Изобретение относится к способам и средствам управления, преимущественно, космическими объектами (КО) и может быть использовано при организации функционирования КО, соединенных друг с другом гибкой связью (ГС) с регулируемыми длиной и /или скоростью движения вдоль своего контура.
Известны способы управления связанными КО, включающие соединение КО рабочим участком ГС, регулирование баллистических параметров этого участка (натяжения, длины, формы контура, скорости контурного движения), образование запаса ГС на одном КО и ее расход с борта другого КО. Известны и соответствующие устройства, содержащие бортовую систему управления, объединенные с ней средства регулирования балластических параметров рабочего участка ГС, а также средства перевода ГС в состояние хранения на борту КО и ее выдачи из образуемого на борту КО запаса.
Используемый для управления КО режим контурного движения ГС дает существенные преимущества по сравнению с обычным применением с этой целью "неподвижной вдоль себя" ГС. Однако при этом возникают трудности с переводом быстродвижущейся ГС в состояние хранения и обратно. Соответствующие конструктивные средства (емкости хранения, скоростные укладчики-раздатчики ГС) могут иметь значительные массу и габариты.
Наиболее близким к предлагаемому техническому решению является способ управления объектами с помощью ГС, включающий соединение объектов рабочим участком ГС из материала в твердофазном состоянии (в виде прочной нити или ленты), образование запаса материала в вязкотекучем состоянии (в виде расплава или раствора полимера) на по меньшей мере одном из объектов, придание рабочему участку ГС движения относительно этого объекта с одновременным формированием рабочего участка ГС из ее запаса (экструзией нити из расплава полимера и т.п.), регулирование балластических параметров рабочего участка ГС в зависимости от заданных и текущих параметров движения по меньшей мере одного из объектов (скорости и удаления привязного КО относительно орбитальной станции).
Реализующее данный способ устройство содержит взаимодействующий с системой обеспечения функционирования по меньшей мере одного из объектов (в данном случае - с системой обеспечения спуска капсул, удаляемых с борта орбитальной станции) блок задания и индикации параметров относительного движения объектов, объединение с этим блоком управляющими каналами средства регулирования баллистических параметров рабочего участка ГС между объектами, средства образования и поддержания запаса ГС в вязкотекучем состоянии (т.е. некоторая герметичная емкость с системой термостатирования, дегазации и перемешивания расплава или раствора полимера) и средство формирования рабочего участка ГС в виде приспособления экструзионного типа (системы вытеснения содержимого герметичной емкости, фильерного блока, роликов протяжки отверждаемой нити и т.п.) с вспомогательными элементами для стабилизации физико-механических характеристик (ФМХ) формируемого участка ГС (регуляторами температуры, степени вытяжки, поверхностной адгезии и т.д.).
Недостатками известных способа и устройства являются ограниченные возможности и невысокая гибкость управления связанными объектами, что обусловлено неизменностью ФМХ (сечения, погонной массы, электропроводности и т.д.) вдоль рабочего участка ГС, не позволяющей оперативно варьировать свойства ГС в соответствии с изменяющимися задачами управления;
применением фазопереходного метода при расходе ГС на ее запаса лишь на одном из связанных КО, не дающим возможности многократного использования ГС при управлении связкой КО и ограничивающим целевой массообмен между КО (когда в качестве ГС выступают транспортируемые материалы).
Целью изобретения является расширение возможностей и повышение гибкости управления.
Это достигается тем, что в способе управления объектами с помощью гибкой связи, включающем соединение объектов рабочим участком гибкой связи из материала в твердофазном состоянии, образование запаса гибкой связи из материала в вязкотекучем состоянии на по меньшей мере, одном из объектов, придание рабочему участку гибкой связи движения относительно этого объекта с одновременным формированием рабочего участка гибкой связи из ее запаса, регулирование баллистических параметров рабочего участка гибкой связи в зависимости от заданных и текущих параметров движения по меньшей мере одного из объектов, в процессе регулирования баллистических параметров рабочего участка гибкой связи локально изменяют физико-механические характеристики этого участка.
При этом в одном из вариантов способа изменяют профиль поперечного сечения рабочего участка гибкой связи.
В другом варианте (или одновременно с первым) изменяют поверхностные характеристики рабочего участка гибкой связи.
В третьем варианте (или одновременно с первыми двумя) изменяют материал рабочего участка гибкой связи.
Кроме того, рабочему участку гибкой связи может быть придано движение относительно обоих объектов с образованием ее запаса на каждом из объектов, причем при приеме рабочего участка гибкой связи на борт объекта ее запас на этом объекте образуют путем перевода материала гибкой связи из твердофазного в вязкотекучее состояние.
Цель изобретения достигается также тем, что устройство для управления объектами с помощью гибкой связи, содержащее взаимодействующий с системой обеспечения функционирования по меньшей мере одного из объектов блок задания и индикации параметров относительного движения объектов, связанные с ним информационно-управляющими каналами средства регулирования баллистических параметров рабочего участка гибкой связи между объектами, средства образования и поддержания запаса гибкой связи в вязкотекучем состоянии и средство формирования рабочего участка гибкой связи из ее запаса в виде приспособления экструзионного типа с вспомогательными элементами для стабилизации физико-механических характеристик формируемого участка гибкой связи, снабжено по меньшей мере одним средством для локального изменения физико-механических характеристик рабочего участка гибкой связи, взаимодействующим со средствами формирования этого участка и связанными информационно-управляющими каналами с системой обеспечения функционирования объекта.
При этом средство для локального изменения физико-механических характеристик рабочего участка гибкой связи может быть выполнено в виде элемента для изменения профиля поперечного сечения рабочего участка гибкой связи, размещенного в месте формирования этого участка из запаса гибко связи и взаимодействующего с системой обеспечения функционирования объектов через блок задания и индикации параметров относительного движения объектов.
Кроме того, средство для локального изменения характеристик рабочего участка гибкой связи может быть выполнено в виде элемента для нанесения покpытия на рабочий участок гибкой связи.
Наряду с вышеуказанными вариантами исполнения средство для локального изменения физико-механических характеристик рабочего участка гибкой связи может быть выполнено в виде смесительно-модификационной камеры, сообщенной со средством формирования рабочего участка гибкой связи, и элементов для дозированной подачи в эту камеру частей запаса гибкой связи, причем средство поддержания запаса гибкой связи в вязкотекучем состоянии выполнено в виде нескольких изолированных термостабилизированных емкостей для хранения указанных частей запаса, снабженных элементами для их выдачи из емкостей.
Наконец, предлагаемое устройство может быть снабжено размещенным по меньшей мере на одном из объектов средством перевода материала гибкой связи из твердофазного в вязкотекучее состояние, гидравлически сообщенным со средствами поддержания запаса гибкой связи в вязкотекучем состоянии.
Отдельные частные технические приемы, касающиеся изменения ФМХ нитей или лент, известны как в области технологии синтетических волокон, так и в космической технологии.
На фиг. 1 представлена общая схема управления связанными КО; на фиг. 2 - функциональная схема взаимодействия основных компонентов предлагаемого устройства; на фиг. 3 - один из возможных вариантов исполнения приспособления для перевода ГС из твердофазного в вязкотекучее состояние; на фиг. 4 - вариант исполнения средств для локализованного изменения ФМХ формируемого участка ГС; на фиг. 5 - один из практически возможных вариантов реализации предлагаемого способа.
Управление относительным движением объектов, в частности КО 1 и КО 2 (фиг.1), осуществляется с помощью рабочего участка 3 ГС, баллистические параметры которого (длина, кривизна контура, натяжение, контурная скорость) регулируются с помощью подвижной направляющей головки 4 и привода 5 скоростной протяжки ГС. Данные средства регулирования, снабженные соответствующими датчиками, функционально связаны с блоком 6 задания и индикации параметров относительного движения КО 1 и 2 (радиолокационного, визуального или иного типа).
Запас ГС на борту, например, КО 1 поддерживается в вязкотекучем состоянии в (термостатируемой и герметичной) емкости 7, снабженной средством 8 вытеснения жидкой фазы через регулируемый фильерный узел 9, за которым расположен блок 10 вспомогательных элементов для охлаждения, упрочняющей вытяжки и предварительной поверхностной обработки формируемой ГС (данные элементы подобны используемым в производстве волокон). Далее следует участок II нанесения покрытия на поверхность ГС, в зависимости от материала ГС и его поверхностных свойств это может быть распылительная (для адгезионного нанесения покрытия), плазменная или иная головка (блок последовательно расположенных головок).
На этом же (КО 1) и/или другом (КО 2) объекте предусмотрено приспособление для перевода ГС из твердофазного в вязкотекучее состояние. Оно содержит собственно преобразователь фазового состояния (ПФС) 12, термостатируемого емкость 13, насосный узел 14 и управляемые краны 15, 16 в магистралях гидравлической связи емкости 13 с насосом 14 и насоса 14 с емкостью 7.
Для "замыкания" вышеописанной фазопреобразующей цепи предусмотрен распределительно-направляющий механизм 17 (типа челнока), подающий ГС в зависимости от режима функционирования либо от участка 11 к приводу 5, либо от привода 5 к входу ПФС 12 (последний подробнее показан на фиг. 3). Механизм 17 снабжен резаком (не показан) для отсечения рабочего участка ГС от неиспользуемой в данном режиме части фазопреобразующей цепи: при приеме ГС - от участка формирования ГС, проходящего через элементы 9, 10, 11, при выдаче ГС - от участка с элементами 12, 13, 14. При каждой выдаче ГС, следующей за ее приемом, требуется соединять уже имеющийся и вновь формируемый элементами 9, 10, 11 рабочие участки ГС - это можно осуществлять "вручную" либо специальным робототехническим устройством на борту КО.
В случае, если для управления КО 1 и 2 используются не один, а два контура со встречным движением ГС (с одного контура ГС принимается, а на другой выдается), то вместо механизма 17 (с резаком) на КО установлены дополнительные привод 5 и головка 4, причем с одного из приводов 5 ГС поступает в ПФС 12, а на другой привод 5 подается с участка формирования (9,10,11).
На борту КО 1 могут быть предусмотрены убираемые контактные элементы 18, связанные, например, с бортовой радиосистемой (они действуют, когда ГС имеет электропроводящее покрытие и используется как антенна).
Очевидно, что указанные средства могут быть размещены как только на одном (КО 1), так и на обоих объектах - в последнем случае работа всех этих средств синхронизируется взаимодействующими друг с другом блоками 6 на обоих КО (при их контроле системой обеспечения функционирования КО).
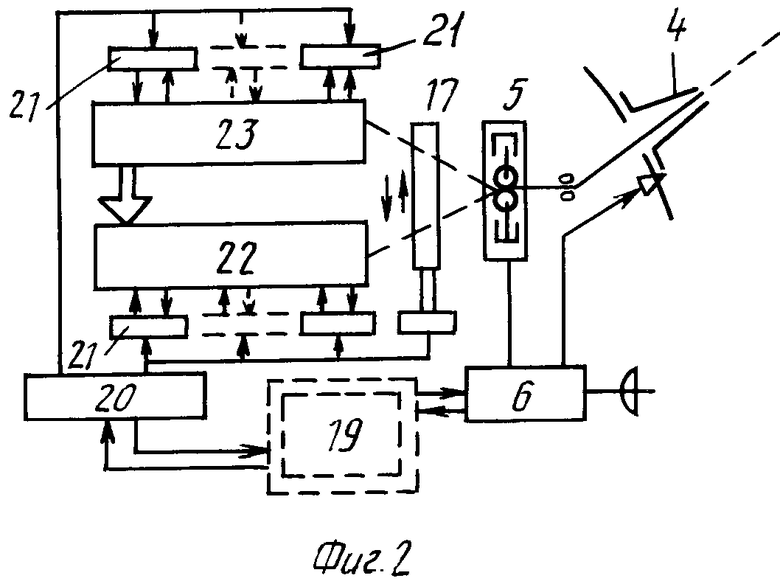
Управление работой предлагаемого устройства на верхнем уровне производится системой 19 (бортовой или внешней) обеспечивая функционирования КО, которая взаимодействует по каналам прямой и обратной связи с блоком (блоками) 6 и средствами регулирования 5,4 параметров рабочего участка ГС (фиг. 2). С системой 19 также взаимодействуют (непосредственно или - через блок 6) устройство 20 для обработки и распределения командно-информационных данных (сигналов), которое в свою очередь объединено каналами прямой и обратной связи с переходными управляющими элементами 21 ("индивидуальными процессорами"), выполняющими функции информационно-логического сопряжения устройства 20 с цепями 22 (комплексом элементов 8-7-9-10-11) и 23 (комплексом элементов 12-13-15-14-16), соответственно формирования рабочего участка ГС и его перевода в вязкотекучее состояние (фиг.1).
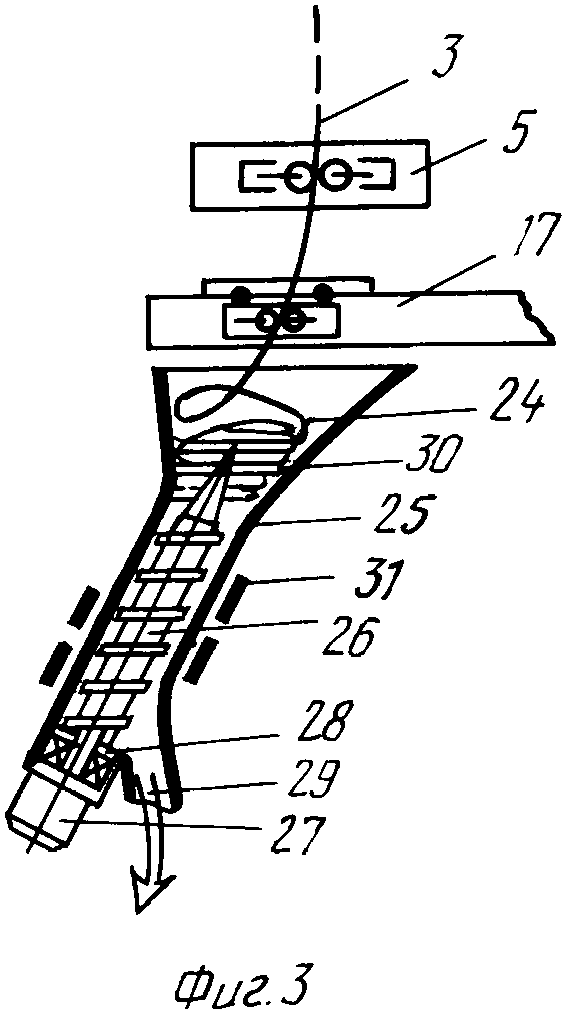
На фиг. 3 показана возможная конструктивная схема ПФС 12. ПФС экструдерного типа содержит воронку-приемник 24 рабочего участка ГС, сопряженную с камерой 25, внутри которой размещен шнек 26, снабженный приводом 27, передающим вращение этому шнеку через уплотнительный узел 28 шнекового вала. Выходные патрубки 29 сообщены (непосредственно или через затворы) с термостатируемой емкостью 13 (фиг.1). Направление вращения шнека 26 соответствует "втягиванию" массы 30 ГС, подаваемой в воронку 24 через направляющий механизм 17 внутрь камеры 25 ("схема мясорубки" подобна известной). Камера 25, при необходимости может быть снабжена подогревателем 31 ожижаемой массы ГС.
В случае, когда в качестве ГС используется металлическая проволока или лента, вместо экструдера может быть применен просто плавильный агрегат, а в качестве гидротранспортирующих средств (вместо шнека 26 и насоса 14) - электромагнитные насосы.
Питание подогревательных и других элементов предлагаемого устройства осуществляется от бортовых источников КО (солнечных батарей, топливных элементов и т.д.).
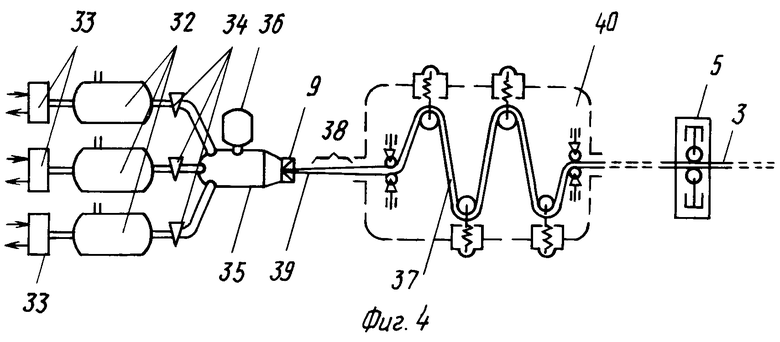
Для изменения материала рабочего участка ГС могут быть предусмотрены несколько емкостей 32 с системами вытеснения 33 (фиг. 4), аналогичных емкости 7 с системой 8 на фиг. 1. При необходимости емкости 32 сообщаются через перекрывные элементы типа элемента 16 (фиг.1) и магистрали с соответствующими участками приема-преобразования ГС (линиями ПФС). Емкости 32 через управляемые затворы (клапаны) 34 сообщены со смесительной камерой 35 фильерного блока 9, которая может быть снабжена средством 36 для дозированного ввода в камеру 35 различных химических добавок (адгезивов, сополимеризаторов и др.), обеспечивающих надежное соединение друг с другом участков ГС 37 и 39 из разных материалов (38 - переходная зона между этими участками). Возможны и иные типы приспособлений для формирования и последующего соединения различных участков ГС (подобные средства достаточно хорошо известны из текстильной практики).
За фильерным блоком 9 размещен участок 40 для стабилизации ФМХ формируемой ГС. Здесь осуществляется (если это необходимо помимо средств 4 и 5) вытяжка ГС, ее охлаждение, а также конечный контроль профиля сечения ГС. Если свойства и структура материала ГС допускают вакуумирование сразу за фильерой, то не требуется герметизация участка 40 - в противном случае используется емкость, заполняемая, например, инертным газом. В этом случае конструкция усложняется за счет специальных (например, магнитожидкостных) уплотнений в местах ввода ГС в емкость и вывода из нее. За участком располагаются средства обработки поверхности ГС и нанесения покрытия.
Реализация заявляемого способа и соответственно работа предлагаемого устройства осуществляются следующим образом.
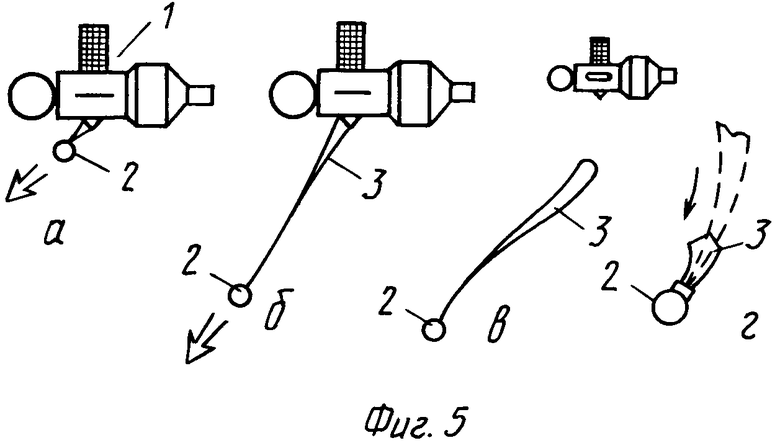
Формируемая средствами 8,7,9,10 на КО 1 (фиг.1) ГС 3 протягивается с заданным (регулируемым) натяжением через привод 5 и выдается через головку 4 под заданным (регулируемым) углом запуска. Другой конец ГС либо зафиксирован относительно КО 2 (случай разведения, показанный на фиг. 5), либо принимается на его борт через элементы 17, 12, 13 (фиг.1). В последнем случае происходит при посредстве ПФС 12 накопление ГС на борту КО 2 в вязкотекучем состоянии (в емкостях типа 13 и 7).
Эффективное использование ГС для управления относительным движением КО 1 и 2 требует изменения МФХ рабочего участка ГС. Согласно фиг.5 равнопрочная ГС 3 (например, лента) должна меняться в сечении по своей длине. Для этого по информации блока 6 о длине рабочего участка ГС устройством 20 (фиг. 2) формируется команда на изменение сечения фильеры 9 (фиг.1) в преобразованном элементом 21 виде, подаваемая на привод фильеры.
Изменение погонной массы ГС (площади сечения и/или плотности материала нити) может понадобиться и в других случаях управления, например, при замедлении скорости контурного движения (фиг. 1), но сохранении при этом требуемого натяжения и кривизны контура ГС. Это изменение производится аналогично по директивной информации системы 10, с использованием данных блока 6, согласующего преобразователя 20 и т.д.
Периодически может возникать необходимость в передаче данных через ГС как антенну - в такие периоды функционирования связки КО на формируемую ГС наносится электропроводящее покрытие с помощью напылительных головок участка 11 (фиг. 1), а убирающиеся контакты 18 (на одном или обоих КО) вводятся во взаимодействие с ГС, возбуждая в ней необходимые токи. По прекращении сеанса радиосвязи покрытие перестает наноситься на ГС, расплавляемый же при приеме участок ГС с покрытием может быть подвергнут физико-химической сепарации, чтобы отделить металл покрытия от, например, синтетического вещества нити. С помощью средств, показанных на фиг.4, ГС может быть сделана (временно) электропроводной путем формирования целиком проводящего рабочего участка ГС (например, 39), внедренного между диэлектрическими концами ГС.
Изменение оптических свойств покрытия ГС (As/ε ) может производиться аналогично вышеописанному, например, с целью стабилизации тепловых нагрузок на ГС при переходах с теневой на солнечную сторону при движении КО по орбите.
Изменение материала рабочего участка ГС, обеспечиваемое (по командам системы 19 и устройства 20 через переходные элементы 38) закрытием одних и открытием других управляемых затворов 34 (фиг.4), а также подачей в смесительную камеру 35 необходимых добавок дозатором 36, может понадобиться не только для модификации процесса управления связкой КО, но также и для транспортировки тех или иных веществ с одного КО на другой (например, при реализации некоторых космических технологий, когда разные вещества изготавливаются в разных КО "цехах").
Возможны и другие (комплексные) применения заявленных способа и устройства в самых разных космических операциях. При этом важно отметить "синерничность" достигаемых результатов, как это видно, в частности, из простого примера спуска КО 2 с борта КО 1 по фиг. 5. Здесь формируемая ГС (лента) 3 получается не только равнопрочной, но и более эффективной в отношении восприятия сопротивления верхней атмосферы (миделева площадь ленты по высоте от поверхности Земли, т.е. больше там, где меньше плотность воздуха). Кроме того, относительно большая поверхность ленты 3 может использоваться (в процессе спуска к условной границе атмосферы 100-200 км) как микрометеоритный (и иной) зонд, если эту ленту затем втянуть на борт КО 2 (фаза "г" на фиг.5), то можно получить и соответствующую информацию. Лента может быть и просто отделена от КО 2 (с последующим наблюдением за ее движением).
Технико-экономическая эффективность предлагаемых способа и устройства состоит в разработке - на базе достаточно хорошо известных и апробированных конструктивных элементов и технологических приемов - комплексных средств управления движением объектов (преимущественно, в космических условиях), которые помимо более гибкого и эффективного управления, дают возможность попутного решения многих других задач функционирования объектов в космосе. Кроме того, от реализации предложения следует ожидать получения существенной научно-технической информации и физико-технологических процессах в космосе и работе там новых типов космических систем. Тем самым имеются достаточные основания ожидать значительного полезного выхода на единицу затрат материальных и интеллектуальных ресурсов.
Изобретение относится к способам и средствам управления, преимущественно, космическими объектами и может быть использовано при организации функционирования космических объектов, соединенных друг с другом гибкой связью с регулируемой длиной и/или скоростью движения вдоль своего контура. Цель изобретения: расширение возможностей и повышение гибкости управления, в процессе регулирования баллистических параметров рабочего участка гибкой связи локально изменяют физико-механические характеристики этого участка, изменяют профиль поперечного сечения рабочего участка гибкой связи, поверхностные характеристики рабочего участка гибкой связи, материал рабочего участка гибкой связи, рабочему участку гибкой связи придают движение относительно обоих объектов, образуя ее запас на каждом из объектов. при этом при приеме рабочего участка гибкой связи на борт объекта ее запас на этом объекте образуют путем перевода материала гибкой связи из твердофазного в вязкотекучее состоянии. Устройство снабжено по меньшей мере одним средством для локального изменения физико-механических характеристик рабочего участка гибкой связи, взаимодействующим со средствами 4,5 формирования этого участка и связанными информационно-управляющими каналами с системой обеспечения функционирования объекта. Средство для локального изменения физико-механических характеристик выполнено в виде элемента 9 для изменения профиля поперечного сечения рабочего участка гибкой связи, размещенного в месте формирования этого участка из запаса гибкой связи и взаимодействующего с системой обеспечения функционирования объектов через блок 6 задания и индикации параметров относительного движения объектов, или элемента 11 для нанесения покрытия на рабочий участок гибкой связи, или смесительно-модификационной камеры, сообщенной со средством 4,5 формирования рабочего участка гибкой связи, и элементов для дозирования подачи в эту камеру частей запаса гибкой связи, причем средство поддержания запаса гибкой связи в вязкотекучем состоянии выполнено в виде нескольких изолированных термостабилизированных емкостей для хранения указанных частей запаса, снабженных элементами для их выдачи из емкостей. Устройство снабжено размещенными по меньшей мере на одном из объектов средством 12 перевода материала гибкой связи из твердофазного в вязкотекучее состояние, гидравлически сообщенным со средствами поддержания запаса гибкой связи в вязкотекучем состоянии. 2 с. и 8 з.п. ф-лы, 5 ил.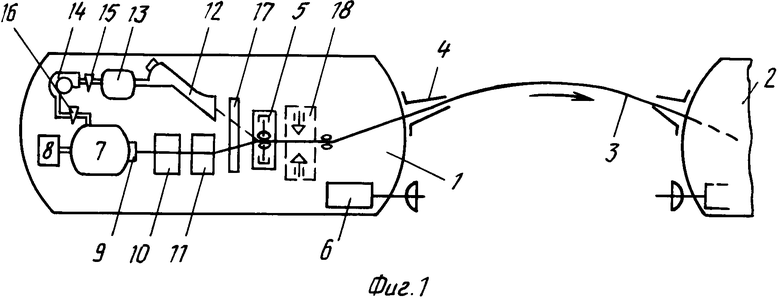
| Итоги науки и техники | |||
| Ракетостроение и космическая техника, т.12, М, ВИНИТИ, 1991, с.118. |
