Изобретение относится к автоматизированному электроприводу, в частности к регулируемому электроприводу постоянного тока с широтно-импульсным управлением, и может быть использовано в оптико-механических системах летательных аппаратов, в системах наведения радиолокаторов, радиотелескопов, антенн радиокомплексов, в различных промышленных установках, например в станках с ЧПУ, роботах и манипуляторах.
Известны электроприводы постоянного тока, содержащие широтно-импульсные модуляторы (ШИМ) и усилители мощности, работающие в режиме класса Д.
Указанные электроприводы по способу задания управляющего сигнала делятся на аналоговые и цифровые, в которых средняя скорость двигателя устанавливается пропорционально управляющему воздействию. Для аналоговых электроприводов таким воздействием является уровень напряжения управления, а для цифровых цифровой код управления.
Достичь высокой точности и плавности регулирования скорости электропривода постоянного тока во всем диапазоне регулирования скоростей при помощи аналогового управляющего воздействия и аналоговой системы схемы формирования управляющих импульсов напряжения не представляется возможным.
Это объясняется:
во-первых, тем, что при требовании получения большого диапазона регулирования скорости при заданных параметрах нестабильности вращения трудно, а порой и невозможно получить малые управляющие сигналы. Управляющие сигналы задаются потенциометрическими регуляторами, в качестве которых применяются проволочные и пленочные потенциометры. При использовании проволочных потенциометров минимально возможное напряжение управления ограничено шагом намотки потенциометра. Количество витков обмотки потенциометра определяется габаритами самого потенциометра и лежит в пределах 500.2000 витков, тем самым количество реализуемых ступеней управляющего напряжения ограничивается числом витков потенциометра. Упавляющее напряжение при управлении от задающего потенциометра изменяется дискретно при вращении щетки потенциометра и невозможно задать промежуточые значения управляющего сигнала при переходе щетки потенциометра от одного витка к соседнему. Малое количество ступеней управляющего напряжения приводит к низкой плавности регулирования двигателя. При использовании пленочных потенциометров, также как и проволочных, в цепи управления возникают сильные помехи, вызываемые наличием механического контакта между движком потенциометра и рабочим органом (проволочная обомотка или пленочный слой потенциометра), что также приводит к снижению точности регулирования);
во-вторых, тем, аналоговые элементы (операционные усилители и транзисторы, работающие в линейных режимах), применяемые в схеме управления и в ШИМ аналоговых электроприводов, обладают нестабильными параметрами в зависимости от температуры и питающего схему управления напряжения. Это приводит к тому, что даже при точном задании уровня управляющего напряжения (например, от цифрового задающего устройства с использованием цифро-аналогового преобразователя) скорость электродвигателя не остается постоянной, а "плавает" в каких-то пределах, снижая точность регулирования. Так например, для широко известных комплектных электроприводов типа ТПЭР, ПКВТ, ПТР отклонение скорости при изменении напряжения от 0,1 Uн до 1,1 Uн составляет ±5% а при изменении температуры ±10% Особенность регулятора скорости состоит в том, что он должен иметь малый дрейф выходного напряжения, так как этот параметр определяет стабильность нижней скорости двигателя. Электроприводы промышленных роботов типа ЭТЗИ, ЭШИМ, ЭШИР также управляются с помощью различных регуляторов, построенных на аналоговых операционных усилителях. Однако, аналоговый метод обработки информации, применяемый в системе управления электропривода, не позволяет точно воспроизвести программу, поступающую от ЧПУ. Применение в аналоговых схемах управления устройств стабилизации параметров, влияющих на скорость двигателя, приводит к значительным, порой неоправданным, усложнениям схемы.
Электроприводы с цифровым управлением и цифровым преобразованием задающего воздействия обладают более высокой точностью и плавностью регулирования скорости по сравнению с аналоговыми электроприводами. Системы с цифровым регулированием скорости позволяют обеспечить большие диапазоны регулирования при высокой статической точности, составляющей 0,01.0,001%
Однако точность регулирования скорости цифровых электроприводов постоянного тока явно недостаточна. Это объясняется следующим. При снижении скорости двигателя, начиная с некоторого ее значения (при скоростях менее 10 об/мин) возрастают колебания момента статического сопротивления Мс.Рост колебаний момента Мс связан с тем, что начинает сказываться задев краев щеток и коллекторных пластин (особенно при значительном их износе), возрастает коэффициент трения в редукторе, подшипниках, в узлах трения исполнительного органа, опорах, муфтах сцепления и др. Колебания момента Мс носят нестационарный характер с периодическим и случайным изменением его составляющих. Периодические составляющие момента Мс вызываются трением щеток о коллектор (коллекторные пульсации момента потерь двигателя), несоосностью вала двигателя, валов редуктора и вала исполнительного органа, изменением передаточного числа редуктора в связи с перемещением точек зацепления вдоль линии зацепления (наибольшее влияние на эти колебания оказывает первая пара зацепления со стороны вала двигателя) если муфты, связывающие валы являются полужесткими, то упругая деформация их элементов вызывает периодические составляющие колебания моментов. Случайные составляющие момента Мс возникают, например, вследствие загрязнения смазки подшипников и зацепления редуктора, упругих деформаций валов и звеньев редукто- ра, ударов зубьев редуктора, связанные с люфтами в редукторе. В области регулирования малых (менее 10 об/мин) скоростей электропривода момент Мсстановится соизмеримым с электромагнитным моментом М двигателя и возрастают колебания скорости электропривода, а при более низких скоростях (менее 1 об/мин) момент М, развиваемый двигателем может стать меньше момента Мс и двигатель останавливается.
Таким образом, недостатками аналогов являются низкая точность и плавность регулирования скорости.
Наиболее близким по технической сущности к предлагаемому электроприводу является схема управления двигателем постоянного тока с широтно-импульсной модуляцией сигнала [1] В этом устройстве питание двигателя осуществляется от мостового усилителя мощности с четырьмя транзисторными ключами и обратными диодами. Ключи управляются при помощи широтно-импульсной модуляции с симметричным или несимметричным законами коммутации. Схема управления содержит два широтно-импульсных модулятора, каждый из которых построен на базе компаратора. На инвертирующий вход первого и неинвертирующий вход второго компаратора подается сумма двух напряжений: управляющего и пилообразного. Пилообразное напряжение вырабатывается генератором сигнала треугольной формы. Частота этого сигнала определяет рабочую частоту ШИМ. Управляющее напряжение подается от задающего устройства, например, потенциометра. На вторые входы компараторов подается нулевой опорный сигнал. Импульсы напряжения с выходов каждого компаратора поступают на триггерную схему, выполненную на элементах И-НЕ, выходы которой подключены к двум линиям задержек. Время задержки каждой линии выбрано большим длительности импульсов напряжения на выходах компараторов, когда управляющее напряжение равно нулю. Выходы линий задержек соединены со входами элементов И, ко вторым входам которых поданы напряжения с компараторов. Таким образом, на входы каждого элемента И подаются незадержанный и задержанный сигналы. Выходы этих элементов подключены к двум транзисторным ключам один электрод которых подключен к плюсовой шине источника питания. Другая пара ключей управляется напряжениями с выходов элементов И-НЕ. От выбора длительности задержки зависит закон коммутации ключей. При длительности задержки, несколько большей половины периода импульсов возможен несимметричный закон коммутации. При времени задержки, несколько меньшей периода импульсов, возможен симметричный закон коммутации ключей. На выходах элементов И появляются импульсы напряжения лишь в случае совпадения импульсов на обоих входах. Поэтому они оказываются по длительности короче аналоговых импульсов напряжения на выходах элементов И-НЕ, что обуславливает отсутствие сквозных токов через транзисторные ключи в момент их коммутации.
Рассмотрим работу схемы при симметричном законе коммутации. При нулевом управляющем сигнале на выходах компараторов образуются импульсы напряжений одинаковой длительности с фазовым сдвигом 180 градусов, которые поступают на входы элементов И. На вторые входы этих элементов поступают аналогичные импульсы, но с задержкой во времени. Импульсы напряжения одинаковой длительности с выходов элементов и поступают на ключи, один электрод которых соединен с плюсовой шиной источника питания, мостового усилителя мощности. На другую пару ключей поступают импульсы напряжений также одинаковой длительности с выходов элементов И-НЕ. Поэтому на зажимах якоря двигателя появляются разнополярные импульсы напряжения одинаковой длительности, среднее значение которых равно нулю. При появлении управляющего напряжения, оличного от нуля, на выходах компараторов образуются импульсы напряжений разной длительности, что вызывает появление на зажимах якоря среднего значения напряжения отличного от нуля и вращение двигателя. По сравнению с аналогами эта схема обладает большими функциональными возможностями, что и обусловило выбор ее в качестве прототипа.
Изобретение решает задачу разработки электропривода с высокой точностью и плавностью регулирования скорости.
Для решения поставленной задачи в цифровой электропривод постоянного тока с двойной широтно-импульсной модуляцией, содержащей электродвигатель, включенный в одну диагональ моста, образованного транзисторными ключами, вторая диагональ моста подключена к шинам питания, высокочастотный генератор, подключенный к первому входу формирователя импульсов управления, выходы которого, прямой и инверсный через элементы И-НЕ, линии задержки и элементы И соединены с управляющими входами двух транзисторных ключей, управляющие входы двух других транзисторных ключей соединены с выходами элементов И-НЕ и вторыми входами противоположных элементов И-НЕ, первые входы которых соединены с вторыми входами противоположных элементов И, введены блок цифрового задания скорости преобразователь кода, коммутатор кодов и низкочастотный генератор, при этом выходы блока цифрового задания скорости соединены с первыми входами коммутатора и через преобразователь кода с вторыми входами коммутатора, к входу управления коммутатора подключен низкочастотный генератор, выходы коммутатора подключены к вторым входам формирователя импульсов управления, транзисторные ключи шунтированы обратными диодами.
Сущность изобретения заключается в следующем.
Точность регулирования скорости определяется возможными отклонениями ее от заданного значения под действием возмущающих факторов, например изменений управляющего сигнала, напряжения питания усилителя мощности, температуры окружающей среды при регулировании скорости. Оценкой точности регулирования может служить отношение наибольшего отклонения скорости Δωмакс к среднему значению ωср:
δω Δωмакс/ ω ср.
Величиной, определяющей среднюю скорость двигателя ωср при постоянстве момента статического сопротивления Мс двигателя, является напряжение питания U, подаваемое на якорную обмотку двигателя:
ω U/c Mc/β (1) где U Un/γ при несимметричном законе коммутации силовых транзисторов усилителя мощности или
U Un(2 γ 1) при симметричном законе коммутации силовых транзисторов усилителя мощности);
Un напряжение питания усилителя мощности (максимальное напряжение питания двигателя);
γ относительная длительность импульсов напряжения питания;
с постоянная двигателя;
β жесткость механической характеристики двигателя.
Очевидно, что от точности задания напряжения питания двигателя при Мс const прямо пропорционально зависит и точность регулирования скорости δω. Поэтому для повышения точности регулирования скорости требуется иметь высокую точность задания напряжения питания U двигателя и при Un const соответственно высокую точность задания относительной длительности импульсов управления γ В цифровом электроприводе относительная длительность импульсов γ формируется цифровым широтно-импульсным модулятором и задается цифровым кодом при помощи задающего устройства, например ЭВМ. Длительность импульсов стабильна во времени при значительных колебаниях температуры и напряжения питания схемы управления. Цифровой способ представления и обработки информации позволяет создавать прецизионные цифровые системы автоматического управления с относительной приведенной погрешностью до 0,001% в статике и в динамике. Точность поддержания заданной скорости в статике определяется нестабильностью частоты кварцевого генератора, достигающей 0,0001.0,001% В схемах серии SL 680/1680 ("схемах, сохраняющих свойства кварцевых резонаторов") фирмы Plessey Semiconductors стабильность частоты составляет 0,001 млн. ч/град Цельсия и 0,1 млн.ч. С помощью кварцевого резонатора можно обеспечить стабильность частоты порядка нескольких миллионных долей в нормальном температурном диапазоне. Поскольку от стабильности кварцевого генератора зависит и точность преобразования управляющего кода в относительную длительность импульсов управления γ и в дальнейшем точность регулирования скорости, то можно сделать вывод, что точность регулирования скорости в цифровом электроприводе будет выше, чем в аналоговом. Очевидно, что подобную точность регулирования скорости не сможет обеспечить ни один аналоговый регулятор.
Плавность регулирования скорости задается цифровым регулятором, например ЭВМ, и характеризуется числом дискретных значений регулируемого параметра, реализуемых при данном способе в диапазлне регулирования скоростей. Чем выше число реализуемых ступеней, тем выше плавность. Так, плавность регулирования в аналогах аналговых электроприводах и в прототипе определяется числом витков проволочного потенциометрического регулятора и ограничивается пятьюстами витков и соответствующим количеством дискретных значений управляющего сигнала. В предлагаемом цифровом электроприводе число дискретных значений управляющего сигнала определяется разрядностью системы и уже при десятых разрядах цифрового регулятора составляет 1024. Плавность регулирования скорости в прецизионных электроприводах может считаться приемлемой при 10 и более разрядах цифрового регулятора, а уже при 12-ти разрядном регуляторе достигается 096 дискретно реализуемых ступеней регулирования, то есть динамический диапазон регулируемого параметра превышает диапазон указанных аналоговых систем. Вполне возможно применение цифровых регуляторов скорости и с большей разрядностью. При максимальной скорости двигателя ω макс и m-разрядной схемы управления величина единичного шага дискретно заданной скорости в формуле (1), соответствующая одному младшему разряду цифрового регулятора, равна:
ω мин ω макс/2m 1, где ω макс максимально реализуемая скорость электропривода. Очевидно, что по сравнению с прототипом плавность регулирования скорости будет тем выше, чем большую разрядность выбирают для данного способа управления. Однако, чрезмерное увеличение разрядности (свыше 12) приводит к усложнению и удорожанию электропривода.
Таким образом, применение цифровых элементов при управлении электроприводом постоянного тока при Мс const позволяет увеличить точность и плавность регулирования скорости во всем диапазоне регулирования скорости.
Обладая достоинством электропривода-прототипа наличием управления способом двойной широтно-импульсной модуляции, заявляемый электропривод превосходит аналого-цифровые электроприводы по точности регулирования скорости.
Для осуществления непрерывного вращения двигателя на минимальной (за период) скорости согласно положениям, приведенным с диссертации Мастюкова Ч. И, при симметричном законе коммутации силовых ключей усилителя мощности транзисторных должно выполняться следующее условие:
Ммакс > Мсмакс;
Мср Мс.ср;
ω (tмакс) > 0 (2) Здесь Ммакс СмIмакс максимум электромагнитного момента двигателя;
См коэффициент момента двигателя;
Iмакс максимум тока якорной цепи;
Мср средний за период импульса электромагнитный момент;
Мс.ср среднее значение момента статического сопротивления за то же время;
ω (tмакс) значение мгновенной скорости двигателя, соответствующее максимальному моменту статического сопротивления Мсмакс.
При управлении способом ДШИМ на якорную обмотку двигателя подается импульсное напряжение, имеющее две составляющие: высокочастотную и низкочастотную. Высокочастотная составляющая импульсов образует постоянный ток якоря и постоянный электромагнитный момент уравновешиваемый с средним значением момента статического сопротивления (второе равенство системы (2)). Низкочастотная же составляющая создает броски электромагнитного момента, преодолевающие максимальные броски моментов статического сопротивления (согласно первому неравенству системы (2)). При широтно-импульсном управлении величина момента М определяется относительной длительностью включения двигателя.
При наличии только высокочастотных импульсов напряжения максимумы пульсаций электромагнитного момента недостаточны для выполнения условий (2) и при М < <Мсмакс двигатель останавливается, поэтому диапазон регулирования скорости оказывается ограниченным. При наличии только низкочастотных импульсов напряжения для выполнения условий (2) максимумы электромагнитного момента двигателя должны быть значительнобольшими, чем в случае питания двигателя высокочастотыми и низкочастотными импульсами напряжения. Поэтому снижается КПД и ухудшаются условия коммутации двигателя.
Аналитическую зависимость момента статического сопротивления в функции времени Мс f/(t) установить невозможно. Однако, методом планирования эксперимента можно установить регрессионную зависимость этой функции и в экспериментальных точках выделить максимальные значения Мсмакс. Регрессионная зависимость позволяет выделить периодичность, частоту и продолжительность момента Мс макс во времени, а экспериментальные точки оценят их значения. Если момент Мс нарастает до максимального значения скачкообразно, то для его преодоления необходимо быстрое (такое же скачкообразное) нарастание электромагнитного момента двигателя.
При увеличении скорости, начиная с некоторого ее значения, колебания момента Мс уменьшаются и по мере приближения скорости вращения к обасти средних скоростей необходимость в дополнительных пульсациях электромагнитного момента совпадает, что позволяет увеличить КПД электропривода в области средних и больших скоростей.
Длительность импульсов и частоту низкочастотного генератора импульсного напряжения выбирают из условия получения максимального диапазона регулирования скорости.
Генератор импульсного напряжения является низкочастотным потому, что предельная длительность импульсов напряжения оказывается соизеримой с электромагнитной постоянной времени двигателя, которая в микроэлектроприводах (мощностью до 1 кВт) находится в интервале от нескольких единиц до нескольких сот миллисекунд. Минимальная относительная длительность импульсов близка к 0,5. Поэтому частота f находится в пределах от нескольких единиц до нескольких сот герц, значительно меньших несущей частоты импульсов высокочастотного генератора, определяемой из условия минимума потерь мощности в двигателе и коммутирующих силовых транзисторных ключах.
Чтобы уменьшить пульсации тока якорной цепи по мере увеличения скорости и сохранить КПД неизменным в области средних и боьших скоростей, длительность импульсов низкочастотного генератора должна уменьшаться по мере увеличения скорости двигателя, то есть, по мере увеличения управляющего воздействия.
Итак, применение цифрового управления в сочетании с управлением электропривода постоянного тока способом ДШИМ позволяет достичь высокой точности и плавности регулирования скорости. При этом не исключается возможность введения обратных связей в систему управления.
Авторам неизвестны технические решения, использующие отличительные признаки заявляемого технического решения, которые только в полной своей совокупности обеспечивает ему новые свойства, следовательно, заявляемый электропривод соответствует критерию "существенные отличия".
Сущность изобретения поясняется фиг. 1.10.
На фиг. 1 цифрами обозначено: 1 электродвигатель, 2.5 транзисторные ключи; 5.9 обратные диоды; 10 шины питания; 11, 12 логические элементы И-НЕ; 13, 14 линии задержек; 15, 16 логические элементы И; 17 блок цифрового задания скорости; 18 преобразователь кода; 19 низкочастотный генератор; 20 коммутатор; 21 первые входы коммутатора 20; 22 вторые входы коммутатора 20; 23 управляющий вход коммутатора 20; 24 высокочастотный генератор; 25 формирователь импульсов управления; 26 прямой выход формирователя 25; 27 инверсный выход формирователя 25.
Выходы блока 17 цифрового задания скорости соединены с первыми входами 21 коммутатора 20 и входами преобразователя 18 кода, выходы которого соединены с вторыми входами 22 коммутатора 20. Количество выходов блока 17, входов преобразователя 18 кода, входов 21, 22 коммутатора 20, входов формирователя 25 определяется количеством разрядов блока 17 цифрового задания скорости. Точность и плавность регулирования скорости в прецизионных электроприводах может считаться приемлемой при 9-ти и более разрядах цифрового регулятора, а уже при 12-ти разрядном регуляторе достигается 4096 дискретно реализуемых ступеней регулирования. Вполне возможно применение цифровых регуляторов скорости и с большей разрядностью. Однако, чрезмерное увеличение разрядности (свыше 12) приводит к усложнению и удорожанию электропривода. Управляющий вход 23 коммутатора 20 соединен с низкочастотным генератором 19. К выходам коммутатора 20 подключены первые входы формирователя 25 импульсов управления. К второму входу подключен высокочастотный генератор 24. Прямой и инверсный выходы 26, 27 формирователя 25 через элементы И-НЕ 11, 12, линии 13, 14 задержек и элементы И 15, 16 соединены с управляющими входами двух транзисторных ключей 2, 4. Управляющие входы двух других транзисторных ключей 3, 5 соединены с выходами и вторыми входами элементов И-НЕ 11, 12, первые входы которых соединены с вторыми входами противоположных элементов И 15, 16. Транзисторные ключи 2.5 вместе с параллельно включенными обратными диодами образуют мостовую схему усилителя мощности, в одну диагональ которого включен двигатель 1 постоянного тока, а к другой диагонали по шинам 10 подводится напряжение U12 питания усилителя мощности.
Цифровой электропривод постоянного тока с двойной широтно-импульсной модуляцией работает следующим образом.
При управлении скоростью двигателя 1 на первые входы 21 коммутатора 20 от блока 17 цифрового задания скорости (например, ЭВМ) поступает m-разрядный цифровой код управления (число A). Одновременно код управления A поступает на входы преобразователя 18 кода, который по особому закону формирует дополнительный код (число В). Число В выбрано большим числа A из условия создания бросков электромагнитного момента согласно первому неравенству выражения (2). На практике рекомендуется применять следующий закон изменения числа В:
B 
 A2;
A2;
(3) Здесь Δ A добавочный код управления, требуемый для формирования кода В в интервале значений кода от A 0 до A A2, то есть, в интервале действия управления способом ДШИМ, величина добавочного кода Δ A определяется выражением:
ΔA 




(4) График выражения (4) приведен на фиг. 2. В выражении (4) и на фиг. 2 обозначено:
A1 значение кода A, соответствующее максимальному значению добавочного кода Δ A;
A2 максимальное значение кода A, при котором действует управление способом ДШИМ;
k1, k2 коэффициенты пропорциональности.
В соответствии с (3) и (4) получен график зависимости кода В в функции кода A, вид которого приведен на фиг. 3. Численные значения параметров выражений (3), (4) определяются экспериментально.
Код В поступает на вторые входы 22 коммутатора 20. В зависимости от состояния логических уровней напряжения U1 на входе 23 коммутатора 20 на его выходах появляется код С, представляющий собой либо код A, либо код B:
C 



(5) где U1 0 напряжение импульсной формы низкочастотного генератора 19, соответствующее паузе;
U1 1 напряжение импульсной формы низкочастотного генератора 19, соответствующее импульсу.
В соответствии с величиной кода С на входах формирователя 25 на его прямом выходе 26 появляется последовательность импульсов напряжения U3, длительность tU3 которых пропорциональна значению кода С, а их частота f2 задается частотой f2 напряжения U2 высокочастотного генератора 24. На инверсном выходе 27 формирователя 25 появляется последовательность импульсов напряжения U4, длительность tU4 которых обратно пропорциональна значению кода С. Код С периодически изменяется с периодом Т1, также периодически с периодом Т1 (при постоянном значении управляющего кода A) изменяется длительность импульсов напряжения U3 и становится пропорциональной значению кода A во время действия импульсов напряжения U1 генератора 19 и пропорциональной значению кода В во время пауз напряжения U3. Импульсы напряжений U3 и U4, изменяющиеся в противофазе, поступают на триггерную схему, образованную элементами И-НЕ 11, 12, а затем на входы элементов И 15, 16. Выходные импульсы напряжений U5 и U6 элементов И-НЕ 11, 12 управляют транзисторными ключами 3, 5 соответственно, а также поступают через линии 13, 14 задержек на вторые входы элементов И 15, 16 (напряжения U7, U8). От выбора длительности задержки зависит закон коммутации транзисторных ключей 2, 3, 4, 5. При длительности задержки выходных импульсов напряжений U7, U8 линий 13, 14 задержек несколько большей половины периода Т2 импульсов (на 5.10 мкс при частоте следования импульсов, равной нескольким килогерцам) реализуется несимметричный закон коммутации. При длительности задержки выходных импульсов напряжений U7, U8 линий 13, 14 задержек несколько меньшей половины периода Т2 импульсов (на 5. 10 макс при частоте следования импульсов, равной нескольким килогерцам) реализуется симметричный закон коммутации. Импульсы напряжений U9, U10, вырабатываемые элементами И 15, 16, управляют транзисторными ключами 2, 4 соответственно. Линии 13, 14 задержек позволяют исключить сквозные токи через транзисторные ключи 2, 3, 4, 5. Управляя транзисторными ключами 2, 3, 4, 5 формируют на зажимах двигателя 1 напряжение U11, вызывающее вращение двигателя в ту или иную сторону со скоростью заданной величиной управляющего кода.
На фиг. 4 показаны временные диаграммы, поясняющие принцип действия предлагаемого цифрового электропривода постоянного тока, управляемого по симметричному закону коммутации транзисторных ключей 2, 3, 4, 5 (фиг. 1). Управляющим сигналом является код числа A. Управляющий m-разрядный код числа A и дополнительный m-разрядный код числа В изображены на фиг. 4 в виде уровней этих чисел, а на схеме (фиг. 1) коды A и В поступают на первые 21 и вторые 22 входы коммутатора 20 соответственно. На управляющий вход 23 коммутатора 20 подаются импульсы напряжения U1, поступающие от низкочастотного генератора 19. Длительность tU1 и частота f1 импульсов напряжения U1 выбираются экспериментально конкретно для каждого типа электропривода, причем частота f1 импульсов напряжения U1выбирается примерно на порядок меньше частоты f2 управляющих импульсов напряжения U3 и U4 электропривода и составляет несколько сотен герц при частоте f2 управляющих импульсов напряжения U3 и U4 равной нескольким килогерцам. На выходах коммутатора 20 устанавливается цифровой код С в соответствии с (3), который поступает на цифровые входы формирователя 25 импульсов управления. В соответствии с тактовыми импульсами напряжения U2, генерируемыми высокочастотным генератором 24, на прямом выходе 26 формирователя 25 устанавливаются импульсы напряжения U3 и на инверсном выходе 27 формирователя устанавливаются импулсы напряжения U4. Форма импульсов напряжения U2 прямоугольная с короткими паузами. Длительность пауз t2 тактовых импульсов напряжения U2 выбрана меньше минимальной длительности tU3 импульсов напряжения U3, которая соответствует величине одной единице младшего разряда кода С. Длительность tU3 импульсов напряжения пропорциональна значению кода С, а длительность tU4 импульсов напряжения U4 обратно пропорциональна значению кода С (фазовый сдвиг напряжения U3 и U4 равен 180о). В соответствии с импульсами напряжения U3 и U4 происходит переключение триггерной схемы на элементах И-НЕ 11, 12. Выходные импульсы напряжений U5 и U6 триггерной схемы повторяют напряжения U3 и U4 соответственно. Линия 13 задержки (фиг. 1), формирующая напряжение U7, задерживает напряжение U5, а линия 14 задержки (фиг. 1), формирующая напряжение U8, задерживает импульсы напряжения U6. Выходные напряжения U9 и U10 элементов И 15, 16 (фиг. 1) появляются лишь при совпадении их входных сигналов U4 и U7, U3 и U8соответственно. Причем длительности tU9, tU10 импульсов напряжения U9 и U10 будут меньше длительности tU3, tU4 импульсов напряжений U3 и U4соответственно на величину, определяемую разностью периода Т2 импульсов напряжений U3, U4 и временем задержки линий 13, 14 задержек (фиг. 1) и равной 5.10 мкс.
Напряжения U5, U6, U9, U10 управляют транзисторными ключами 3, 5, 4, 2 соответственно, формируя на зажимах двигателя 1 (фиг. 1) напряжения U11, повторяющие форму напряжения U3. Напряжение U11 вызывает вращение двигателя в соответствии с управляющим сигналом.
На фиг. 5 приведен пример конкретного выполнения блока 17 цифрового задания скорости и преобразователя кода 18.
Блок 17 цифрового задания скорости представляет собой цифровую 12-разрядную вычислительную машину, например, "Электроника-БК-0010", цифровой код A (в примере конкретного выполнения задействованы 12 из 16 разрядов ПВМ) управления которой поступает на A-входы коммутатора 20 (фиг. 6) и A-входы преобразователя 18 кода (фиг. 5). Преобразователь 18 кода выполнен на двух микросхемах 28, 29, представляющих собой постоянные программируемые запоминающие устройства (ППЗУ). В микросхемах 28, 29 ППЗУ записана программа, реализующая закон преобразования кода A в код В в соответствии с (2). С выхода преобразователя 18 код В поступает на В-входы коммутатора 20 (фиг. 6).
На фиг. 6 приведен пример конкретного выполнения низкочастотного генератора 19.
Низкочастотный генератор 19 постоен на логических элементах НЕ 30.32, И 33, 34, счетчиках 35.40, RS-триггере 41, кварцевом резонаторе 42, резисторах 43.47, конденсаторах 48.51, переключателях 52.63. Выходным сигналом низкочастотного генератора 19 являются напряжения U1 и U14, представляющие последоввательности прямоугольных импульсов с частотой f1, равной 488,3 Гц. Для формирования низкочастотных импульсов предназначен кварцевый генератор, собранный на элементах НЕ 30.32 (схема этого генератора приведена в кн. Шило В. Л. Популярные цифровые микросхемы. Справочник М. Радио и связь, 1988). Частота f3 напряжения U15 этого генератора в 4096 раза больше частоты f1импульсов напряжения U1 и равна 2 МГц. Напряжение U15 поступает на вход "+1" счетчика 35 и на вычитающий вход "-1" счетчика 38. Счетчики 35.37 представляют собой делитель на 4096. После деления счетчиками 35.37 частоты f3 2 МГц до частоты f1 488,3 Гц импульсы напряжения с выхода "≥ 15" счетчика 37 поступают на формирователь коротких пауз. Формирователь коротких пауз выполнен на логическом элементе И 23, резисторах 44, 45 и конденсаторе 50. Напряжение U16 с выхода элемента И 33 поступает на вход "РЕ" счетчика 38 и на R-вход триггера 41. Триггер 41 низким уровнем напряжения U16 устанавливается в нулевое состояние, то есть на прямом выходе триггера устанавливается логический нуль, а на инверсном выходе логическая единица. Это соответствует тому, что на инверном выходе триггера 41 формируется импульс напряжения U1, а на прямом выходе триггера 41 формируется пауза напряжения U14. Длительность пауз напряжения U16 выбрана меньше минимальной длительности импульсов напряжения U1, которая соответствует величине одной единицы младшего разряда счетчиков 38.40. Одна единица младшего разряда соответствует минимальному коду, равному 0000 0000 0001, который устанавливается переключателями 52.63. Счетчики 38. 40 предназначены для формирования длительности tU1 импульсов напряжения U1 низкочастотного генератора 19. Длительность импульсов напряжения tU1 задается цифровым кодом, присутствующим на D-входах счетчиков 38.40. Цифровой код устанавливается при помощи переключателей 52.63, причем, младшему разряду кода соответствует переключатель 52, а старшему переключатель 63.
Процесс формирования импульса напряжения U1 низкочастотного генератора заключается в следующем.
При установке на D-входах счетчиков 38.40 требуемого кода например, кода 0000 0000 0100, низким уровнем напряжения U16 происходит запись цифрового кода в регистры счетчиков 38.40, на цифровых О-выходах счетчиков также устанавливается код 0000 0000 0100. При поступлении на вход "-1" счетчика 38 первого импульса напряжения U15происходит вычитание из записанного в регистры кода двоичной единицы, а на Q-выходах счетчиков устанавливаетcя код 0000 0000 0011. При поступлении следующего импульса напряжениe U15 на вход "-1" счетчика 38 код на Q-выходах уменьшается снова на единицу и так продолжается до тех пор, пока код на Q-выходах счетчиков 38.40 не станет равным 0000 0000 0000. На выходе "≅ 0" счетчика 40 появляется низкий уровень напряжения, который, проходя через формирователь коротких пауз на логическом элементе И 34, резисторах 46, 47 и конденсаторе 51, поступает на S-вход триггера 31. Триггер 41 устанавливается в единичное состояние, то есть на прямом выходе триггера устанавливается логическая единица, а на инверном выходе логический ноль. Это соответствует тому, что на инверсном выходе триггера 41 формируется пауза напряжения U1, а на прямом выходе триггера 41 импульс напряжения U14.
Процесс счета счетчиками 38.40 происходит за время tU1, соответствующее формированию импульса на инверсном выходе триггера 41. Через время tп1- T1-tU1, соответствующее паузе напряжения U1 с выхода элемента И 33 на вход "РЕ" счетчика 38 поступает короткая пауза (низкий уровень) напряжения U16, и вновь происходит запись кода, установленного переключателями 52.63, а регистры счетчиков 38.40. Этим же низким уровнем напряжения U16 триггер 41 устанавливается в нулевое состояние. Далее процесс с периодом Т повторяется: на вход "-1" счетчика 38 поступает импульс напряжения U15 и состояние кода счетчиков уменьшается на единицу и так далее до тех пор, пока код на О-выходах счетчиков не станет равным 0000 0000 0000, триггер 41 вновь устанавливается в единичное состояние и т.д. Далее импульсы напряжений U1, U14 поступают на управляющие входы коммутатора 20 (фиг, 7).
На фиг. 7 приведен пример конкретного выполнения коммутатора 20. Коммутатор 20 построен на шести микросхемах 64.69, каждая из которых содержит по два элемента 2-2-И-ИЛИ-НЕ, а также на 12-ти логических элементах НЕ 70. 81. Элементы НЕ подключены к выходам микросхем 64.69. На входы "A1, A2" микросхем 64.69 поступает цифровой код A от блока цифрового задания скорости (фиг. 5), а на входы "В1, В2" микросхем 64.69 (фиг. 7 цифровой код В от преобразователя 29 кода (фиг. 5). В зависимости от состояния управляющих сигналов напряжений U1, U14 на управляющих входах A (выводы 3, 13) и В (выводы 5, 10) микросхем 64.69 (фиг. 7) на выходах элементов НЕ 70.81, согласно (5) формируется код С, представляющий собой либо код A, когда на управляющих входах A логическая единица, а на управляющих входах В логический уровень, а на управляющих входах В логическая единица. Напряжения U1, U14 поступают на управляющие входы A и B микросхем 64.69 коммутатора 20 от низкочастотного генератора 19 (фиг. 6). С выходов элементов НЕ 70.81 (фиг. 7) код С поступает на D-входы формирователя 25 импульсов управления (фиг. 8).
На фиг. 8 приведен пример конкретного выполнения высокочастотного генератора 24 и формирователя 25 импульсов управления. Высокочастотный генератор 24 построен на логических элементах НЕ 82.84, логическом элементе И 85, счетчиках 86.88, кварцевом резонаторе 89, резисторах 90.92 и конденсаторах 93. 95. Для формирования высокочастотных импульсов предназначен кварцевый генератор, собранный на элементах НЕ 82.84. Частота f4 напряжения U17 этого генератора в 4096 раза больше частоты f2 импульсов напряжения U3 (или U4) и равна 20 МГц. Напряжение U17 поступает на вход "+1" счетчика 86 и на вычитающий вход "-1" счетчика 97 формирователя 25. Счетчики 86.88 представляют собой делитель на 4096. После деления счетчиками 86.88 частоты f4 20 МГц до частоты f2 4883 Гц напряжение с выхода "≥ 15" счетчика 88 поступают на формирователь коротких пауз. Формирователь коротких пауз выполнен на логическом элементе И 85, резисторах 91, 92 и конденсаторе 95. Напряжение U2 с выхода элемента И 85 поступает на входы "РЕ" счетчиков 97.99 и R-вход триггера 100 формирователя 25 импульсов управления.
Формирователь 25 импульсов управления построен на логическом элементе И 96, счетчиках 97.99, RS-триггере 100, резисторах 101, 102 и коденсаторе 103. Процесс формирования импульсов напряжений U3 и U4управления аналогичен формированию импульсов напряжений U1 и U4низкочастотного генератора 19. Выходными сигналами формирователя 25 являются напряжения U3, U4, представляющие последовательности прямоугольных импульсов с частотой f2 равной 4883 Гц. Частоту f2импульсов управления задает высокочастотный генератор 24. Напряжение U2с выхода высокочастотного генератора 24 поступает на вход "РЕ" счетчика 97 и на R-вход триггера 100. Триггер 100 низким уровнем напряжения U2устанавливается в нулевое состояние, то есть на прямом выходе триггера устанавливается логический нуль, а на инверсном выходе триггера логическая единица. Это соответствует тому, что на инверсном выходе триггера 100 формируется импульс напряжения U3 и на прямом выходе триггера 100 пауза напряжения U4. Длительность t2 импульсов напряжения U2 выбрана меньше минимальной длительности tU3 импульсов напряжения U3, которая соответствует величине одной единицы младшего разряда счетчиков 97.99. Одна единица младшего разряда соответствует минимальному коду С, равному 0000 0000 0001. Счетчики 97. 99 предназначены для формирования длительности tU3 импульсов напряжения U3формирователя 25. Длительность tU3 импульсов напряжения U3 задается цифровым кодом С, присутствующим на D-входах счетчиков 97.99. Код С устанавливается коммутатором 20 в соответствии с (5). Процесс образования импульса напряжения U3 формирователя 25 заключается в следующем. При наличии на D-входах счетчиков 97.99 кода управления, например, кода 0000 0000 0010, низким уровнем напряжения U2 происходит запись цифрового кода в регистры счетчиков 97.99, на цифровых 0-выходах счетчиков также устанавливается код 0000 0000 0100. При поступлении на вход "-1" счетчика 97 первого импульса напряжения U17 происходит вычитание из записанного в регистры кода двоичной частоты, а на О-выходах счетчиков устанавливается код 0000 0000 0011. При поступлении следующего импульса напряжения U17 на вход "-1" счетчика 97 код на 0-выходах уменьшается снова на единицу и так продолжается до тех пор, пока состояние кода на 0-выходах счетчиков 97.99 не станет равным 0000 0000 0000. На выходе " ≅0" счетчика 99 появляется низкий уровень напряжения, который проходя через формирователь коротких пауз на логическом элементе И 96, резисторах 101, 102 и конденсаторе 103, поступает на S-вход триггера 100. Триггер 100 устанавливается в единичное состояние, то есть на прямом выходе триггера устанавливается логическая единица, а на инверсном выходе логический ноль. Это соответствует тому, что на инверсном выходе триггера 100 формируется пауза напряжения U3, а на прямом выходе триггера 100 формируется импульс напряжения U4. Время счета счетчиками 97.99 происходит за время tU3, соответствующее формированию импульса на инверсном выходе триггера 100. Время tU3, в течение которого триггер 100 находится в единичном состоянии, соответствует импульсу напряжения U3 и паузе напряжения U4. Через время tU3 T2 tU3, соответствующее паузе напряжения U3, с выхода элемента И 85 высокочастотного генератора 24 на входы "РЕ" счетчиков 97.99 поступает короткая пауза (низкий уровень) напряжения U2 и вновь происходит запись кода, присутствующего на D-входах счетчиков 97.99 в регистры этих счетчиков. Этим же низким уровнем напряжения U2триггер 100 устанавливается в нулевое состояние. Далее процесс с периодом Т2 повторяется: на вход "-1" счетчика 97 поступает импульс напряжения U17 и состояние кода счетчиков уменьшается на единицу и так далее до тех пор, пока на выходах счетчиков не станет равным 0000 0000 0000, триггер 100 вновь устанавливается в единичное состояние и т. д.
При переключении коммутатором 20 кода A на код В в соответствии с (5) на прямом выходе 26 (инверсный выход триггера 100) формирователя 25 образуются импульсы напряжения U3 управления, длительность tU3 которых пропорциональна кодам A и В, а на инверсном выходе 27 (прямой выход триггера 100) формирователя 25 образуются импульсы напряжения U4управления, длительность tU4 которых обратно пропорциональна либо коду A, либо коду В. Далее импульсы напряжений U3, U4 поступают на входы логических элементов И-НЕ 11, 12 (фиг. 9).
На фиг. 9 приведен пример конкретного выполнения элементов И-НЕ 11, 12 линий 13, 14 задержек элементов И 15, 16.
На выходы элементов И-НЕ 11, 12 подаются напряжения U3, U4. Эти напряжения подаются также на входы элементов И 15, 16. Выходы элементов И-НЕ 11, 12 подключены к транзисторным ключам 3, 5 соответственно (фиг. 10), а также к линиям 13, 14 задержек. Линия задержки 13 обеспечивает задержку импульсов напряжения U5 на время несколько меньшее половины периода следования импульсов управления (на 5.10 мкс при частоте, равной нескольким килогерцам, в данном примере равной 4883 Гц) при симметричном законе коммутации. Элементы НЕ 104, 105, резисторы 112, 113 и конденсаторы 120, 121 обеспечивают задержку импульса напряжения U5 на половину периода. Задержку еще на 5.10 мкс осуществляют элементы НЕ 106, 107, резисторы 114, 115 и конденсаторы 122, 123. Элементы НЕ 104, 106 осуществляют задержку импульса по фронту, элементы НЕ 105, 107 осуществляют задержку импульса по его спаду. Время задержки каждого элемента НЕ 104.107 определяется порогом срабатывания элемента НЕ и задается параметрами конденсаторов 120.123 (грубо) и резисторов 112.115 (точно). Линия 14 задержек построена идентично линии 13 задержек и выполнена на элементах НЕ 103.111, резисторах 116.119 и конденсаторах 124.127. Назначение элементов и принцип их работы тот же, что и для линии 13 задержек. Выходные напряжения U7, U8 линий 13, 14 задержек подаются на вторые входы элементов И 15, 16. Выходные напряжения U9, U10 элементов И 15, 16 появляются при совпадении входных напряжений U4, U7 для элемента И 15 и U3, U8 для элемента И 16. Напряжения U5, U9 управляют транзисторными ключами 2, 4 (фиг. 10).
На фиг. 10 приведен пример конкретного выполнения мостового усилителя мощности, собранного на транзисторных ключах 2, 3, 4, 5 и обратных диодах 6, 7, 8, 9. Транзисторный ключ 2 выполнен на элементе НЕ 128, транзисторах 129. 131 и резисторах 132.135. Транзисторный ключ 3 выполнен на элементе НЕ 136, транзисторах 137.139, резисторах 140.143. Транзисторные ключи 4, 5 идентичны ключам 2, 3 соответственно.
Практически предлагаемый цифровой электропривод постоянного тока с двойной широтно-импульсной модуляцией реализуется на электрорадиодеталях серийно выпускаемых отечественной промышленностью:
электродвигатель 1 типа ДПР-72-Н2-03;
диоды 6.9 типа КД212А, возможна замена на диоды КД212Б, 2Д212А, 2Д212В;
логические микросхемы 11, 12 (элементы И-НЕ) типа 155ЛАЗ, возможна замена на микросхемы 555ЛАЗ;
логические микросхемы 16, 15 (элементы И) типа 155ЛИ1, возможна замена на микросхемы 555ЛИ1;
блок 17 цифрового задания скорости микроЭВМ типа "Электроника-БК-0010";
логические микросхемы 28, 29 (ППЗУ) типа 556РТ5, возможна замена на микросхемы 155РЕЗ;
логические микросхемы 30.32, 70.84, 104.111, 128, 136 (элементы НЕ) типа 155ЛН1, возможна замена на микросхемы 555ЛН1;
логические микросхемы 32, 34, 85, 96 (элементы И) типа 155ЛИ1, возможна замена на микросхемы 555ЛИ1;
логические микросхемы 35.40, 86.88, 97.99 (счетчики) типа 155ИЕ7, возможна замена на микросхемы 555ИЕ7;
логические микросхемы 41, 100 (RS-триггеры) типа 155ТМ2, возможна замена на микросхемы 555ТМ2;
резонатор кварцевый 42 2 МГц;
резисторы постоянные 43 типа МЛТ-0,125-120±10%
резисторы постоянные 44, 46, 91, 101 типа МЛТ-0,125-10к±10%
резисторы постоянные 45, 47, 92, 102 типа МЛТ-0,125-20к±10%
конденсаторы 48.51, 95, 103 типа КТ-2-68±10%
переключатели 62.63 типа КМ-1;
логические микросхемы 64.69 (элементы 2-2-И-ИЛИ-НЕ) типа 155ЛР1, возможна замена на микросхемы 555ЛР1;
резонатор кварцевый 89 20 МГц;
резистор постоянный 90 типа МЛТ-0,125-68 ±10%
конденсаторы 93,94 типа КТ-1-47 ±10%
резисторы постоянные 112.119 типа МЛТ-0,125-110 ±10%
конденсаторы 120.127 типа КТ-1-0,01 мкФ ±10%
транзисторы 129, 137 типа КТ608А, возможна замена на транзисторы типа КТ608Б;
транзистор 130 типа КТ816В, возможна замена на транзисторы типа КТ816Б, КТ816Г;
транзисторы 131, 139 типа КТ819ВМ, возможна замена на транзисторы типа КТ819БМ, КТ819ГМ;
резисторы постоянные 132, 140 типа МЛТ-0,125-18к ±10%
резисторы постоянные 133, 141 типа МЛТ-0,125-300 ±10%
резисторы постоянные 134, 142 типа МЛТ-0,125-3к ±10%
резисторы постоянные 135, 143 типа МЛТ-0,5-18к ±10%
транзистор 133 типа КТ817В, возможна замена на транзисторы типа КТ817Б, КТ817Г.
Напряжение питания схемы:
логических микросхем V13 +5В,
усилителя мощности на транзисторных ключах 2, 3, 5, 6 V12 27В.
На основании составленной электрической принципиальной схемы на кафедре электрооборудования летательных аппаратов Казанского авиационного института им. А.Н.Туполева создан макет предлагаемого цифрового электропривода постоянного тока. Устройство прошло лабораторные испытания и оказало реализуемость в достижении поставленной цели. Результаты испытаний приводятся в приложении "Акт испытаний цифрового электропривода постоянного тока с двойной широтно-импульсной модуляцией".
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЧЕТА ИОНОВ | 1994 |
|
RU2066897C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МОЩНОСТЬЮ | 1992 |
|
RU2035767C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2087876C1 |
| ЭЛЕКТРОННЫЙ ТОНОМЕТР | 1990 |
|
RU2020866C1 |
| ЦИФРОВОЙ ФОТОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ РАЗМЕРА | 1996 |
|
RU2117248C1 |
| ЦИФРОВОЙ МОДУЛЯТОР ДЛЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2111608C1 |
| НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ БЕСТРАНСФОРМАТОРНЫЙ | 2022 |
|
RU2787121C1 |
| БЕСТРАНСФОРМАТОРНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2018 |
|
RU2691968C1 |
| НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ И НАПРЯЖЕНИЯ | 2021 |
|
RU2784879C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАПРЯЖЕНИЕМ АВТОМОБИЛЬНОГО ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2095936C1 |
Использование: в оптико-механических системах летательных аппаратов, в системах наведения радиолокаторов, радиотелескопов, антенн радиокомплексов, в различных промышленных установках, например в станках с ЧПУ, роботах и манипуляторах. Электропривод позволяет увеличить точность и плавность регулирования скорости электродвигателя постоянного тока. Сущность: задающим устройством электропривода является блок 17 цифрового задания скорости, подключенный к первым входам коммутатора 20 кодов и через преобразователь 18 кода к вторым входам коммутатора 20. На выходах коммутатора 20 периодически в соответствии с управляющими импульсами напряжения низкочастотного генератора 19, появляется цифровой код, поступающий на выход либо с первых входов, либо с вторых входов коммутатора 20. Цифровой код с выхода коммутатора 20 подается на первые входы формирователя 25 импульсов управления, частоту которых задает высокочастотный генератор 24. Управляющие импульсы с прямого и инверсного выходов формирователя 25 подаются через блок логики, формирующего временную задержку для предотвращения сквозных токов транзисторных ключей, на мостовой усилитель мощности. Управление электродвигателем 1 осуществляется высокочастотными (от генератора 24) и низкочастотными (от генератора 19) импульсами напряжений, то есть по принципу двойной широтно-импульсной модуляции. 10 ил.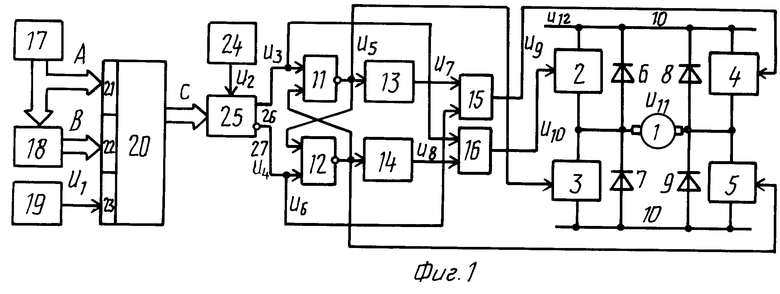
ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ, содержащий электродвигатель, включенный в одну диагональ моста, образованного транзисторными ключами, вторая диагональ моста подключена к шинам питания, высокочастотный генератор, подключенный к первому входу формирователя импульсов управления, прямой и инверсный выходы которого через элементы И НЕ, линии задержки и элементы И соединены с управляющими входами двух транзисторных ключей, управляющие входы двух других транзисторных ключей соединены с выходами элементов И НЕ и вторыми входами противоположных элементов И НЕ, первые входы которых соединены с вторыми входами противоположных элементов И, отличающийся тем, что в него введены блок цифрового задания скорости, преобразователь кода, коммутатор кодов и низкочастотный генератор, при этом выходы блока цифрового задания скорости соединены с первыми входами коммутатора и через преобразователь кода с вторыми входами коммутатора, к входу управления коммутатора подключен низкочастотный генератор, выходы коммутатора подключены к вторым входам формирователя импульсов управления, транзисторные ключи шунтированы обратными диодами.
| Патент США N 4514666, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
