Изобретение относится к радиолокации и радионавигации и может быть использовано в бортовых авиационных радиоэлектронных комплексах, в частности в бортовых обзорных радиолокаторах.
Известен самолетный обнаружитель подвижных целей с многолучевой антенной. В передающей части обнаружителя формируется многолучевая диаграмма направленности (ДН). Цифровая система обработки, реализующая доплеровскую фильтрацию, позволяет обрабатывать сигналы множества целей в больших объемах пространства, в которых осуществляется обзор. Устройство содержит когерентный передатчик (ПРД), матрицу Батлера для формирования ДН, приемо-передающую антенную решетку (АР). С помощью формирования нулей приемной диаграммы производится подавление мешающих отражений, принимаемых по боковым лепесткам.
Недостатком данной и других обзорных РЛС является то, что они, принимая и обрабатывая сигналы, отраженные от земной поверхности, не производят измерение путевой скорости и для этой цели используются специальные устройства измерители путевой скорости.
Известны доплеровские измерители путевой скорости, основанные на измерении средней частоты доплеровского спектра сигнала, отраженного земной поверхностью.
Недостатком таких устройств является невысокая точность измерения путевой скорости, связанная с невозможностью формирования узкого главного лепестка диаграммы направленности приемной антенны и за счет влияния помех, принимаемых боковыми лепестками.
Известны устройства измерения путевой скорости, основанные на корреляционном принципе, включающие формирователь исходного зондирующего сигнала, первичные измерительные преобразователи, формирующие сигналы, которые зависят от взаимодействия объекта со средой взаимной скорости, и соответствуют приему отраженных сигналов разными лучами ДН приемной антенны, корреляционный измеритель транспортного запаздывания (КИТЗ), блок вычисления путевой скорости. При этом КИТЗ включает коррелометр и экстремальный регулятор. В корреляционном измерителе входные сигналы по форме аналогичны друг другу, но обладают временными запаздываниями относительно друг друга транспортными запаздываниями. Искомая величина скорости является детерминированной функцией от транспортных запаздываний, а сами транспортные запаздывания определяются путем поиска максимума взаимной корреляционной функции входных сигналов. Эта процедура выполняется блоком КИТЗ.
Недостатком этих устройств также является низкая точность измерения путевой скорости. Известные устройства измерения путевой скорости являются сложными автономными устройствами, к тому же дают низкую точность измерения путевой скорости, поэтому целесообразно проводить измерение путевой скорости, используя аппаратуру обзорных РЛС с эффективным подавлением мешающих отражений.
Наиболее близким по технической сущности является РЛС, содержащая когерентный ПРД, выход которого соединен со входом передающей антенны, М-элементную приемную АР, М-выходов которой соединены с М-входами диаграммообразующей схемы (ДОС), N-выходов которой соединены с N-входами N-канального приемного устройства (ПРМ), N-выходов которого соединены с N-входами N-канального аналого-цифрового преобразователя (АЦП), N-выходов которого соединены с N-входами блока вычисления путевой скорости, устройство синхронизации (УС), первый выход которого соединен со входом ПРД, а второй выход с входом N-канального ПРМ.
Недостатком такого устройства является то, что оно не позволяет измерять путевую скорость.
Целью предложенного устройства является расширение функциональных возможностей бортовой обзорной РЛС, а именно измерение путевой скорости носителя РЛС.
Это достигается тем, что в известное устройство вводятся N блоков формирования разностных сигналов (ФРС), второе N-канальное ПРМ, второй N-канальный АЦП, N блоков углоскоростной селекции (УСС).
Сущность изобретения заключается в определении путевой скорости носителя РЛС фазовым методом, при этом получая информацию об изменении фазы отраженного от земной поверхности сигнала с блоком УСС обзорного бортового радиолокатора.
Известен принцип измерения скорости по изменению фазы отраженного сигнала за известный интервал времени. Кроме того, известно что подстилающую поверхность можно рассматривать как набор зеркальных точек и отражение от них можно рассматривать как отражение от неподвижного объекта. За малый период повторения излучаемых сигналов, при реальных скоростях летательного аппарата (ЛА) и при длине волны излучения, составляющем единицы метров (например), перемещение ЛА относительно отражающего участка поверхности может быть меньше длины волны и разность фаз отраженных сигналов может измеряться однозначно. Это позволяет производить измерение скорости ЛА фазовым методом. При этом для измерения разности фаз используются блоки УСС, которые в свою очередь используют выходные сигналы с блоков ФРС и ДОС.
Известно, что формирование суммарных и разностных диаграмм направленности и использование УСС при обработке принимаемых сигналов позволяет обузить главный лепесток, подавить мешающие отражения, принимаемые боковыми лепестками, а следовательно, более точно измерять фазу принимаемых сигналов. Формирование суммарных и разностных сигналов может быть осуществлено путем сложения и вычитания сигналов, соответствующих отдельным лучам ДН. Блоки УСС формируют сигналы, соответствующие изменению фазы отраженных сигналов за период повторения, которые используются для расчета скорости ЛА в вычислительном устройстве.
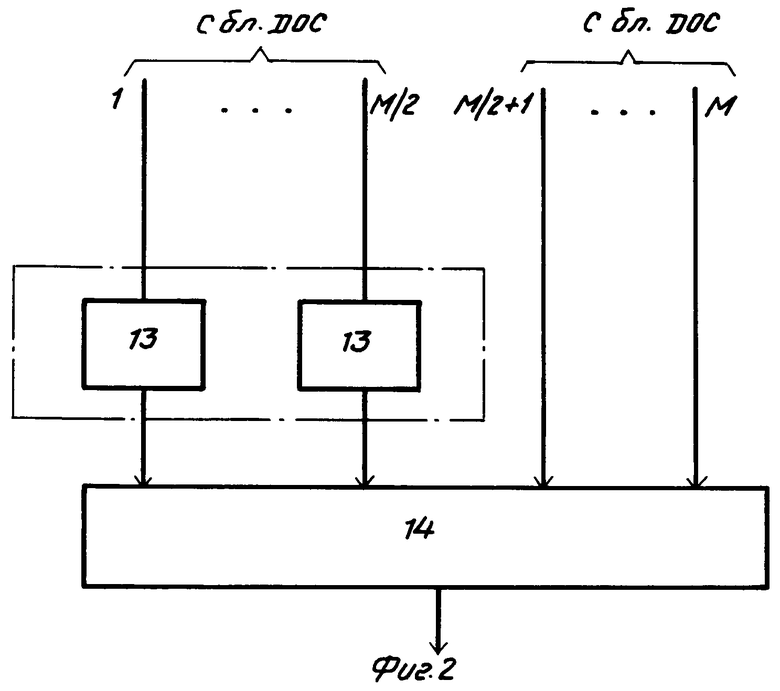
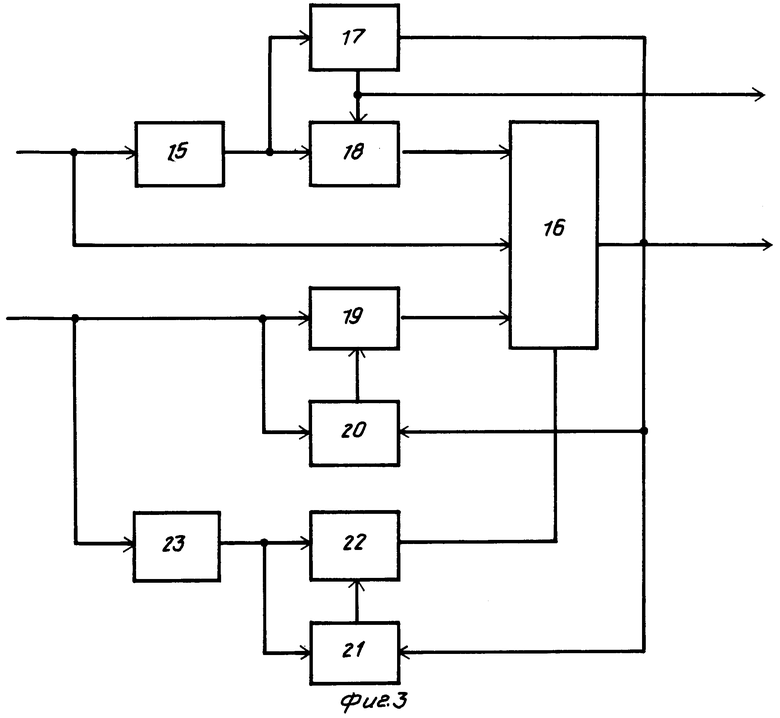
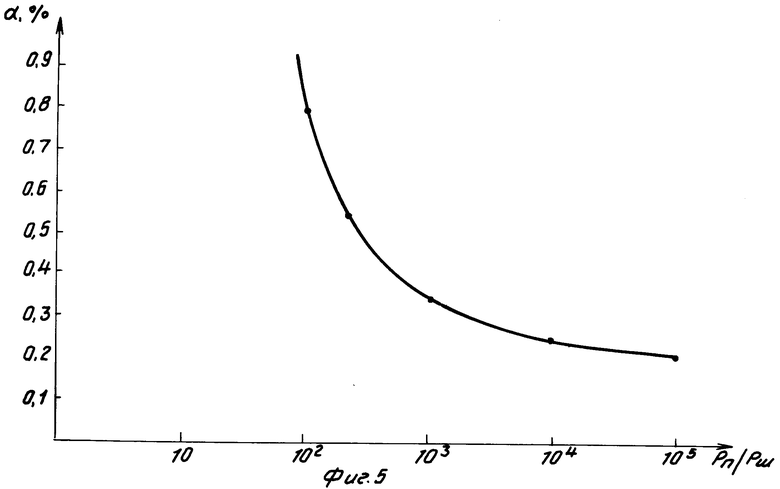
На фиг. 1 показана блок-схема бортовой РЛС; на фиг.2 блок-схема блока ФРС; на фиг. 3 блок-схема блока УСС; на фиг.4 полученная на математической модели зависимость ошибки измерения скорости носителя РЛС от скорости его движения; на фиг.5 полученная на модели зависимость ошибки измерения скорости в зависимости от отношения мощности помех к мощности шума (при путевой скорости 140 м/с).
Предлагаемое устройство (фиг.1) содержит когерентный передатчик 1, передающую антенну 2 (которой может быть АР), М-элементную приемную антенную решетку 3, диаграммообразующий блок 4, N блоков 5 формирования разностных сигналов, первый N-канальный приемник 6, N блоков УСС 7, второй N-канальный приемник 8, первый N-канальный АЦП 9, блок 10 вычисления путевой скорости, второй N-канальный АЦП 11, блок 12 синхронизации.
Блок ФРС 5 (фиг.2) состоит из M/2 фазоинверторов (ФИ) 12, M/2-входов которых являются первыми M/2-входами блока ФРС 5 и соединены с соответствующими N/2-выходами ДОС 4, при этом M/2 выходов ФИ 13 соединены с первыми M/2 входами СУМ 14, вторыми M/2 входами которого являются соответствующие вторые M/2-выходов ДОС 4, являющиеся одновременно вторыми M/2-входами блока ФРС 5, причем выход СУМ 14 является выходом блока ФРС 5.
Блок УСС 7 (фиг.3) состоит из первой линии задержки (ЛЗ) 15, вход которой является вторым входом блока УСС 7 и соединен с первым входом СУМ 16, первого коррелятора (К) 17, первый вход которого соединен с выходом первой ЛЗ 15 и первым входом первого умножителя (У) 18, выход которого соединен с вторым входом СУМ 16, третий вход которого соединен с выходом второго У 19, первый вход которого является первым входом блока УСС 7 и соединен с первым входом второго КОР 20, выход которого соединен с вторым входом второго У 19. При этом второй вход второго КОР 20 является вторым выходом блока УСС 7 и соединен с вторым входом первого коррелятора 17 и первым входом третьего КОР 21, выход которого соединен с первым входом третьего У 22, второй вход которого соединен с вторым входом третьего К 21 и выходом второй ЛЗ 23, вход которой соединен с первым входом блока УСС 7. При этом выход третьего У 22 соединен с четвертым входом СУМ 16, причем выход первого К 17 соединен с вторым входом первого У 18 и является первым выходом блока УСС 7.
Предлагаемое устройство работает следующим образом. Когерентный передатчик 1 формирует импульсные сигналы с периодом повторения Tп, которые с помощью передающей антенны 2 излучаются в сторону подстилающей поверхности, отраженные сигналы поступают на М-элементную приемную АР 3, с выходов которой сигналы поступают в блок 4, который может быть выполнен в виде матрицы Батлера и с помощью которого образуются сигналы, скорректированные по фазе и соответствующие N лучам ДН (суммарные сигналы).
Сигналы с промежуточных выходов блока 4 (с выходов до сумматоров) поступают в блоки 5, в которых формируются разностные сигналы, которые наряду с суммарными выходными сигналами блока 4 усиливаются, фильтруются и стробируются во втором приемнике и первом приемнике и поступают на соответствующие входы блоков УСС 7, в которых происходит подавление паразитных сигналов, принимаемых по боковым лепесткам, обужение главного лепестка и измерение разности фаз сигналов, отраженных от подстилающей поверхности и отстоящих друг от друга на временной интервал, равный Т.
ЛЗ 15 обеспечивает временную задержку, равную Т, вторая ЛЗ 23 2Тп. Сигналы, соответствующие разностям фаз, оцифровываются АЦП 9 и поступают в блок 10, где производится расчет путевой скорости ЛА в соответствии с формулой
v 
 , где N количество лучей ДН приемной АР;
, где N количество лучей ДН приемной АР;
λ длина волны;
Тп период повторения зондирующих импульсных сигналов;
ϕi разность фаз, измеряемая в i-м блоке углоскоростной селекции;
γi угол между вектором скорости и направлением максимума i-го парциального луча диаграммы направленности приемной антенной решетки.
Со вторых выходов блоков УСС 7 сигналы с подавленными помеховыми составляющими оцифровываются в АЦП 11, поступают в ВУ 10 и используются для обнаружения целей и отслеживания их траекторий. УС 12 осуществляет синхронизацию ПРД 1 и второго ПРМ 6 и первого ПРМ 8.
На ПЭВМ проведено моделирование РЛС и выполнены расчеты по оценке точности измерений путевой скорости. Результаты расчетов для случая работы РЛС в метровом диапазоне длин волн приведены на фиг.4 и 5. Корреляционные (наиболее точные) измерители путевой скорости, работающие в оптическом диапазоне длин волн, обеспечивают точность измерения 01,-0,3% а в радиодиапазоне единицы и десятки процентов. Таким образом, измерения путевой скорости в радиодиапазоне с помощью предлагаемого устройства проводятся с большей точностью, что является дополнительным преимуществом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА ВЫБОРКОЙ АМПЛИТУД | 1997 |
|
RU2117963C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ СТАНЦИЯ ПОМЕХ | 2012 |
|
RU2545168C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ ВЫСОТЫ ОБЪЕКТА ПОИСКА В ОБЗОРНЫХ НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ | 2013 |
|
RU2530542C1 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |

Использование: радиолокация и радионавигации, в частности в обзорных радиолокаторах. Сущность изобретения: устройство содержит когерентный передатчик 1, передающую антену 2, M-элементную приемную решетку 3, диаграммообразующий блок 4, N блоков 5 формирования разностных сигналов, 2N-канальных приемников 6, N блоков 7 углоскоростной селекции, два аналого-цифровых преобразователя 9, 11, блок 10 вычисления путевой скорости, блок 12 синхронизации. Это позволяет измерить путевую скорость фазовым методом. 5 ил.
САМОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, содержащая когерентный передатчик, выход которого соединен с входом передающей антенны, M-элементную приемную антенную решетку, M выходов которой соединены с M входами диаграммообразующего блока, первый N-канальный приемник, первый N-канальный аналого-цифровой преобразователь, блок вычисления путевой скорости, блок синхронизации, отличающаяся тем, что в нее введены N блоков формирования разностных сигналов, второй N-канальный приемник, N блоков углоскоростной селекции, второй N-канальный аналого-цифровой преобразователь, при этом первые N · M выходов диаграммообразующего блока соединены с N · M соответствующими входами N блоков формирования разностных сигналов, выходы которых соединены с N входами второго N-канального приемника, N выходов которого соединены с первыми входами N блоков углоскоростной селекции, первые N выходов которых соединены с N входами первого N-канального аналого-цифрового преобразователя, N выходов которого соединены с первыми N входами блока вычисления путевой скорости, при этом вторые N выходов диаграммообразующего блока соединены с N входами первого N канального приемника, N выходов которого соединены с вторыми входами блоков углоскоростной селекции, вторые выходы которых соединены с входами второго N канального аналого-цифрового преобразователя, N выходов которого соединены с вторыми N входами блока вычисления путевой скорости, первый выход блока синхронизации соединен с входом передатчика, второй выход - с (N + 1)-ми входами первого и второго N-канальных приемников, при этом величина V путевой скорости вычисляется по формуле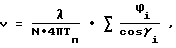
где N количество лучей диаграммы направленности M-элементной приемной антенной решетки;
λ длина волны;
Tп период повторения зондирующих импульсов сигналов;
vi разность фаз, измеряемая в i-м блоке углоскоростной селекции;
γi угол между вектором скорости и направлением максимума i-го парциального луча диаграммы направленности M-элементной приемной антенной решетки.
| Основы загоризонтной радиолокации | |||
| Под ред | |||
| Колосова А.А | |||
| М.: Радио и связь, 1984, с.242. |
