Изобретение относится к космической технике и может быть использовано для стабилизации формы, размеров и пространственной ориентации крупногабаритных конструкций в виде связки нескольких космических объектов (КО) на орбите вокруг небесного тела. Специальной областью применения изобретения служат крупногабаритные космические антенны.
Известны способ стабилизации связок КО с помощью гибкой связи (ГС) в виде динамических гибких контуров (контуров с "бегущей вдоль себя" ГС), имеющих форму, близкую к окружности [1] Недостатком этих способов является либо невозможность создания управляющих усилий, направленных из плоскости местного горизонта (ПМГ), либо неизбежность накопления запаса ГС на одном из КО и ее расхода с борта другого КО (при различной контурной скорости на верхнем и нижнем участках контура ГС).
Наиболее близким техническим решением к предлагаемому является способ стабилизации связки КО на орбите вокруг небесного тела, включающий соединение объектов гибкой структурой, формируемой в виде прямолинейного участка ГС между объектами, располагаемого вблизи ПМГ, и криволинейного участка ГС в форме замкнутого контура, располагаемого вблизи плоскости, содержащей местную вертикаль, и разделенного прямолинейным участком ГС как хордой на верхнюю и нижнюю части, сообщение ГС на криволинейном участке скорости движения вдоль ее контура и дифференциальное регулирование параметров верхней и нижней частей контура [2]
Дифференциальное регулирование параметров верхней и нижней частей контура ГС должно приводить к возникновению управляющего усилия, действующего на связанные КО и направленного из ПМГ, что позволяет стабилизировать горизонтальную ориентацию связки КО.
Однако, как показывает анализ, создать требуемое управляющее усилие (из ПМГ) удается далеко не всегда при выполнении ряда ограничений целевого и эксплуатационного характера. Так приходится допустить различную контурную скорость ГС в верхней и нижней частях околокругового контура (что нежелательно из-за расхода накопления ГС нас борту КО, которые вызывают усложнение бортовых систем КО и затрудняют использование контура ГС в качестве космической антенны).
Технической задачей изобретения является упрощение технических средств для стабилизации связки КО вблизи ПМГ; повышение эксплуатационных характеристик системы связанных КО, преимущественно при формировании с ее помощью космической антенны, обеспечение постоянства общей длины криволинейного контура ГС и одинаковой контурной скорости верхней и нижней частей контура; достижение возможности независимого управления взаимным положением связанным КО по вертикали (контроль разновысотности) и по горизонтали (контроль расстояния между КО).
Указанная техническая задача решается за счет того, что в известном способе стабилизации связки КО на орбите вокруг небесного тела, включающем соединение объектов гибкой структурой, формируемой в виде прямолинейного участка ГС между КО, располагаемого вблизи ПМГ, и криволинейного участка ГС в форме замкнутого контура, располагаемого вблизи плоскости, содержащей местную вертикаль, и разделенного прямолинейным участком ГС как хордой на верхнюю и нижнюю части, сообщение ГС на криволинейном участке скорости движения вдоль ее контура и дифференциальное регулирование параметров верхней и нижней частей контура, криволинейный участок ГС формируют с длиной, превышающей длину окружности, диаметр которой равен длине прямолинейного участка ГС, а дифференциальное регулирование параметров верхней и нижней частей контура осуществляют путем изменения длин этих частей при поддержании общей длины контура постоянной.
На фиг.1 изображена связка двух КО, расположенных вдоль орбиты (в ПМГ); на фиг. 2-4 представлены различные конфигурации гибкого контура, создающие различные управляющие силы на КО в вертикальном направлении; на фиг.5 система сил, действующих на один из КО со стороны ГС; на фиг.6 конструктивно-функциональная схема управления элементами гибкой структуры, соединяющей КО (для одного из КО); на фиг.7 представлены законы изменения управляющего и формостабилизирующего усилий, действующих на КО при дифференциальном регулировании длин верхней и нижней частей контура.
Связка КО 1 (орбитальной платформы или станции) и КО 2 (специализированного модуля, платформы и т.д.) совершает полет по орбите 3 вокруг небесного тела 4 (фиг.1). Оба КО связаны прямолинейным участком 5 ГС, а также контуром ГС, состоящим из верхней 6 и нижней 7 частей (контур симметричен относительно местной вертикали 8, проходящей через середину расстояния между КО 1 и 2, которое обозначено Х*; Х* ≈длина ГС 5). ГС вдоль контура приведена в движение с контурной скоростью v, одинаковой для верхней и нижней частей. Длина контура (L) выбрана большей длины окружности 9. т.е.
L Lв + Lн > π Х* (1) где Lв, Lн длины верхней 6 и нижней 7 частей контура.
Введены обозначения
χ ≡ Lн/Lв; K ≡ L/πΧ* (2) где χ параметр управления; К > 1 параметр избытка длины контура относительно длины окружности 9 (фиг.1).
Если скорость v достаточно велика (v >> ωX*, где ω средняя угловая орбитальная скорость центра масс связки), то части контура всегда близки к дугам окружности с радиусами
Rв=  Rн=
Rн=  (3)
(3)
соответственно для верхней 6 и нижней 7 частей контура (фиг.3, 4).
Секторные углы ϕв и ϕн зависят от К и Х и определяются из геометрических уравнений
ϕв=  1
1  sin
sin  ; ϕн=
; ϕн=  1
1  sin
sin  (4)
(4)
Цель стабилизации связки КО заключается в том, чтобы, во-первых, парировались возмущения, приводящие к уходу КО по вертикали (параллельно линии 8), ибо горизонтальное положение связки "1-5-2" (фиг.1) неустойчиво. Во-вторых, участок 5 ГС должен все время находиться под натяжением Тн > 0 (фиг. 5), чтобы осуществлялась фиксация расстояния между КО 1 и 2 и были возможны (небольшие) изменения этого расстояния в заданных пределах (за счет подтягивания или стравливания ГС 6).
Указанные усилия оказываются выполненными лишь при К > 1, причем первое условие обеспечено трансформацией контура от симметричной ( χ 1, фиг.2) к несимметричным ( χ ≠ 1) конфигурациям.
Ниже рассматривается случай увеличения длины верхней 6 и уменьшения длины нижней 7 частей контура ( χ < 1; фиг.3, 4) для создания управляющей силы  , направленной вверх (при компенсации "ухода" КО 2 вниз). Обратный случай ( χ > 1) аналогичен. Необходимо учесть, что масса КО 2 гораздо меньше массы КО 1.
, направленной вверх (при компенсации "ухода" КО 2 вниз). Обратный случай ( χ > 1) аналогичен. Необходимо учесть, что масса КО 2 гораздо меньше массы КО 1.
При несимметричном (относительно хорды линии ГС 5) контуре на КО 2 со стороны частей 6 и 7 ГС действуют различные силы натяжения  и
и  (фиг. 5), равнодействующая которых
(фиг. 5), равнодействующая которых  раскладывается на управляющую (вертикальную) силу
раскладывается на управляющую (вертикальную) силу  и формостабилизирующую (горизонтальную) силу
и формостабилизирующую (горизонтальную) силу  , уравновешиваемую натяжением
, уравновешиваемую натяжением  ГС 5.
ГС 5.
Силы натяжения, как следует из механики, имеют величины ≡ T
≡ T
При использовании (3) видно, что первые слагаемые (5) дают в сумме Fv 0 при любых трансформациях контура. Напротив, эти же слагаемые ответственны за возникновение силы Fн (а сила Fv таким образом определяется разностью ΔвG -ΔнG ). Окончательный результат имеет вид
Fv= 

(6)
Fн=  (ctg ϕв+ ctg ϕн) где mк μ π КХ* масса гибкого контура.
(ctg ϕв+ ctg ϕн) где mк μ π КХ* масса гибкого контура.
Зависимости ускорений аv,н Fv,н/m, создаваемых силами (6) на КО 2, от степени трансформации контура представлены на фиг.7 для типичного полета связки по низкой орбите вокруг Земли (с высотой до 500-700 км) при mк m (массе КО 2); Х* 1000 м; К 1,5; v 10 м/с. Для наглядности вместо χ использована относительная доля длины контура, приходящаяся на верхнюю часть контура ≡
≡  · 100%
· 100%  · 100% (7)
· 100% (7)
Видно, что при достаточно сильной ( ≈ 80%) трансформации контура формостабилизирующая сила Fн становится нулевой и далее отрицательной (т.е. теряется натяжение ГС 5). Этим ограничены пределы управления связкой. Достижимые силы Fv достаточны для парирования "уходов" КО 2 по вертикали на ≈ 100-200 м (на угол ±6о-12о из ПМГ). При выборе больших длин контура (увеличении К) пределы и возможности управления расширяются.
≈ 80%) трансформации контура формостабилизирующая сила Fн становится нулевой и далее отрицательной (т.е. теряется натяжение ГС 5). Этим ограничены пределы управления связкой. Достижимые силы Fv достаточны для парирования "уходов" КО 2 по вертикали на ≈ 100-200 м (на угол ±6о-12о из ПМГ). При выборе больших длин контура (увеличении К) пределы и возможности управления расширяются.
Для практической реализации способа на каждом из КО предусмотрены (фиг. 6): привод 10 скоростной протяжки (запуска торможения) ГС контура 6-7 с управляющим блоком 11, связанным информационными каналами с системой 12 индикации положения КО 2 относительно КО 1 (радиолокационной или лазерной), а также с навигационной системой 13 (автономной или кооперированной с наземными средствами контроля орбиты). Система 13 снабжена известными блоками для определения параметров орбиты (в частности, угловой скорости ω) и построения ПМГ, например, размещенным на КО 1 датчиком местной вертикали. Кроме того, на борту одного из КО установлено устройство контроля и изменения длины и натяжения ГС 5 (лебедка с приводом, типичная для обычных тросовых систем), связанное с системами, аналогичными 11, 12 и 13 (условно не показано). На каждом КО предусмотрены направляющие механизмы 14, 15 для частей 6, 7 гибкого контура, снабженные приводами перемещения относительно КО, управляемыми по сигналам блоков 11. С этими механизмами могут быть интегрированы датчики скорости контурного движения ГС и натяжения частей 6 и 7 контура (не показаны). Если контур выполнен электропроводным (в случае его использования в качестве антенны), то приводом 10 может служить статор индукционно-линейного электродвигателя ("ротором" является сама ГС контура). В этом варианте со статором 10 может быть объединен блок 16 питания антенны, связанный соответствующими каналами с бортовыми приемно-передающими системами.
В других случаях привод 10 скоростной протяжки 10 может выполняться на базе хорошо известных элементов и узлов аналогичного назначения. Помимо описанных выше систем 12 и 13 управляющие блоки 11 на КО 1 и 2, а также устройство управления ГС 5 могут быть связаны с системой ручного (пультом космонавта-оператора) или автоматического управления формой и ориентацией связки КО централизованного типа.
Описанные выше технические средства в процессе реализации способа функционируют следующим образом.
Связка КО 1 и 2 выводится на орбиту и развертывается вдоль горизонтали (фиг.1). При этом в процессе разведения КО 1 и 2 (стравливания ГС 5) части 6 и 7 контура переводятся из транспортного положения (из бухт хранения) соответственно в верхнее и нижнее свободное положение (при v 0 за счет гравитационно-градиантных сил). В частности, контейнеры с хранимыми частями 6 и 7 ГС могут отделяться вверх и вниз от орбиты 3 и по мере удаления контейнеров вверх и вниз из них могут свободно выдаваться соответствующие части ГС.
После разведения связки КО нас требуемую длину ГС 5 и успокоения свободно развернутых частей 6 и 7 (имеющих под действием градиентных сил форму полуовалов) синхронно запускаются приводы 10 на КО 1 и КО 2, сообщая ГС контура небольшое ускорение протяжки, в результате чего контурная скорость v плавно достигает требуемой величины. Процесс может контролироваться визуально (с пульта оператора), причем возможно использование дополнительной стабилизации связки с помощью реактивных (газоструйных) двигателей.
По завершении формования симметрично гибкой структуры (фиг.2) связка переводится в режим стабилизации. Системы 12 и 13 вырабатывают совокупность данных о ПМГ, движении и положении КО 2 относительно нее. Эти данные логически обрабатываются и преобразуются в управляющие сигналы блоком 11, который контролирует работу привода 10 по цепи обратной связи (фиг.6).
Синхронизация приводов 10 на КО 1 и 2 и обмен другой информацией между КО может, в частности, осуществляться через ГС (если она выполнена в виде тонкого кабеля).
При отклонении КО 2 от ПМГ система индикации 12 фиксирует величину этого отклонения, скорость его изменения и т.д. (в частности, параметры θ (t),  (t), где θ угол между ГС 5 и ПМГ). Точность индикации скорости отклонения |
(t), где θ угол между ГС 5 и ПМГ). Точность индикации скорости отклонения |  | мин как показывают оценки, должна удовлетворять условию
| мин как показывают оценки, должна удовлетворять условию
(0,2-0,4)  ≫
≫ 
(8)
При Х* ≈103 м и v ≈10 м/с получают |  |мин < 10-3 c-1 (т.е. ≈ ω ), что вполне допустимо измерительным средствам современных космических систем.
|мин < 10-3 c-1 (т.е. ≈ ω ), что вполне допустимо измерительным средствам современных космических систем.
По данным измерений блок 11 на КО 2 (или связанная с ним ЭВМ) прогнозирует отклонение КО 2 от ПМГ на последовательные моменты времени и определяeт временной закон изменения силы (фиг.3 и 4), компенсирующий это отклонение так, чтобы его амплитуда не вышла за допустимые пределы. Этот закон в силу (1) (6), приводит к определенному изменению длин  (t) и Lн(t) L Lв(t), в соответствии с которым синхронизированные блоки 11 корректируют работу приводов 10.
(t) и Lн(t) L Lв(t), в соответствии с которым синхронизированные блоки 11 корректируют работу приводов 10.
Если требуется увеличить Lв(t) (фиг.3-4), то скорость протяжки ГС приводом 10 на КО 2 несколько уменьшается, а скорость протяжки ГС аналогичным приводом на КО 1 несколько увеличивается. При этом сигналы с датчиков скорости протяжки ГС, объединенных с механизмами 14 и 15 на КО 2 (фиг.6) и аналогичными механизмами на КО 1, интегрируются в блоках 11, давая фактическое увеличение длины Lв(t) и уменьшение длины Lн(t) откуда определяются параметр χ(t) и компенсирующая сила  (t). Дополнительный контроль этой силы осуществляется по информации с датчиков натяжения ГС, установленных в механизмах 14 и 15 (на обоих КО).
(t). Дополнительный контроль этой силы осуществляется по информации с датчиков натяжения ГС, установленных в механизмах 14 и 15 (на обоих КО).
В процессе изменения длины частей 6 и 7 контура блоки 11 смещают механизмы 14 и 15 так, чтобы силы  и
и  (фиг.5) не создавали недопустимых моментов относительно центров масс КО. Соответствующие команды на блоки 11 подаются от бортовых систем контроля движения КО относительно центра масс (например, на базе гироплатформ, лазерных гироскопов и др.)
(фиг.5) не создавали недопустимых моментов относительно центров масс КО. Соответствующие команды на блоки 11 подаются от бортовых систем контроля движения КО относительно центра масс (например, на базе гироплатформ, лазерных гироскопов и др.)
В управляющие блоки 11 (или связанные с ними ЭВМ) целесообразно заложить стратегию выбора законов  (t)(⇐⇒ LВ(t)) оптимальную по точности, или быстродействие приведения связки в горизонтальное положение (симметричную конфигурацию по фиг.2).
(t)(⇐⇒ LВ(t)) оптимальную по точности, или быстродействие приведения связки в горизонтальное положение (симметричную конфигурацию по фиг.2).
Регулирование расстояния между КО 1 и 2 может производиться независимо за счет изменения длины ГС 5 (так как всегда Тн > 0). Более эффективным может быть изменение длины ГС 5, согласованное с изменением длин частей 6 и 7 гибкого контура (дополнительный резерв стабилизации).
Использование: в космической технике, при стабилизации формы, размеров и пространственной ориентации крупногабаритных конструкций в виде связок нескольких космических объектов. Сущность изобретения: космические объекты (КО) 1,2, расположенные вдоль орбиты 3 в плоскости местного горизонта, соединяют гибкой структурой в виде прямолинейного участка 5 гибкой связи (ГС) между КО и криволинейного 6,7 ориентированного в вертикальной плоскости замкнутого контура, имеющего данный прямолинейный участок своей хордой. Длину контура выбирают большей длины окружности, построенной на указанной хорде как на своем диаметре, и сообщают ГС скорость движения вдоль ее контура. Для создания приложенных к КО стабилизирующих сил по вертикали изменяют длины частей 6,7 контура, одна (6) из которых расположена выше, а другая (7) ниже прямолинейного участка 5 ГС, поддерживая общую длину контура постоянной. Регулирование расстояния между КО производят изменением длины прямолинейного участка 5 ГС, который находится в натянутом состоянии благодаря динамической реакции контура. Данный контур может использоваться в качестве крупногабаритной космической антенны. 7 ил.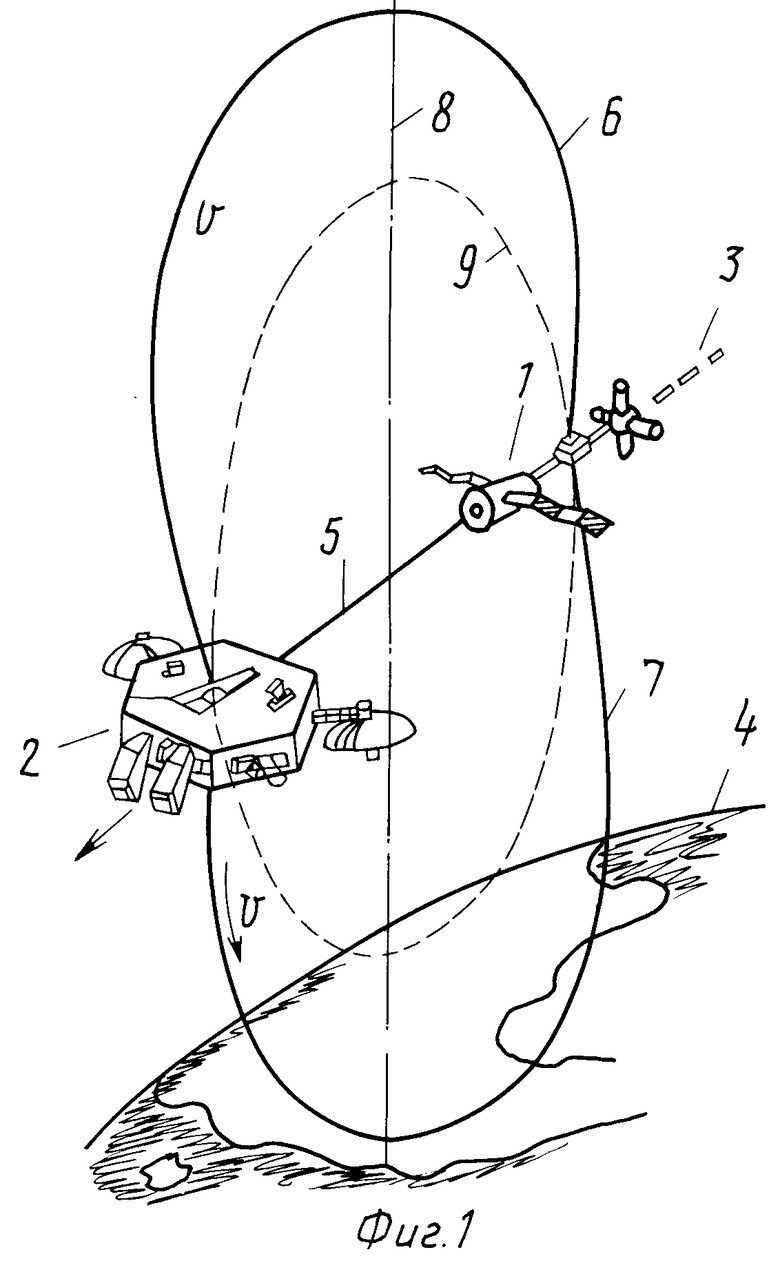
СПОСОБ СТАБИЛИЗАЦИИ СВЯЗКИ КОСМИЧЕСКИХ ОБЪЕКТОВ НА ОРБИТЕ ВОКРУГ НЕБЕСНОГО ТЕЛА, включающий соединение объектов гибкой структурой, формируемой в виде прямолинейного участка гибкой связи между объектами, располагаемого вблизи плоскости местного горизонта, и криволинейного участка гибкой связи в форме замкнутого контура, располагаемого вблизи плоскости, содержащей местную вертикаль, и разделенного прямолинейным участком гибкой связи как хордой на верхнюю и нижнюю части, сообщение гибкой связи на криволинейном участке скорости движения вдоль ее контура и дифференциальное регулирование параметров верхней и нижней частей контура, отличающийся тем, что криволинейный участок гибкой связи формируют длиной, превышающей длину окружности, диаметр которой равен длине прямолинейного участка гибкой связи, а дифференциальное регулирование параметров верхней и нижней частей контура осуществляют путем изменения длин этих частей при поддержании общей длины контура постоянной.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Андреев А.В., Куркин В.И | |||
| Космические конструкции с динамическими контурными элементами в сб | |||
| "Крупногабаритные космические конструкции | |||
| Тезисы докладов Н-Т конференции", Севастополь, 1990, с.21-22. | |||
