредственным или дистанционным считыванием), используемый совместно со средствами регулирования грузового момента и средствами регулирования скорости, встроенными или присоединенные к вариатору скорости, который управляет электромотором, приводящим в действие подъемную лебедку крана, со средствами индикации процесса регулировки ограничителей грузоподъемности, причем предусмотрен монтаж подвесного динамометра между подъемным крюком и точкой закрепления, вследствие чего устройство позволяет моделировать нагрузку при помощи создаваемого мотором момента, измеряя значение этой нагрузки. Преимущественно, средства индикации содержат управляющую клавиатуру для указания положения «регулировка» каким-либо кодом, для указания разрешенного крутящего момента и, по возможности, для управления движением подъема в направлении подъема и спуска.
Преимущества способа и устройства, согласно изобретению, в целом следующие:
- Изобретение делает ненужным эталонные грузы, обычно четыре или пять различных грузов, для регулировок усилий, делая ненужным также любой транспорт и все манипуляции с такими грузами.
- Регулировка ограничителя грузоподъемности может быть проведена только одним оператором в случае использования подвесного динамометра с дистанционным считыванием.
- Система позволяет избежать всех ошибок в нагрузке или в сообщениях между оператором на земле и оператором, проводящим регулировки (в случае использования подвесного динамометра с дистанционным считыванием).
- Операции регулировки упрощены, сделаны более быстрыми и менее дорогостоящими при сохранении при этом желаемой точности.
Изобретение будет более понятно при помощи описания, которое следует со ссылками на схематичные чертежи, приложенные в качестве не ограничивающего примера выполнения, представляющие выполнение этого устройства для моделирования нагрузок на грузоподъемных агрегатах:
Фиг.1 - схематичный вид в целом башенного крана во время регулировки по способу моделирования нагрузок, являющемуся объектом изобретения;
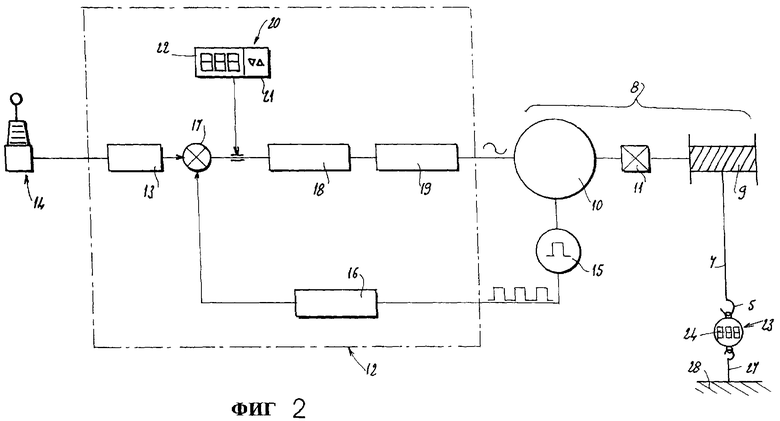
Фиг.2 - принципиальная схема, представляющая устройство, согласно изобретению, соединенное с вариатором скорости.
Фиг.1 представляет башенный кран с основанием 1, мачта 2 которого имеет распределительную стрелу 3, вдоль которой перемещается тележка 4. Кран обеспечивает подъем грузов при помощи крюка 5, соединенного со сложным блоком 6 и подъемным канатом 7, который образует, по меньшей мере, две ветви под тележкой 4, причем одна из ветвей каната 7 наматывается на барабан подъемной лебедки 8.
На фиг.2 подъемная лебедка 8 схематично показана со своим барабаном 9, приводимым во вращение электродвигателем 10 через редуктор 11.
Двигатель 10 управляется вариатором 12 скорости, который получает на входе 13 данные о скорости, задаваемой управляющим рычагом 14 типа «контроллер».
Датчик 15 скорости, соединенный с двигателем 10, передает на другой вход 16 вариатора 12 обратный сигнал о скорости и сустрактор 17 (определитель разности) 17 постоянно определяет разность между заданной скоростью и мгновенной реальной скоростью, даваемой обратным сигналом.
После сустрактора 17 двигатель 10 управляется посредством ступени 18 регулирования и ступени 19 мощности.
Прибор 20 ограничения момента также воздействует на ступень 18 регулирования. Прибор 20 содержит управляющую клавиатуру 21 и индикатор 22, показывающий коды или численное значение.
Функции регулирования скорости и регулирования момента, так как они схематически показаны на фиг.2, обычно встроены во все типы вариаторов скорости, используемых на башенных кранах.
В качестве внешних средств устройство включает подвесной динамометр 23, который в иллюстрируемом примере является динамометром с непосредственным считыванием, т.е. имеет непосредственно на нем установленный индикатор 24, показывающий значение растягивающего усилия F, измеряемое этим подвесным динамометром. В не показанном варианте подвесной динамометр - это динамометр с дистанционной индикацией, у которого замеренные усилия показаны на выносном корпусе, установленном в прямой видимости оператора, проводящего регулировку, причем этот оператор находится поблизости от подъемной лебедки 8.
Для использования подвесного динамометра его прикрепляют верхним концом 25 к грузоподъемному крюку 5. Другой конец 26 или нижний конец подвесного динамометра 23 прикреплен к неподвижной точке 27, укрепленной в земле 28; в не показанном варианте этот конец 26 подвесного динамометра 23 прикреплен к свободной массе, но вес которой превышает прикладываемое усилие с тем, чтобы эта масса не могла бы быть приподнята и образовывала бы эквивалент неподвижно закрепленной точки.
После такой установки подвесного динамометра процесс регулировки начинают, указывая код доступа, разрешающий проведение контроля ограничения грузового момента, даваемого двигателем 10, и узаконивая код доступа при помощи управляющей клавиатуры 21 прибора 20 ограничения момента.
Этот процесс регулировки содержит в свою очередь, в частности, операцию индикации на индикаторе 22 заранее заданного значения ограничения грузового момента двигателя 10, так что управление этим двигателем 10 с определенным таким образом грузовым моментом моделирует нагрузку в том смысле, что подвесной динамометр 23 подвергнут действию растягивающего усилия F, соответствующего этому моменту. Значение растягивающего усилия F, указанного на индикаторе 24 подвесного динамометра 23, может быть прочитано, и после этого процесс регулировки может быть продолжен (по общему описанию, уже приведенному выше). Этот процесс может быть управляем в том, что касается движения подъема в направлении подъема или спуска, используя существующий рычаг 14 управления; в предпочтительном варианте управление движением подъема в направлении подъема или спуска осуществляется при помощи управляющей клавиатуры 21, что дает централизованное управление для всего процесса регулировки.
Не выходят за рамки изобретения в том виде, в котором оно определено в прилагаемой формуле изобретения:
- выполнение различным образом крепления подвесного динамометра, например, к одной из точек самого крана;
- применение способа с вариациями скорости всех типов, позволяющей контроль грузового момента, таких как вариатор частот, вариатор напряжения или вариатор постоянного тока;
- применение того же способа и устройства ко всем типам грузоподъемных агрегатов, отличающихся от башенных кранов, оборудованных канатной лебедкой, чей двигатель управляется вариатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2490203C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| Устройство комплекса дирижабля-крана | 2022 |
|
RU2798252C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| Ограничитель перегрузки подъемных кранов | 1957 |
|
SU111164A1 |
| Способ экспериментального определения жесткости канатного подвеса для кранов мостового типа | 2022 |
|
RU2803775C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Подвесная грузовая тележка крана | 1988 |
|
SU1631028A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности может быть использовано для регулирования ограничителей грузоподъемности на башенных кранах. При осуществлении способа и реализации устройства используют подвесной динамометр с прямым или дистанционным управлением. Динамометр устанавливают между грузовым крюком и закрепленной точкой и после установки механизма подъема в положение «регулировка» осуществляют регулирование грузового момента. Для этого осуществляют сообщение заданного значения, ограничивающего грузовой момент электродвигателя, управляющего операцией подъема в направлении подъема, путем подачи команды этому электродвигателю и считывания значений растягивающих усилий, выдаваемых подвесным динамометром. Изобретение позволяет сократить продолжительность и стоимость регулировок ограничителей грузоподъемности. 2 н. и 9 з.п. ф-лы, 2 ил.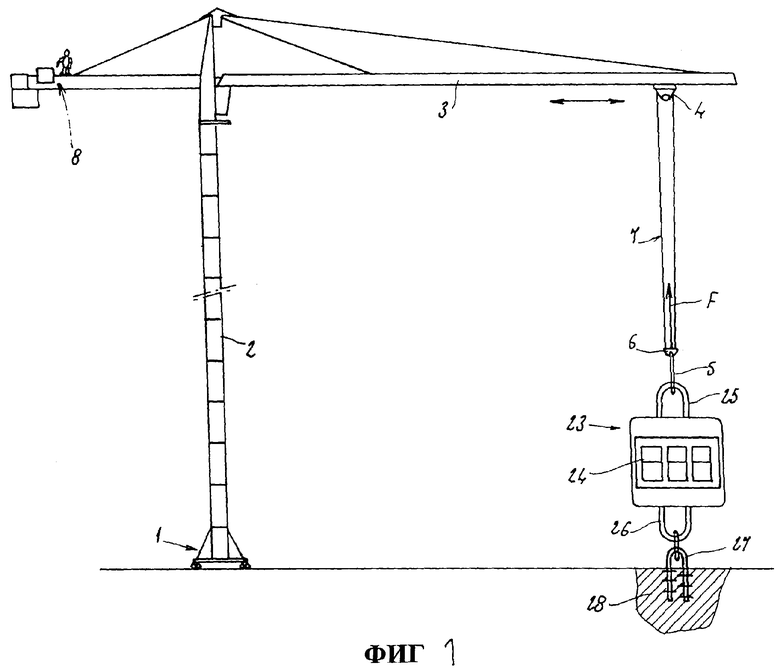
| Устройство для испытания стреловых кранов | 1980 |
|
SU933619A1 |
| Устройство для испытания крана под нагрузкой | 1977 |
|
SU623815A1 |
| Способ динамического испытания стреловых кранов | 1972 |
|
SU474495A1 |
| Устройство для испытания и регулировки ограничителя грузоподъемности стрелового крана | 1977 |
|
SU664083A1 |
| Способ получения целлюлозы | 1978 |
|
SU866022A1 |

