Изобретение относится к средствам управления движением космических объектов в слабом внешнем поле активных и инерционных сил и может быть использовано в инспекционно-сервисных, робототехнических и иных операциях на орбите вокруг планеты, проводимых в состоянии полета группы объектов, близком к условиям инерциального пространства.
Известны способы управления перемещениями связанных объектов (например, дистанционных привязных роботов-телеоператоров) путем воздействия на эти объекты силой натяжения гибкой связи (ГС), при помощи которой они соединены с управляющими ("базовыми") космическими объектами. Итоги науки и техники. Серия "Ракетостроение и космическая техника". Т.12//М. 1991, с.120-121.
Область применения данных известных способов ограничена требованием наличия внешних силовых факторов (активных и/или инерционных сил), обеспечивающих ненулевое натяжение ГС: Т≠0 в процессе управления. Таким силами обычно служат гравитационно-градиентные, центробежные и кориолисовы (при синхронном вращении связки объектов с орбитальной угловой скоростью вокруг ее центра масс), а также силы Д'Аламбера при ускоренном схождении/расхождении связанных объектов вдоль ГС.
Однако, характерны случаи, когда связанные космические объекты (КО) занимают положение, близкое к неизменному в инерциальном пространстве, будучи удалены друг от друга на расстояние 100.103 м, а перемещения одного из КО (привязного робота и т.п.) носят характер "позиционирования" в окрестности некоторого космического аппарата: орбитальной станции, платформы, обслуживаемого спутника и т.д. В таких условиях все отмеченные выше внешние силовые факторы весьма малы, и натяжение ГС Т приблизительно равно О.
Наиболее близким техническим решением, известным из уровня техники, является способ управления перемещениями связанного объекта, включающий воздействие на объект вариациями силы натяжения ГС, которые возбуждают генерированием волн поперечных смещений, распространяющихся вдоль линии невозмущенной ГС от одного из связанных объектов к другому. Экспресс-информация "Астронавтика и ракетодинамика", N 39, 1989, реф. 142, - Изд. ВИНИТИ).
Недостатком известного способа, выбранного в качестве прототипа, по-прежнему является необходимость создания в ГС ненулевого натяжения за счет внешнего поля сил, т.к. при Т=0 волны вдоль ГС не распространяются.
Техническим результатом, достигаемым с помощью предлагаемого изобретения, является расширение области управления перемещениями связанного КО, при котором сохраняются главные преимущества использования для этого управления ГС (экономичность, физико-химическая чистота проведения операций, при необходимости их достаточная скрытность и т.д.), а также обеспечивается достаточная эффективность управления при практическом отсутствии внешних факторов нагружения ГС между связанными КО.
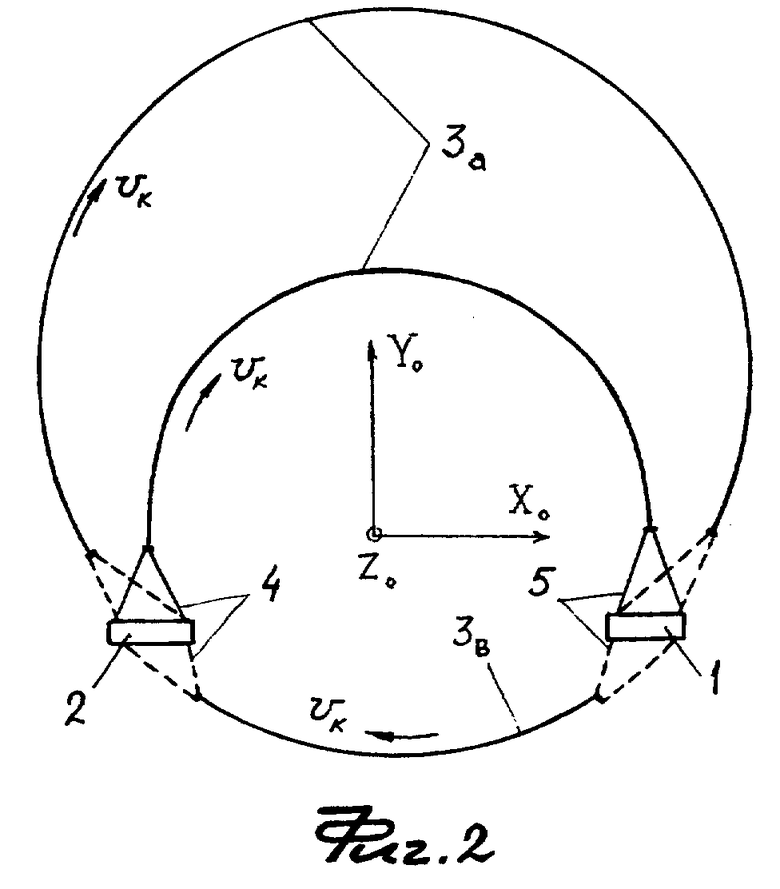
Указанный технический результат достигается тем, что в известном способе управления перемещениями связанного КО невозмущенную ГС меду объектами формируют по линии, представляющей собой по меньшей мере одну дугу окружности, придавая гибкой связи контурное движение вдоль этой линии в направлении распространения указанных вол смещений, а при генерировании этих волн поддерживают постоянной скорость движения гибкой связи вдоль ее контура, образующегося в окрестности указанной дуги окружности.
При этом в одном из предпочтительных вариантов, при управлении перемещениями одного из объектов генерируют распространяющиеся к нему волны смещений на другом объекте.
В другом предпочтительном варианте реализации способа, при управлении перемещениями одного из объектов генерируют распространяющиеся от него волны смещений на самом этом объекте.
Согласно существенному моменту данного изобретения, в способе генерируют волны радиальных смещений элементов гибкой связи относительно указанной дуги окружности.
При этом, с целью увеличения размерности управления, генерируют волны двух типов: со смещениями элементов гибкой связи в радиальном направлении и в направлении, перпендикулярном плоскости указанной дуги окружности, согласуя фазово-частотные характеристики обоих типов волн для получения вариаций силы натяжения гибкой связи, воздействующих на связанный объект одновременно в двух указанных направлениях.
Кроме того, для повышения точности отработки требуемого управления на объекте, к которому распространяются генерируемые волны, механически отслеживают смещения элементов гибкой связи в точке ее соединения с этим объектом.
Для исключения накопления/расхода ГС на борту связанных КО, невозмущенную гибкую связь формируют по линии, представляющей собой пару соединяющих объекты дуг окружностей, придавая гибкой связи контурное движение вдоль каждой из дуг во взаимно противоположных направлениях, а волны генерируют на обоих связанных объектах, воздействуя поочередно или одновременно, на каждый объект вариациями силы натяжения гибкой связи со стороны каждой из дуг окружностей.
Наконец, для уменьшения нежелательных возмущений углового движения, точки соединения гибкой связи с объектами выбирают так, чтобы интегральный импульс воздействующих на каждый объект вариаций силы натяжения гибкой связи проходил через средний центр масс объекта, давая нулевой интегральный момент указанных вариаций силы натяжения относительно этого центра масс.
Сущность изобретения, с точки зрения механики, состоит в том, что в качестве невозмущенной ГС используют существенно динамическую ГС ("бегущий" трос), в которой действует ненулевое истинное натяжение Т и реактивная компонента μv
T*= T-μv
причем устойчивой формой контура ГС является круговая (теоретически возможна любая форма ГС, но под действием различных малых возмущений иные формы ГС будут неустойчивы). Наличие истинного натяжения Т≠0 делает возможным распространение вдоль ГС определенной системы волн поперечных смещений, вызывающих вариации δT*≢ 0 которые и используются в качестве управляющих воздействий на КО ( на связанные объекты в рассматриваемом случае действует не Т, как обычно, а именно Т* и его вариации).
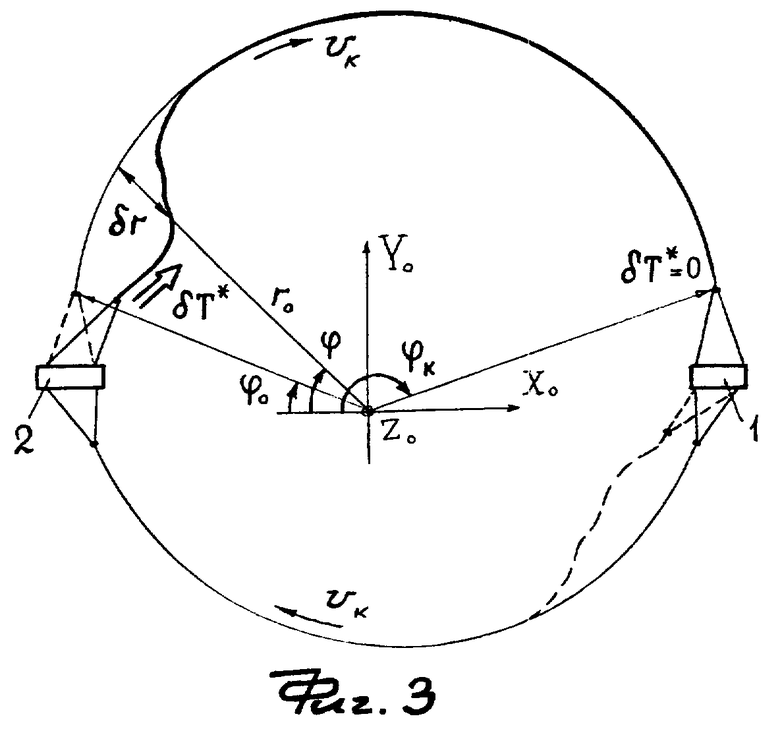
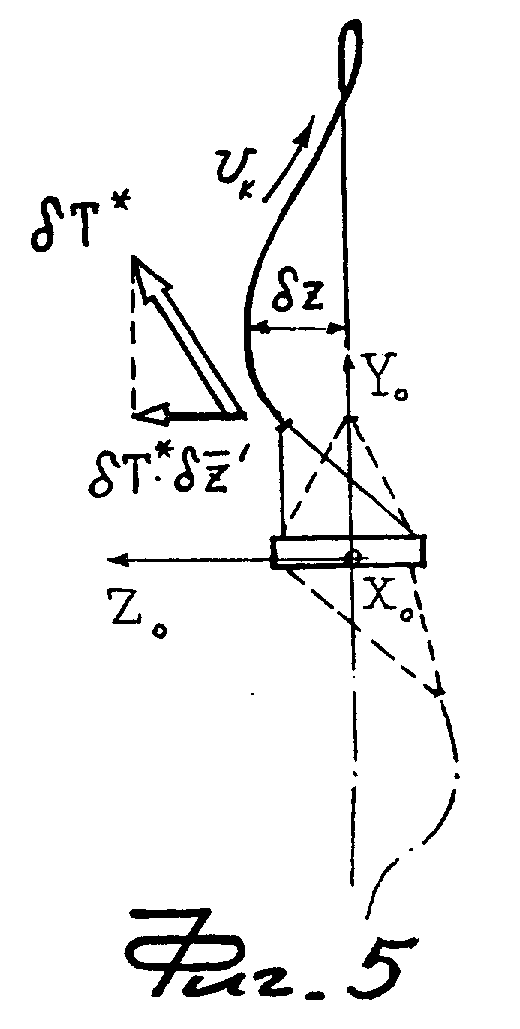
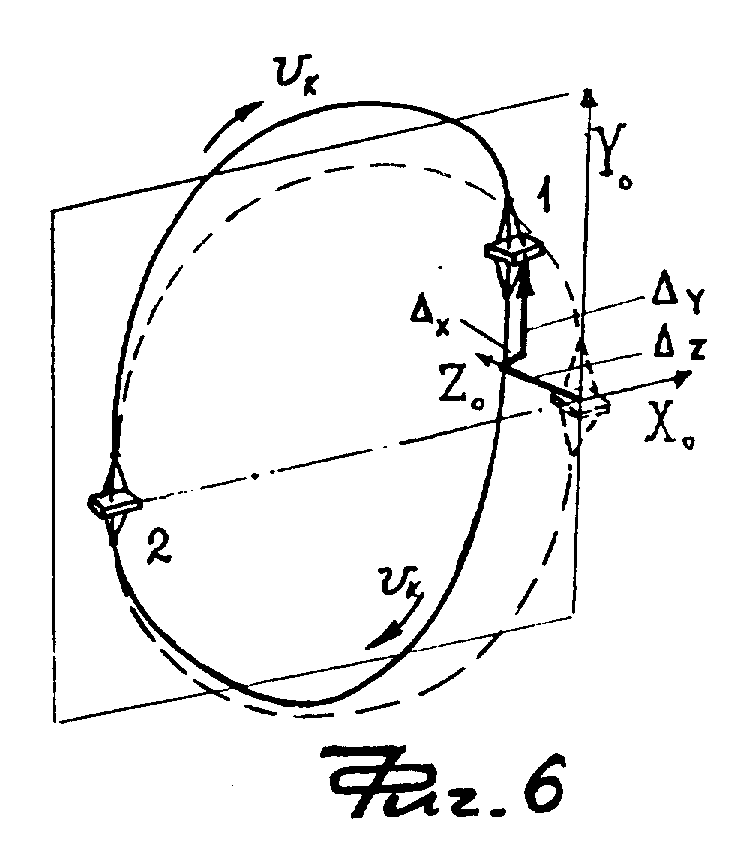
На фиг. 1 дан общий вид связки управляющего и управляемого КО; на фиг. 2 примеры формирования линий невозмущенной ГС; на фиг. 3 возбуждение волны смещений на управляющем КО; на фиг. 4 прием волны смещений на управляемом КО; на фиг. 5 возбуждение волны смещений элементов ГС перпендикулярно плоскости расположения невозмущенной ГС; на фиг. 6 перемещение связанного КО в результате осуществления волнового управления; на фиг. 7 генерируемый и принимаемый волновые сигналы (вариаций силы натяжения ГС и радиальных смещений), в одном из примеров их синтеза; на фиг. 8 аналогичные волновые сигналы, в другом примере их синтеза; на фиг. 9 блок-схема устройства для реализации способа согласно изобретению, в одном из возможных вариантов исполнения этого устройства; на фиг. 10 возможный вариант конструктивного исполнения основных элементов устройства для реализации предлагаемого способа.
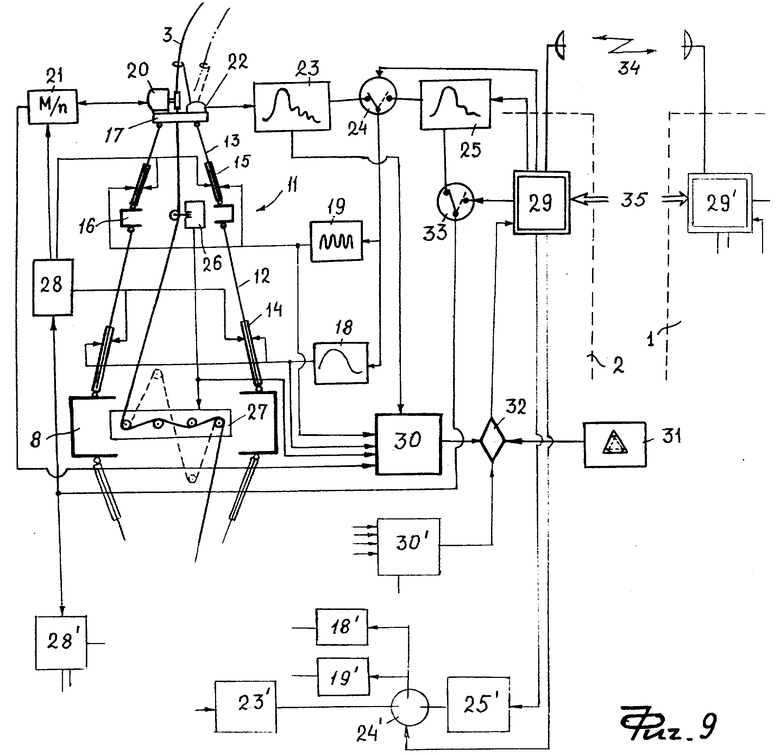
Способ управления перемещениями связанного КО, в соответствии с предлагаемым изобретением, может быть реализован в рамках космической системы, содержащей управляемый КО 1 (фиг. 1), связанный с управляющим (базовым) КО 2 при помощи динамической ГС, включающей в себя, например, две гибких ветви 3а и 3b. ГС формируется и управляется посредством устройств протяжки/генерирования волн (УПГВ) 4, 5 установленных на КО 1, 2. Ветви ГС 3а, 3b предпочтительно, являются частями единого гибкого замкнутого контура, совершающего циркуляцию с контурной скоростью Vk между КО 1, 2. УПГВ содержат в качестве основных своих элементов многостепенные отклоняемые мачты (штанги) с трансформируемыми звеньями, снабженными приводами трансформации; с мачтами интегрированы механизмы протяжки ГС (см. ниже).
Управляемый КО 1 является, в частности, дистанционным роботом, выполняющим некоторые (например, монтажно-сборочные) операции в пределах рабочей зоны 6 в окрестности некоторого космического аппарата 7 (платформы, орбитальной станции и т.д.). Позиционирование (перемещения) КО 1 в зоне 6 осуществляется посредством одной или двух ветвей 3а, 3b ГС. Характерные размеры зоны 6 10.100 м; расстояние между КО 1 и 2 - 100.1000 м. Невозмущенная ГС лежит в плоскости Y0X0 инерциальной системы координат Y0X0Z0; ось Z0 перпендикулярна этой плоскости.
Ветви невозмущенной ГС могут формироваться с различной угловой протяженностью (задаваемой центральным углом ψ ≡ Φк-Φo фиг. 3): в виде полуокружности ψ = π пологой j < π или круто выпуклой j > π дуги. Соответственно, в первом случае воздействие волн натяжения на КО 1 будет происходить по оси Y0: во втором случае также и в направлении X0 (на сближение КО 1 и 2); в третьем случае по оси Y0 и в направлении +X0 (на удаление КО 1 и 2). При формировании дуг 3а и 3b (фиг. 2) мачты 4, 5 УПГВ устанавливаются в соответствующие исходные наклонные положения.
УПГВ может представлять собой (унифицированный) модуль, сопрягаемый с КО различного назначения и типа. Модуль имеет основание в виде рамы 8 (фиг. 10) с периферийными узлами 91, 92, 93, 94 стыковки с целевыми и служебными отсеками 101, 102, 103, 104 некоторого космического аппарата (робота, платформы и т.д.). Через узлы 91.94 производится необходимое объединение бортовых систем блоков 101.104 (ориентации/стабилизации, электропитания, терморегулирования и т.д.) с оборудованием УПГВ 4,5. Соответствующие переходники и разъемы для этих целей хорошо известны в космической технике.
На раме 8 установлены (например, с двух сторон) отклоняемые мачты 11 с трансформируемыми звеньями 12, 13 (число тех и других может быть от трех до четырех). Каждое из звеньев 12 снабжено приводом трансформации 14, а каждое из звеньев 13 приводом 15. Группа звеньев 12 шарнирно связана с рамами 8 и 16, а группа звеньев 13 с рамами 16 и 17. (Таким образом, здесь использована кинематическая схема, подобная той, которая применяется уже сравнительно давно в таких системах как многостепенные пилотажные стенды-тренажеры; данные системы обеспечивают высокоточное сложное пространственное перемещение элементов типа рам 8, 16 и 17 отрабатывая широкий спектр задаваемых эволюций).
Звенья 12 с приводами 14 (фиг. 9) обеспечивают широкоамплитудные (приблизительно 10.30 м) и низкочастотные (с периодом от десятков секунд до нескольких минут) смещения рамы 16 относительно рамы 8, при этом приводы 14 дифференцировано задействуются от задатчика 18 низкочастотных составляющих спектра генерируемого сигнала.
Звенья 13 с приводами 15 (фиг. 9) обеспечивают умеренные и малые (≲ 1.5 м) амплитуды и относительно высокие частоты (с периодом порядка секунд и менее) смещений рамы 17 относительно рамы 16, при этом приводы 15 дифференцированно задействуются от задатчика 19 высокочастотных составляющих спектра генерируемого сигнала.
На раме 17 установлен привод 20 протяжки ГС 3 (состоящей из ветвей 3а, 3b). Привод 20 содержит ведущие элементы (наприм. шкивы и ролики, связанные с валом электродвигателя) и направляющие приспособления известного типа. Привод снабжен управляющим боком 21, содержащим датчики: оборотов двигателя (тахометр) и момента на валу.
На раме 17 также смонтировано взаимодействующее с ГС 3 следящее устройство 22 (механического или безконтактного типа), фиксирующее радиальные (боковые) смещения ГС относительно заданного направления ее запуска/приема приводом 20. Устройство 22 связано с блоком 23 для спектрального анализа фиксируемых смещений ГС и их декомпозиции на высокочастотную и низкочастотную составляющие, которые вводятся после их необходимого преобразования в задатчики 18 и 19 через переключатель 24. Переключатель 24 может подключать к задатчикам 18, 19 либо уже описанный выше блок 23 (в следящем режиме работы УПГВ), либо блок 25 синтеза/декомпозиции управляющего сигнала (в режиме генерирования волн смещений).
С основанием 8 связан направляюще-демпфирующий блок 26, поддерживающий ГС 3 в состоянии стабильного движения относительно мачты УПГВ. С блоком 26 может быть совмещен датчик количества (длины) протяжки ГС в дополнение к тахометру блока 21. Предпочтительно, со стороны второй мачты, установленной на этом же основании 8, симметрично первому расположен другой направляюще-демпфирующий блок (условно не показан). Между обоими блоками 26 внутри рамы основания 8 (фиг. 10) предусмотрен механизм 27 для стабилизации натяжения и компенсации изменения длины участка ГС между приводами 20 протяжки. Данный механизм достаточно традиционен для линий протяжки ГС (нитей, волокон, ремней и т.п.) и поэтому подробно не описывается. Механизм 27 может действовать автоматически, с дополнительным контролем от одного или двух блоков 26.
Подчеркнем, что устройства типа 26 и 27 ответственны за стабильное движение/натяжение ГС 3 только "внутри" КО (между входом и выходом ГС в районе приводов 20). Внешней участок ГС: ее ветви 3а 3b (фиг. 1, 2) - регулируется только путем задания соответствующих оборотов и моментов на валу приводов 20 (с помощью блоков 21).
Режим работы приводов 20 задается через блоки 21 с помощью устройства ввода режимов 28, связанного с центральным блоком 29 управления УПГВ (центральным УПГВ-процессором). Имеется два основных режима работы УПГВ и, соответственно, приводов 20: формирования невозмущенной ГС (ФН/ГС) и генерирования волн вдоль ГС (ГВ/ГС). Моментные характеристики двигателей приводов 20 в указанных режимах могут существенно различаться.
Обратная связь исполнительных элементов УПГВ и датчиков (14, 15, 20-21, 22-23, 26) с центральным процессором 29 осуществляется через блок 30 телеметрического типа, причем даваемая этим блоком информация о текущем состоянии УПГВ комплексируется с информацией о движении и ориентации КО, поступающей от штатной бортовой системы 31 управления КО (системы ориентации/стабилизации КО). После необходимого согласования и преобразования поступающей информации в "смесительном" блоке 32 данные подаются в центральный блок управления 29, который соответственно корректирует команды, посылаемые на блок 25 или на устройство 28 ввода режимов приводов 20. При этом в режиме ФН/ГС центральный процессор 29 подключается через управляемый им переключатель 33 к устройству 28 (одновременно переключатель 33 отключает синтезатор 25 от этого устройства).
На фиг. 9 представлены основные элементы одной из мачт УПГВ для другой мачты (фрагментарно показанной на фиг. 9) состав элементов аналогичен, однако устройства 29, 31, 32, 33, предпочтительно, являются общими для обеих мачт, обеспечивающими согласованную их работу (система 31, очевидно, единственная на борту каждого из КО 1, 2). Процессор 29 связан с обоими блоками 25, 25' и переключателями 24, 24', а также через переключатель 33 с обоими устройствами 28, 28' мачт УПГВ. По каналу 34 информационного обмена (например, радиоканалу) центральный управляющий блок 29 КО 1 связан с аналогичным блоком 29' другого КО 2. В блоки 29, 29' вводятся команды директивного уровня от единого центра управления системой связанных КО (35); данный центр (в т.ч. пульт оператора) может располагаться на базовом КО 2, на некотором третьем КО или на Земле.
При реализации предлагаемого способа управления вышеописанная система КО 1, 2 функционирует следующим образом.
На орбите вокруг планеты от базового КО 2 отделяется управляемый КО 1 в направлении рабочей зоны 6 (фиг. 1). Ветви 3а, 3b ГС (при Vk=0) освобождаются от транспортирующих средств (не показаны) и отводятся, при сообщении им некоторых импульсов отделения, в направлениях ± Y0. По мере распрямления движущихся по инерции ветвей ГС, запускаются приводы 20 протяжки (переключатель 33 на каждом КО сообщает блок 29 с устройством 28; блок 29 задает устройствам 28, 28' вспомогательный режим нарастания натяжения и скорости протяжки ГС при условии: Т μv
Переключатели 24, 24' сообщают блоки 23 (каждый пары мачт УПГВ на каждом из КО 1, 2) с задатчиками 18, 19, переводя приводы трансформации 14, 15 мачт в следящий режим. В данных условиях формируются круто выпуклые дуги ГС (типа 3а на фиг. 2), а кажущееся натяжение Т* > 0 в них обеспечивает торможение удаляющегося от КО 2 КО 1 при подходе последнего к рабочей зоне 6.
После этого осуществляется режим ФН/ГС, для чего ветви ГС (с околокруговой формой, полученной в процессе их плавного распрямления при тормозящем и стабилизирующем действии натяжения Т* > 0) переводятся в режим контурного движения при условии: Т*=Т μv
где П обороты двигателей протяжки; М моменты на валу; К, К1. весовые коэффициенты. Знаки "+" относятся к приводам, выдающим ГС, а знаки "-" к приводам, принимающим ГС. Пара (п*, М*) для всех четырех приводов протяжки 20 отвечает условию Т*=0 (в процессе стабилизации по закону (2) или иному, например нелинейному закону обратной связи, значения (п, М) для различных приводов 20, вообще говоря различны - соответствующие компенсации длины ГС внутри каждого КО производятся механизмами 27). Параметры формирующейся ГС могут контролироваться и дополнительными средствами: например, с помощью видеокамер на одном или обоих КО. Заметим, что измеряемые моменты (М) в (2) целесообразно дополнить измерением натяжения внешнего участка ГС с целью повышения достоверности определения текущих параметров ГС что можно сделать установкой датчика натяжения ГС на следящее устройство 22 (на каждое из четырех таких устройств). Заметим также, что при записи (2) считается, что истинные натяжения внутренних участков ГС (от блоков 26 до приводов 20 фиг. 9) равны нулю. Фактически же такие натяжения несколько больше нуля и создают на валах двигателей противомоменты ΔM которые следует исключить из величин  измеренных блоками 21, т.е.
измеренных блоками 21, т.е. 
После того, как завершен режим ФН/ГС (т.е. ГС находится в допустимых границах вблизи ее идеально-невозмущенного состояния), переходят к отработке основного режима ГВ/ГС.
Задание на перемещение КО 1 вводится (35) в блоки 29 (фиг. 9), которые формируют волновой профиль радиальных смещений элементов ГС, порождающий необходимый профиль вариаций δ Т*(t) силы натяжения, результирующий импульс которой за время ее действия обеспечивает требуемые величину и скорость перемещения КО относительно его исходного положения в пространстве (фиг. 6). При необходимости перемещения КО также и из начальной плоскости X0Y0 блоки 29 одновременно формируют профиль нормальных (вдоль оси ±Z0; см. фиг. 5, 6) смещений элементов ГС d z(t), порождающих, совместно с вариациями силы натяжения d Т*(t), боковую составляющую этой силы (фиг. 5):
где  ( Φ угловая координата, отсчитываемая вдоль линии невозмущенной ГС, имеющей форму окружности радиуса r0). Заметим, что боковая компонента силы натяжения (3) является величиной "второго порядка малости" по отношению к величине d Т*.
( Φ угловая координата, отсчитываемая вдоль линии невозмущенной ГС, имеющей форму окружности радиуса r0). Заметим, что боковая компонента силы натяжения (3) является величиной "второго порядка малости" по отношению к величине d Т*.
После того, как блоком 29 сформирован необходимый волновой профиль, он аппроксимируется конечным набором гармоник в блоке 25, откуда через переключатель 24 низко и высокочастотные составляющие подаются, соответственно, к задатчикам 18 и 19, управляющим работой приводов трансформации 14, 15 штанг УПГВ.
Управление перемещениями КО 1 может производиться:
одной (3а) или двумя (3а, 3b) ветвями ГС (фиг. 1, 2); при направлении Vk согласно фиг. 1 активным генератором волн является выдающая ("верхняя") штанга УПГВ 4 на КО 2, а пассивным приемником волн (отслеживающим смещения ГС) служит приемная ("верхняя") штанга УПГВ 5 на управляемом КО 1; при том же направлении Vk активной мачтой может служить выдающая ("нижняя") мачта УПГВ 5 на КО 1, а пассивной приемная ("нижняя") мачта УПГВ 4 на КО 2.
при одновременном или поочередном активном задействовании ветвей 3а и 3b (фиг. 1): в первом случае на каждом КО одна из мачт работает в режиме генерации волн (переключатель 24 соединяет блок 25 с задатчиками 18, 19), а другая мачта в режиме отслеживания воспринимаемых смещений (переключатель 24' соединяет блок 23' с задатчиками 18', 19'; см. фиг. 9); во втором случае, во время активного действия одной из ветвей (например, 3а) другая ветвь (3b) остается в состоянии, близком к невозмущенному (соответствующие мачты неизменно зафиксированы на раме 8).
В режиме ГВ/ГС приводы 20 протяжки ГС поддерживаются блоками 21 при постоянных оборотах (n const), независимо от моментов М на валах двигателей (данные моменты следуют за изменением действующих на КО вариаций сил натяжения ГС).
Указанные вариации действуют на КО 1 как вследствие принимаемых им волн смещений (распространяющихся от КО 2), так и в результате генерируемых на самом КО 1 волн смещений (распространяющихся к КО 2), в виде чего и возможны отмеченные выше варианты управления.
Вариация натяжения ГС будут, разумеется, действовать и на КО 2 однако его массу мы будет считать гораздо большей массы КО 1, так что соответствующие возмущения движения КО 2 могут считаться несущественными (и/или легко парируемыми).
В режиме ГВ/ГС мачты 4,5 УПГВ перемещаются определенным образом относительно рам 8 (фиг. 3, 4), ввиду чего вариации силы натяжения d Т* проходят через различные точки КО, создавая моменты относительно центра масс КО. Чтобы уменьшить нежелательные изменения ориентации КО относительно его центра масс, следует так выбрать начальную установку мачт, чтобы интегральный (средний) момент от сил d Т* был равен нулю. Такой выбор может осуществляться блоком 29 с учетом синтеза сигнала в блоках 25 (по выбранным профилям сил и смещений см. фиг. 7, 8); начальная установка мачт производится блоком 29, через переключатель 33 и блок 28 посредством приводов трансформации 14, 15. Мгновенные и/или остаточные возмущения ориентации КО парируются средствами бортовой системы управления 31 (например, маховиками).
Описанный прием может быть использован как в случае генерирования только волн радиальных смещений (в плоскости X0Y0), так и при возбуждении волн с составляющими по оси Zo.
Для обоснования вышеописанного способа управления связанным КО воспользуемся уравнениями малых возмущений кругового контура динамической ГС, взятыми для случая Т*=0, т.е. при отсутствии внешних активных и инерционных сил, действующих на ГС. Эти уравнения, в соответствии с известной теорией (эффект Эткина-Радингера), допускают произвольные формы статических состояний ГС вблизи опорного кругового контура. Динамические же возмущения, как легко показать, представляют собой гармонические плоские волны радиальных смещений элементов ГС вида:
бегущие в направлении контурной скорости vo невозмущенной ГС с индивидуальными скоростями akV0 <V0, причем имеет место соотношение дисперсионного типа:
В (4) использовано безразмерное время τ ≡ 2V0t/r0, ввиду чего скорость k-ой волны составляет akV0 относительно бегущей ГС и 2akV0 относительно контура, неподвижного в инерциальных осях X0Y0.
Произвольные постоянные Ak, Bk должны выбираться при условии достаточной малости радиальных возмущений (4).
Составляющая возмущений вдоль оси Z0, как также следует из известных уравнений, представляет собой волну произвольной формы
также бегущую по направлению контурной скорости V0 но в точности с той же самой скоростью V0 (т.е. со скоростью 2V0 относительно неподвижного геометрического контура (ГС).
Таким образом, для получения требуемой нормальной составляющей силы натяжения (3) всегда можно подобрать подходящий вид волны (6), согласовав частотно-фазовые характеристики сигнала  с профилем δ Т*, составленным в виде суперпозиции волн, получаемых из (4).
с профилем δ Т*, составленным в виде суперпозиции волн, получаемых из (4).
Для определения необходимого набора гармонических волн (4) по заданному профилю d Т*, заметим, что в рассматриваемом случае приведенное общее выражение для вариаций натяжения сводится к следующему:
для каждой индивидуальной волны смешений (4). Т.о. синтезируя профиль силы натяжения в виде некоторого набора гармоник, сразу же получает для смещений  набор тех же гармоник, "промодулированных" коэффициентами ~a
набор тех же гармоник, "промодулированных" коэффициентами ~a
Если управление производится генерированием "уходящих" волн (в вышеописанном примере реализации изобретения с помощью мачты УПГВ на самом управляемом КО 1, см. фиг. 1 при активной ветви 3b), то синтез  осуществляется непосредственно, при фиксированном Φ которое для простоты можно принять равным vo 0.
осуществляется непосредственно, при фиксированном Φ которое для простоты можно принять равным vo 0.
В частности, можно выбрать ряд целочисленных частот из условия:
ak•k n, n 1, 2, 3.
и синтезировать подходящий вид профиля сигнала в форме "урезанного" ряда Фурье по гармоникам от τ, 2τ, 3τ... и т.д.
Заметим, что с ростом частоты волн (n, k → ∞ ) ak → 1, т.е. индивидуальные скорости всех волн стремятся к V0 (2V0 относительно контура), а эффективность управления в смысле
также возрастает.
Если управление производится путем приема "приходящих" (к КО 1) волн, генерируемых на удаленном объекте (на КО 2), то необходимо учитывать волновую дисперсию (5), деформирующую сигнал, синтезированный на управляющем объекте. Так по отношению к некоторой выделенной волне, распространяющейся с безразмерной скоростью a*, остальные волны при прохождении дугового расстояния Φк-Φo получат фазовые смещения
θк= (Φк-Φo)•(aк/a*-1). (10)
Генерируя в точке Φo (фиг. 3) сигналы с гармониками:
cosk(Φo-aкτ+θк); sink(Φo-aкτ+θк), (11)
получим в точке Φк (фиг. 4) сигналы с гармониками:
cosk(Φo-aкτ′); sink(Φo-aкτ′)- (12)
начиная с момента прихода τ*= (Φк-Φo)/a* в точку Φк выделенной волны и во все последующие моменты времени τ′≡ τ-τ*≥ 0 При Φo 0 все сигналы (12) синфазны, а генерируемые при Φ 0 (с момента t 0) сигналы (11) будут иметь фазовые смещение qк т.е. профиль генерируемого воздействия будет целенаправленно деформирован (фиг. 7, 8).
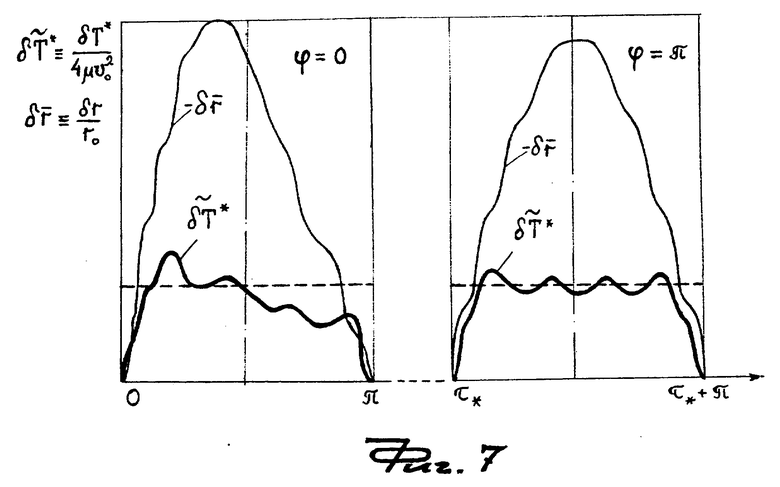
В качестве одного примера рассмотрим управление перемещением связанного КО 1 (фиг. 1 4) с борта базового КО 2. Положим Φo= 0, Φк= π а идеальный профиль силового воздействия на КО 1 примем в виде "широкого импульса" длительностью Δτ′= π Аппроксимирует этот профиль первыми семью нечетными гармониками ряда Фурье:
а в качестве выделенной волны возьмем наиболее медленную: a*=a1 0,56. Скорости остальных волн таковы: a3≈ 0,86; a5 ≈ 0,93; a7≈ 0,96. Отсюда, временной закон смещений элементов ГС в районе КО 1 (фиг. 4) таков:
откуда, в частности, видно, что первая гармоника (a1k1=1) дает большие потребные амплитуды смещений (коэфф. 3, 2), и эффективность (9) управления по этой гармонике невысока около 32% в то время как эффективность по 3-ей, 5-ой и 7-ой гармоникам составляет 74% 86% и 89%
Для получения сигнала (13) в точке Φ = Φк в точке Φ 0 (на КО 2) должны генерироваться смещения:
и соответствующие им вариации силы натяжения ГС. Временные профили тех и других (фиг. 7) являются деформированными, однако не в столь значительной мере.
Нетрудно оценить и величину получаемой вариации силы натяжения ГС. Например, если допустимы максимальные радиальные смещения  0,03 (т.е. около 15 м при расстоянии между КО 2 и КО 1, равном 1 км), то сила δT* ≈ 0,04μv
0,03 (т.е. около 15 м при расстоянии между КО 2 и КО 1, равном 1 км), то сила δT* ≈ 0,04μv
Приведенный пример далекий от оптимального обладает тем недостатком, что скорости смещений  в начальный и конечный моменты времени весьма велики (и неограниченно растут при k → ∞ ), что связано с "импульсным" характером идеального профиля силы натяжения. Однако нет необходимости выбирать именно такие профили.
в начальный и конечный моменты времени весьма велики (и неограниченно растут при k → ∞ ), что связано с "импульсным" характером идеального профиля силы натяжения. Однако нет необходимости выбирать именно такие профили.
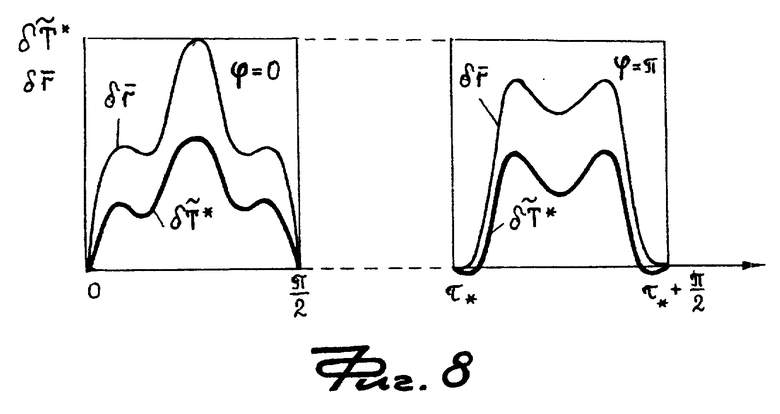
Во втором примере управления, при тех же прочих условиях, зададим исходный профиль вариаций силы натяжения на базе гладкой функции времени:
которая обращается (вместе с производными) в нуль в начале ( τ0) и конце t = π/p управления; p делитель K и N (одинаковой четности).
Такая простая функция позволяет обеспечить гладкость до второго порядка (по временной переменной) по крайней мере на одном конце управляющей ветви ГС (например, у КО 1). В этом можно убедиться, выбирая профиль смешений, в частности, в виде:
где:
a*= a2= 0,752; a10=0,981 (a2k2=2, a10k10=10). Заметим, что здесь эффективно управления (9) уже составляет около 56% В районе КО 1 ( Φ = π ) радиальные смещения и вариации силы натяжения ГС будут таковы:
Очевидно, что вмещения в (16) обращаются в нуль, вместе в первой и второй производными по τ′ на концах временного промежутка (0, π /2), при этом вариации натяжения d T* имеют небольшие участки весьма малых отрицательных значений (фиг. 8, справа). При генерации волн на КО 2 (фиг. 8, слева) гладкость функций нарушается, однако скорости изменения смещений существенно ниже, чем в первом примере (фиг. 7).
Небольшим усложнением спектра сигнала можно добиться гладкости (хотя бы до первого порядка) функций смещений на обоих концах управляющей ветви ГС.
Таким образом, способ согласно предлагаемому изобретению может быть реализован на базе существующих технических средств и технологий, позволяя достичь указанного выше технического результата. Возможны различные частные варианты осуществления способа, а также многообразные конструктивные средства для этой цели в рамках сущности изобретения, изложенной в нижеприводимой формуле.


Изобретение относится к средствам управления движением космических объектов в слабом внешнем поле активных и инерционных сил. Сущность изобретения состоит в том, что между связанными космическими объектами (КО) 1, 2 формируют линию невозмущенной гибкой связи в форме дуг 3а, 3b окружностей, вдоль которой связи придают контурное движение со скоростью Vk, после чего с помощью устройств 4, 5 возбуждают на одном из КО поперечные волны смещений элементов гибкой связи, распространяющиеся вдоль связи в направлении скорости Vk к другому КО. Волны смещений порождают вариации натяжения гибкой связи, действием которых и управляется КО, воспринимающий данные волны. Устройства 4, 5 могут представлять собой многозвенные ферменные мачты с трансформируемыми звеньями, причем приводы трансформации звеньев связаны со средствами управления так, что многостепенные перемещения элементов мачт вызывают генерацию волн на одном КО и, в следящем режиме, - восприятие волн на другом КО. 7 з.п. ф-лы, 10 ил.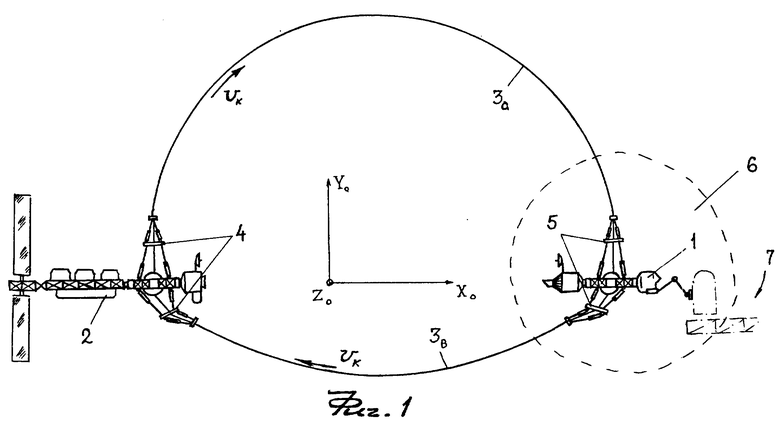
| Итоги науки и техники | |||
| Серия "Ракетостроение и космическая техника", т.12.- М., 1991, с.10-12. |
