Изобретение относится к области радиолокации, в частности к наземно-космическим радиолокационным комплексам.
В настоящее время одной из актуальнейших задач является обеспечение контроля воздушного и космического пространства в разнесенных больших по размерам зонах. Эта задача наиболее эффективно может быть решена при размещении передатчиков зондирующего сигнала на космических аппаратах на околоземной орбите.
Известна «Система обнаружения и измерения координат целей» (свидетельство РФ №25098, МПК G01S 13/06, 12.04.2002, автор Олейников Л.Ф.), содержащая передатчик импульсных радиосигналов, установленный на космическом аппарате на геостационарной или околоземной орбите, разнесенные стационарные или мобильные приемные устройства, установленные на водном, сухопутном или воздушном транспорте, и общий центр обработки радиосигналов, который соединен линиями связи с приемными устройствами.
Кроме этого, известна еще одна «Наземно-космическая радиолокационная система» (свидетельство РФ №36147, МПК G01S 13/06, 11.11.2003, авторы: Олейников Л.Ф., Бендерский Г.П., Ляхов Н.А., Вальшонок З.С). Данная многопозиционная система содержит передатчик космического базирования, режимы работы которого задаются с наземной станции управления, и разнесенные приемные устройства наземного, водного или космического базирования, синхронизируемые сигналами передатчика и соединенные с центральной станцией обработки радиолокационных сигналов через космическую линию связи.
Обе представленные выше разнесенные наземно-космические радиолокационные системы работают по традиционному способу моностатической радиолокации, при котором происходит зондирование зоны обнаружения сигналом передатчика и прием и обработка сигналов, отраженных от воздушных объектов.
Большинство известных радиолокационных средств, основанных на традиционных способах моностатической радиолокации (в том числе наземно-космические радиолокационные системы-аналоги), из-за слабости отраженного сигнала малоэффективны для обнаружения сверхмалоразмерных и низколетящих воздушных и воздушно-космических объектов с малой эффективной площадью рассеяния (ЭПР), а также объектов с радиопоглощающими покрытиями, в частности объектов, изготовленных по технологии «Стелс».
Для реализации глобальной системы контроля космического пространства необходимо размещение передатчиков на высокоэллиптической или геостационарной орбитах. При этом передатчики находятся на расстояниях около 40 тысяч километров до Земли и приземного слоя. Это исключает радиолокацию указанных объектов традиционной моностатической радиолокацией.
Кроме того, в результате значительных флюктуаций эхо-сигнала и электромагнитной длины трассы происходит уменьшение вероятности обнаружения и ухудшение точностных характеристик.
Для повышения эффективности обнаружения целей можно увеличить мощность передатчика. Однако для обнаружения сверхмалоразмерных целей необходимая средняя мощность достигает сотни мегаватт.
Еще одним недостатком, обусловленным импульсным зондированием, является необходимость синхронизации приемных устройств относительно сигнала передатчика.
В условиях повышения летно-технических характеристик средств воздушного нападения (СВН), а именно снижения отражательных свойств целей при реализации технологии «Стелс», возрастания скоростей, расширения диапазона используемых высот полета объектов от предельно малых до космических возникает необходимость изыскания других физических принципов обнаружения, сопровождения и распознавания СВН и создания на их основе новых средств радиолокации.
Одним из возможных направлений создания средств обнаружения воздушных и воздушно-космических объектов является использование бистатического метода локации «на просвет». Использование этого метода позволяет реализовать уникальные свойства радиолокации «на просвет» - полную нечувствительность к наличию радиопоглощающего покрытия (технология «Стелс») у объекта и резкое, на 3-4 порядка, увеличение, по сравнению с моностатической радиолокацией, величины ЭПР, что существенно повышает вероятность обнаружения объектов, позволяя при этом значительно снизить мощность передатчика по сравнению с моностатической РЛС. Кроме того, исключаются требования к синхронизации приемных и передающих устройств, отсутствует зависимость характеристик «просветных» радиолокационных комплексов от флюктуации ЭПР целей и электромагнитной длины трассы.
Примером использования метода локации «на просвет» может служить многозвенный радиолокационный комплекс (МРЛК), представленный в Евразийской заявке №200501120 от 19.07.2005, патент №007857, авторы Бляхман А.Б., Самарин А.В.
Многозвенный радиолокационный комплекс с обнаружением «на просвет» состоит из N≥2 приемопередающих постов (ППП), расположенных на местности по контуру любой конфигурации и протяженности, и выносного рабочего места оператора, связанного с «ведущим» ППП по каналу связи. «Ведущим» может быть любой из ППП. Недостатком такого комплекса является ограниченная зона обнаружения. Механическое увеличение количества ППП позволяет увеличить зону обнаружения по площади, но не по высоте.
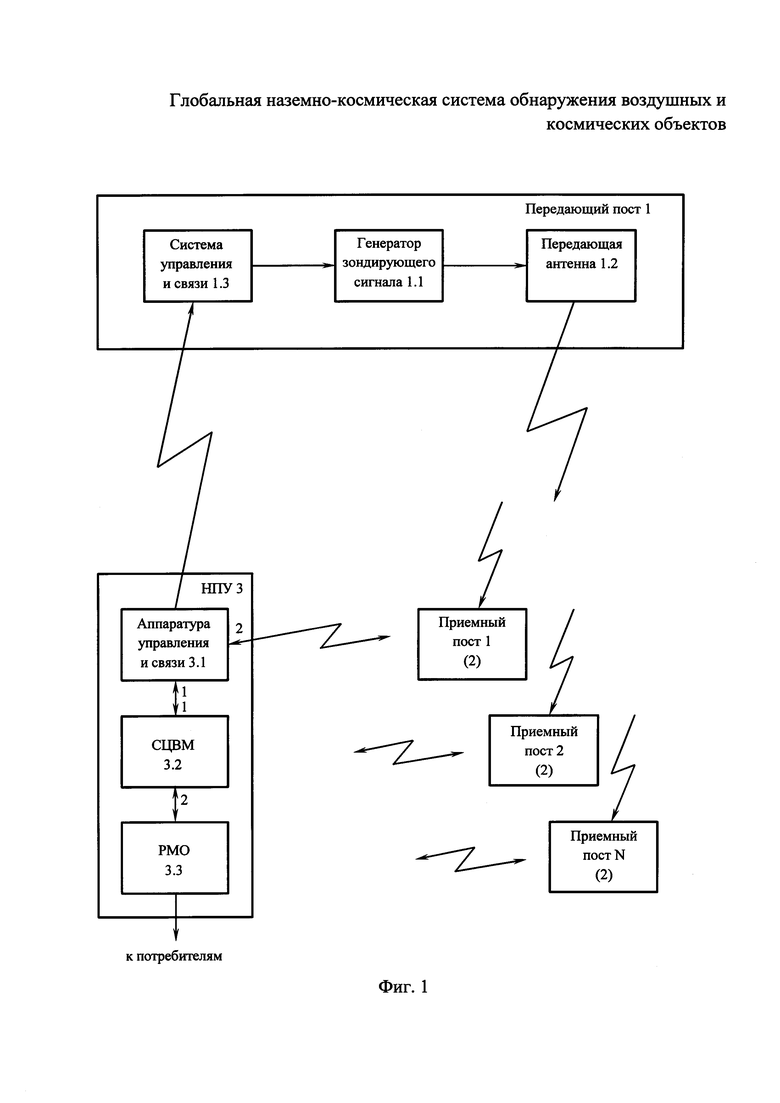
Значительно увеличить зону обнаружения по площади и по высоте возможно путем создания наземно-космического комплекса радиолокации «на просвет» с размещением одного из постов на борту космического аппарата, находящегося на геостационарной, высокоэллиптической или околоземной орбитах. Такой наземно-космический радиолокационный комплекс представлен в патенте РФ на изобретение №2324951 от 10.01.2006, авторы Бляхман А.Б., Самарин А.В. и принят за прототип (фиг. 1).
Наземно-космический радиолокационный комплекс содержит передающий пост 1 космического базирования, один или несколько стационарных или мобильных приемных постов 2 и наземный пункт управления (НПУ) 3.
Передающий пост 1 состоит из последовательно соединенных системы управления и связи 1.3, генератора зондирующего сигнала 1.1 и передающей антенны 1.2.
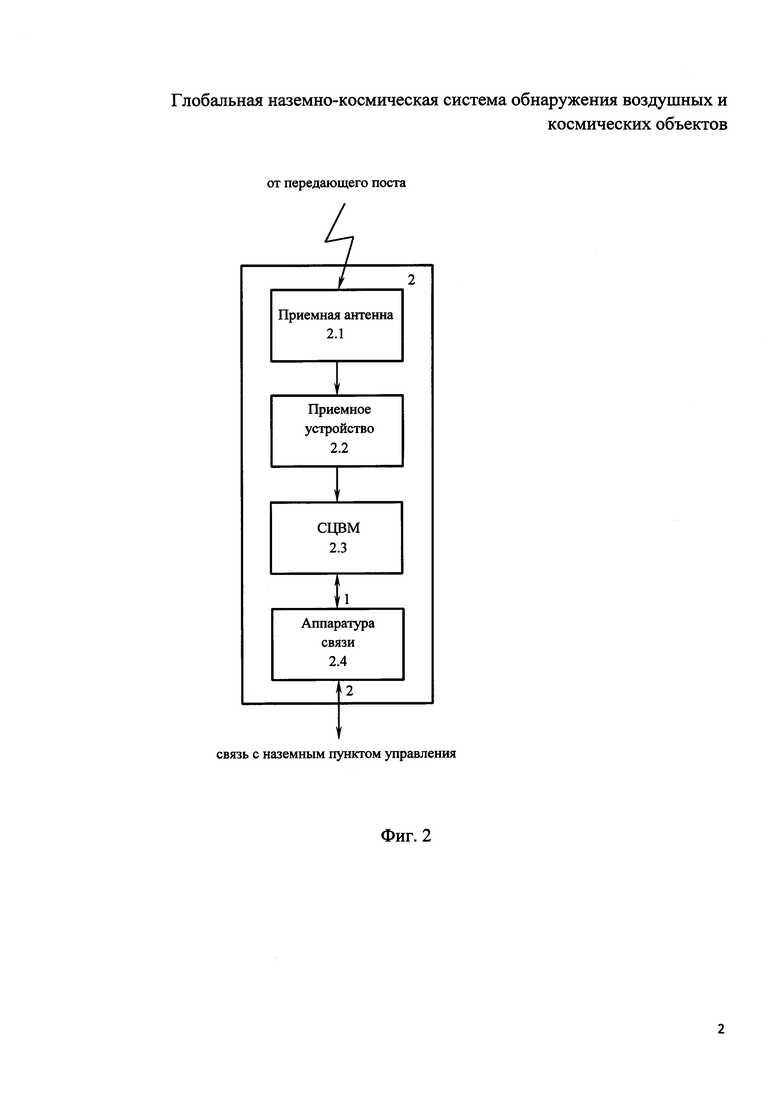
Каждый приемный пост 2 (фиг. 2) состоит из последовательно соединенных многолучевой приемной антенны 2.1, направленной на передающий пост 1, приемного устройства 2.2, специализированной цифровой вычислительной машины (СЦВМ) 2.3 и аппаратуры связи 2.4. При этом выход приемного устройства 2.2 соединен с входом СЦВМ 2.3 приемного поста 2. Данная СЦВМ 2.3 обладает возможностью функционально преобразовывать измеренные параметры воздушных и космических объектов в пространственные координаты и распознавать классы обнаруживаемых и сопровождаемых объектов. Вход-выход СЦВМ 2.3 соединен с первым входом-выходом аппаратуры связи 2.4.
НПУ 3 состоит из аппаратуры управления и связи 3.1, СЦВМ 3.2 и рабочего места оператора (РМО) 3.3. Аппаратура управления и связи 3.1 обеспечивает прием информации с приемных постов 2 и управление приемными 2 и передающим 1 постами. Первый вход-выход аппаратуры управления и связи 3.1 соединен с первым входом-выходом СЦВМ 3.2, предназначенной для отображения обработанной информации со всех приемных постов 2 на экране монитора. Второй вход-выход СЦВМ 3.2 соединен с входом-выходом РМО 3.3, выход которого является выходом всего комплекса.
Выход аппаратуры управления и связи 3.1 по линиям связи соединен с системой управления и связи 1.3 передающего поста 1, ее второй вход-выход - со вторым входом-выходом аппаратуры связи 2.4 каждого приемного поста 2.
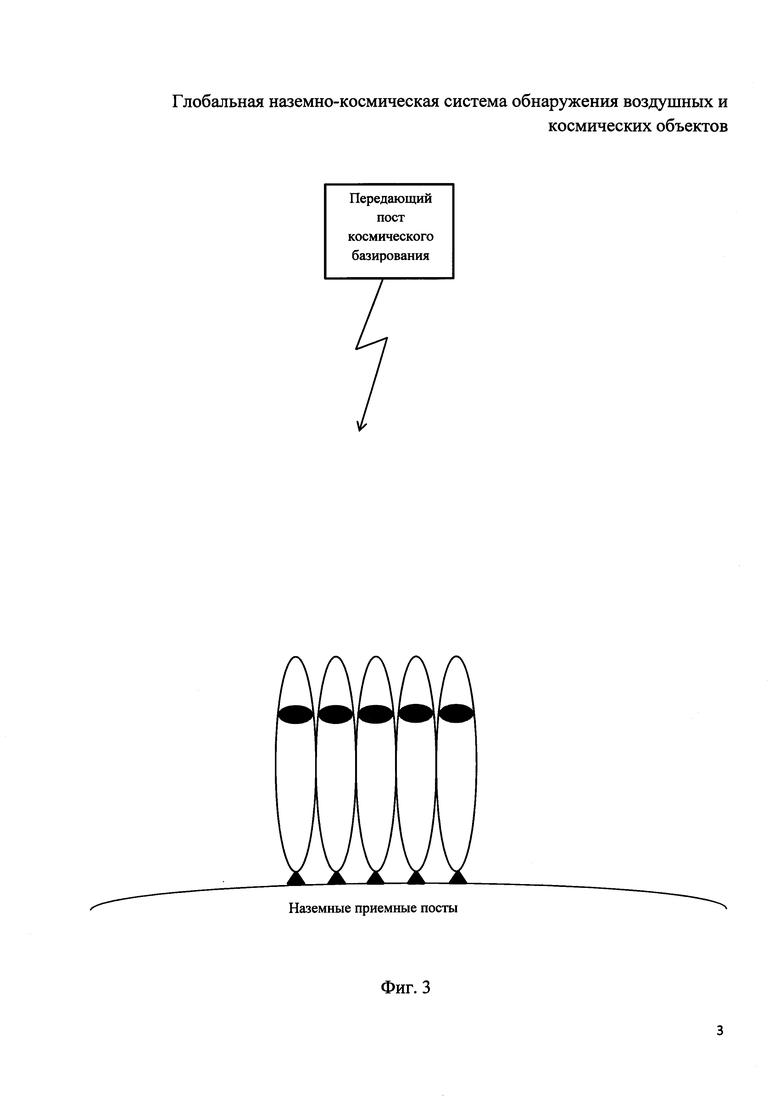
Недостатком такого комплекса является относительно узкая зона обнаружения, определяемая «просветной» областью между передающим постом космического базирования и наземными приемными постами. Зона обнаружения представляет собой группу «столбов» над наземными приемными постами, вытянутыми в сторону передающего поста космического базирования (фиг. 3). Зона обнаружения отдельного приемного поста составляет по угловым координатам сектор с шириной не более ±20° относительно направления на передатчик космического базирования.
Значительно увеличить зону обнаружения каждого приемного комплекса (в прототипе - приемного поста) по угловым координатам до величины ±90° относительно нормали к поверхности земли возможно путем наращивания группировки передающих комплексов (в прототипе - передающих постов) на околоземной орбите, обеспечивающей сплошную зону обнаружения по углу места, организации приема сигналов от всех передающих комплексов за счет многоканального по частоте приемного устройства (соответственно частотам передающих комплексов) и формирования многолучевой пространственной диаграммы направленности приемными комплексами, закрывающей всю верхнюю полусферу (±90° по углу места).
Техническим результатом предлагаемой глобальной наземно-космической системы обнаружения воздушных и космических объектов является значительное увеличение зоны обнаружения каждого приемного комплекса по угловым координатам до величины ±90° относительно нормали к поверхности земли, в том числе для малоразмерных объектов и объектов, выполненных по технологии «Стелс».
Указанный результат достигается тем, что в систему-прототип, включающую передающий комплекс космического базирования, состоящий из системы управления и связи, первым выходом соединенной со входом генератора зондирующего сигнала, и передающей антенны, один или несколько наземных стационарных или мобильных приемных комплексов, состоящих из приемной антенны, вход которой по линиям связи соединен с выходом передающей антенны, приемного устройства, соединенного с СЦВМ приемного комплекса, вход-выход которой подключен к первому входу-выходу аппаратуры управления и связи приемного комплекса, и наземный пункт управления, состоящий из аппаратуры управления и связи, обеспечивающей прием информации с передающих и приемных комплексов и управление ими, второй вход-выход которой соединен с первым входом-выходом СЦВМ наземного пункта управления, вторым входом-выходом подключенной к входу-выходу рабочего места оператора, выход которого является выходом всей системы, первый вход-выход аппаратуры управления и связи наземного пункта управления по линиям связи соединен с входом-выходом системы управления и связи передающего комплекса, а третий ее вход-выход - со вторым входом-выходом аппаратуры управления и связи каждого приемного комплекса, введены дополнительные передающие комплексы, размещенные на космических аппаратах на околоземной орбите с угловым сдвигом α=360°/M, где M - общее количество передающих комплексов, причем в каждый передающий комплекс введены блок кодировки навигационных параметров, выход которого подключен к первому входу передающей антенны, первый вход - к выходу генератора зондирующего сигнала, а второй вход - к выходу системы навигации, выходом подключенной также ко входу системы управления и связи передающего комплекса, второй выход которой через систему ориентирования соединен со вторым входом передающей антенны, в состав каждого приемного комплекса введены диаграммообразующая схема, 1…p выходы которой подключены соответственно к 1…p входам приемного устройства, выполненного многоканальным по частоте и пространству, 1…p выходы которого соединены с 1…p входами СЦВМ, 1…k входы диаграммообразующей схемы подключены к 1…k выходам приемной антенны, управляющий вход диаграммообразующей схемы - к первому выходу блока управления лучами диаграммы направленности (ДН) антенны и частотами приема, второй выход которого соединен с управляющим входом многоканального приемного устройства, а вход - с выходом аппаратуры управления и связи приемного комплекса.
СЦВМ приемного комплекса обладает возможностью функционально преобразовывать измеренные параметры воздушных и космических объектов в пространственные координаты и распознавать классы обнаруженных и сопровождаемых объектов.
СЦВМ наземного пункта управления предназначена для отображения обработанной информации со всех приемных комплексов на экране монитора.
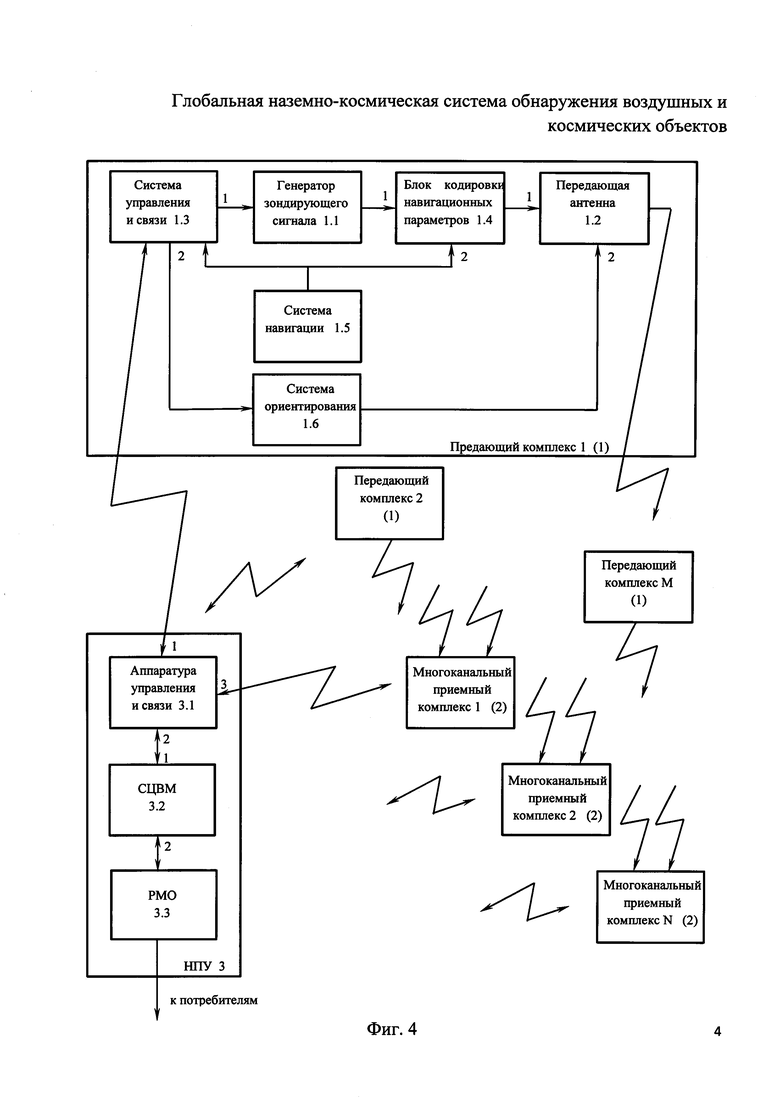
На фиг. 4 представлена структурная схема глобальной наземно-космической системы обнаружения воздушных и космических объектов (ГЛОНКОС), где приняты следующие обозначения:
1 - передающие комплексы;
1.1 - генератор зондирующего сигнала;
1.2 - передающая антенна;
1.3 - система управления и связи;
1.4 - блок кодировки навигационных параметров;
1.5 - система навигации;
1.6 - система ориентирования;
2 - многоканальные приемные комплексы;
3 - наземный пункт управления (НПУ);
3.1 - аппаратура управления и связи;
3.2 - специализированная цифровая вычислительная машина (СЦВМ);
3.3 - рабочее место оператора (РМО).
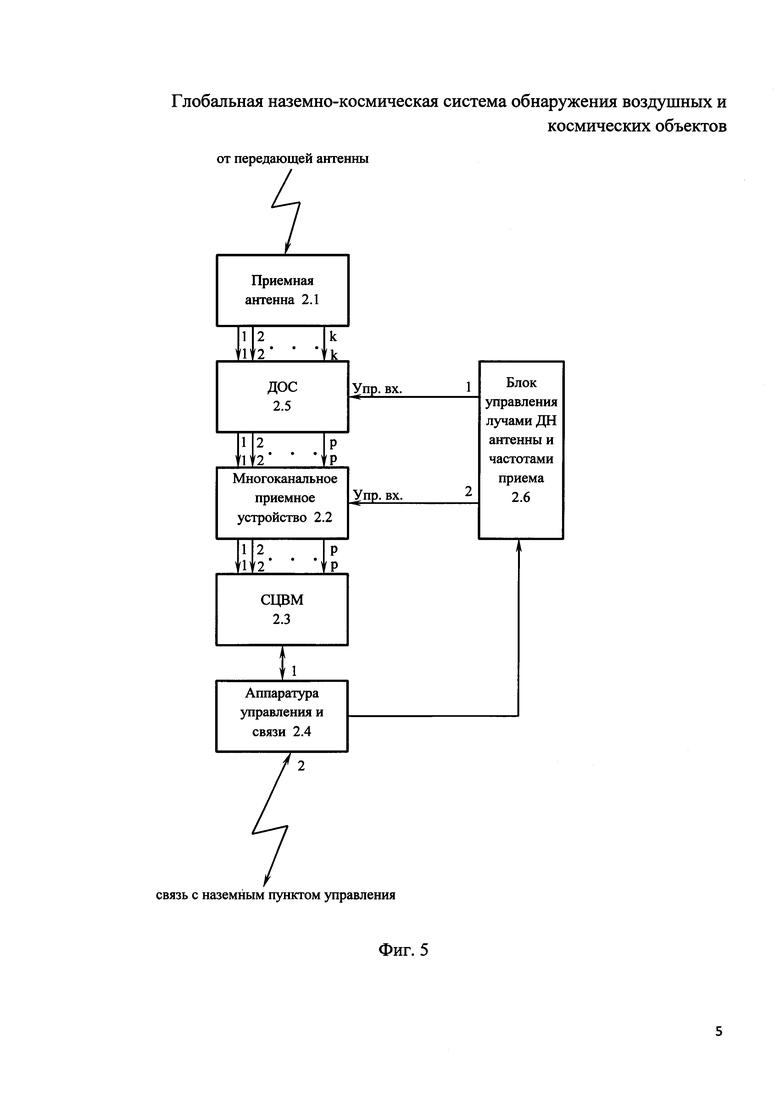
На фиг. 5 представлена структурная схема каждого многоканального приемного комплекса 2 и приняты следующие обозначения:
2.1 - приемная антенна;
2.2 - многоканальное приемное устройство;
2.3 - СЦВМ;
2.4 - аппаратура управления и связи;
2.5 - диаграммообразующая схема (ДОС);
2.6 - блок управления лучами ДН антенны и частотами приема.
Предлагаемая ГЛОНКОС содержит сеть из передающих комплексов 1
космического базирования на околоземной орбите, разнесенные многоканальные приемные комплексы 2 и НПУ 3.
Функциональное назначение передающих комплексов 1 космического базирования - генерация зондирующего сигнала. Космические аппараты (КА) системы ГЛОНКОС размещаются на околоземной орбите, плоскость которой максимально приподнята над защищаемой территорией. Количество (M) КА на орбите определяется необходимостью создания сплошного радиолокационного поля над защищаемой территорией.
На борту каждого КА находится передающий комплекс 1, состоящий из системы управления и связи 1.3, первым выходом соединенной со входом генератора зондирующего сигнала 1.1, выход которого подключен к первому входу блока кодировки навигационных параметров 1.4, выходом соединенного с первым входом передающей антенны 1.2, а также системы навигации 1.5, выход которой соединен с входом системы управления и связи 1.3 и со вторым управляющим входом блока кодировки навигационных параметров 1.4, второй выход системы управления и связи 1.3 через систему ориентирования 1.6 соединен со вторым входом передающей антенны 1.2.
Сеть приемных комплексов состоит из N многоканальных приемных комплексов 2, которые могут быть стационарными или мобильными, располагаться на наземном, водном или воздушном транспорте.
Каждый многоканальный приемный комплекс 2 состоит из приемной антенны 2.1, 1…k выходами подключенной к 1…k входам ДОС 2.5, 1…p выходы которой соединены с 1…p входами многоканального приемного устройства 2.2, подключенного к 1…p входам СЦВМ 2.3, вход-выход которой соединен с первым входом-выходом аппаратуры управления и связи 2.4, выходом соединенной со входом блока управления лучами ДН антенны и частотами приема 2.6, первый выход которого подключен к управляющему входу (упр. вх.) ДОС 2.5, а второй выход - к управляющему входу (упр. вх.) многоканального приемного устройства 2.2.
НПУ 3 содержит аппаратуру управления и связи 3.1, второй вход-выход которой подключен к первому входу-выходу СЦВМ 3.2, вторым входом-выходом соединенной с входом-выходом рабочего места оператора (РМО) 3.3, выход которого является выходом всей системы.
НПУ 3 осуществляет связь с передающими 1 и многоканальными приемными 2 комплексами, прием и отображение информации с приемных комплексов 2, передачу обработанной информации потребителям.
Вход-выход системы управления и связи 1.3 каждого передающего комплекса 1 по линиям связи соединен с первым входом-выходом аппаратуры управления и связи 3.1 НПУ 3. Вход приемной антенны 2.1 каждого приемного комплекса 2 по линиям связи соединен с выходом передающей антенны 1.2 тех передающих комплексов 1, в зоне прямой видимости которых в данное время они находятся. Третий вход-выход аппаратуры управления и связи 3.1 соединен со вторым входом-выходом аппаратуры управления и связи 2.4 каждого многоканального приемного комплекса 2.
Принцип работы заявляемой ГЛОНКОС заключается в следующем.
Передающие комплексы 1, расположенные на КА, работают на своей выделенной частоте. С первого выхода системы управления и связи 1.3 сигнал управления поступает на вход генератора зондирующего сигнала 1.1, с выхода которого зондирующий сигнал поступает на первый вход блока кодировки навигационных параметров 1.4.
Сигнал с выхода системы навигации 1.5, содержащий навигационные параметры КА, на борту которого находится данный передающий комплекс, поступает на вход системы управления и связи 1.3 и на второй вход блока кодировки навигационных параметров 1.4, с выхода которого поступает на первый вход передающей антенны 1.2.
Навигационная информация KA через систему управления и связи 1.3 с каждого передающего комплекса 1 поступает на НПУ 3, с которого на передающий комплекс 1 поступают сигналы управления рабочими частотами передающих комплексов и параметрами ориентирования передающей антенны.
Со второго выхода системы управления и связи 1.3 подается сигнал на вход системы ориентирования 1.6, с выхода которой сигнал управления положением луча подается на второй вход передающей антенны 1.2.
Система навигации 1.5 и система ориентирования 1.6 являются типовой штатной аппаратурой КА.
Передающая антенна 1.2 облучает околоземное пространство в требуемом угловом секторе. В случае появления воздушного или космического объекта в данном секторе соответствующие сигналы от этого объекта принимаются приемными антеннами 2.1 тех многоканальных приемных комплексов 2, в зоне видимости которых эти объекты находятся. Центральный луч ДН приемных антенн 2.1 своим максимумом направлен на передающую антенну 1.2.
КА, носители передающих комплексов 1, размещены на околоземной орбите с угловым сдвигом α=360°/M (M - количество КА в космическом сегменте ГЛОНКОС). Плоскость орбиты обеспечивает максимальное по времени нахождение КА над требуемой зоной обнаружения.
Число многоканальных приемных комплексов 2 определяется требуемыми размерами зоны обнаружения. К основным задачам многоканальных приемных комплексов 2 относятся: прием суммарного сигнала, состоящего из прямого сигнала, непосредственно поступающего от передающего комплекса на вход приемного комплекса, и эхо-сигнала от цели, определение по суммарному сигналу наличия или отсутствия цели в зоне обнаружения комплекса, при обнаружении цели - определение по интерференционному сигналу его первичных параметров и определение текущего местоположения цели по первичным параметрам. Указанная процедура обнаружения и измерения параметров целей производится для любой пары:
«Передатчик i (i=1…M) - Приемник j (j=1…N)».
Таким образом, имеем набор бистатических ячеек, образованных всевозможными парами «передающий комплекс i - приемный комплекс j», находящимися в пределах прямой видимости. Каждая ячейка образует бистатическую радиолокационную систему с обнаружением «на просвет» как отдельную ячейку наземно-космического радиолокационного комплекса. Поэтому для определения координат целей могут быть применены методы и алгоритмы известных наземных бистатических комплексов с обнаружением «на просвет», например, МРЛК, представленном в Евразийской заявке №200501120 от 19.07.2005, патент №007857, авторы Бляхман А.Б., Самарин А.В.
Каждый многоканальный приемный комплекс 2 формирует многоканальную ДН антенны, которая позволяет работать со всеми передающими комплексами 1, находящимися в данное время в зоне прямой видимости данного приемного комплекса 2. Каждый многоканальный приемный комплекс 2 имеет многоканальное приемное устройство 2.2, настроенное на частоты передающих комплексов 1.
Алгоритмы работы приемного комплекса 2 аналогичны алгоритмам работы приемного поста комплекса-прототипа.
Приемная антенна 2.1 приемного комплекса типа фазированная антенная решетка (ФАР). Количество элементов антенной решетки k=kx×ky,
где kx - количество элементов в строке ФАР;
ky - количество элементов в столбце ФАР.
Принятые от цели сигналы с 1…k выходов приемной антенны 2.1 поступают на 1…k входы ДОС 2.5, на выходе которой формируются лучи диаграммы направленности антенны приемного комплекса, количество которых p=q×r,
где q - количество групп лучей (по числу передающих комплексов в зоне радиолокационной видимости приемного комплекса), центральный луч каждой группы направлен на соответствующий передающий комплекс;
r - количество лучей в каждой группе.
В 1…p каналах многоканального приемного устройства 2.2 выделяются доплеровские биения частоты сигнала, возникающие при движении воздушных или космических объектов в просветной зоне между передающим комплексом i (i=1, …, M) и приемным комплексом j (j=1, …, N). Сигналы в многоканальном приемном устройстве 2.2 усиливаются, подвергаются предварительной обработке и преобразуются в цифровую форму.
Кроме того, в многоканальном приемном устройстве 2.2 осуществляется режекция прямого сигнала передающего комплекса 1 и сигналов пассивных помех. Сигналы с приемных каналов, преобразованные в цифровую форму, поступают в СЦВМ 2.3 и далее на аппаратуру управления и связи 2.4.
Параметры траектории воздушных и космических объектов, пространственные координаты определяются с помощью вычислительных алгоритмов в СЦВМ 2.3 приемных комплексов.
В СЦВМ 2.3 реализуются следующие алгоритмы обработки:
- измерения первичных параметров воздушных и космических объектов;
- функционального преобразования измеренных параметров в пространственные координаты;
- сопровождения объектов;
- распознавания классов обнаруженных объектов.
С входа-выхода СЦВМ 2.3 сигнал поступает на первый вход-выход аппаратуры управления и связи 2.4. С выхода аппаратуры управления и связи 2.4 сигнал поступает на блок управления лучами ДН антенны и частотами приема 2.6, в котором, исходя из полученных навигационных параметров, происходит пересчет навигационных параметров в параметры углового положения передающих комплексов 1, относительно данного приемного комплекса 2. В ДОС 2.5 происходит формирование групп лучей ДН антенны, центральный луч каждой из которых направлен на один из передающих комплексов 1, находящийся в зоне видимости данного приемного комплекса 2. Исходя из информации о рабочих частотах передающих комплексов 1, каналы многоканального приемного устройства 2.2 переключаются на соответствующие рабочие частоты. Таким образом, каждый канал многоканального приемного устройства 2.2 настроен на одну из рабочих частот передающего комплекса 1 и соединен с соответствующим выходом ДОС 2.5 антенной системы.
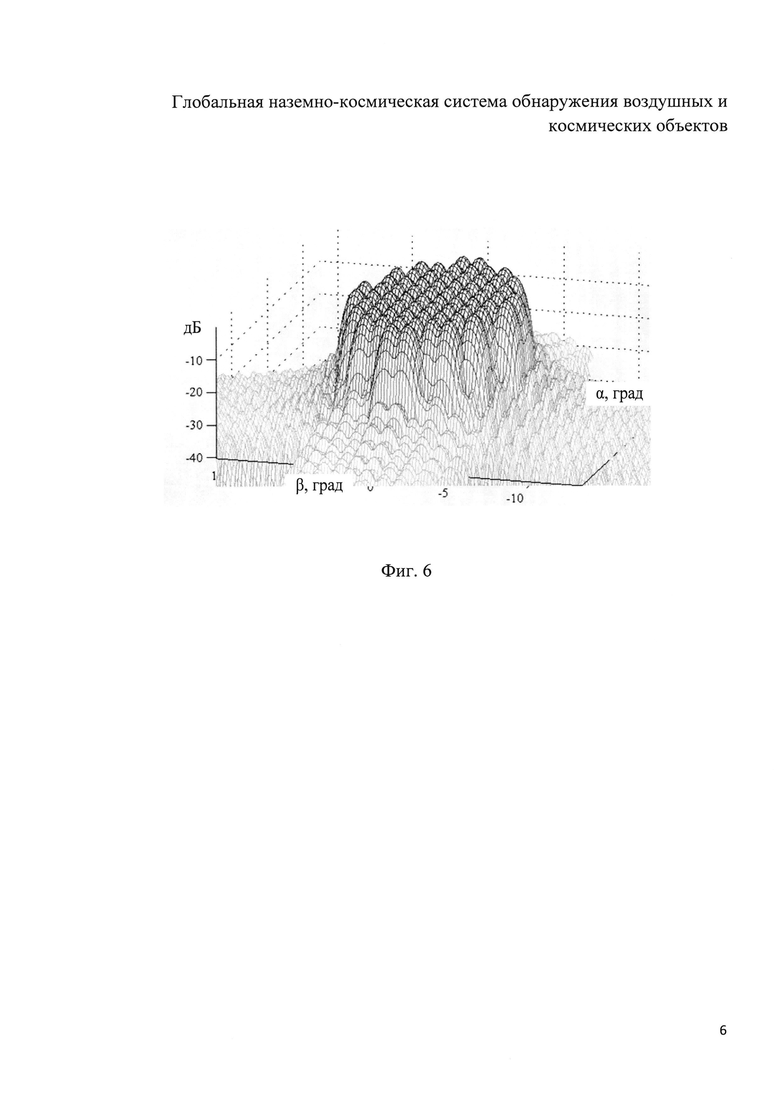
На фиг. 6 показаны лучи ДН приемной антенны, сформированные для обеспечения зоны обнаружения в пределах угла дифракции 5°. Соседние лучи перекрываются по уровню минус 3 дБ. Центральный луч одной из групп лучей ДН антенны направлен на один из передающих комплексов 1. Количество таких групп лучей ДН антенны должно быть равно количеству передающих комплексов 1, находящихся в пределах прямой видимости с данного приемного комплекса 2. Количество лучей ДН антенны в группе определяется зоной обнаружения по угловым координатам в пределах действия просветного эффекта. Ширина луча ДН антенны определяет точность измерения угловых координат обнаруживаемых объектов.
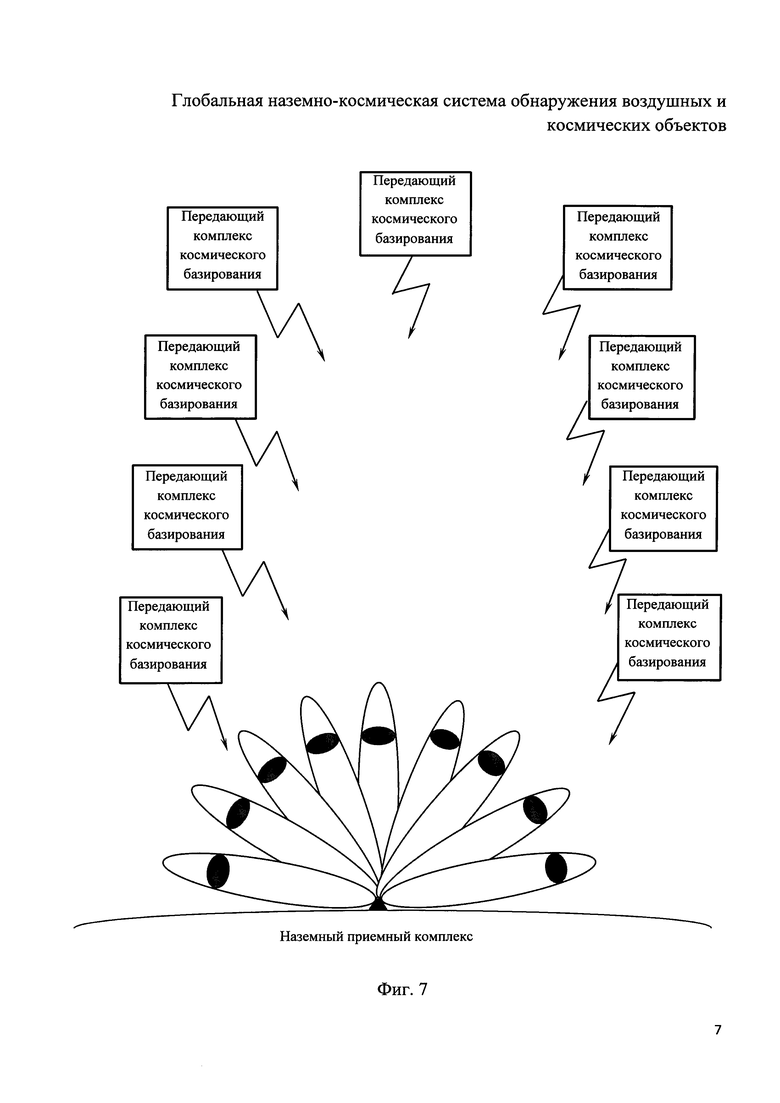
На фиг. 7 представлена зона обнаружения одного из многоканальных приемных комплексов системы ГЛОНКОС, работающего по сигналам нескольких передающих комплексов космического базирования.
Обработанная информация с аппаратуры управления и связи 2.4 всех многоканальных приемных комплексов 2 поступает на аппаратуру управления и связи 3.1 НПУ 3 и через СЦВМ 3.2 и РМО 3.3 передается потребителям и отображается на экране монитора РМО.
Обмен информацией между аппаратурой управления и связи 3.1 НПУ 3 и системой управления и связи 1.3 передающих комплексов 1 реализует:
- переключение рабочих точек генератора зондирующего сигнала 1.1;
- управление лучом передающей антенны 1.2 (позиционирование луча в нужное место земного шара);
- прием навигационных параметров КА передающих комплексов 1.
С НПУ 3 по линиям связи осуществляется управление приемными комплексами 2, передача навигационных параметров передающих комплексов 1 и их рабочих частот излучения зондирующего сигнала.
Высокий энергетический потенциал предлагаемой системы ГЛОНКОС позволяет обнаруживать головные и боевые блоки ракет и космические объекты на высотах и дальностях больших, чем в существующих системах, что позволяет существенно повысить достоверность информации системы предупреждения о ракетном нападении. На этих же принципах может быть создана система слежения за пусками ракет и полетами самолетов над территорией противника, причем эффективность обнаружения не зависит от наличия на целях радиопоглощающих покрытий («Стелс»-технология).
Луч каждого передающего комплекса 1 реализует «подсвет» большой территории земной поверхности, что обеспечивает его совместную работу со многими разнесенными по территории приемными комплексами 2, каждый из которых принимает сигналы со всех передающих комплексов 1 в пределах их радиолокационной видимости. Поэтому ГЛОНКОС может быть использована в качестве глобальной системы обнаружения, а также глобальной навигационной системы.
Многоканальные приемные комплексы 2 могут быть стационарными или мобильными, располагающимися на наземном, водном или воздушном транспорте, что позволяет обеспечить обзор любой территории земного шара, не нарушая государственных границ и не излучая с Земли никаких сигналов.
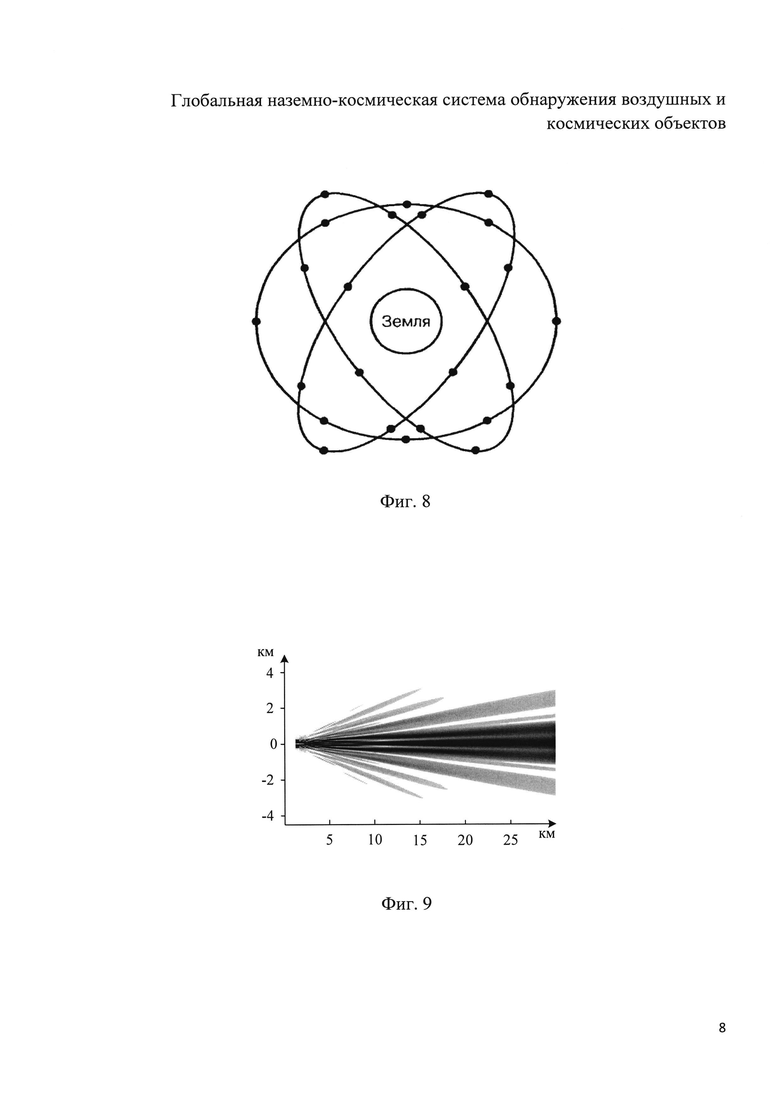
Предлагаемая система ГЛОНКОС на первом этапе своего становления может использовать в качестве космического сегмента передающих комплексов глобальную навигационную спутниковую систему ГЛОНАСС. Полная группировка КА системы ГЛОНАСС состоит из 24-х спутников, равномерно распределенных в трех орбитальных плоскостях (фиг. 8). Орбитальные плоскости разнесены относительно друг друга на 120° по абсолютной долготе восходящего узла. В каждой орбитальной плоскости расположено по 8 спутников со сдвигом по аргументу широты 45°, т.е. спутники в соседних орбитальных плоскостях смещены на 15° по аргументу широты. Орбиты спутников являются близкими к круговым, с высотой 18840…19440 км (номинальное значение 19100 км). Орбитальная структура сети спутников построена таким образом, что в каждой точке земной поверхности и околоземного пространства одновременно наблюдаются не менее четырех спутников. Мощность излучения 60 Вт. На фиг. 9 представлена зона обнаружения для комплекса с сигналом ГЛОНАСС цели типа БПЛА Pegasus. С увеличением мощности излучения площадь зоны обнаружения будет увеличиваться.
Таким образом, введение в прототип, содержащий передающий комплекс космического базирования, состоящий из системы управления и связи, генератора зондирующего сигнала и передающей антенны, один или несколько наземных стационарных или мобильных приемных комплексов, состоящих из приемной антенны, приемного устройства, СЦВМ приемного комплекса и аппаратуры управления и связи, и наземный пункт управления, состоящий из аппаратуры управления и связи, обеспечивающей прием информации с передающих и приемных комплексов и управление ими, СЦВМ наземного пункта управления, рабочего места оператора, выход которого является выходом всей системы, дополнительных передающих комплексов, размещенных на космических аппаратах на околоземной орбите с угловым сдвигом α=360°/M, где M - общее количество передающих комплексов, причем в каждый передающий комплекс введены блок кодировки навигационных параметров, система навигации и система ориентирования, в состав каждого приемного поста введены диаграммообразующая схема, блок управления лучами ДН антенны и частотами приема, причем приемное устройство выполнено многоканальным по частоте и пространству с соответствующими связями, позволило значительно увеличить зоны обнаружения каждого приемного комплекса по угловым координатам до величины ±90° относительно нормали к поверхности земли, в том числе для малоразмерных объектов и объектов, выполненных по технологии «Стелс».
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ ЗЕМЛИ | 2018 |
|
RU2703294C1 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| ОБЗОРНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ РЛС | 2020 |
|
RU2742392C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В НАЗЕМНО-КОСМИЧЕСКОЙ ПРОСВЕТНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2015 |
|
RU2608338C1 |
| МНОГОДИАПАЗОННЫЙ ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2497145C1 |
| МНОГОЦЕЛЕВАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2360848C1 |
| КОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2284550C2 |
Изобретение относится к области радиолокации, в частности к наземно-космическим радиолокационным комплексам. Техническим результатом является увеличение зоны обнаружения каждого приёмного комплекса по угловым координатам до величины ±90° относительно нормали к поверхности земли, в том числе для малоразмерных объектов и объектов, выполненных по технологии «Стелс». Для этого в систему введены дополнительные передающие комплексы, размещенные на космических аппаратах на околоземной орбите с угловым сдвигом α=360°/M, где M - общее количество передающих комплексов, причем в каждый передающий комплекс введены блок кодировки навигационных параметров, выход которого подключен к первому входу передающей антенны, первый вход - к выходу генератора зондирующего сигнала, а второй вход - к выходу системы навигации, выходом подключенной также ко входу системы управления и связи передающего комплекса, второй выход которой через систему ориентирования соединен со вторым входом передающей антенны, в состав каждого приемного комплекса введена диаграммообразующая схема. 9 ил.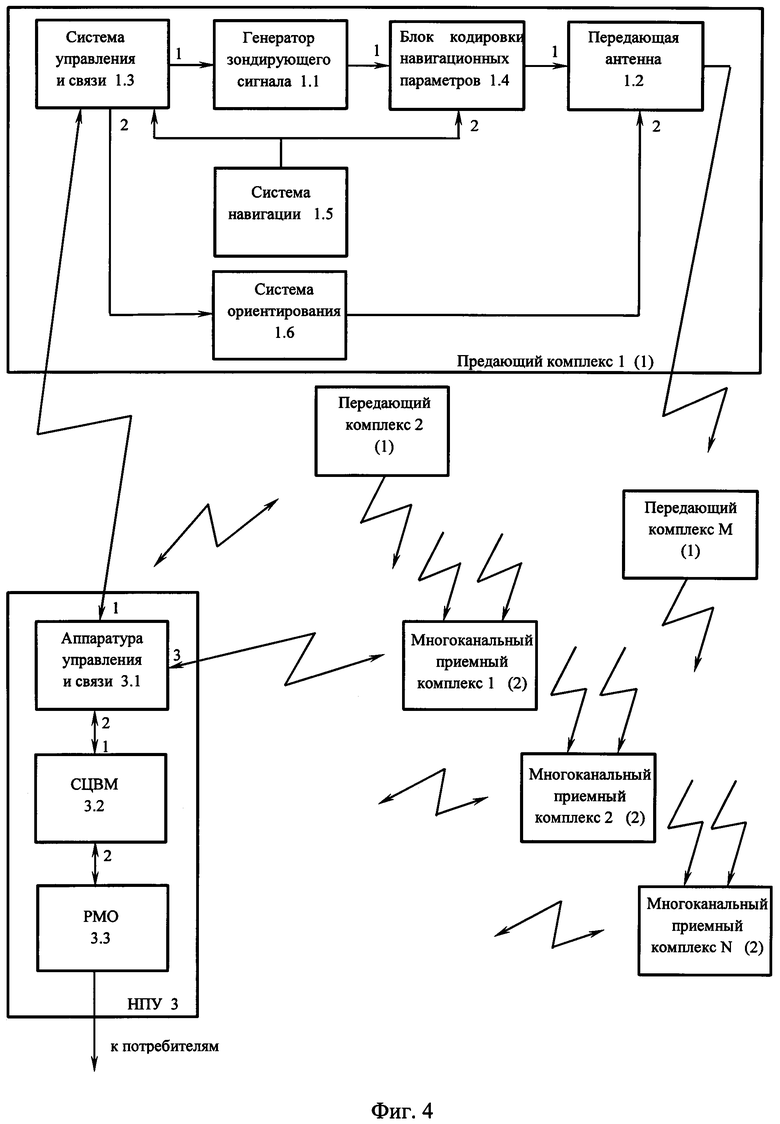
Глобальная наземно-космическая система обнаружения воздушных и космических объектов, содержащая передающий комплекс космического базирования, состоящий из системы управления и связи, первым выходом соединенной со входом генератора зондирующего сигнала, и передающей антенны, один или несколько наземных стационарных или мобильных приемных комплексов, состоящих из приемной антенны, вход которой по линиям связи соединен с выходом передающей антенны, приемного устройства, соединенного с СЦВМ приемного комплекса, обладающей возможностью функционально преобразовывать измеренные параметры воздушных и космических объектов в пространственные координаты и распознавать классы обнаруженных и сопровождаемых объектов, вход-выход СЦВМ подключен к первому входу-выходу аппаратуры управления и связи приемного комплекса, и наземный пункт управления (НПУ), состоящий из аппаратуры управления и связи, обеспечивающей прием информации с передающих и приемных комплексов и управление ими, второй вход-выход которой соединен с первым входом-выходом СЦВМ НПУ, предназначенной для отображения обработанной информации со всех приемных комплексов на экране монитора, второй вход-выход СЦВМ подключен к входу-выходу рабочего места оператора, выход которого является выходом всей системы, причем первый вход-выход аппаратуры управления и связи НПУ по линиям связи соединен с входом-выходом системы управления и связи передающего комплекса, а ее третий вход-выход - со вторым входом-выходом аппаратуры управления и связи каждого приемного комплекса, отличающаяся тем, что в нее введены дополнительные передающие комплексы, размещенные на космических аппаратах на околоземной орбите с угловым сдвигом α=360°/M, где M - общее количество передающих комплексов, причем в каждый передающий комплекс введены блок кодировки навигационных параметров, выход которого подключен к первому входу передающей антенны, первый вход - к выходу генератора зондирующего сигнала, а второй вход - к выходу системы навигации, выходом подключенной также ко входу системы управления и связи передающего комплекса, второй выход которой через систему ориентирования соединен со вторым входом передающей антенны, в состав каждого приемного комплекса введены диаграммообразующая схема, 1…p выходы которой подключены соответственно к 1…p входам приемного устройства, выполненного многоканальным по частоте и пространству, 1…p выходы которого соединены с 1…p входами СЦВМ, 1…k входы диаграммообразующей схемы подключены к 1…k выходам приемной антенны, управляющий вход диаграммообразующей схемы - к первому выходу блока управления лучами диаграммы направленности (ДН) антенны и частотами приема, второй выход которого соединен с управляющим входом многоканального приемного устройства, а вход - с выходом аппаратуры управления и связи приемного комплекса.
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US6111538A, 29.08.2000. | |||

