Предпосылки изобретения
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к выдвижному воздушному выключателю, более конкретно, к содержащемуся в выдвижном воздушном выключателе, который может перемещаться в три положения, то есть в нерабочее положение, контрольное положение и замкнутое положение, устройству автоматического подключения управляющего терминала, которое способно автоматически соединять управляющий терминал, установленный в основном корпусе, и управляющий терминал, установленный в раме, друг с другом в контрольном положении и замкнутом положении и автоматически отсоединять терминалы друг от друга в нерабочем положении, и к содержащему его воздушному выключателю.
2. Описание известного уровня техники
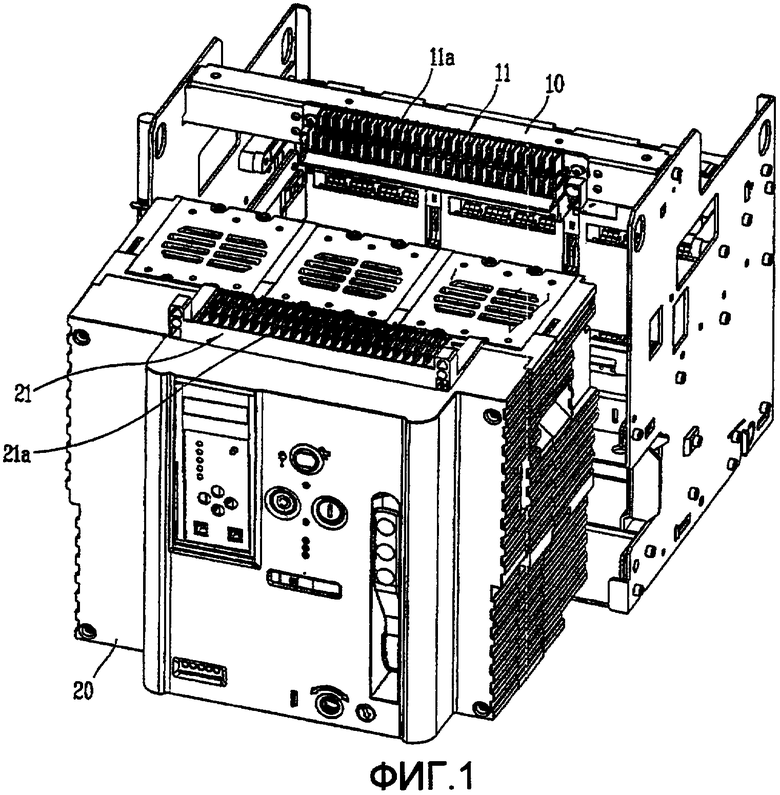
На фиг.1 изображен вид в перспективе, показывающий целиком внешний вид выдвижного воздушного выключателя, соответствующего известному уровню техники.
Как показано на фиг.1, соответствующий известному уровню техники выдвижной воздушный выключатель включает раму 10 и основной корпус 20.
Рама 10 снабжена электрическим контактом (не показан) для соединения с электрической нагрузкой и источником энергии в цепи. И основной корпус 20 снабжен соответствующим электрическим контактом (не показан), соединяемым с электрическим контактом рамы 10 или отключаемым от него. Основной корпус 20 может перемещаться во втянутое положение для соединения с электрическим контактом рамы 10 и выдвинутое положение для отключения от него.
Рама 10 имеет верхнюю часть, снабженную управляющим терминалом 11, установленным в раме 10 в направлении ширины. Управляющий терминал 11 снабжен множеством соединительных штырьков 11a, имеющих заданную длину. Множество соединительных штырьков 11a отнесены друг от друга с постоянным интервалом между ними. Здесь и согласно настоящему изобретению, и согласно известному уровню техники управляющий терминал включает контакт для ввода управляющего сигнала в контроллер (так называемое реле максимального тока, сокращенно OCR) воздушного выключателя, контакт для передачи выходного сигнала от контроллера и контакт для подключения источника энергии к контроллеру.
Основной корпус 20 имеет верхнюю часть, снабженную управляющим терминалом 21, вставленным в управляющий терминал 11 рамы 10 и, таким образом, электрически соединенный с ним. Управляющий терминал 21 снабжен множеством соединительных штырьков 21a, имеющих заданную длину. Множество соединительных штырьков 21a отнесены друг от друга с постоянным интервалом между ними.
С такой конфигурацией, при соединении электрического контакта основного корпуса 20 и электрического контакта рамы 10 друг с другом, управляющий терминал 11 рамы 10 и управляющий терминал 21 основного корпуса 20 перемещаются в направлении, аналогичном направлению перемещения (назад на фиг.1) для соединения основного корпуса 20. Соответственно, соединительные штырьки 11a, 21a входит в зацепление друг с другом, таким образом, электрически соединяясь друг с другом.
Однако в выдвижном воздушном выключателе, соответствующем известному уровню техники, поскольку управляющий терминал 11, установленный на раме 10, и управляющий терминал 21, установленный в основном корпусе 20, соединены друг с другом в направлении, аналогичном направлению для соединения основного корпуса 20, нагрузка основного корпуса 20 передается управляющему терминалу 11 рамы через управляющий терминал 21 без амортизации. Соответственно, управляющие терминалы 11, 21 могут быть повреждены.
Кроме того, когда управляющий терминал 21 полностью не соединен с управляющим терминалом 11 рамы 10 в результате того, что выключатель недостаточно перемещен, может быть осуществлено дефектное соединение. Соответственно, может быть невозможно управлять воздушным выключателем.
Кроме того, так как соединительные штырьки 11a, 21a управляющих терминалов 11, 21 открыты наружу, могут произойти несчастные случаи при обращении с электричеством, такие как замыкания на землю и поражение электрическим током. И когда соединительные штырьки 11a, 21a повреждены внешним соударением или когда их поверхности загрязнены посторонними примесями, может быть осуществлено дефектное соединение.
Кроме того, в случае с электропроводкой для управляющих терминалов 11, 21, соответствующих известному уровню техники, требуется паять множество проводов, соответствующих соединительным штырькам 11a, 21a одного за другим на задней стороне множества соединительных штырьков 11a, 21a. Соответственно, требуется продолжительное время для процесса монтажа проводки, что приводит к низкой производительности и, таким образом, увеличивает стоимость производства.
Кроме того, управляющие терминалы 11, 21, соответствующие известному уровню техники, соответственно, снабжаются контактом для ввода управляющего сигнала, контактом для передачи выходного сигнала от контроллера и контактом для подключения источника энергии к контроллеру, которые имеют одинаковую форму и, следовательно, расположены с постоянным интервалом между ними. Соответственно, нелегко отличать контакты друг от друга и выполнять процесс соответствующего им монтажа.
Кроме того, управляющие терминалы 11, 21, соответствующие известному уровню техники, соответственно, имеют контакты для ввода управляющего сигнала в контроллер, передачи выходного сигнала от контроллера и подключения источника энергии к контроллеру, и эти контакты сформированы как единое целое. Таким образом, каждая длина управляющих терминалов 11, 21 очень велика и уникальна, как показано на фиг.1, и, соответственно, изготовление форм для управляющих терминалов 11, 21 может быть очень дорогим.
Сущность изобретения
Таким образом, первым объектом настоящего изобретения является получение устройства автоматического подключения управляющего терминала для воздушного выключателя, которое способно втягивать основной корпус в раму в соединенном положении, в котором электрический контакт основного корпуса и электрический контакт рамы, соединенной с нагрузкой и мощностью в цепи, соединены друг с другом, выдвигать основной корпус из рамы в нерабочем положении, в котором электрические контакты отключены друг от друга, или автоматически и надежно выполнять соединение и размыкание между управляющими терминалами основного корпуса и рамы и предотвращать приложение чрезмерной нагрузки к управляющим терминалам, и имеющего его воздушного выключателя.
Вторым объектом настоящего изобретения является получение устройства автоматического подключения управляющего терминала для воздушного выключателя, которое способно усиливать вращающий момент, необходимый для соединения электрического контакта основного корпуса и электрического контакта рамы друг с другом, и имеющего его воздушного выключателя.
Третьим объектом настоящего изобретения является получение устройства автоматического подключения управляющего терминала для воздушного выключателя, которое способно минимизировать несчастные случаи при обращении с электричеством, такие как замыкание на землю и поражение электрическим током, посредством минимизации открытости проводящих частей управляющих терминалов, и имеющего его воздушного выключателя.
Четвертым объектом настоящего изобретения является получение устройства автоматического подключения управляющего терминала для воздушного выключателя, которое способно увеличивать производительность монтажа электропроводки для управляющих терминалов и, таким образом, сокращать стоимость производства воздушного выключателя, и имеющего его воздушного выключателя.
Пятым объектом настоящего изобретения является получение устройства автоматического подключения управляющего терминала для воздушного выключателя, которое способно минимизировать возможность неправильного монтажа электропроводки для управляющих терминалов и обеспечивать удобное осуществление процесса монтажа электропроводки, и имеющего его воздушного выключателя.
Шестым объектом настоящего изобретения является получение устройства автоматического подключения управляющего терминала для воздушного выключателя, которое способно решительно сокращать стоимость производства, поскольку не требуются формы для изготовления управляющих терминалов, и имеющего его воздушного выключателя.
Для достижения этих и других преимуществ и в соответствии с целью настоящего изобретения, как воплощено и в общих чертах описано здесь, во-первых, получено устройство автоматического подключения управляющего терминала для воздушного выключателя в воздушном выключателе, содержащем раму, электрически соединенную с электрической нагрузкой и источником энергии в цепи, и основной корпус, который может перемещаться в замкнутое положение, в котором основной корпус электрически соединен с рамой, контрольное положение, в котором основной корпус электрически отключен от рамы, но источник энергии управления подключен и осуществляется ввод-вывод сигналов, и в нерабочее положение, в котором основной корпус электрически отключен от рамы, источник энергии управления не подключен и ввод-вывод сигналов не осуществляется, причем устройство автоматического подключения управляющего терминала содержит: шпиндель, снабженный резьбовой частью и вращающийся вручную, будучи соединенным с рычагом управления; подвижную пластину, соединенную со снабженной резьбой частью шпинделя при помощи резьбы, для совершения возвратно-поступательного движения по снабженной резьбой части вращающегося шпинделя; реечную передачу, установленную на верхней поверхности подвижной пластины, для совершения возвратно-поступательного движения вместе с возвратно-поступательным движением подвижной пластины; шестерню, установленную в соответствующих положениях основного корпуса, для зацепления с реечной передачей и, таким образом, вращения согласно возвратно-поступательному движению реечной передачи; кулачок, снабженный зубчатой частью, которая зацепляется с шестерней, и, таким образом, вращающийся для передачи движущей силы вращения от шестерни; рычаг, имеющий одну концевую часть, которая может соединяться с кулачком или отделяться от кулачка, и вращающийся движущей силой вращения, передаваемой от кулачка, когда он соединен с кулачком; штангу, соединенную с рычагом и, таким образом, подвижную в вертикальном направлении согласно вращению рычага; неподвижный модуль управляющего терминала, неподвижно установленный в основном корпусе, и подвижный модуль управляющего терминала, установленный на раме, соединенный со штангой и, таким образом, вертикально подвижный вместе с вертикально перемещающейся штангой и перемещающийся в положение для соединения с неподвижным модулем управляющего терминала основного корпуса и положение для отключения от него.
Второй объект изобретения может быть достигнут посредством получения устройства автоматического подключения управляющего терминала, соответствующего изобретению, в котором применен кулачок, имеющий зубчатую часть, имеющую радиус, больший, чем радиус шестерен, для усиления вращающего момента от шестерен с передаточным отношением шестерен, для горизонтального перемещения основного корпуса в соединенное положение, и имеющего его воздушного выключателя.
Третий объект изобретения может быть достигнут посредством получения устройства автоматического подключения управляющего терминала, соответствующего изобретению, в котором неподвижный модуль управляющего терминала, установленный в основном корпусе, и подвижный модуль управляющего терминала, установленный в раме, включают множество соединителей, в которых установлены электрические контакты и которые, каждый, имеет внешнюю поверхность, закрытую электроизолирующим материалом, и имеющего его воздушного выключателя.
Четвертый объект изобретения может быть достигнут посредством получения устройства автоматического подключения управляющего терминала, в котором управляющие терминалы конфигурированы так, что они имеют строение штырьковых соединителей, и, таким образом, штырьковый соединитель провода и штырьковый соединитель управляющего терминала соединяются друг с другом таким образом, чтобы упрощать процесс монтажа проводки и увеличивать производительность монтажа проводки для управляющего терминала, таким образом, снижая стоимость изготовления воздушного выключателя, и имеющего его воздушного выключателя.
Пятый объект изобретения может быть достигнут посредством получения устройства автоматического подключения управляющего терминала, в котором управляющие терминалы соответственно снабжены соединителем для ввода управляющего сигнала в контроллер, соединителем для вывода управляющего сигнала от контроллера и соединителем для подключения источника энергии к контроллеру согласно функциям, таким образом, чтобы минимизировать возможность неправильного монтажа электропроводки и удобно осуществлять процесс монтажа проводки, и содержащего его воздушного выключателя.
Шестой объект изобретения может быть достигнут посредством получения устройства автоматического подключения управляющего терминала, в котором управляющие терминалы соответственно снабжены обычными (легко доступными на рынке) и короткими соединителями для ввода в управляющий терминал, для вывода от контроллера и для подключения энергии к контроллеру согласно функциям, таким образом, чтобы экономить на стоимости форм для изготовления конкретных управляющих терминалов и, таким образом, решительно снижать стоимость изготовления воздушного выключателя, и содержащего его воздушного выключателя.
Указанные выше и другие цели, признаки, объекты и преимущества настоящего изобретения станут более очевидными при ознакомлении с нижеследующим подробным описанием настоящего изобретения, данным в сочетании с прилагаемыми чертежами.
Краткое описание чертежей
Прилагаемые чертежи, которые даны для лучшего понимания изобретения и включены в это описание и составляют его часть, иллюстрируют предпочтительные варианты осуществления изобретения и вместе с описанием служат для пояснения принципов изобретения.
На чертежах:
фиг.1 - вид в перспективе, показывающий полный внешний вид выдвижного воздушного выключателя, соответствующего известному уровню техники;
фиг.2 - вид в перспективе, показывающий полный внешний вид выдвижного воздушного выключателя, соответствующего одному варианту осуществления настоящего изобретения;
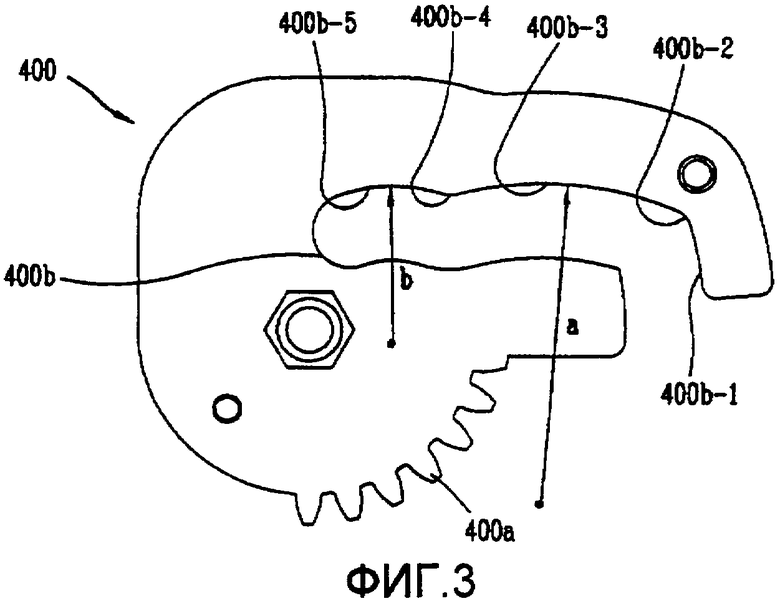
фиг.3 - вид спереди, показывающий детальную конфигурацию кулачка, соответствующего настоящему изобретению;
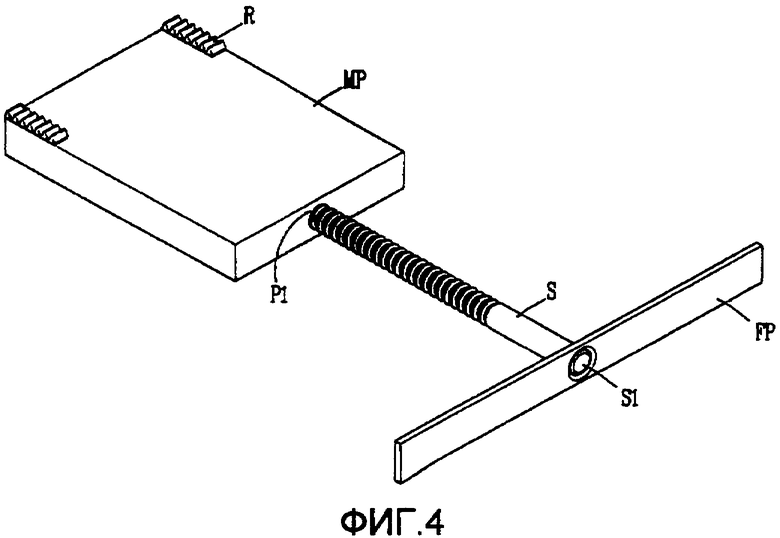
фиг.4 - вид в перспективе, показывающий конфигурацию шпинделя, подвижной пластины и реечных передач, расположенных на подвижной пластине, выдвижного воздушного выключателя, соответствующего настоящему изобретению;
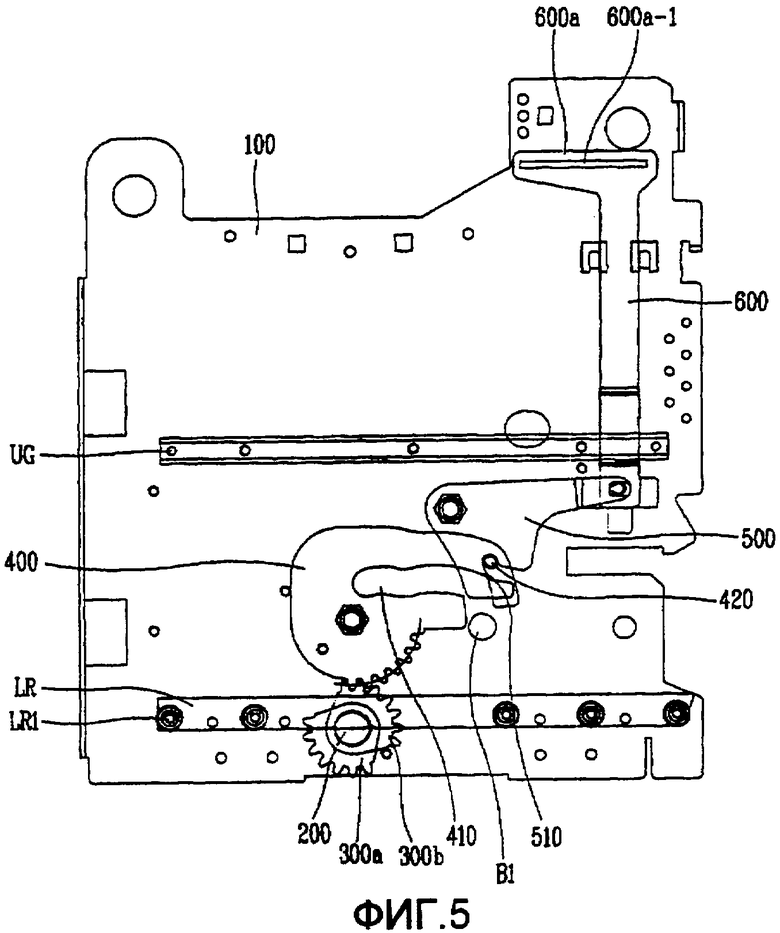
фиг.5 - вид сечения, выполненного по линии II-II на фиг.2, который показывает состояние устройства автоматического подключения управляющего терминала, соответствующего одному варианту осуществления настоящего изобретения, когда выдвижной воздушный выключатель, соответствующий настоящему изобретению, находится в нерабочем положении;
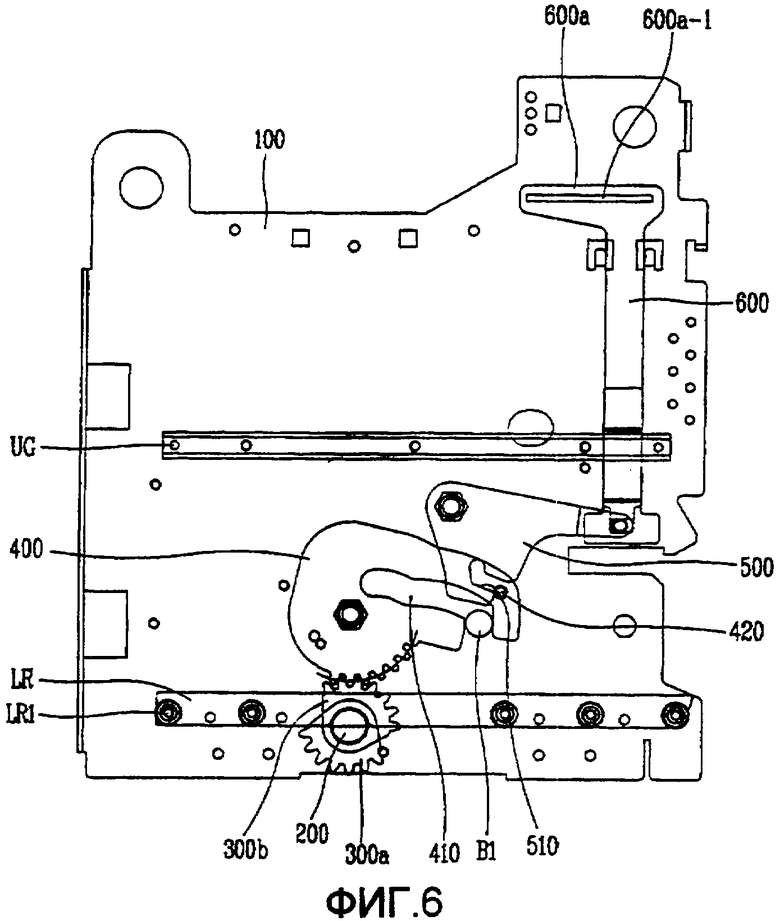
фиг.6 - вид сечения, выполненного по линии II-II на фиг.2, который показывает состояние устройства автоматического подключения управляющего терминала, соответствующее одному варианту осуществления настоящего изобретения, когда выдвижной воздушный выключатель, соответствующий настоящему изобретению, находится в контрольном положении;
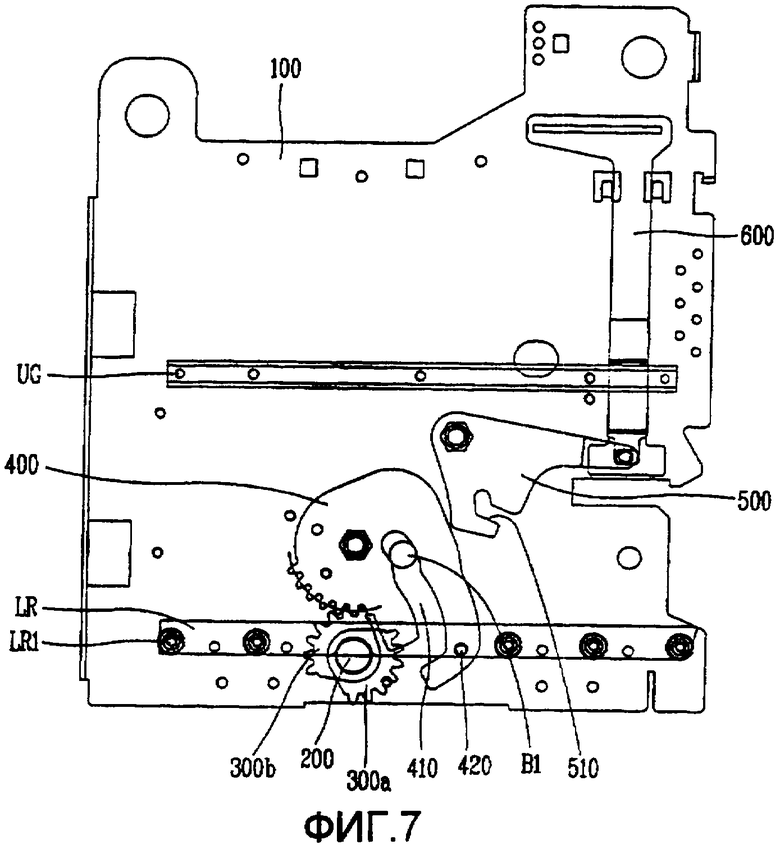
фиг.7 - вид сечения, выполненного по линии II-II на фиг.2, который показывает состояние устройства автоматического подключения управляющего терминала, соответствующего одному варианту осуществления настоящего изобретения, когда выдвижной воздушный выключатель, соответствующий настоящему изобретению, находится в замкнутом положении, и
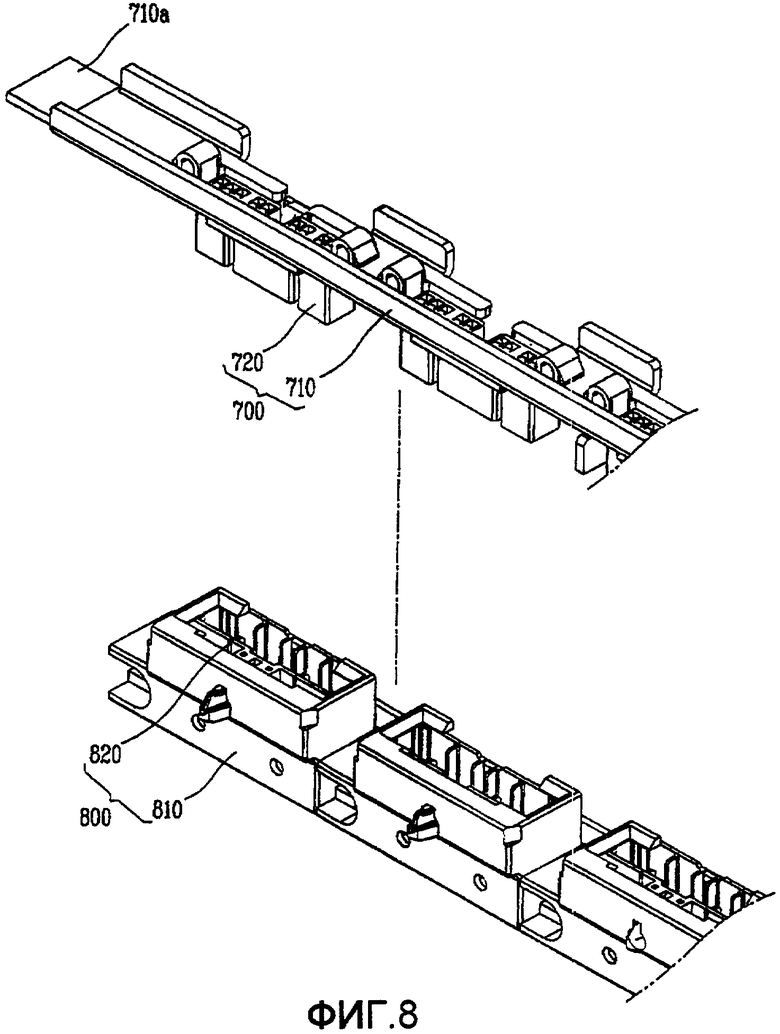
фиг.8 - увеличенный вид в перспективе, показывающий отключенное состояние неподвижного модуля управляющего терминала основного корпуса и подвижного модуля управляющего терминала рамы в устройстве автоматического подключения управляющего терминала, соответствующего одному варианту осуществления настоящего изобретения.
Подробное описание изобретения
Теперь будет дано подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которых показаны на прилагаемых чертежах.
Сначала выдвижной воздушный выключатель будет описан со ссылками на фиг.2 как вид в перспективе, показывающий полный внешний вид выдвижного воздушного выключателя, соответствующего одному варианту осуществления настоящего изобретения.
Как показано на фиг.2, выдвижной воздушный выключатель, соответствующий одному варианту осуществления настоящего изобретения, включает раму (A) и основной корпус (B).
Рама (A) может быть соединена с электрической нагрузкой и источником энергии в цепи через электрический контакт (установленный на задней стороне рамы, но не показанный).
Основной корпус (B) может быть выборочно перемещен в замкнутое положение, в котором основной корпус (B) электрически соединен с рамой (A), в контрольное положение, в котором основной корпус (B) может принимать источник энергии для контроллера и осуществляет ввод-вывод сигналов в контроллер и от него, даже при том, что он электрически отключен от рамы (A), и в нерабочее положение, в котором основной корпус (B) отключен от рамы (A), источник энергии для контроллера не подключен и ввод-вывод сигналов в контроллер и от него не осуществляется.
Как показано на фиг.2, рама (A) имеет переднюю нижнюю часть, в которой неподвижно установлена передняя панель (FP) управления, как показано на фиг.4. Соединительное отверстие (S1) для рычага управления шпинделя (S) расположено в средней части передней панели (FP) управления в направлении длины.
Как показано на фиг.2, подвижный модуль управляющего терминала (см. 700 на фиг.8), установленный в раме (A) устройства автоматического подключения управляющего терминала для воздушного выключателя, соответствующего настоящему изобретению, установлен в передней верхней части рамы (A) с возможностью вертикального перемещения штангой 600. Подвижный модуль управляющего терминала (см. 700 на фиг.8) включает множество соединителей 720, или три соединителя 720 на фиг.2, и несущий элемент 710, который удерживает соединители 720 обычным образом. Ссылочной позицией 710a обозначена удлиненная опорная часть, отступающая от обеих концевых частей несущего элемента 710 в направлении длины для удерживания несущего элемента 710 рамой (A). Удлиненная опорная часть 710a может перемещаться вверх и вниз вместе с несущим элементом 710 вдоль выреза (ссылочная позиция не присвоена) в раме (A), который позволяет несущему элементу 710 перемещаться в вертикальном направлении.
Теперь со ссылками на фиг.2, 4 и 5 будет описан предпочтительный вариант конструкции устройства автоматического подключения управляющего терминала для воздушного выключателя, соответствующего настоящему изобретению.
Устройство автоматического подключения управляющего терминала для воздушного выключателя, соответствующего настоящему изобретению, как показано на фиг.4, включает шпиндель (S), имеющий среднюю часть передней пластины (FP), в которой открыто соединительное отверстие (S1) для рычага управления, и подвижную пластину (МР), которая может совершать возвратно-поступательное движение по снабженной резьбой части шпинделя (S) и снабжена частью (Р1) с резьбовым отверстием с охватывающей резьбой, входящей в зацепление со снабженной резьбой частью шпинделя (S).
Одна пара реечных передач (R) расположена на верхней поверхности подвижной пластины (МР) по всей длине подвижной пластины (МР) или на ее части.
Шпиндель (S) снабжен резьбовой частью и может вручную вращаться (поворачиваться), будучи соединенным с рычагом управления (не показан). Шпиндель (S) может также вращаться электрическим двигателем (не показан).
Реечные передачи (R) установлены на верхней поверхности подвижной пластины (МР) и, таким образом, могут совершать возвратно-поступательное движение вместе с подвижной пластиной (МР), совершающей возвратно-поступательное движение.
Как показано на фиг.5, устройство автоматического подключения управляющего терминала, соответствующее настоящему изобретению, кроме того, включает шестерни 300a, 300b, кулачок 400, рычаг 500 и штангу 600.
Шестерни 300a, 300b с возможностью вращения установлены в заданном положении на боковой пластине 100 рамы таким образом, что они входят в зацепление с реечными передачами (R) в контрольном положении, замкнутом положении и нерабочем положении основного корпуса (B). Шестерни 300a, 300b могут вращаться согласно реечным передачам (R), совершающим возвратно-поступательное движение в контрольном положении и замкнутом положении основного корпуса (B). Шестерни 300a, 300b включают первую шестерню 300a, входящую в зацепление с реечными передачами (R), и вторую шестерню 300b, входящую в зацепление с зубчатой частью кулачка 400. Первая шестерня 300a и вторая шестерня 300b установлены на одной общей оси 200 вращения.
Кулачок 400 снабжен зубчатой частью, которая входит в зацепление с шестернями 300a, 300b и может вращаться для передачи движущей силы вращения, переданной от шестерен 300a, 300b.
Радиус зубчатых частей кулачка 400 больше радиуса шестерен 300a, 300b для усиления вращающего момента.
Рычаг 500 имеет одну концевую часть, соединяющуюся с кулачком 400 или отделяющуюся от кулачка 400. Рычаг 500 может поворачиваться движущей силой вращения, переданной от кулачка 400, когда он соединен с кулачком 400.
Кулачок 400 снабжен выступом 420 для передачи движущей силы вращения. И для того чтобы позволять выступу 420 кулачка вставляться для передачи движущей силы вращения или отделяться для прекращения передачи движущей силы вращения, рычаг 500 снабжен частью 510 с вырезом, соответствующей выступу 420 кулачка. Здесь выступ 420 кулачка должен только отступать от поверхности пластины кулачка 400 для передачи движущей силы вращения кулачка 400, и, таким образом, он может быть конфигурирован с модификацией как штырьковый элемент, соединяемый, будучи отступающим от поверхности пластины кулачка 400. Как показано на фиг.5, выступающая часть (B1) может отступать от основного корпуса (B) или от элемента (может быть выполнен как пластинчатая рейка, соединенная с основным корпусом), удерживающего основной корпус (B) таким образом, что он может перемещаться с основным корпусом (B).
Для эффективной передачи горизонтальной движущей силы для горизонтального перемещения основного корпуса (см. В на фиг.2), предпочтительно, ось кулачка 400 расположена смежно с серединой высоты основного корпуса.
Как показано на фиг.5, для горизонтального перемещения основного корпуса из контрольного положения в соединенное положение кулачок 400 снабжен частью с вырезом 410, входящим в контакт с выключателем или выступающей частью (B1) элемента, удерживающего основной корпус, для приложения горизонтальной движущей силы или отделения от выступающей части (B1) для прекращения приложения горизонтальной движущей силы.
Для получения вращающего момента, достаточно сильного для соединения электрического контакта основного корпуса и электрического контакта рамы друг с другом, часть с вырезом 410, расположенная на кулачке, состоит из кулачкового паза, имеющего кулачковые профили 400b-1, 400b-3, 400b-5, проходящие от оси кулачка 400, как показано на фиг.3.
Кулачковые профили 400b-1, 400b-3, 400b-5 включают входную поверхность 400b-1, формирующую вход кулачкового паза. Для уменьшения инерционной силы основного корпуса кулачковые профили 400b-1, 400b-3, 400b-5 включают первую дугообразную поверхность 400b-3, проходящую от входной поверхности 400b-1 под углом больше 90° и меньше 180° через точку 400b-2 перегиба и имеющую заданный первый радиус (a) кривизны. Кулачковые профили 400b-1, 400b-3, 400b-5 включают вторую дугообразную поверхность 400b-5, проходящую от первой дугообразной поверхности 400b-3 через точку 400b-4 перегиба и имеющую второй радиус (b) кривизны, меньший, чем первый радиус (a) кривизны. Благодаря второй дугообразной поверхности 400b-5, имеющей второй радиус (b) кривизны, меньший, чем первый радиус (a) кривизны, когда воздушный выключатель осуществляет операцию втягивания (перемещения в соединенное положение), угловое ускорение и момент инерции кулачка 400 могут быть уменьшены после того, как сила реакции, произведенная соединением каждого электрического контакта рамы и основного корпуса друг с другом, достигает максимальной величины. Таким образом, благодаря контакту выступающей части (B1) со второй дугообразной поверхностью 400b-5, имеющей второй радиус (b) кривизны, меньший, чем первый радиус (a) кривизны, вращающий момент, произведенный кулачком 400, уменьшается и, соответственно, операция втягивания, а именно перемещения в соединенное положение, может быть плавно завершена.
Штанга 600 соединена с рычагом 500 и, таким образом, может двигаться в вертикальном направлении согласно вращению рычага 500. Как показано на фиг.5, штанга 600 может направляться для устойчивого движения в вертикальном направлении одной парой направляющих элементов (ссылочная позиция не присвоена), отнесенных друг от друга с зазором, который больше, чем ширина (ссылочная позиция не присвоена) штанги 600. Штанга 600 имеет верхнюю часть, снабженную верхней головной частью 600a, конфигурированной так, что она имеет форму головки за счет расширения штанги 600. Верхняя головная часть 600a снабжена горизонтальной опорной прорезью 600a-1, конфигурированной так, чтобы сквозь нее проходила удлиненная опорная часть 710a несущего элемента 710, описанного далее, в направлении ширины верхней головной части 600a.
Как показано на фиг.2 и 8, устройство автоматического подключения управляющего терминала для воздушного выключателя, соответствующего настоящему изобретению, кроме того, включает неподвижный модуль 800 управляющего терминала и подвижный модуль 700 управляющего терминала.
Неподвижный модуль 800 управляющего терминала неподвижно установлен на основном корпусе. Неподвижный модуль 800 управляющего терминала включает множество соединителей 820 (три соединителя на фиг.8) и несущий элемент 810, удерживающий соединители 820. Каждый соединитель 820 выполнен как штырьковый соединитель, в котором сформировано множество соединительных контактов (не показаны) электрического проводника, и их внешние поверхности закрыты электроизолирующим материалом. И, предпочтительно, три соединителя 820 выполнены согласно их функциям, то есть соединитель для ввода управляющего сигнала в контроллер, соединитель для передачи выходного сигнала от контроллера и соединитель для подключения источника энергии к контроллеру. Каждый соединитель 820 конфигурирован как обычно используемый штырьковый соединитель.
Подвижный модуль 700 управляющего терминала установлен в раме (см. А на фиг.2 и 100 на фиг.5). И подвижный модуль 700 управляющего терминала соединен со штангой 600 и, таким образом, подвижен в вертикальном направлении вместе со штангой 600, перемещающейся в вертикальном направлении. То есть, как показано на фиг.5, так как сквозь горизонтальную опорную прорезь 600a-1, расположенную в верхней головной части 600a штанги 600, проходит удлиненная опорная часть 710a несущего элемента 710, как показано на фиг.2, подвижный модуль 700 управляющего терминала подвижен в вертикальном направлении вместе со штангой 600, перемещающейся в вертикальном направлении. Соответственно, подвижный модуль 700 управляющего терминала может перемещаться в положение для соединения с неподвижным модулем 800 управляющего терминала основного корпуса и положение для отключения от неподвижного модуля 800 управляющего терминала.
Подвижный модуль 700 управляющего терминала, установленный в раме, включает множество соединителей 720 (три соединителя на фиг.8) и несущий элемент 710, удерживающий соединители 720. Предпочтительно, три соединителя 720 выполнены согласно их функциям, то есть соединитель для ввода управляющего сигнала в контроллер, соединитель для передачи выходного сигнала от контроллера и соединитель для подключения энергии к контроллеру. Каждый соединитель 720 конфигурирован как штырьковый соединитель, который обычно используется и легко доступен на рынке. Кроме того, соединители 720 включают верхнюю часть штырькового соединителя и нижнюю часть штырькового соединителя, и, соответственно, верхняя часть штырькового соединителя может соединяться с соединителем (не показан) провода для ввода управляющего сигнала, соединителем (не показан) провода для передачи выходного сигнала от контроллера и соединителем (не показан) провода для подключения источника энергии к контроллеру, и нижняя часть штырькового соединителя может соединяться с соединителем 820 основного корпуса.
Как указано выше, как показано на фиг.2, несущий элемент 710 снабжен удлиненными опорными частями 710a на обеих концевых частях в направлении длины.
Каждый соединитель 720 снабжен электрическими соединительными контактами, а именно множеством соединительных контактов, сформированных из электрического проводника и закрытых электроизолирующим материалом. И каждый соединитель 720 выполнен как штырьковый соединитель.
На фиг.5 ссылочной позицией 100 обозначены обе боковые пластины рамы (см. А на фиг.2), ссылочной позицией UG обозначена верхняя направляющая, направляющая основной корпус при осуществлении операции втягивания или выдвижения, не описанной ссылочной позицией LR обозначена нижняя направляющая, направляющая основной корпус в замкнутое положение или нерабочее положение, и не описанной ссылочной позицией LR1 обозначено множество роликов, которые используются для уменьшения инерционной силы, когда основной корпус перемещается в замкнутое положение или нерабочее положение, будучи с возможностью вращения установленными на нижней направляющей (LR).
Теперь со ссылками на фиг.2, 5 и 8 будет описана конфигурация воздушного выключателя, имеющего устройство автоматического подключения управляющего терминала, соответствующего настоящему изобретению.
Воздушный выключатель, соответствующий настоящему изобретению, включает раму (A), основной корпус (B), шпиндель (S), подвижную пластину (МР), реечные передачи (R), шестерни 300a, 300b, кулачок 400, рычаг 500, штангу 600, неподвижный модуль 800 управляющего терминала и подвижный модуль 700 управляющего терминала 700.
Рама (A) снабжена электрическим контактом (расположенным на задней стороне на фиг.2, но не показанным), который может соединяться с нагрузкой и мощностью в цепи.
Основной корпус (B) может перемещаться к замкнутое положение, в котором основной корпус (B) электрически соединен с рамой (A), контрольное положение, в котором основной корпус (B) электрически отключен от рамы, но источник энергии управления подключен к нему и может осуществляться ввод-вывод сигналов, и нерабочее положение, в котором основной корпус (B) отключен от рамы (A), источник энергии управления не подключен и ввод-вывод сигналов не осуществляется.
Шпиндель (S) снабжен резьбовой частью, как показано на фиг.4. И соединительное отверстие (S1) для рычага управления расположено в шпинделе (S), и, соответственно, шпиндель (S) может вручную вращаться, будучи соединенным с рычагом управления (не показан).
Подвижная пластина (МР) соединена со снабженной резьбой частью шпинделя (S) резьбой и, таким образом, может совершать возвратно-поступательное движение по снабженной резьбой части вращающегося шпинделя (S).
Реечные передачи (R) установлены на верхней поверхности подвижной пластины (МР) и, таким образом, могут совершать возвратно-поступательное движение вместе с подвижной пластиной (МР), совершающей возвратно-поступательное движение.
Шестерни 300a, 300b установлены в заданном положении на боковой пластине 100 рамы таким образом, что они зацепляются с реечными передачами (R) в контрольном положении, замкнутом положении и нерабочем положении основного корпуса (B). И шестерни 300a, 300b могут вращаться согласно реечным передачам (R), совершающим возвратно-поступательное движение в контрольном положении, замкнутом положении и нерабочем положении основного корпуса (B).
Кулачок 400 снабжен множеством зубчатых частей, которые входят в зацепление с шестернями 300a, 300b и могут вращаться для передачи движущей силы вращения, передаваемой от шестерен 300a, 300b.
Рычаг 500 может иметь одну концевую часть, соединяемую с кулачком 400 или отделяемую от кулачка 400. И когда он соединен с кулачком 400, рычаг 500 может вращаться движущей силой вращения, переданной от кулачка 400.
Штанга 600 соединена с рычагом 500 и, таким образом, может двигаться в вертикальном направлении согласно вращающемуся рычагу 500.
Неподвижный модуль 800 управляющего терминала установлен в основном корпусе (B).
Подвижный модуль 700 управляющего терминала установлен в раме (A) и соединен со штангой (600). Соответственно, подвижный модуль 700 управляющего терминала может двигаться в вертикальном направлении вместе со штангой 600, перемещающейся в вертикальном направлении, и, таким образом, может двигаться в положение соединения с неподвижным модулем 800 управляющего терминала основного корпуса (B) и положение отключения от неподвижного модуля 800 управляющего терминала.
Детали, относящиеся к каждому компоненту воздушного выключателя, определены в описании устройства автоматического подключения управляющего терминала для воздушного выключателя, соответствующего предпочтительному варианту осуществления настоящего изобретения, и, таким образом, будут опущены.
Теперь со ссылками на фиг.2-7 будут описаны операции устройства автоматического подключения управляющего терминала для воздушного выключателя и имеющего его воздушного выключателя, соответствующего предпочтительному варианту осуществления настоящего изобретения.
Сначала будет описана операция перемещения основного корпуса из нерабочего положения, показанного на фиг.5, в контрольное положение, показанное на фиг.6.
Как показано на фиг.2, когда рычаг управления (не показан) вставлен в соединительное отверстие (S1) для рычага управления, расположенное в средней части передней панели (FP) управления воздушного выключателя в направлении длины, и, таким образом, шпиндель (S) вращается в направлении по часовой стрелке, подвижная пластина (МР) может перемещаться к передней стороне воздушного выключателя по снабженной резьбой части шпинделя (S), как показано на фиг.4, а именно в сторону передней панели (FP) управления на фиг.2 (вправо на фиг.5).
Так как шестерни 300a, 300b расположены в заданном положении на боковой пластине 100 рамы, реечные передачи (R), установленные на подвижной пластине (МР), входят в зацепление с первой шестерней 300a из шестерен 300a, 300b в контрольном положении и вращают первую шестерню 300a в направлении против часовой стрелки. Соответственно, ось 200 вращения вращается в направлении против часовой стрелки, и вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении против часовой стрелки.
Соответственно, кулачок 400, имеющий зубчатые части, входящие в зацепление со второй шестерней 300b, вращается в направлении по часовой стрелке из состояния, показанного на фиг.5. Здесь, так как радиус зубчатых частей кулачка 400 больше радиуса шестерен 300a, 300b, кулачок 400 производит вращающий момент, усиленный больше, чем вращающий момент второй шестерни 300b. И выступающая часть (B1), отступающая от основного корпуса или несущего элемента, который может с обеспечением опоры перемещаться вместе с основным корпусом, находится на входе паза 410 кулачка 400.
Вращающий момент кулачка 400 передается к рычагу 500, соединенному с выступом 420 кулачка 400, через прорезь 510, в результате вращения кулачка 400 в направлении по часовой стрелке, и, соответственно, рычаг 500 вращается в направлении по часовой стрелке, как показано на фиг.6.
Соответственно, штанга 600, имеющая нижнюю концевую часть, соединенную с одной концевой частью рычага 500, направляется направляющим элементом (ссылочная позиция не присвоена) и опускается в вертикальном направлении.
Согласно опусканию штанги 600 подвижный модуль 700 управляющего терминала рамы (A), соединенный со штангой 600, также опускается в вертикальном направлении удлиненной опорной частью 710a, проходящей сквозь горизонтальную опорную прорезь 600a-1 штанги 600. Соответственно, как показано на фиг.8, соединитель 720 подвижного модуля 700 управляющего терминала вставляется в соединитель 820 неподвижного модуля 800 управляющего терминала, установленный в основном корпусе, и охватывающая часть проводника и охватываемая часть проводника, соответственно имеющие строение штырькового соединителя (не показан) в обоих соединителях 720, 820, входят в контакт друг с другом для соединения друг с другом механически и электрически. Соответственно, операция перемещения основного корпуса из нерабочего положения в контрольное положение и операция автоматического соединения управляющих терминалов завершаются.
Далее со ссылками на фиг.2-8, в частности на фиг.6 и 7, будет описана операция перемещения основного корпуса из контрольного положения в соединенное положение в устройстве автоматического подключения управляющего терминала для воздушного выключателя и содержащего его воздушного выключателя, соответствующего настоящему изобретению.
Когда рычаг управления (не показан) вставлен в соединительное отверстие (S1) для рычага управления, расположенное в средней части передней панели (FP) управления, показанной на фиг.2, в направлении длины в состоянии, показанном на фиг.6, и, таким образом, шпиндель (S) вращается в направлении по часовой стрелке, подвижная пластина (МР), показанная на фиг.4, перемещается к передней стороне воздушного выключателя по снабженной резьбой части шпинделя (S), а именно в направлении передней панели (FP) управления на фиг.2 (вправо на фиг.5).
Первая шестерня 300a, входящая в зацепление с реечными передачами (R), установленными на подвижной пластине (МР) в контрольном положении, вращается в направлении против часовой стрелки. Соответственно, ось 200 вращения также вращается в направлении против часовой стрелки, и вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении против часовой стрелки.
Соответственно, кулачок 400, имеющий зубчатую часть, входящую в зацепление со второй шестерней 300b, также вращается в направлении по часовой стрелке из состояния, показанного на фиг.6. Здесь, так как радиус зубчатой части кулачка 400 больше, чем радиус шестерен 300a, 300b, кулачок 400 производит усиленный вращающий момент по сравнению с вращающим моментом второй ведущей шестерни 300b. И выступающая часть (B1), расположенная на входе паза 410 кулачка 400 в контрольном положении, нажимается частью 410 с вырезом вращением кулачка 400 в направлении по часовой стрелке. Соответственно, выступающая часть (B1) перемещается в горизонтальном направлении по кулачковым профилям паза 410, как показано на фиг.7, и, таким образом, располагается на задней стороне рамы, а именно левой стороне на чертеже. Как показано на фиг.3, при вхождении в контакт с входной поверхностью 400b-1 и первой дугообразной поверхностью 400b-3, проходящей от входной поверхности 400b-1 под углом больше 90° и меньше 180° через точку перегиба 400b-2 и имеющей заданный первый радиус (a) кривизны, за счет вращения кулачка 400 в направлении по часовой стрелке, основной корпус, толкаемый выступающей частью (B1), плавно и быстро перемещается в замкнутое положение в горизонтальном направлении. Соответственно, операция перемещения основного корпуса из контрольного положения в соединенное положение, в котором электрические контакты основного корпуса и рамы электрически и механически соединены друг с другом, завершается. Кроме того, каждое угловое ускорение и момент инерции кулачка 400 уменьшаются после того, как сила реакции, произведенная соединением каждого электрического контакта рамы и основного корпуса друг с другом, достигает максимальной величины, поскольку выступающая часть (B1) входит в контакт со второй дугообразной поверхностью 400b-5, имеющей второй радиус (b) кривизны, меньший, чем первый радиус (a) кривизны. То есть благодаря контакту выступающей части (B1) со второй дугообразной поверхностью 400b-5, имеющей второй радиус (b) кривизны, меньший, чем первый радиус (a) кривизны, вращающий момент, произведенный кулачком 400, уменьшается, и, соответственно, операция втягивания, а именно перемещения в соединенное положение, может быть плавно завершена.
Здесь, поскольку кулачок 400 также вращается в направлении по часовой стрелке, выступ 420 кулачка 400 отделяется от части 510 с вырезом рычага 500, как показано на фиг.7. Соответственно, вращающий момент кулачка 400 больше не передается рычагу 500.
Соответственно, движущая сила не передается от контакта 400 управляющему терминалу, а именно подвижному модулю 700 управляющего терминала через рычаг 500 и штангу 600 при выполнении операции перемещения в замкнутое положение. Таким образом, можно предотвращать приложение чрезмерной нагрузки к управляющим терминалам, а именно подвижному модулю 700 управляющего терминала и неподвижному модулю 800 управляющего терминала.
Однако штанга 600 сохраняет ее опущенное состояние под действием собственного веса, как показано на фиг.7, и, соответственно, подвижный модуль 700 управляющего терминала рамы (A), соединенный со штангой 600 удлиненной опорной частью 710a, проходящей сквозь горизонтальную опорную прорезь 600a-1 штанги 600, также сохраняет его опущенное в вертикальном направлении состояние. Таким образом, как показано на фиг.8, соединитель 720 подвижного модуля 700 управляющего терминала вставлен в соединитель 820 неподвижного модуля 800 управляющего терминала, установленный в основном корпусе в контрольном положении, и, соответственно, охватывающая часть проводника и охватываемая часть проводника (не показаны), имеющие строение штырькового соединителя в обоих соединителях 720, 820, входят в контакт друг с другом, оставаясь соединенными друг с другом механически и электрически. Соответственно, основной корпус перемещается из контрольного положения в соединенное положение, и одновременно управляющие терминалы автоматически соединяются друг с другом. Кроме того, электрическая нагрузка и источник энергии в цепи электрически соединены друг с другом. И источник энергии подключен к контроллеру воздушного выключателя, и контакты ввода-вывода сохраняют соединенное состояние.
Теперь будет описана операция перемещения основного корпуса из соединенного положения, показанного на фиг.7, в контрольное положение, показанное на фиг.6.
Когда рычаг управления (не показан) вставлен в соединительное отверстие (S1) для рычага управления, расположенное в средней части передней панели (FP) управления, показанной на фиг.2, в направлении длины, и затем шпиндель (S) вращается в направлении против часовой стрелки, подвижная пластина (МР), показанная на фиг.4, перемещается к задней стороне воздушного выключателя, а именно в направлении удаления от передней панели (FP) управления, показанной на фиг.2 (влево на фиг.5), по снабженной резьбой части шпинделя (S).
Реечные передачи (R), установленные на подвижной пластине (МР), перемещающейся назад, также перемещаются назад, и, соответственно, первая шестерня 300a, входящая в зацепление с реечными передачами (R), вращается в направлении по часовой стрелке. Таким образом, ось 200 вращения вращается в направлении по часовой стрелке, и вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении по часовой стрелке.
Соответственно, кулачок 400, имеющий зубчатую часть, входящую в зацепление со второй шестерней 300b, переходит в состояние, показанное на фиг.6, будучи вращаемым в направлении против часовой стрелки из состояния, показанного на фиг.7. Здесь, так как радиус зубчатой части кулачка 400 больше, чем радиус шестерен 300a, 300b, кулачок 400 производит вращающий момент, усиленный больше, чем вращающий момент второй шестерни 300b. Здесь выступающая часть (B1), расположенная на второй дугообразной поверхности 400b-5 паза 410 кулачка 400 в замкнутом положении, нажимается частью с вырезом 410 вращением кулачка 400 в направлении против часовой стрелки и, таким образом, горизонтально перемещается к передней стороне рамы по кулачковым профилям паза 410, а именно вправо на чертеже, как показано на фиг.6. Соответственно, основной корпус также перемещается к передней стороне рамы горизонтальным смещением выступающей части (B1). Соответственно, электрические контакты основного корпуса и рамы отделяются друг от друга механически и электрически.
И выступ 420 кулачка 400 входит в контакт с входом 510 паза рычага 500, как показано на фиг.6, в результате вращения кулачка 400 в направлении против часовой стрелки.
Штанга 600, имеющая нижнюю концевую часть, соединенную с одной концевой частью рычага 500, сохраняет ее соединенное состояние, будучи опущенной вертикально.
Таким образом, подвижный модуль 700 управляющего терминала рамы (A), соединенный со штангой 600 удлиненной опорной частью 710a, проходящей сквозь горизонтальную опорную прорезь 600a-1 штанги 600, также сохраняет его вертикально опущенное состояние. Соответственно, как показано на фиг.8, соединитель 720 подвижного модуля 700 управляющего терминала вставлен в соединитель 820 неподвижного модуля 800 управляющего терминала, установленного в основном корпусе, и в этом случае охватывающая часть проводника и охватываемая часть проводника (не показаны), имеющие строение штырькового соединителя в обоих соединителях 720, 820, входят в контакт друг с другом, оставаясь в их механически и электрически соединенном состоянии. В результате операции перемещения основного корпуса из соединенного положения в контрольное положение управляющие терминалы остаются соединенными друг с другом, нагрузка и мощность в цепи электрически отключены друг от друга, мощность подключена к контроллеру воздушного выключателя и контакты ввода-вывода основного корпуса и рамы соединены друг с другом.
Теперь будет описана операция перемещения основного корпуса из контрольного положения, показанного на фиг.6, в нерабочее положение, показанное на фиг.5.
Когда рычаг управления (не показан) вставлен в соединительное отверстие (S1) для рычага управления, расположенное в средней части передней панели (FP) управления, показанной на фиг.2, в направлении длины, и затем шпиндель (S) вращается в направлении против часовой стрелки, подвижная пластина (МР), показанная на фиг.4, перемещается к задней стороне воздушного выключателя, а именно в направлении удаления от панели (FP) управления на фиг.2 (влево на фиг.6) по снабженной резьбой части шпинделя (S).
Реечные передачи (R), установленные на подвижной пластине (МР), также перемещаются в направлении большего удаления от панели (FP) управления (влево на фиг.6), и, соответственно, первая шестерня 300a, входящая в зацепление с реечными передачами (R), также вращается в направлении по часовой стрелке из контрольного положения. Таким образом, ось 200 вращения также вращается в направлении по часовой стрелке, и вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении по часовой стрелке.
Соответственно, кулачок 400, имеющий зубчатые части, входящие в зацепление со второй шестерней 300b, вращается в направлении против часовой стрелки из состояния, показанного на фиг.6. Здесь выступающая часть (B1) отделяется от паза 410 кулачка 400 и находится в состоянии, показанном на фиг.5.
И в результате вращения кулачка 400 в направлении против часовой стрелки рычаг 500, соединенный с выступом 420 кулачка 400 через прорезь 510, вращается в направлении против часовой стрелки, как показано на фиг.5.
Соответственно, штанга 600 имеющая нижнюю концевую часть, соединенную с одной концевой частью рычага 500, направляется направляющим элементом (ссылочная позиция не присвоена) и, таким образом, поднимается в вертикальном направлении.
В результате подъема штанги 600 подвижный модуль 700 управляющего терминала рамы (A), соединенный со штангой 600 удлиненной опорной частью 710a, проходящей сквозь горизонтальную опорную прорезь 600a-1 штанги 600, также поднимается в вертикальном направлении. Соответственно, как показано на фиг.8, соединитель 720 подвижного модуля 700 управляющего терминала отключается от соединителя 820 неподвижного модуля 800 управляющего терминала, установленного в основном корпусе, и охватывающая часть проводника и охватываемая часть проводника (не показаны), имеющие строения штырькового соединителя в обоих соединителях 720, 820, механически и электрически отключены друг от друга. Соответственно, операция перемещения основного корпуса из контрольного положения в нерабочее положение и операция автоматического соединения управляющих терминалов завершены.
В устройстве автоматического подключения управляющего терминала и содержащем его воздушном выключателе, соответствующем настоящему изобретению, возможно соединение или разъединение управляющего терминала основного корпуса и управляющего терминала рамы автоматически и надежно в замкнутом положении, контрольном положении или нерабочем положении.
Кроме того, в соответствии с настоящим изобретением движущая сила не передается от кулачка управляющему терминалу при перемещении основного корпуса в замкнутое положение, и возможно предотвращение приложения чрезмерной нагрузки к управляющим терминалам.
Кроме того, в соответствии с настоящим изобретением возможно усиление вращающего момента, необходимого для соединения электрических контактов основного корпуса и рамы друг с другом.
Кроме того, в соответствии с настоящим изобретением управляющие терминалы выполнены как штырьковые соединители, закрытые электроизолирующим материалом и соединяемые друг с другом вверх и вниз, и, соответственно, можно минимизировать открытость проводящих частей и, таким образом, можно минимизировать возможность несчастных случаев при обращении с электричеством, таких как замыкание на землю и поражение электрическим током.
Кроме того, в соответствии с настоящим изобретением управляющие терминалы выполнены как штырьковые соединители, и, соответственно, процесс монтажа проводки может быть осуществлен просто посредством соединения штырькового соединителя провода и штырькового соединителя управляющего терминала друг с другом, и, таким образом, возможно повышение производительности монтажа проводки для управляющих терминалов, и, таким образом, возможно сокращение стоимости производства воздушного выключателя.
Кроме того, в соответствии с настоящим изобретением управляющие терминалы снабжены соединителями согласно их функциям, то есть соединителем для ввода управляющего сигнала в контроллер, соединителем для передачи выходного сигнала от контроллера и соединителем для подключения мощности к контроллеру, и, соответственно, можно минимизировать возможность неправильной электропроводки и удобно осуществлять процесс монтажа проводки.
Кроме того, в соответствии с настоящим изобретением управляющие терминалы снабжены обычными и короткими соединителями согласно их функциям, то есть соединителем для ввода управляющего сигнала в контроллер, соединителем для передачи выходного сигнала от контроллера и соединителем для подключения источника энергии к контроллеру, и, соответственно, не требуются затраты на формы для изготовления особых управляющих терминалов, и, таким образом, можно решительно сокращать стоимость изготовления воздушного выключателя.
Указанные выше варианты конструкции и преимущества являются только иллюстративными и не должны рассматриваться как ограничивающие настоящее описание. Настоящие идеи изобретения могут легко применяться с другими типами устройств. Это описание имеет только иллюстративный характер и не ограничивает объем формулы изобретения. Для специалистов в данной области техники будут очевидны многие альтернативы, модификации и варианты. Признаки, конструкции, способы и другие характеристики описанных здесь типичных вариантов конструкции могут быть скомбинированы различными путями для получения дополнительных и/или альтернативных вариантов осуществления изобретения.
Поскольку представленные признаки изобретения могут быть воплощены в нескольких формах, не отступая от его характеристик, также следует понимать, что описанные выше варианты осуществления изобретения не ограничены ни одной из деталей предшествующего описания, если не определено иначе, а, скорее, должны быть рассмотрены широко в пределах его объема, определенного прилагаемой формулой изобретения, и, таким образом, все изменения и модификации, которые входят в пределы и границы формулы изобретения или эквиваленты таких пределов и границ, охвачены прилагаемой формулой изобретения.
Изобретение относится к области электротехники. Техническим результатом является снижение стоимости изготовления, упрощение процесса монтажа. Устройство автоматического подключения управляющего терминала содержит: кулачок, рычаг, имеющий одну концевую часть, которая может соединяться с кулачком или отделяться от кулачка, и вращающийся движущей силой вращения, передаваемой от кулачка, когда он соединен с кулачком, штангу, соединенную с рычагом и, таким образом, подвижную в вертикальном направлении согласно вращению рычага, неподвижный модуль управляющего терминала, неподвижно установленный в основном корпусе, и подвижный модуль управляющего терминала, установленный на раме и перемещаемый в положение для соединения с неподвижным модулем управляющего терминала основного корпуса и положение для отключения от него. 2 н. и 18 з.п. ф-лы, 8 ил.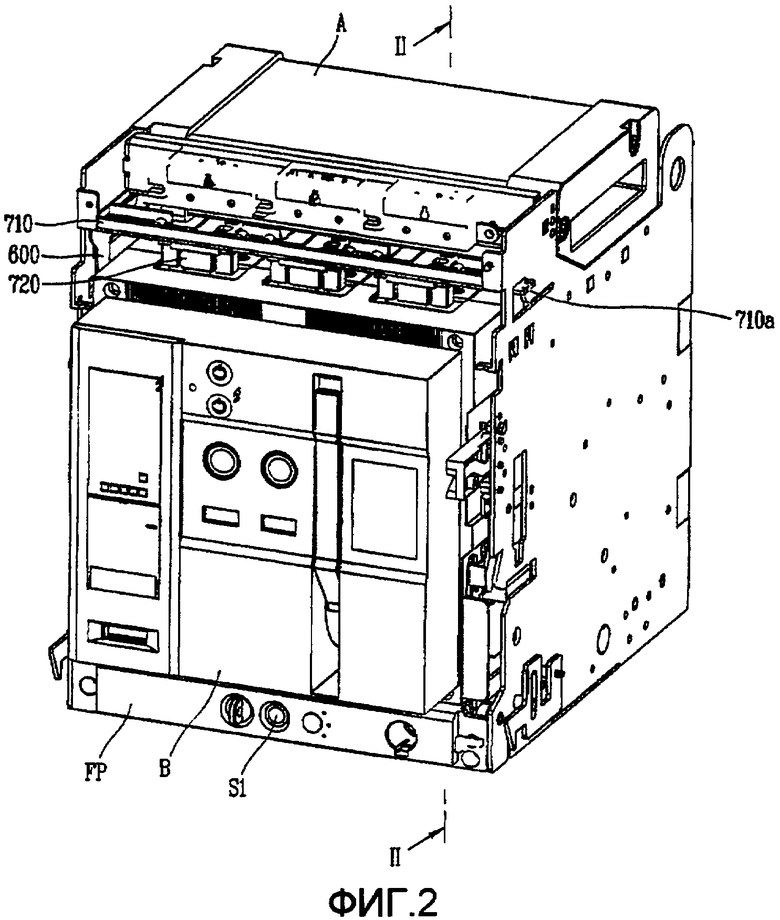
1. Устройство автоматического подключения управляющего терминала для воздушного выключателя, содержащего раму, электрически соединенную с электрической нагрузкой и источником энергии в цепи, и основной корпус, который может перемещаться в замкнутое положение, в котором основной корпус электрически соединен с рамой, контрольное положение, в котором основной корпус электрически отключен от рамы, но источник энергии управления подключен, и осуществляется ввод-вывод сигналов, и в нерабочее положение, в котором основной корпус электрически отключен от рамы, источник энергии управления не подключен и ввод-вывод сигналов не осуществляется, причем устройство автоматического подключения управляющего терминала содержит:
шпиндель, снабженный резьбовой частью и вращающийся вручную, будучи соединенным с рычагом управления;
подвижную пластину, соединенную со снабженной резьбой частью шпинделя посредством зацепления для совершения возвратно-поступательного движения по снабженной резьбой части вращающегося шпинделя;
реечную передачу, установленную на верхней поверхности подвижной пластины, для совершения возвратно-поступательного движения вместе с возвратно-поступательным движением подвижной пластины;
шестерню, установленную в соответствующих положениях основного корпуса, для зацепления с реечной передачей и, таким образом, вращения согласно возвратно-поступательному движению реечной передачи;
кулачок, снабженный зубчатой частью, которая зацепляется с шестерней, и, таким образом, вращающийся для передачи движущей силы вращения от шестерни;
рычаг, имеющий одну концевую часть, которая может соединяться с кулачком или отделяться от кулачка, и вращающийся движущей силой вращения, передаваемой от кулачка, когда он соединен с кулачком;
штангу, соединенную с рычагом и, таким образом, подвижную в вертикальном направлении согласно вращению рычага;
неподвижный модуль управляющего терминала, неподвижно установленный в основном корпусе; и
подвижный модуль управляющего терминала, установленный на раме, соединенный со штангой и, таким образом, вертикально подвижный вместе с вертикально перемещающейся штангой и перемещающийся в положение для соединения с неподвижным модулем управляющего терминала основного корпуса и положение для отключения от него.
2. Устройство по п.1, в котором кулачок снабжен выступом для передачи движущей силы вращения и
в котором рычаг снабжен частью с пазом, соответствующей выступу кулачка, таким образом, допускающим вставку выступа кулачка для передачи движущей силы вращения или отделения для прекращения передачи движущей силы вращения.
3. Устройство по п.1, в котором выступающая часть отступает от основного корпуса или элемента, удерживающего основной корпус, для перемещения с основным корпусом и
в котором кулачок снабжен частью с пазом, входящей в контакт с выступающей частью, для создания горизонтальной движущей силы или отделения от выступающей части для прекращения создания горизонтальной движущей силы таким образом, что основной корпус может горизонтально перемещаться из контрольного положения в соединенное положение, или наоборот.
4. Устройство по п.3, в котором ось кулачка расположена смежно с серединой высоты основного корпуса таким образом, чтобы эффективно передавать горизонтальную движущую силу для горизонтального перемещения основного корпуса.
5. Устройство по п.3, в котором часть с пазом, расположенная на кулачке, состоит кулачкового паза, имеющего кулачковые профили, проходящие на большое расстояние от оси кулачка, для получения вращающего момента, достаточно сильного для соединения электрического контакта основного корпуса и электрического контакта рамы друг с другом.
6. Устройство по п.5, в котором кулачковые профили содержат:
входную поверхность, формирующую вход кулачкового паза;
первую дугообразную поверхность, проходящую от входной поверхности под углом больше 90° и меньше 180° и имеющую заданный первый радиус кривизны для уменьшения инерционной силы основного корпуса; и вторую дугообразную поверхность, проходящую от первой дугообразной поверхности и имеющую второй радиус кривизны, меньший, чем первый радиус кривизны.
7. Устройство по п.1, в котором радиус зубчатой части кулачка больше, чем радиус ведущей шестерни, для усиления вращающего момента.
8. Устройство по п.1 или 7, в котором шестерня содержит первую шестерню, установленную на одной общей оси вращения и входящую в зацепление с реечными передачами, и вторую шестерню, которая входит в зацепление с зубчатой частью кулачка.
9. Устройство по п.1, в котором неподвижный модуль управляющего терминала, установленный в основном корпусе, содержит:
множество соединителей, в которых установлены электрические соединительные контакты, и имеющих каждый внешнюю поверхность, покрытую электроизолирующим материалом; и
несущий элемент, который удерживает соединители.
10. Устройство по п.9, в котором соединители представляют собой штырьковые соединители.
11. Устройство по п.1, в котором подвижный модуль управляющего терминала, установленный в раме, содержит:
множество соединителей, в которых установлены электрические соединительные контакты, и имеющих каждый внешнюю поверхность, покрытую электроизолирующим материалом; и несущий элемент, который удерживает соединители.
12. Устройство по п.11, в котором соединители представляют собой штырьковые соединители.
13. Воздушный выключатель, содержащий:
раму, электрически соединенную с электрической нагрузкой и источником энергии в цепи;
основной корпус, который может перемещаться в замкнутое положение, в котором основной корпус электрически соединен с рамой, контрольное положение, в котором основной корпус электрически отключен от рамы, но источник энергии управления подключен и осуществляется ввод-вывод сигналов, и нерабочее положение, в котором основной корпус электрически отключен от рамы, источник энергии управления не подключен и ввод-вывод сигналов не осуществляется;
шпиндель, снабженный резьбовой частью и вращаемый вручную, будучи соединенным с рычагом управления;
подвижную пластину, соединенную со снабженной резьбой частью шпинделя посредством зацепления таким образом, что она может совершать возвратно-поступательное движение по снабженной резьбой части вращающегося шпинделя;
реечную передачу, установленную на верхней поверхности подвижной пластины, для совершения возвратно-поступательного движения вместе с возвратно-поступательным движением подвижной пластины;
шестерню, установленную в соответствующих положениях основного корпуса, которая входит в зацепление с реечной передачей и, таким образом, соответственно вращающуюся согласно возвратно-поступательному движению реечной передачи;
кулачок, снабженный зубчатой частью, которая входит в зацепление с шестерней и, таким образом, вращающийся для передачи движущей силы вращения от шестерни;
рычаг, имеющий одну концевую часть, которая может соединяться с кулачком или отделяться от кулачка, и вращающийся движущей силой вращения, переданной от кулачка, когда он соединен с кулачком;
штангу, соединенную с рычагом и, таким образом, подвижную в вертикальном направлении согласно вращению рычага;
неподвижный модуль управляющего терминала, неподвижно установленный в основном корпусе; и
подвижный модуль управляющего терминала, установленный в раме, соединенный со штангой и, таким образом, вертикально подвижный вместе с вертикально перемещающейся штангой и перемещаемый в положение для соединения с неподвижным модулем управляющего терминала основного корпуса и положение отключения от него.
14. Воздушный выключатель по п.13, в котором кулачок снабжен выступом для передачи движущей силы вращения и в котором рычаг снабжен частью с пазом, соответствующей выступу кулачка, допускающей вставку выступа кулачка для передачи движущей силы вращения или отделение для прекращения передачи движущей силы вращения.
15. Воздушный выключатель по п.13, в котором выступающая часть отступает от основного корпуса или элемента, удерживающего основной корпус, таким образом, что он перемещается с основным корпусом, и в котором кулачок снабжен частью с пазом, входящей в контакт с выступающей частью таким образом, чтобы создавать горизонтальную движущую силу, или отделяющейся от выступающей части таким образом, чтобы прекращать создание горизонтальной движущей силы так, что основной корпус может горизонтально перемещаться из контрольного положения в соединенное положение, или наоборот.
16. Воздушный выключатель по п.15, в котором ось кулачка расположена смежно с серединой высоты основного корпуса таким образом, чтобы эффективно передавать горизонтальную движущую силу для горизонтального перемещения основного корпуса.
17. Воздушный выключатель по п.15, в котором часть с пазом, расположенная на кулачке, состоит из кулачкового паза, имеющего кулачковые профили, проходящие далеко от оси кулачка, чтобы получать вращающий момент, достаточно сильный для соединения электрического контакта основного корпуса и электрического контакта рамы друг с другом.
18. Воздушный выключатель по п.17, в котором кулачковые профили содержат:
входную поверхность, формирующую вход кулачкового паза;
первую дугообразную поверхность, проходящую от входной поверхности под углом больше 90° и меньше 180° и имеющую заданный первый радиус кривизны для уменьшения инерционной силы основного корпуса; и вторую дугообразную поверхность, проходящую от первой дугообразной поверхности и имеющую второй радиус кривизны, меньший, чем первый радиус кривизны.
19. Воздушный выключатель по п.13, в котором радиус зубчатой части кулачка больше, чем радиус шестерни, для усиления вращающего момента.
20. Воздушный выключатель по п.13 или 19, в котором шестерня включает первую шестерню, установленную на одной общей оси вращения и входящую в зацепление с реечной передачей, и вторую шестерню, которая входит в зацепление с зубчатой частью кулачка.
| Тренировочное устройство для велосипедистов, бегунов и других спортсменов | 1935 |
|
SU58519A1 |
| ВЫДВИЖНОЙ ПРИБОРНЫЙ БЛОК ДЛЯ РАСПРЕДЕЛИТЕЛЬНОГО УСТРОЙСТВА С ВСПОМОГАТЕЛЬНЫМИ РАЗЪЕМНЫМИ КОНТАКТАМИ | 2003 |
|
RU2276826C2 |
| RU 2001117843 А, 27.06.2003 | |||
| ЭЛЕКТРИЧЕСКОЕ РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1990 |
|
RU2036544C1 |
| US 4384179 А, 17.05.1983 | |||
| US 5459293 А, 17.10.1995. | |||

