Изобретение относится к машиностроению.
Известно рычажное устройство с подвижной опорой, содержащее смонтированный с возможностью качания в плоскости рычаг, средство для взаимодействия одного элемента рычага с совершающим колебательное движение и прикладывающим приводящее усилие органом, средство для взаимодействия другого элемента рычага с совершающим плоскопараллельное движение и передающим рабочее усилие исполнительным органом и подвижный опорный узел качания рычага, включающий связанную с рычагом ось его качания и опору для оси качания рычага, установленную с возможностью поступательного перемещения в плоскости качания рычага и регулировки расстояния между осью качания рычага и точкой приложения рабочего усилия.
Недостатками такого рычажногоо устройства являются узкий диапазон преобразуемого движения и незначительная величина передаваемого усилия.
Известен пресс, содержащий станину, совершающий колебательное движение орган для приложения приводящего усилия, совершающий плоскопараллельное движение исполнительный орган и рычажное устройство с подвижной осью для кинематической связи между упомянутыми органами, включающее качающийся в плоскости движения рычаг, средство для взаимодействия одного элемента рычага с приводящим органом, средство для взаимодействия другого элемента рычага с исполнительным органом и подвижный опорный узел качания рычага в виде связанной с рычагом оси его качания и опоры для качания рычага, установленной в направляющих с возможностью поступательного перемещения в плоскости качания рычага и регулировки расстояния между осью качания рычага и точкой приложения рабочего усилия.
Недостатками такого пресса являются низкие технологические возможности, усилие прессования и возможность регулировки хода пресса.
Цель изобретения расширение технологических возможностей.
Цель достигается в рычажном устройстве и в прессе за счет того, что опора для оси качания рычага установлена с возможностью свободного перемещения, связь между осью качания рычага и рычагом выполнена с фиксацией от их взаимного поступательного перемещения в плоскости качания рычага и с обеспечением возможности поступательного движения рычага одновременно с его качательным движением при перемещении опоры в процессе работы, а по крайней мере одно из средств взаимодействия с соответствующим элементом качающегося рычага смонтировано с возможностью самоустановки точки приложения соответствующей силы вдоль плеча рычага.
На фиг. 1-4 представлены схематично конструкции различных вариантов рычажных устройств; на фиг.5-10 изображены траектории движения в процессе работы рычажного устройства опоры, точки приложения силы и точки передачи рабочего усилия; на фиг. 11-19 представлен пресс с рычажным устройством; на фиг. 20 и 21 представлен один пример выполнения опор; на фиг.22 и 23 другой пример выполнения опор; на фиг.24 и 25 третий пример выполнения опор; на фиг. 26 пресс, в котором используется опора, изображенная на фиг.24; на фиг. 27 представлена схема электрической системы прессового устройства, изображенного на фиг. 26; на фиг.28 изображен плоскошлифовальный станок, в котором используется рычажное устройство в соответствии с изобретением; на фиг.29 представлена блок-схема управляющей системы плоскошлифовального станка, изображенного на фиг.28; на фиг.30 представлен пример использования рычажного устройства, используемого в демпфирующем устройстве зданий; на фиг.31 представлена блок-схема управляющей системы демпфирующего устройства зданий, изображенного на фиг.30; на фиг.32 схематически представлен пример использования рычажного устройства в качестве диафрагменного насоса; на фиг.33 схематически представлен пример использования рычажного устройства в автомобильном амортизаторе; на фиг.34 изображена цепная система передачи усилия, составленная с присоединением к ней рычажного устройства; на фиг.35 изображен пример использования рычажного устройства в приводном механизме координатного стола; на фиг.36 изображена рабочая траектория главной части, изображенной на фиг.35.
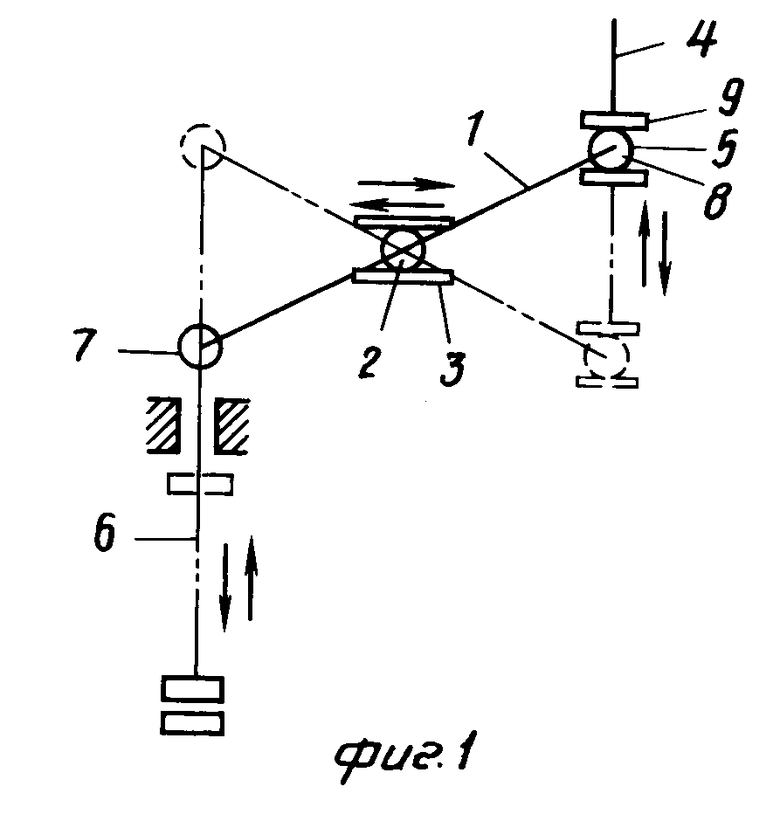
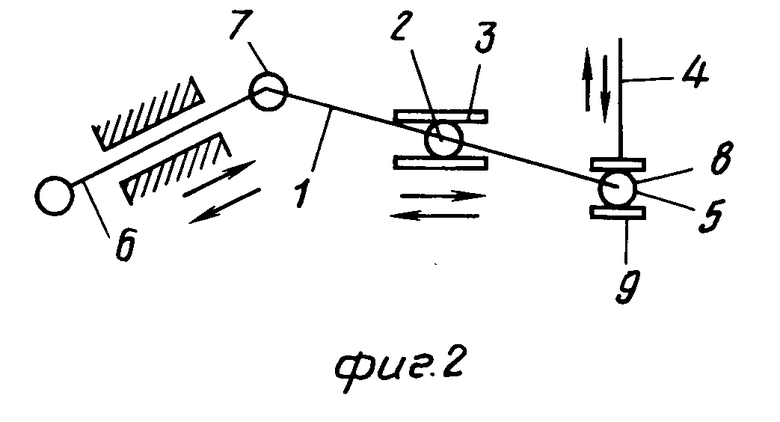
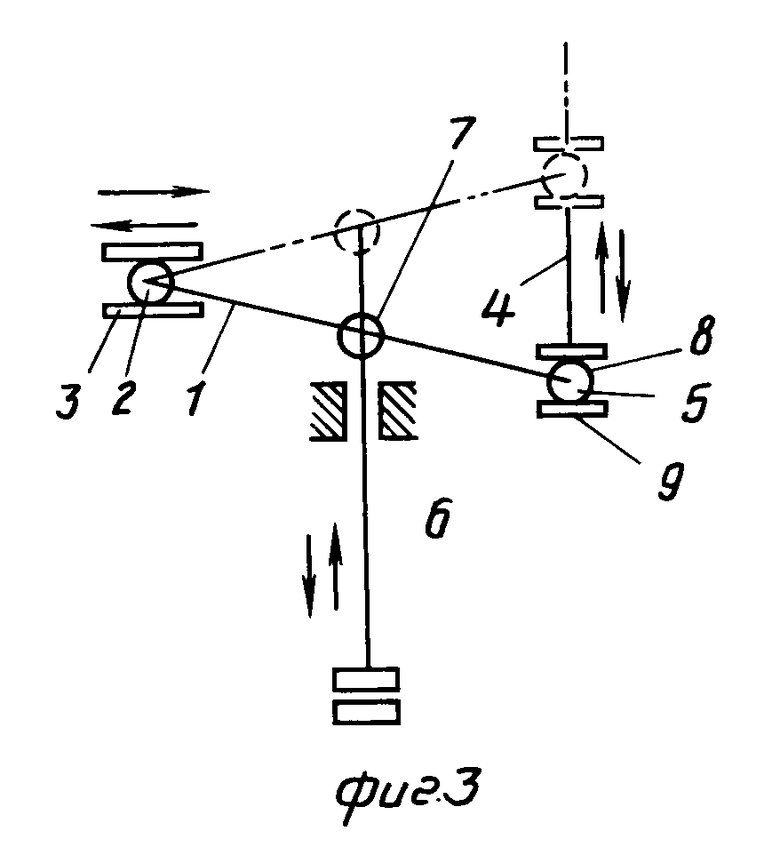
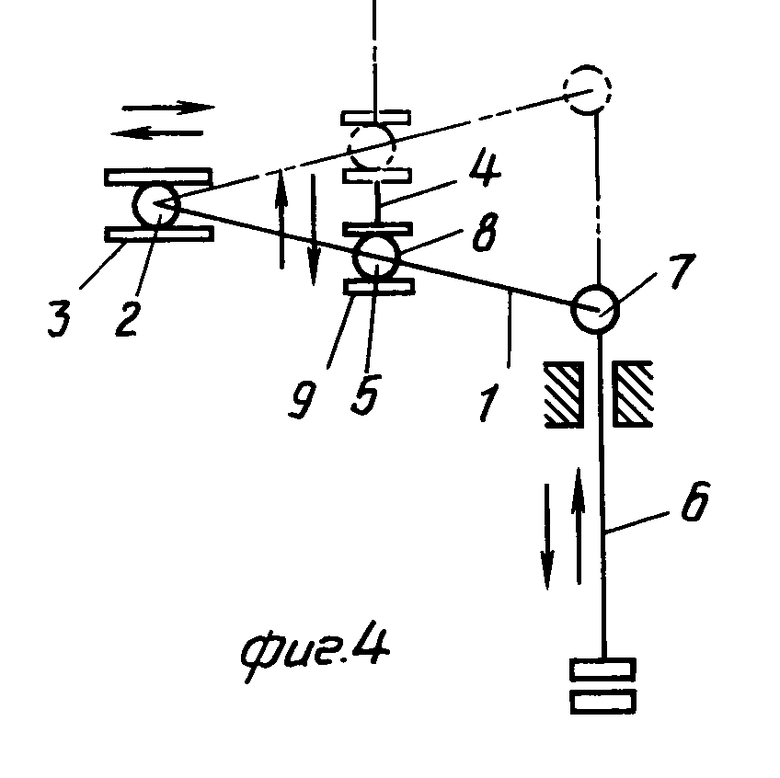
Рычажное устройство содержит рычаг 1, ось 2 качания рычага 1, опору 3 для оси 2 качания рычага. Устройство имеет средство 4 для взаимодействия рычага 1 через расположенный в точке приложения силы соединительный элемент 5 с приводящим органом и средство 6 для взаимодействия рычага 1 через расположенный в рабочей точке соединительный элемент 7 с исполнительным органом. Элемент 5 для присоединения рычага 1 к средству 4 в предпочтительном варианте состоит из элемента типа кулачкового щупа, имеющего ролик 8, который находится в контакте между двумя направляющими пластинами 9.
В каждом из вариантов осуществления рычажных устройств средство 4 приводится в движение прямолинейно и вертикально, а на опору 3 опирается и катится прямолинейно и горизонтально роликовый элемент, ось 2 качания которого установлена на рычаге 1.
В каждом из вариантов осуществления рычажного устройства, изображенных на фиг. 1 и 2, используется внутренняя опора, характеризуемая расположением оси 2 качания между точкой приложения приводящей силы элемента 5 и точкой приложения рабочего усилия элемента 7.
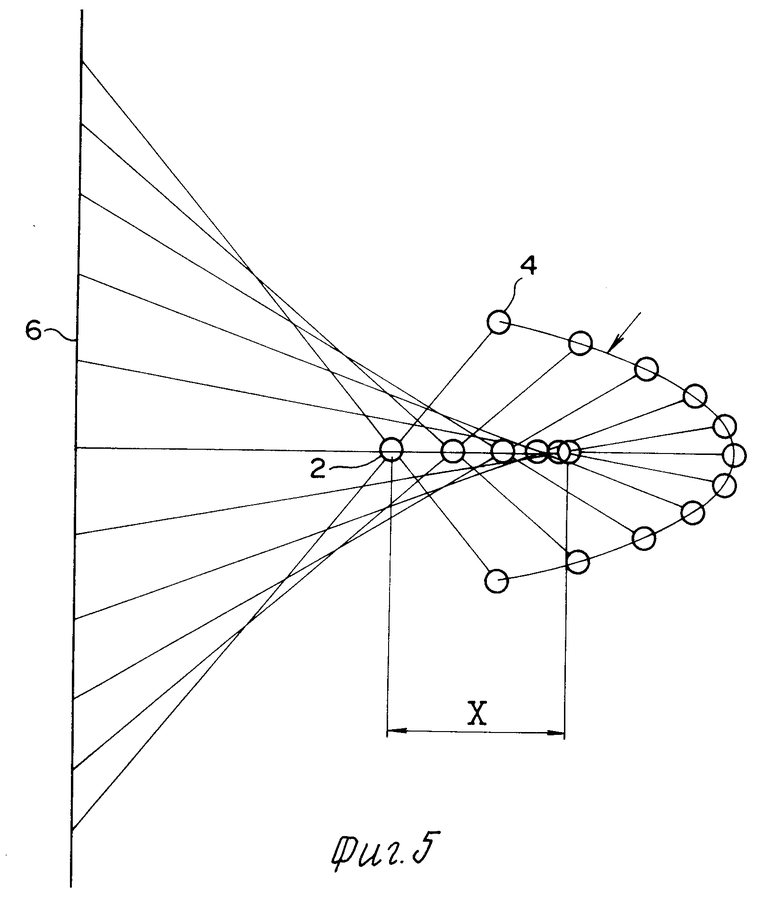
В варианте, изображенном на фиг.1, средство 6 для взаимодействия с исполнительным органом может перемещаться вертикально прямолинейно по траектории, показанной на фиг.5. Иными словами, когда средство 4 для взаимодействия рычага 1 с приводящим органом движется по вертикали, рычаг качается относительно оси 2. В этот момент ось 2 перемещается горизонтально на расстояние Х по опоре 3, в результате чего средство 6 для взаимодействия с исполнительным органом движется прямолинейно вертикально.
В варианте, изображенном на фиг.2, средство 6 движется наклонно прямолинейно, а соединительному элементу 7, расположенному в рабочей точке рычага 1, сообщается эллиптическое движение.
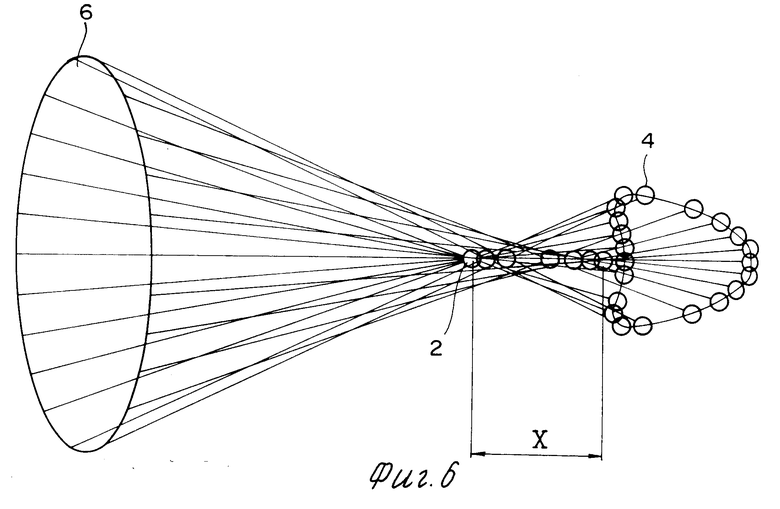
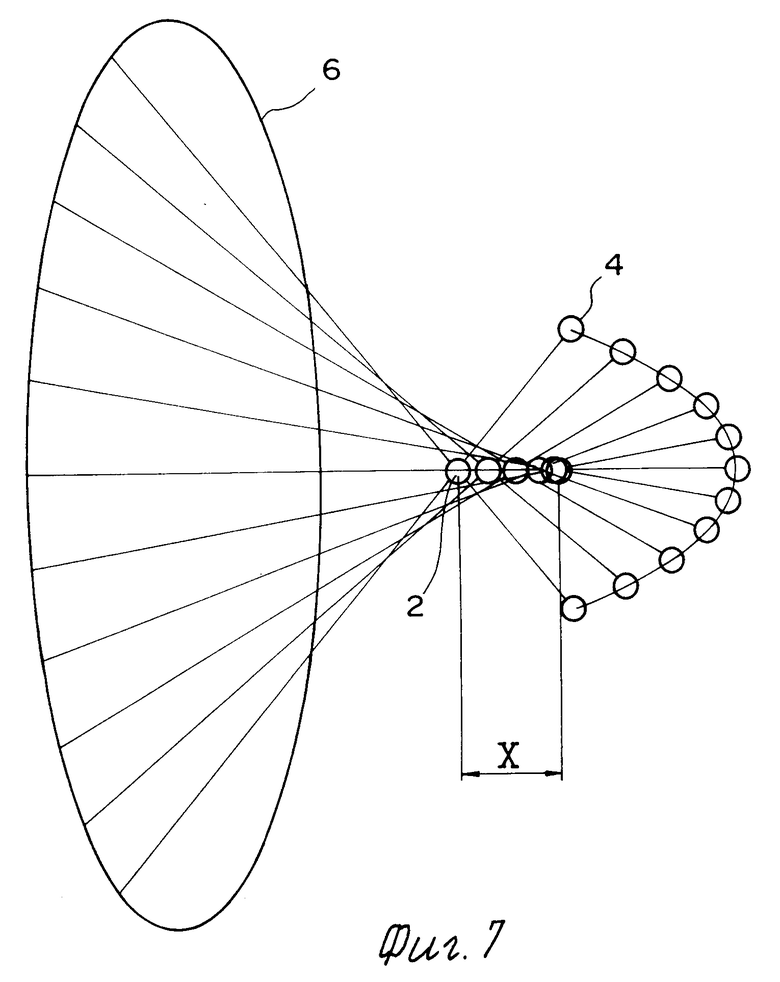
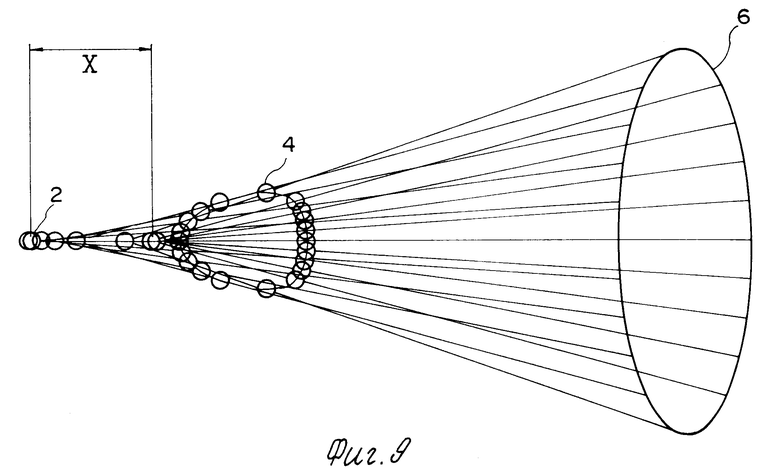
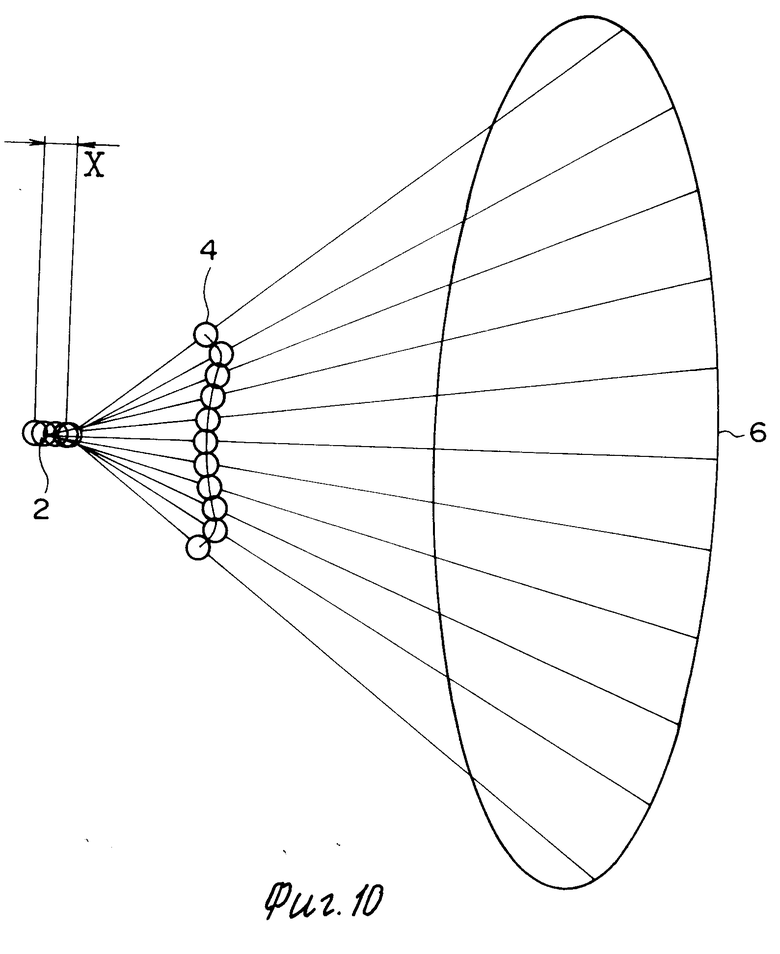
Траектория рабочей точки рычажного устройства, имеющего внутреннюю опору, может быть прямолинейной, как показано на фиг.5, или эллиптической, как показано на фиг. 6 или 7. Расстояние перемещения Х свободно перемещающейся опоры оси качагния на фиг.7 меньше, чем на фиг.6.
В варианте, изображенном на фиг.3, опорный элемент оси 2 и средство для приложения приводящей силы расположены на двух концах рычага 1, а средство 6 для приложения рабочего усилия расположено в промежуточной части рычага 1, в результате чего образуется конфигурация наружной опоры. В этом случае ход со стороны точки приложения рабочего усилия меньше хода со стороны точки приложения приводящей силы и сила увеличена.
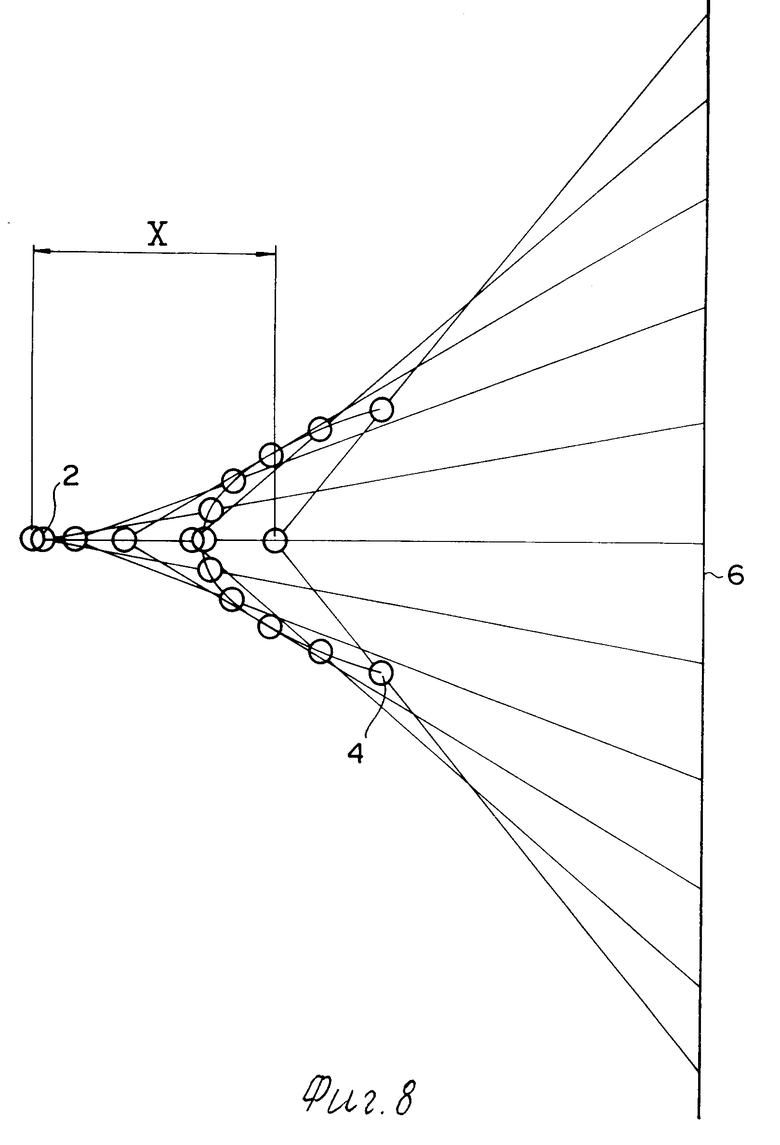
В варианте, изображенном на фиг.4, опорный элемент оси 2 и средство 6 для приложения рабочего усилия расположены на двух концах рычага 1, а средство 4 для приложения приводящей силы расположено в промежуточной части рычага 1. В этом случае ход со стороны рабочей точки больше, чем со стороны точки приложения приводящей силы и сила мала.
На фиг.4 траектория движения средства 6 прямолинейна. На фиг.8 средство 4 имеет параболическую траекторию, а ось 2 имеет траекторию возвратно-поступательного движения. Траектория рабочей точки является эллиптической на фиг.9 и 10.
В каждом из этих осуществлений ввиду того, что ось 2 качания движется свободно в соответствии с движением средства 4 точки приложения силы и с движением средства 6 рабочей точки при качании рычага 1, степени свободы перемещения средства 4 точки приложения силы и средства 6 рабочей точки велики. Соединительный элемент 5 средства 4 точки приложения силы перемещается в оптимальное положение суммой кинетических функций средства 6 рабочей точки и оси 2 качания. Поэтому диапазон перемещений средства 6 рабочей точки расширяется и в то же время может эффективно передаваться движущая сила от средства 4 точки приложения силы и средства 6 рабочей точки через рычаг 1.
Движение оси 2, движение средства 4 точки приложения силы и движение средства 6 рабочей точки могут представлять собой любую комбинацию вертикального прямолинейного движения, горизонтального прямолинейного движения, наклонного прямолинейного движения, вертикального кругового движения, горизонтального кругового движения, наклонного кругового движения и т.п. по мере надобности.
Рычажные устройства со свободно перемещаемой опорой вышеописанных конструкций могут широко использоваться в станках, прессах, промышленном оборудовании и в качестве деталей различных других конструкций.
Рассмотрим пресс, в котором используется рычажное устройство в соответствии с изобретением, применяемый для соединения провода и зажима путем обжатия (фиг.11-19).
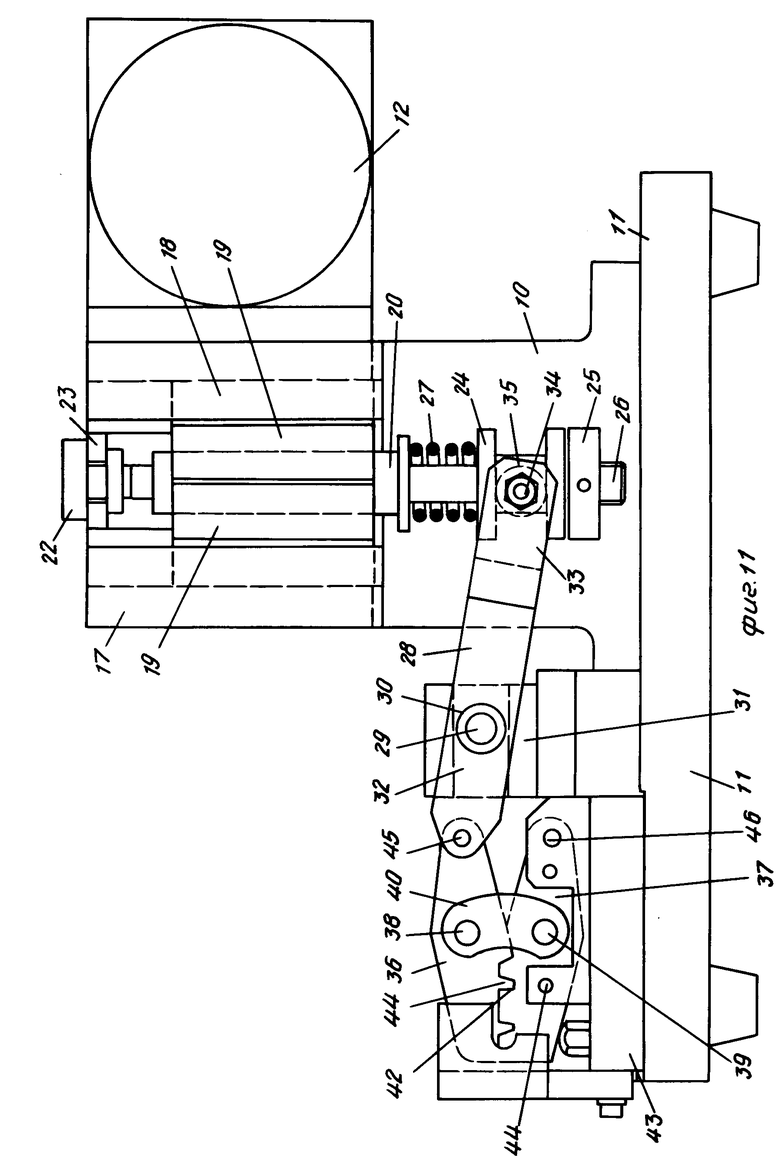
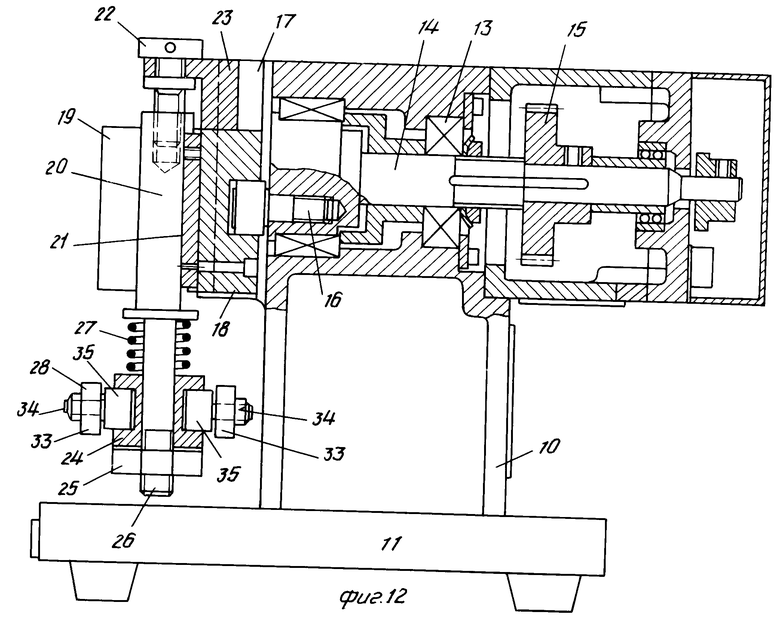
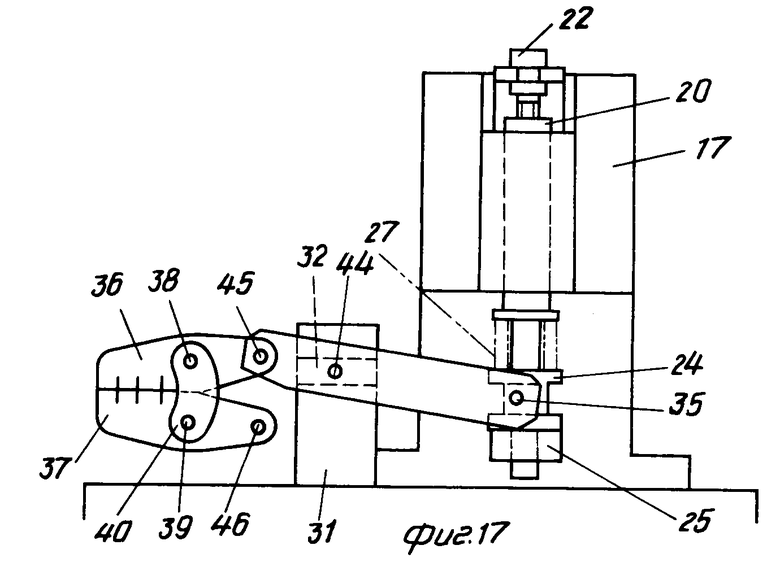
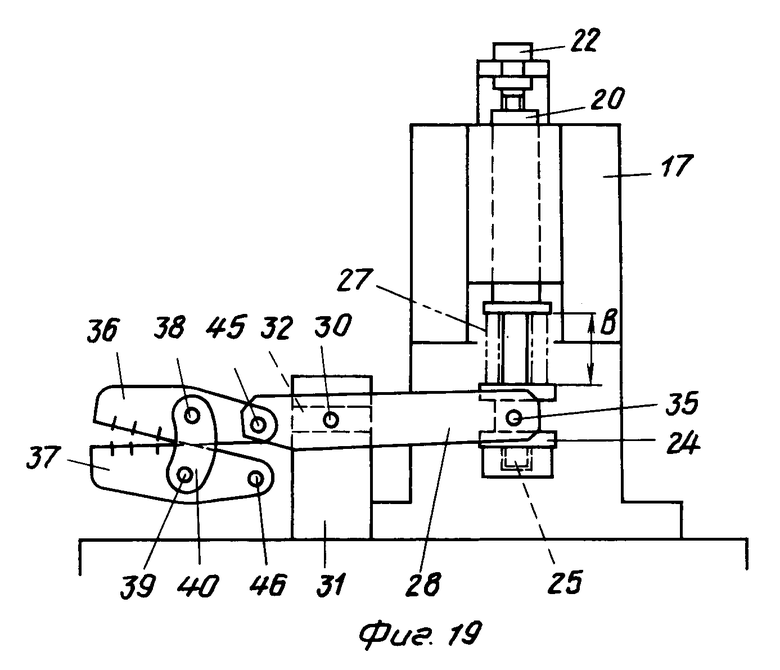
Главный корпус 10 установлен (фиг.11 и 12) на основании 11, в главном корпусе 10 расположен электродвигатель 12. В подшипнике 13 в главном корпусе 10 сидит вращающийся вал 14, на который посажена шестерня 15, воспринимающая вращающий момент с электродвигателя 12. На одном конце вращающегося вала 14 эксцентрично установлен эксцентриковый вал 16. За пределами одного конца главного корпуса 10 в направлении по вертикали установлен направляющий элемент 17. Эксцентриковый вал 16, установленный на вращающемся валу 14, вставлен с возможностью вращения в подъемный элемент 18, который может перемещаться вертикально на направляющем элементе 17. В держатель 19, установленный в подъемном элементе 18, вставлены салазки 20. Салазки могут перемещаться вертикально по направляющей 21, выполненной на подъемном элементе 18. В верхнюю торцовую часть салазок 20 ввернут регулировочный винт 22, установленный в верхней торцовой части 23 подъемного элемента 18 и предназначенный для регулировки нижнего положения салазок 20. В нижней части салазок установлен вертикально перемещаемый кулачок 24, имеющий катушкообразную форму и поддерживаемый снизу гайкой 25, навернутой на резьбовую часть 26, выполненную в верхней торцовой части салазок 20. Салазки прижаты к верхней стороне кулачка 24 цилиндрической пружиной 27 сжатия. В механизме привода, имеющем описанную конструкцию, при работе электродвигателя 12 вращающийся вал 14 приводится во вращение через шестерню 15, а эксцентриковый вал 16 эксцентрично вращается относительно вращающегося вала 14. При эксцентричном вращении эксцентрикового вала 16 подъемный элемент 18 перемещается вертикально по направляющему элементу 17. Салазки 20 и кулачок 24 перемещаются вертикально совместно с подъемным элементом 18. Подъемный элемент 18 и салазки 20 работают как регулятор точки приложения силы.
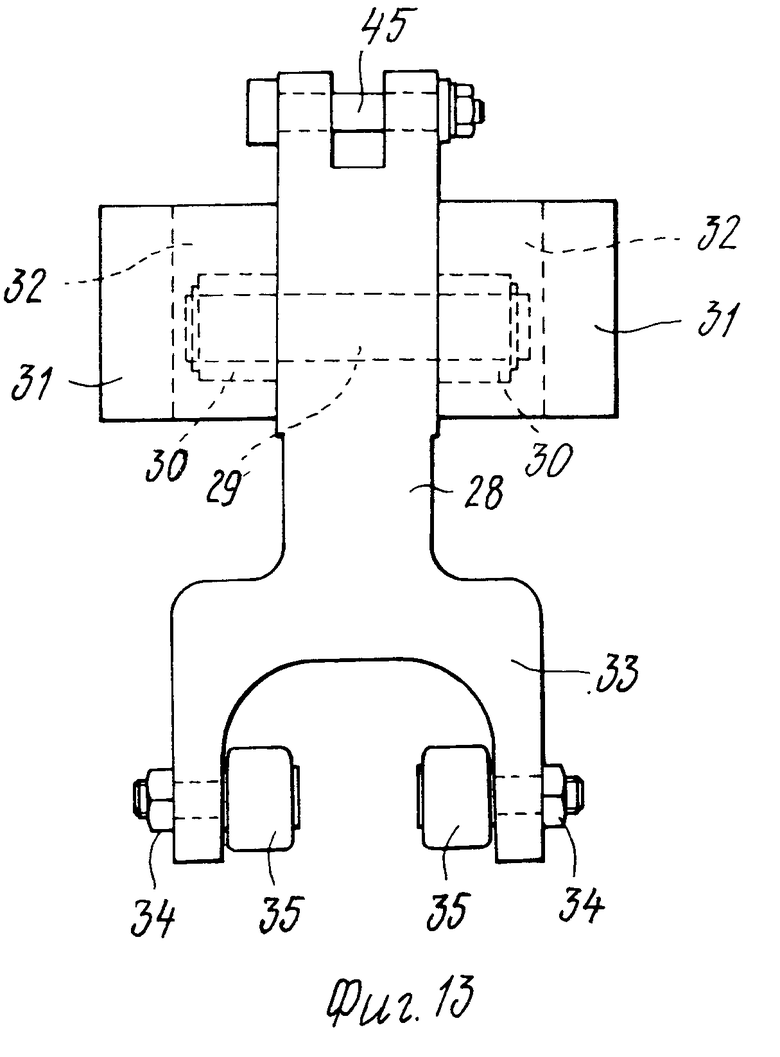
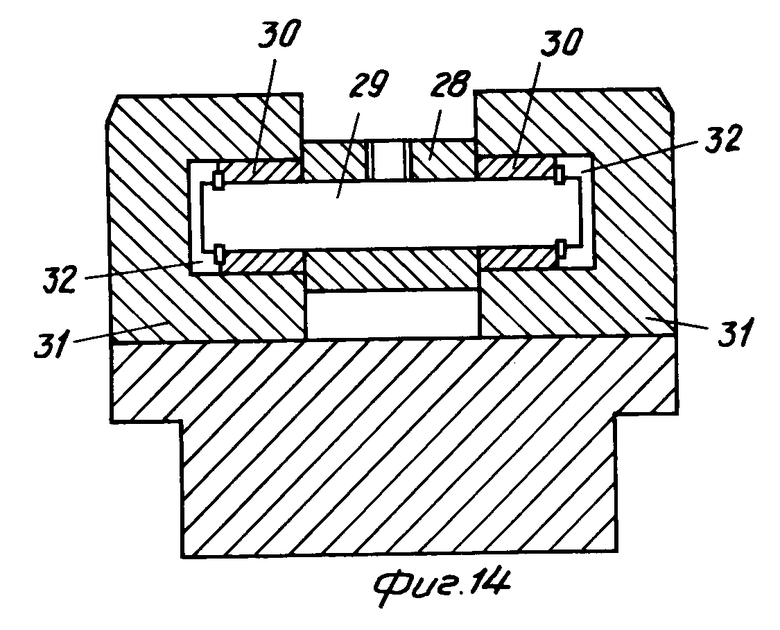
Около салазок 20 на основании 11 в направлении, перпендикулярном вращающемуся валу 14, расположен рычаг 28. Как показано на фиг.13 и 14, в промежуточной части рычага 28 в направлении, перпендикулярном продольному направлению рычага 28, расположена опорная ось 29. На двух концах опорной оси 29 установлены с возможностью вращения опорные ролики 30. На основании 11 в положениях, соответствующих обеим сторонам рычага 28, установлены направляющие элементы 31. В направляющие канавки 32, соответственно выполненные в направляющих элементах 31 по горизонтальному направлению, вставлены с возможностью вращения и перемещения опорные ролики 30 рычага 28. Рычаг 28 поворачивается относительно опорной оси 29 в вертикальной плоскости и может свободно перемещаться по направляющим канавкам 32 на роликах 30. В боковинах развилки 33, выполненной на одном конце рычага 28, установлены горизонтальные оси 34. На осях 34 сидят с возможностью вращения ролики 35. Развилка 33 рычага 28 охватывает с двух сторон кулачок 24 салазок 20, в результате чего ролики 35 установлены с возможностью вращения и перемещения в кулачке 24.
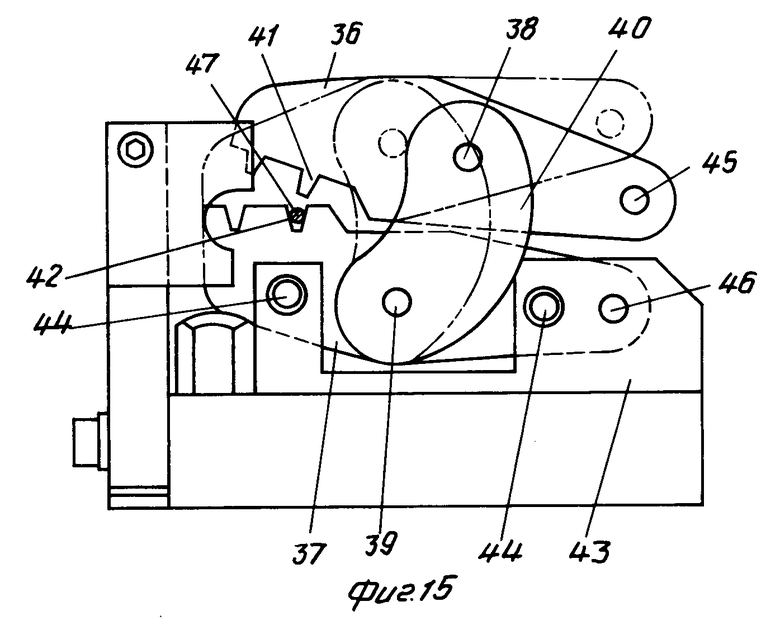
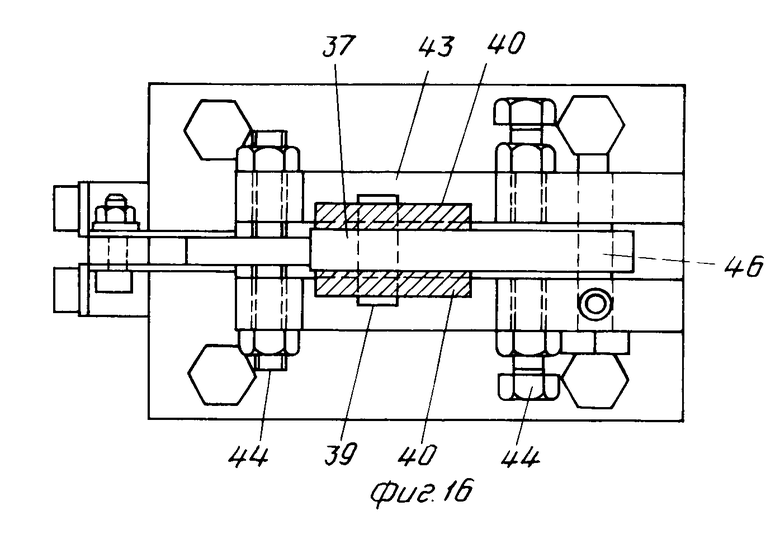
Около рычага 28 на основании 11 расположены две головки 36 и 37. Как показано на фиг.15 и 16, головки напоминают головку гаечного ключа. Головки 36 и 37 установлены с возможностью поворота на поворотных осях 38 и 39 на общем соединительном элементе 40, расположенном в промежуточных частях головок и могут открываться и закрываться. Головки 36 и 37 имеют выступы 41 и углубления 42, в которые выступы входят. Головки 36 и 37 установлены на столе 43 на основании 11 так, что их ближайшие части направлены в сторону рычага 28, одна головка 37 расположена горизонтально как нижняя головка и нижняя головка 37 закреплена болтами 44. Ближайшая торцовая часть верхней головки 36 соединена с возможностью сращения с другим концом рычага 28 через соединительную ось 45. Ближайшая торцовая часть нижней головки 37 соединена со столом 43 через соединительную ось 46.
Пресс, представленный на фиг.16-18, работает следующим образом.
Верхняя головка 36 (фиг.18 и 15) открыта для размещения в ней проволоки и клеммы соединения обжатием (не показаны) в углубление 42 нижней головки 37. В этом случае эксцентриковый вал 16 в приводном механизме перемещается в верхнюю мертвую точку, перемещая салазки 20 вверх. Как показано на фиг.16, вращающийся вал 14 приводится во вращение, перемещая эксцентриковый вал 16 в нижнюю мертвую точку и перемещая сазалки 28 вниз. При движении салазок вниз их движение перемещается к рычагу 28 через кулачок 24 и ролики 35. Рычаг 28 поворачивается по часовой стрелке вокруг опорной оси 29. В то же время опорный ролик 30 перемещается в направлении головки по направляющим канавкам 32 направляющих элементов 31, и, таким образом, рычаг 28 движется свободно. В этом случае благодаря комбинации кулачка 24 и роликов 35 рычаг 28 может приводиться в движение относительно салазок 20. При повороте и движении рычага 28 верхняя головка 36 поворачивается против часовой стрелки вокруг опорной оси 38. Выступ 41 сжимает провод 47 и зажим соединения обжатием (не показан), которые установлены в углубление 42 головки 37, таким образом соединяя обжатием провод 47 с зажимом соединения обжатием, соединительный элемент 40 также работает вокруг опорной оси 39.
После завершения соединения обжатием вращающийся вал 14 приводится во вращение, перемещая эксцентриковый вал 16 в верхнюю мертвую точку. В этом случае операции противоположны вышеописанным.
Силу соединения обжатием задают заданием положения салазок 20 при помощи регулировочного винта 22. Степень развода головок 36 и 37 задается при помощи гайки 25, как показано на фиг.18 и 19, изменяя длину А или В пружины 27.
Поскольку рычаг 28 лежит на опоре 29, совершая комбинированные поворотное движение и движение перемещения, можно эффективно приводить в действие головку 36 для соединения обжатием при движении салазок 20. Движение рычага 28 может поглощать ненужное движение каждой детали, т.е. мертвый ход. Движение салазок 20 может быть передано головке 36 без каких-либо потерь, и может осуществлять медленную работу. Сила салазок может эффективно передаваться, пока осуществляются систематические операции.
В данном осуществлении салазки 20 связаны с рычагом 28 при помощи комбинации кулачка 24 и роликов 35. Преимущество такой конструкции состоит в том, что можно получить большую механическую прочность, можно поглотить ненужные перемещения и можно осуществлять передачу перемещения без потерь.
Изобретение не ограничивается вышеописанными примерами осуществления оно может быть изменено и модифицировано в разнообразных областях применения.
В рычажном устройстве со свободно перемещающейся опорой в соответствии с изобретением рычаг лежит на подвижной опоре, и диапазон движения средства для взаимодействия элементов рычага с приводящим органом, связанного с рычагом, средства для взаимодействия элементов рычага с исполнительным органом можно значительно увеличить.
В прессе рычаг, лежащий на опоре, используется для систематического и правильного выполнения операции обжатия путем сообщения головкам движения, необходимого для обжатия.
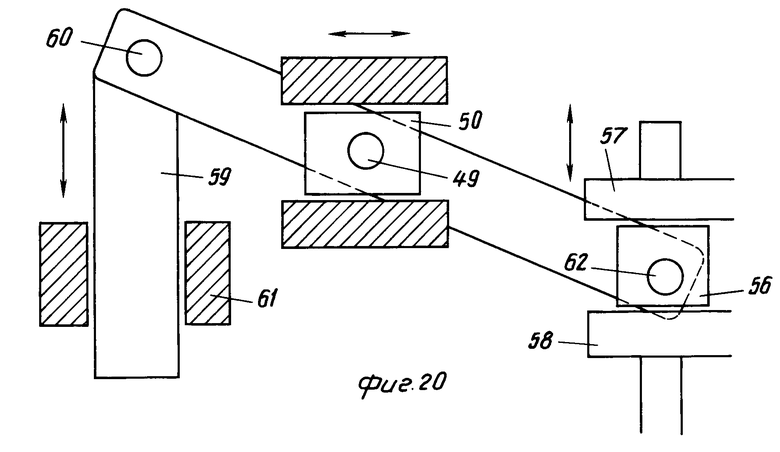
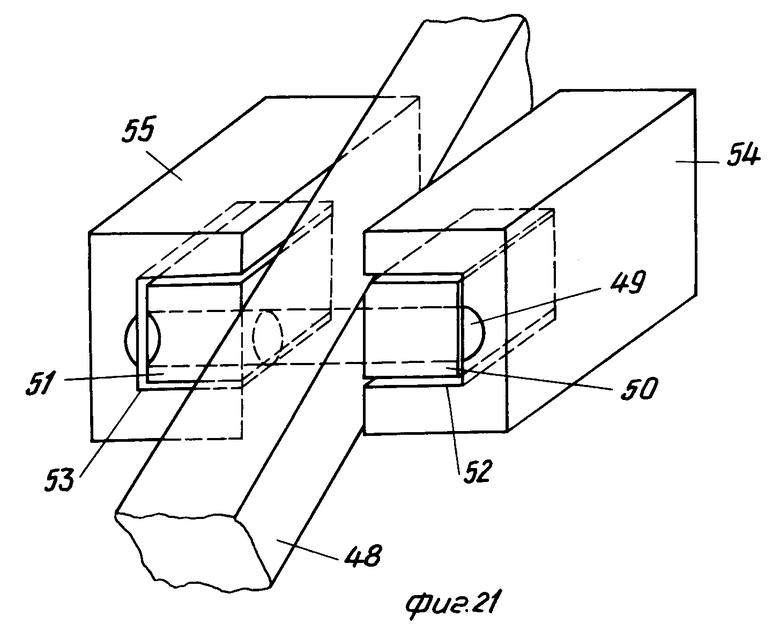
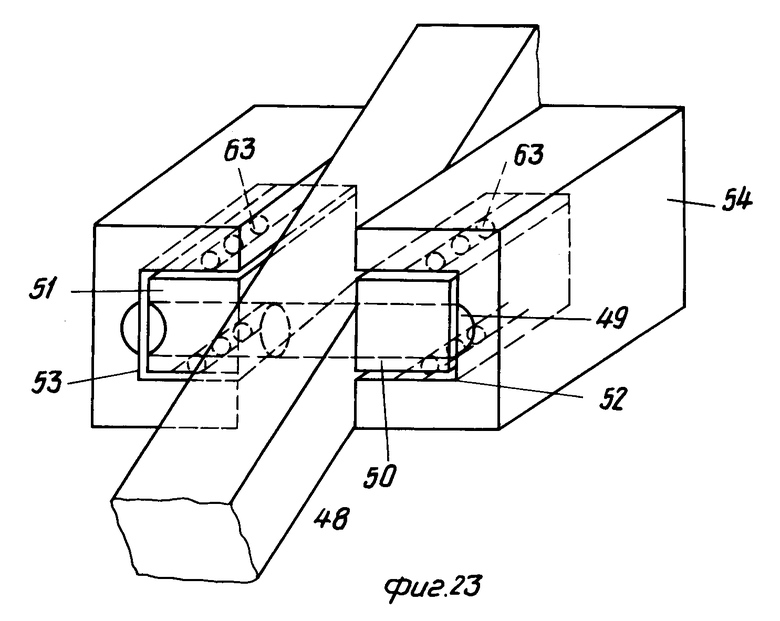
В рычажном устройстве, используемом в прессе, изображенном на фиг.14, опорные ролики 30, установленные на опорной оси 29, катятся в направляющих канавках 32, тем самым образуя свободно движущуюся опору. В конструкции, изображенной на фиг.20 и 21 и не содержащей опорный ролик, рычажный элемент 48 качается на опорной оси 49, вставленной в отверстия, выполненные в ползушках 50 и 51, вставленных в направляющие канавки 52 и 53, выполненные в направляющих элементах 54 и 55 регулятора со свободно движущейся опорой. Один конец рычажного элемента 48 связан с ползушкой 5 так же, как ось 49 опорной точки.
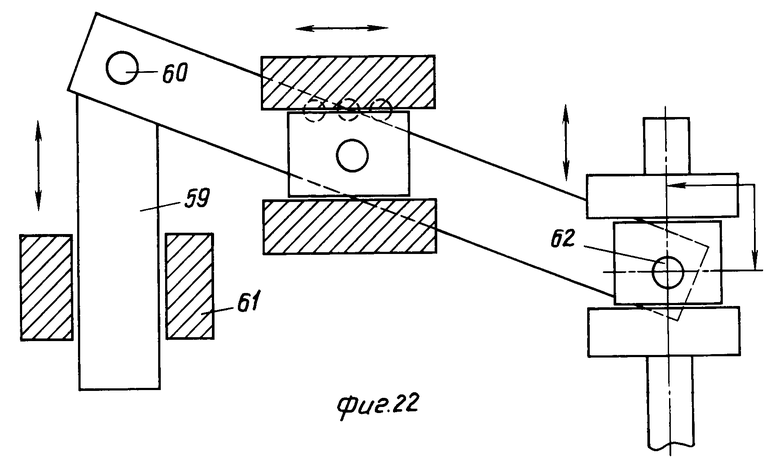
Ползушка 56 вставлена со скольжением между направляющими элементами 57 и 58 регулятора точки приложения силы (средства для взаимодействия элементов рычага с приводящим органом). Другой конец рычажного элемента 48 связан с элементом 59 рабочей точки через ось 60 для взаимодействия с исполнительным органом. Элемент 59 рабочей точки вставлен в направляющий элемент 61 регулятора рабочей точки, зафиксированный на основании, и отрегулирован на совершение прямолинейного движения. В этом случае наружные поверхности ползушек 50 и 56 отшлифованы с большой точностью, а внутренние поверхности направляющих канавок 52, 53, 57 и 58 отполированы, чтобы уменьшить силы трения, и не создают практических проблем. В частности, как показано на фиг.22, поскольку сила, передаваемая на ось 62, всегда передается перпендикулярно, то не возникает напряжения кручения.
Однако, чтобы сделать плавными движения ползушек 50, 51 и 56, между направляющими канавками 52 и 53 и ползушками 50 и 51 можно вставить множество шарикоподшипников 63, как показано на фиг.22 и 23. Вместо шарикоподшипников могут использоваться роликоподшипники.
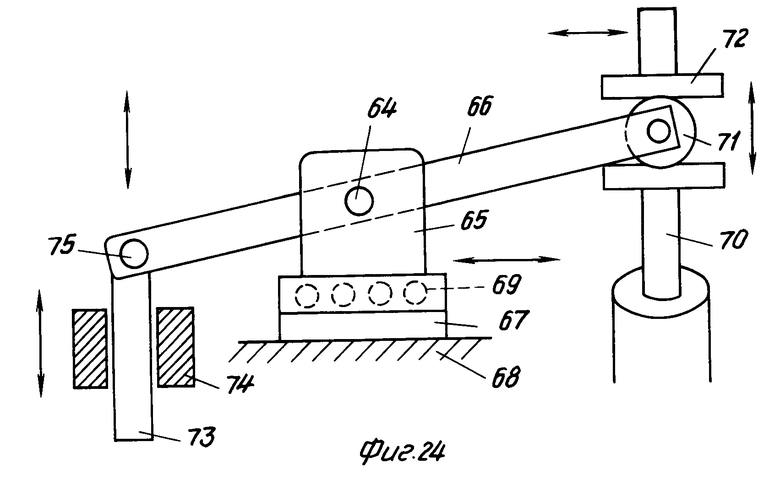
На фиг. 24 и 25 изображены конструкции со свободно подвижной опорой. На фиг. 24 опорная ось 64 установлена на опорном элементе 65, а на опорной оси 64 качается рычажный элемент 56. Опорный элемент 65 посажен в несущую канавку, выполненную на подушке 67, фиксированной на основании 68. Опорный элемент 65 может двигаться на шарикоподшипниках 69, вставленных между опорным элементом 65 и несущей канавкой в направлении, указанном стрелкой. Один конец рычажного элемента 66 соединен с ведущим валом 70 через соединительный элемент типа кулачкового повторителя, имеющий ролик 71, вставленный между направляющими пластинами 72 регулятора точки приложения силы. Другой конец рычажного элемента 66 соединен с кулисным штоком 73, опирающимся на регулятор 74 рабочей точки через ось 75. В подвижной опоре, выполненной в соответствии с вышеописанным, опорная ось 64 не движется, а опорный элемент 65 свободно перемещается в подшипниках 69.
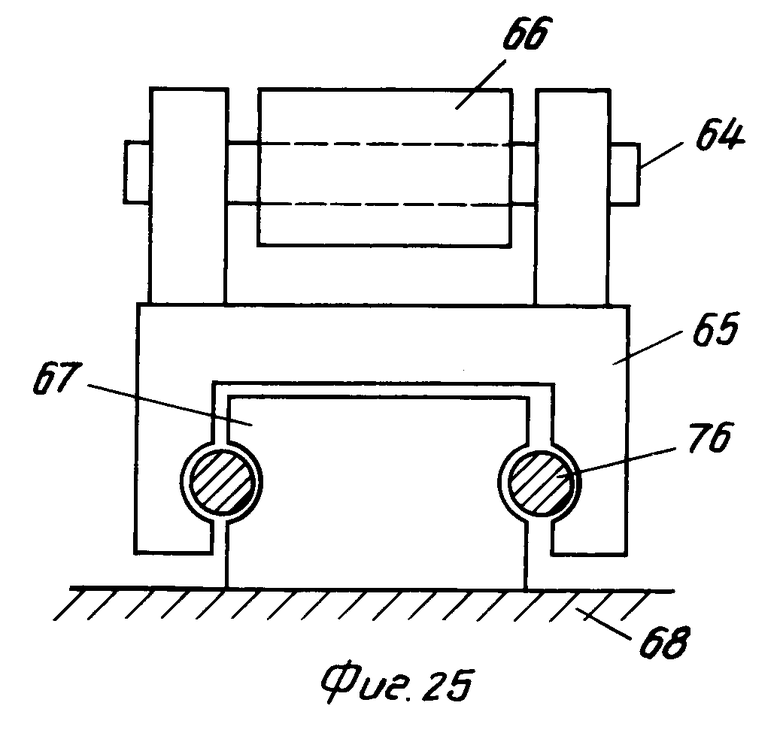
На фиг.25 рычажный элемент 66, качающийся на опорной оси 64, может двигаться в направлении прямолинейных направляющих 76 на опорном элементе 65, помещенном на подушку 67, зафиксированную на основании 68, на направляющих 76, образуя свободно перемещающуюся опору.
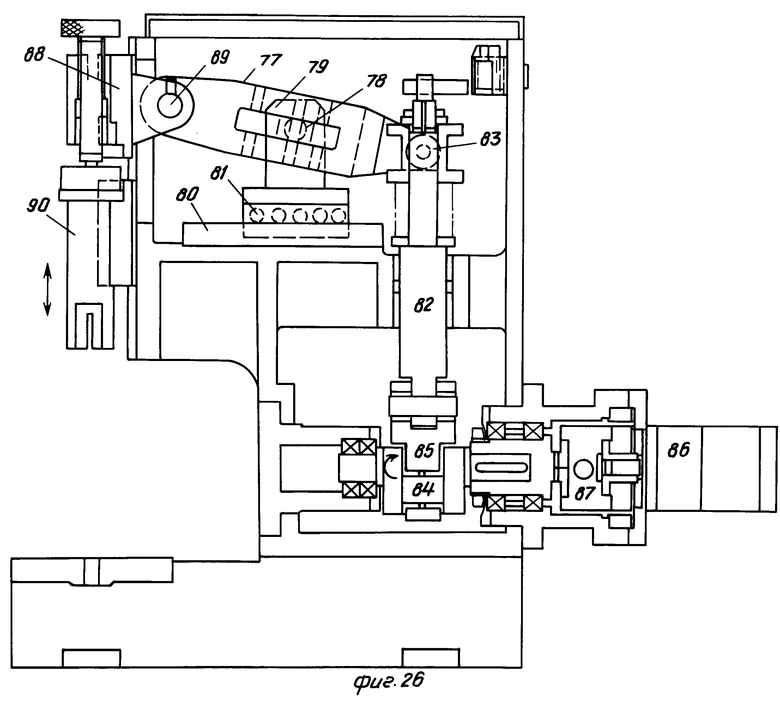
На фиг.26 изображен пресс, имеющий рычажное устройство с опорой, конструкция которого изображена на фиг.24. Этот пресс имеет практически такую же конструктивную схему, что и пресс, изображенный на фиг.11 и 12, но отличается конструкцией подвижной опоры рычажного устройства. В прессе, изображенном на фиг.11, рычаг 28 качается на опорой оси 29 на роликах 30, которые катятся в опорных канавках 32, выполненных в опорном элементе 31. В прессе, изображенном на фиг. 26, конструкция опоры рычажного устройства идентична изображенной на фиг. 24. Рычажный элемент 77 качается на опорной оси 78 на опорном элементе 79. Опорный элемент 79 является свободно перемещающимся и удерживается в главном корпусе 80 при помощи шарикоподшипников 81.
Один конец рычажного элемента 77 соединен с вертикальным приводным валом 82 через конструкцию 83 кулачкового повторителя, которая служит точкой приложения силы. Нижний конец вертикального приводного вала 82 соединен с эксцентриковым валом 84 через кривошипный механизм 85. При вращении эксцентрикового вала 84 вертикальный приводной вал 82 движется по вертикали. Один конец эксцентрикового вала 84 соединен с электродвигателем 86 через механизм 87 силовой трансмиссии, такой как редуктор, и приводится во вращение.
Другой конец рычажного элемента 77 соединен с подъемным элементом 88 через вал 89, служащий рабочей точкой, и головка 90, установленная на подъемном элементе 88, приводится в движение по вертикали, как показано на фиг. 26. В этом осуществлении вращающий момент электродвигателя 86 передается на рычажное устройство через каждый кулисный механизм. Нет необходимости в элементах типа маховика. Устройство может быть выполнено малогабаритным, и в то же время на головку 90 через рычажное устройство, имеющее свободно перемещающуюся опору, может плавно передаваться механическое усилие.
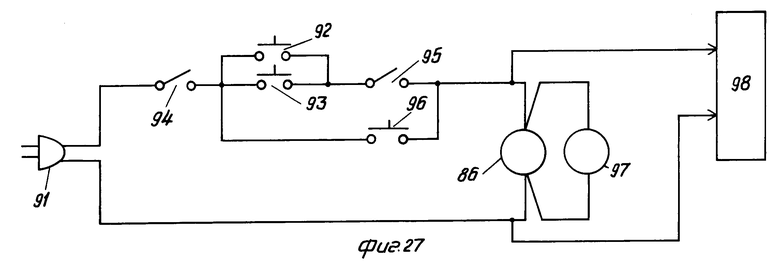
Фиг.27 представляет собой схему питания и управления прессом, изображенным на фиг.26. Как показано на фиг.27, одна клемма источника 91 переменного тока соединена с одной клеммой параллельной схемы временного переключателя 92 и ножного переключателя 93 через тумблер 94 питания. Другая клемма этой параллельной цепи соединена с одной клеммой двигателя 86 через переключатель 95 задания малого перемещения. Тумблер 94 питания соединен с одной клеммой двигателя 86 через переключатель 96 малого перемещения. Двигатель 86 соединен параллельно с тормозом 97. Временной переключатель 92 используется для остановки головки 90 в верхнем положении после того, как она переместилась вниз, а затем вверх до завершения заранее заданной работы. Временной переключатель 92 представляет собой, например, предельный выключатель, установленный в верхнем предельном положении подъемного элемента 88. Переключатель 92 остается выключенным только в этом верхнем предельном положении. Нормальное положение переключателя 95 задания малого перемещения включенное. Переключатель 95 задания малого перемещения выключается для того, чтобы немного переместить головку 90. В результате двигатель 86 может быть свободно включен для малого перемещения головки вне зависимости от состояний включено-выключено переключателей 92 и 93. Имеется счетчик 98, предназначенный для счета числа рабочих циклов двигателя 86, т.е. числа циклов операции обжатия головки 90, если это необходимо.
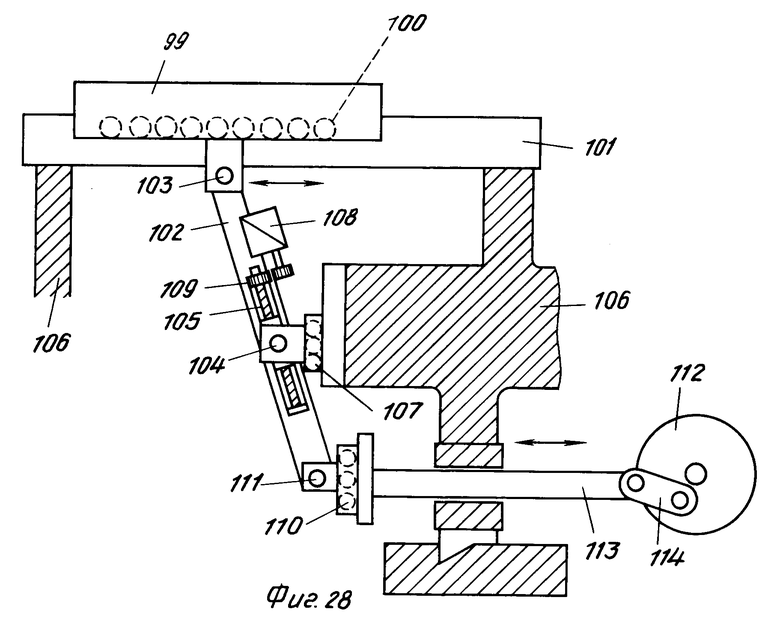
На фиг.28 представлено использование изобретения применительно к плоскошлифовальному станку, в котором в качестве подвижной опоры служит опорная точка с регулируемым ходом. Головка 99 сидит в подшипниках 100, что позволяет ей плавно двигаться по опорному элементу 101 по горизонтальной плоскости. Нижняя часть головки 99 через ось опирается у одного конца рычажного элемента 102 на шток 103, служащий рабочей точкой. Рычажный элемент 102 соединен с опорным элементом 104, связанным с резьбовым стержнем 105. Опорный элемент 104 установлен с возможностью перемещения и поворота на основании 106 через механизм 107 направляющих качения. Резьбовой стержень 105 соединен с вращающимся валом двигателя 108, установленного на рычажном элементе 102 через зубчатую передачу 109. Наружный конец рычажного элемента 102 соединен с механизмом 110 направляющих качения через ось 111, служащую точкой приложения силы. Механизм 110 направляющих качения соединен с сервомотором 112 через кривошипный вал 113 и кривошипный механизм 114.
В описанной конструкции момент вращения сервомотора 112 преобразуется в прямолинейное движение через механизмы 113 и 114, и прямолинейное движение передается на ось 111, служащую точкой приложения силы рычажного элемента 102. Поэтому рычажный элемент 102 опирается на опорный элемент 104 и механизм 107 направляющих качения и поворачивается таким образом, что головка 99 может плавно перемещаться в горизонтальном направлении. В этом случае, когда двигатель 108 приводится во вращение, резьбовой стержень 105 приводится во вращение через зубчатую передачу 109 и опорная ось 104 свободно перемещается по направляющей 107 качения, изменяя расстояние между осями 103 и 111, изменяя тем самым ход головки 99.
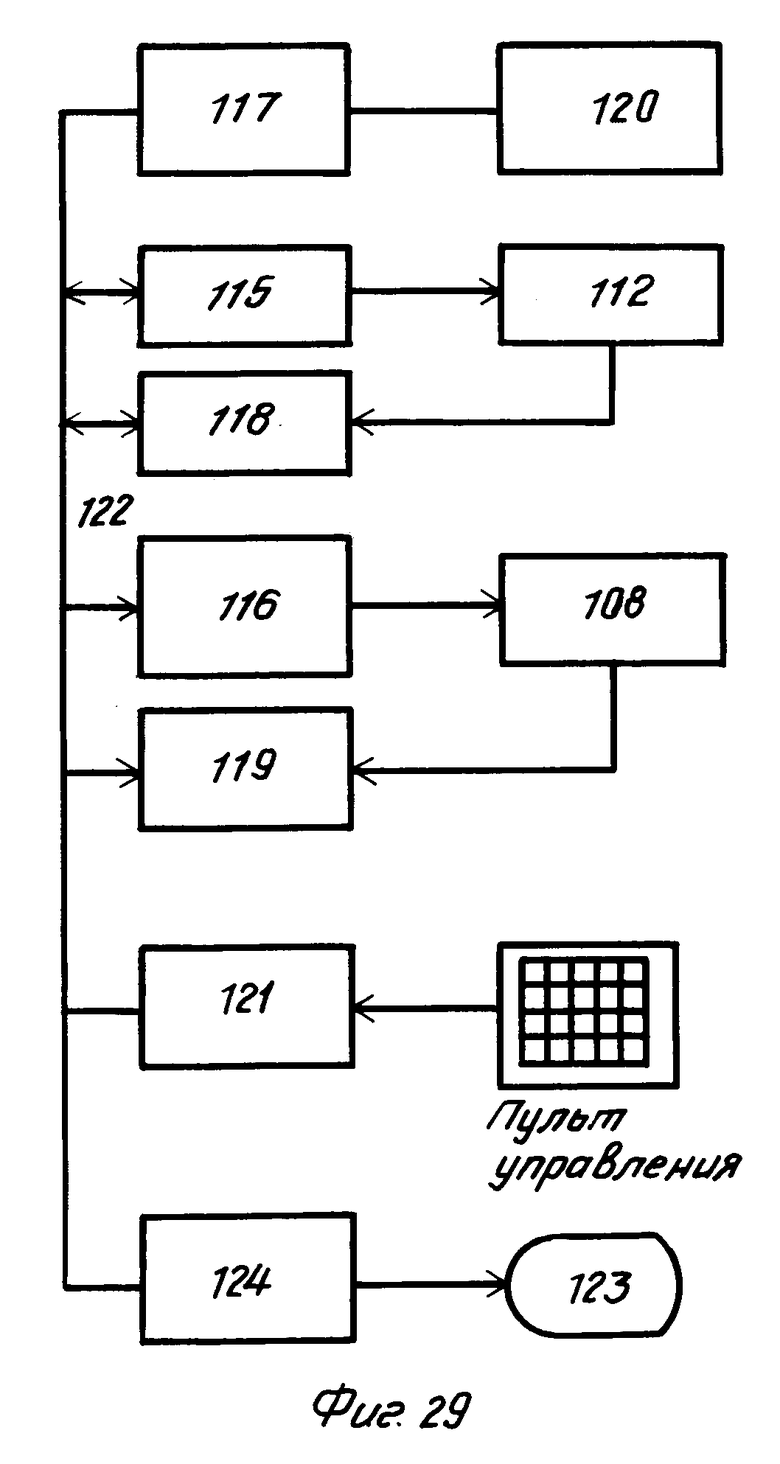
Фиг. 29 представляет собой блок-схему электрической системы управления плоскошлифовальным станком, изображенным на фиг.28. Сервомотор 112 и тормозной двигатель 108 приводятся в действие выходными сигналами со схемы 115 сигнала управления серводвигателем и со схемы 116 сигнала двигателя переменного торможения подвижной опорной точки, которые управляются центральным процесором 117. Скорость сервомотора 112 детектируется кодером 118 входного сигнала сервомотора, и сигнал детектирования поступает в процессор 117. Состояние вращения тормозного двигателя 108 детектируется кодером 119, и сигнал детектирования поступает в процессор 117.
Центральный процессор 117 соединен с ПЗУ/ОЗУ 120, в памяти хранятся программы всей системы, а также входные данные. Выходной сигнал с консоли управления через клавиатурный интерфейс 121 выдается в центральный процессор 117 через шину 122. Различные типы данных, хранящихся в ОЗУ 120, поступают с центрального процессора 117 на ЭЛТ 123 через выходной интерфейс 124 индикации и индицируются на ЭЛТ 123.
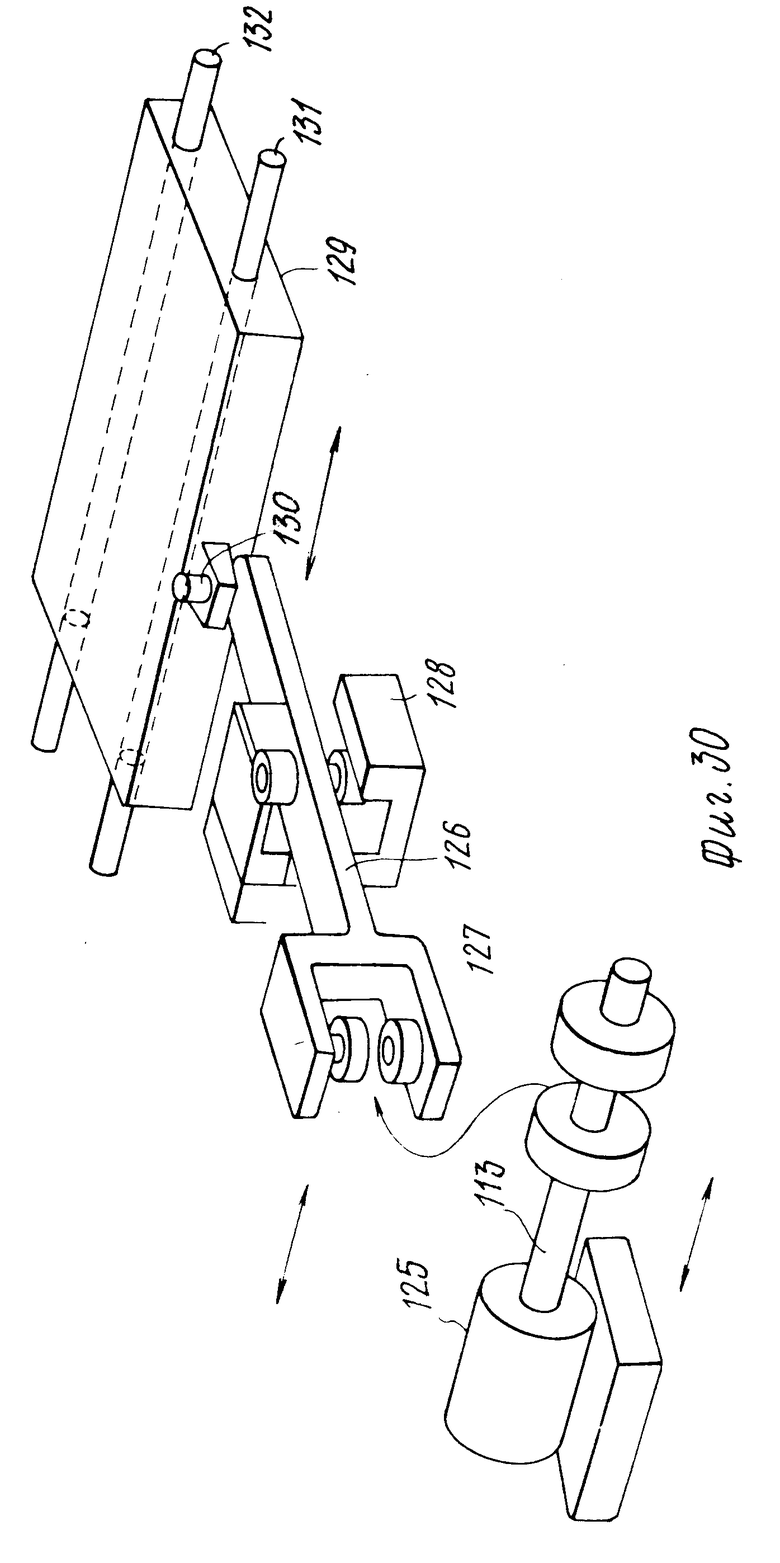
На фиг. 30 изображен демпфер колебаний здания, в котором применяется предложенное рычажное устройство. Кривошипный вал 113, идентичный изображенному на фиг. 28, соединен с кривошипным механизмом и серводвигателем (не показаны) через осевой опорный элемент 125. Один конец, т.е. со стороны точки приложения силы, рычажного элемента 126 соединен с одним концом кривошипного вала 113 через механизм 127 кулачкового повторителя. В средней части рычажного элемента 126 выполнена опора 128 механизма кулачкового повторителя. Другой конец, служащий рабочей точкой, соединен с демпфирующим блоком 129 через палец 130. Демпфирующий блок 129 удерживается с возможностью перемещения на прямолинейных направляющих 131 и 132. Прямолинейные направляющие 131 и 132 зафиксированы в точках здания, имеющих максимальную амплитуду во время землетрясения, например на среднем этаже небоскреба.
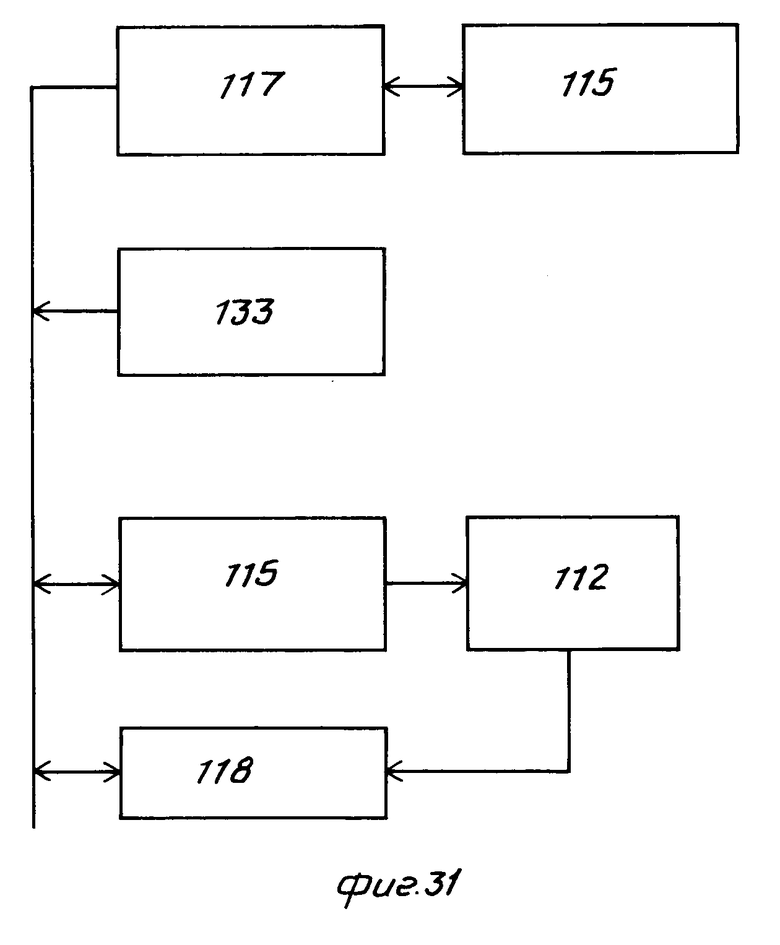
На фиг.31 иллюстрируется работа демпфирующего устройства. При колебаниях здания во время землетрясения колебания детектируются датчиком 133 колебаний и данные об амплитуде и направлении колебаний поступают в центральный процессор 117. Центральный процессор посылает запускающий сигнал на серводвигатель 112 через схему 115 управления серводвигателем так же, как на фиг.28, чтобы заставить демпфирующий блок 129 двигаться в противоположном направлении с такой же амплитудой, чтобы погасить колебания здания. Величина перемещения демпфирующего блока детектируется кодером 118 в виде угла и направления вращения серводвигателя 112.
Колебания во время землетрясения обычно происходят с частотой несколько колебаний в секунду. Нетрудно перемещать демпфирующий блок 129 с такой скоростью. В обычном демпфирующем устройстве демпфирующий блок 129 приводится в движение при помощи ходового винта, и скорость реагирования низка. Кроме того, поскольку блок 129 очень массивен, механическая прочность ходового винта недостаточна. В результате невозможно добиться достаточно большого эффекта демпфирования. Хороший результат можно получить, используя комбинацию предложенного рычажного устройства, имеющего свободно движущуюся опору и прямолинейные направляющие 131 и 132.
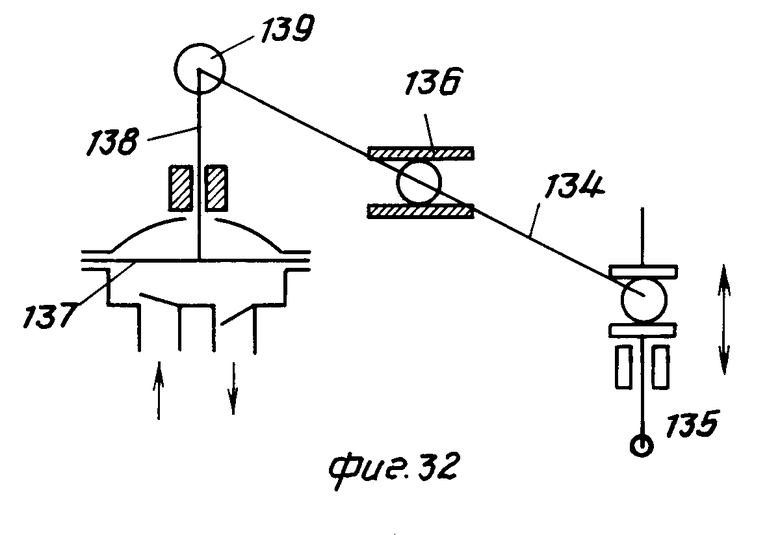
На фиг.32 представлен пример, в котором предложенное рычажное устройство используется в механизме привода диафрагменного насоса. Рычажный элемент 134, который воспринимает поворотное усилие с регулятора 135 точки приложения силы с кулачковым повторителем в направлении стрелки, поворачивается относительно опоры 136. Диафрагма 137 диафрагменного насоса перемещается в вертикальном направлении через регулятор 138 рабочей точки, соединенный с рабочей точкой 139.
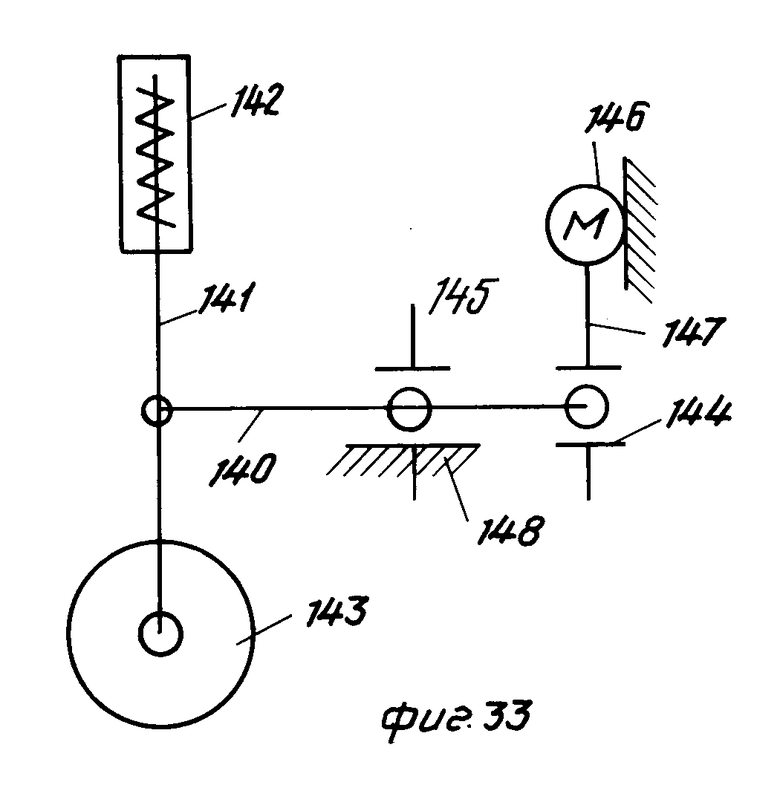
На фиг.33 представлен пример, в котором рычажное устройство, выполненное в соответствии с изобретением, используется в автомобильном амортизаторе. Как показано на фиг.33, рабочая точка рычажного элемента 140 опирается с возможностью поворота на кулису 141 для соединения автомобильного амортизатора 142 с колесом 143 автомобиля. Рычажный элемент 140 соединен с регулятором 144 точки приложения силы через свободно движущуюся опору 145. Регулятор 144 точки приложения силы соединен с сервомотором 146 через вал 147 кривошипа так же, как и в демпфирующем устройстве, изображенном на фиг.30. Опора 145 и сервомотор 146 фиксированы на корпусе 148 автомобиля.
Принцип работы автомобильного амортизатора практически не отличается от принципа демпфирования здания. Привод от двигателя конструкции, изображенной на фиг.31, осуществляется для эффективного поглощения вибраций автомобиля.
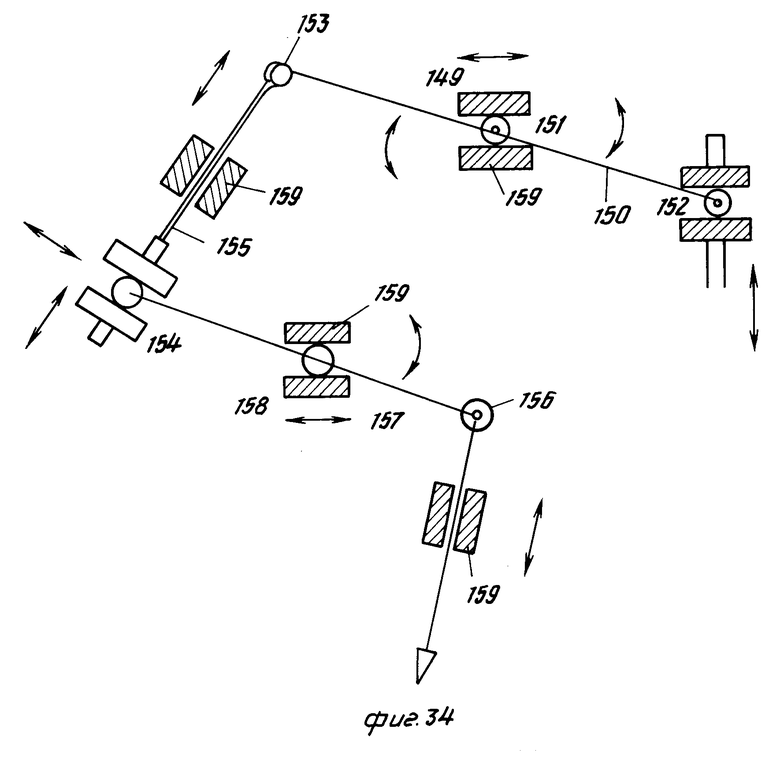
В каждом из вышеописанных примеров используется только одно рычажное устройство в соответствии с изобретением. Однако можно комбинировать два и более рычажных устройств для получения системы передачи усилия, как показано на фиг.34. Первое рычажное устройство 149 имеет рычажный элемент 150, опирающийся на опору 151, и сила, действующая на первую точку 152 приложения силы, передается с первой рабочей точки 153 на второй регулятор 154 точки приложения силы через тягу 155. Усилие, передаваемое на второй регулятор 154 точки приложения силы, передается на второй регулятор 156 рабочей точки через опору 157 второго рычажного устройства 158. Все опорные части 159 изображены в виде основания. Две и более опоры используются для составления системы из цепочки рычажных устройств для свободного задания направления передачи усилия.
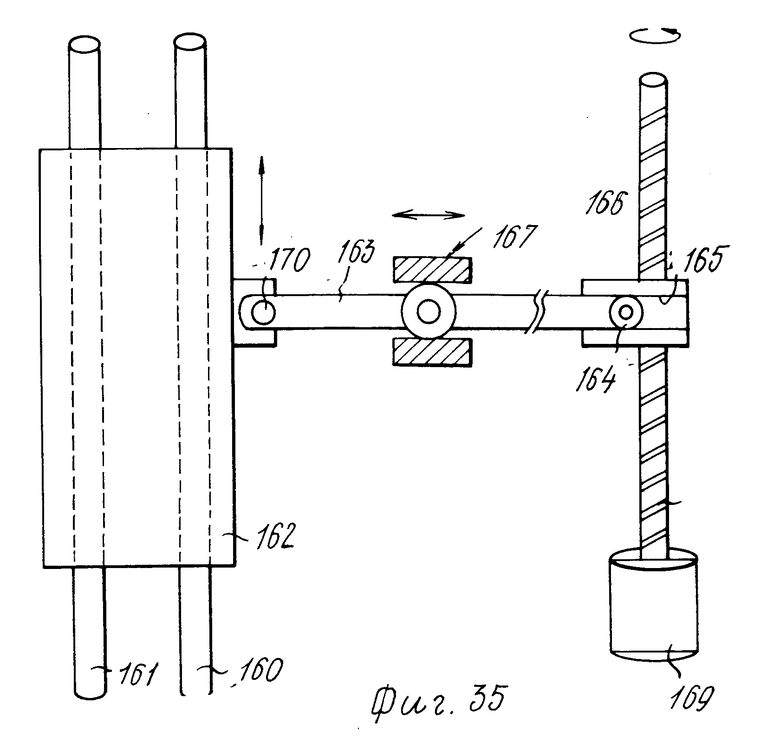
На фиг.35 представлен пример применения двухкоординатного стола с использованием поворотного рычажного устройства в соответствии с изобретением. В этой конструкции стол можно помешать по направляющим 160 и 161 в направлении Х. Конструкция и работа в направлении Y может быть реализована так же, как и в направлении Х, и поэтому не показана. Стол 162 лежит осью на одном конце рычажного элемента 163 через шток, приводимый в действие как рабочая точка. Ролик 164 в ведущем направляющем элементе 165, служащем в качестве точки приложения силы механизма 166 шарикового ходового винта, установлен на одном конце рычажного элемента 163 через опору 167. Направляющий элемент 165 находится в резьбовом соединении с шариковым ходовым винтом 168, вращаемым двигателем 169.
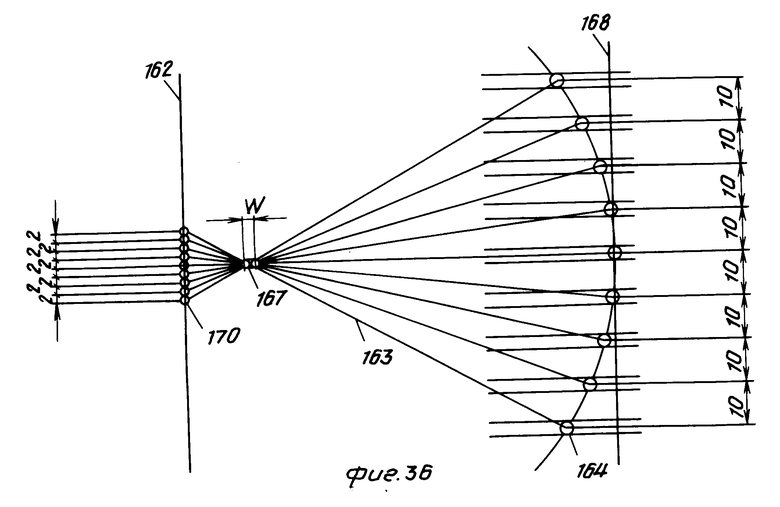
На фиг. 36 изображена траектория движения каждой части, изображенной на фиг.35. Когда осуществляется подача шарикового ходового винта 168, например, на каждые 10 мкм, рабочая точка 170, т.е. стол 165, перемещается на каждые 2 мкм. Ролик 164, служащий точкой приложения силы, перемещается в направляющем элементе 165 и имеет дуговую траекторию. Опора 167 свободно перемещается на W в ответ на подачу шарикового ходового винта 168 на 80 мкм. Рабочая точка 170 перемещается на 80/5 16 мкм.
Когда двухкоординатный стол имеет описанную конструкцию, стол 162 движется с очень большой точностью. Двухкоординатный стол может использоваться в устройстве экспонирования полупроводниковых плат.

Изобретение относится к машиностроению, а именно к рычажному устройству с подвижной опорой и к прессу, в котором оно используется. Сущность: в рычажном устройстве с подвижной опорой для оси качания рычага эта опора установлена с возможностью свободного перемещения, связь между осью качания рычага и рычагом выполнена с фиксацией от их взаимного относительного поступательного перемещения в плоскости качания рычага и с обеспечением возможности поступательного движения рычага одновременно с его качательным движением при перемещении опоры в процессе работы. 2 с. и 2 з.п. ф-лы, 36 ил.
| Механический пресс | 1981 |
|
SU996226A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
