Изобретение предназначено для использования в радиолокационной технике, в частности в обзорных радиолокационных станциях (РЛС).
Обычно в обзорных РЛС, производящих обзор пространства, развертка луча осуществляется по азимуту. Для измерения азимута применяется метод максимума, который называют методом анализа огибающей.
При прохождении луча антенны через цель огибающая амплитуд принимаемого сигнала цели повторяет форму диаграммы направленности антенны (ДНА) (Теоретические основы радиолокации под ред. В.Е.Дулевич.- М.: Сов.радио, 1964, с.430).
Анализ огибающей принимаемого сигнала дает возможность зафиксировать максимум амплитуды сигнала и определить соответствующее ему направление на объект. Устройства оценки азимута, основанные на этом принципе, характеризуются малой инструментальной точностью, обусловленной слабым изменением амплитуды сигнала в окрестности максимума ДНА, случайным расположением моментов появления импульсов принятого сигнала относительно диаграммы направленности, наличием шумов приемника (М.И.Финкельштейн. Основы радиолокации. -М.: Сов.радио, 1973, с. 338, 394, 404).
Значительно более высокую точность при той же ширине ДНА можно получить при использовании метода сравнения амплитуд, при котором производится сравнение амплитуд сигналов, принимаемых в двух положениях ДНА, максимумы которых симметрично сдвинуты относительно равносигнального направления (РСН) на угол смещения αсм (М.И.Финкельштейн, с. 390).
Устройства, реализующие метод сравнения, делятся на одноканальные и многоканальные. В одноканальных устройствах прием отраженного сигнала производится при разных положениях ДНА (М.И.Финкельштейн, рис. 8.33, с. 392, 393).
Коммутатор одновременно переключает выходы антенн и вход инерционного устройства сравнения, которое выделяет разностный сигнал. Недостатком одноканальных устройств является ошибка, обусловленная флюктуациями сигнала за время переключения ДНА. Этот недостаток устраняется в многоканальных устройствах, где прием отраженного сигнала производится для двух положений ДНА, соответственно двумя приемниками. Однако создание многоканальных систем сравнения является трудной задачей из-за сложности аппаратуры, высоких требований к идентичности каналов и стабильности их работы (В.Е.Дулевич, с. 49). При использовании методов сравнения априорно должно быть известно направление на цель, которое должно находиться в пределах угла смещения αсм. При этом способе необходимо так расположить антенную систему пеленгатора, чтобы равносигнальное направление совпадало с направлением на цель. "Нащупывание" равносигнальной зоны требует введения специальных устройств (С.В.Самсоненко. Цифровые методы оптимальной обработки р/л сигналов.- М.: Воениздат, МО СССР, 1968, с. 269).
В целом на весь процесс измерения затрачивается значительное время.
Измерение углов методом сравнения обычно применяется в режиме непрерывного сопровождения.
В качестве прототипа предполагаемого изобретения выберем устройство, определяющее азимут цели по фиксации азимутальных положений антенны, соответствующих моментам начала и конца пачки отраженных от цели сигналов (М.И.Финкельштейн, с. 402, рис. 8.5.1, с. 405, рис. 8.5.3). С выхода приемника отраженный от цели сигнал подается на устройство фиксации начала и конца пачки. Оно представляет собой последовательно соединенные генератор стандартных импульсов (или обнаружитель импульса цели), срабатывающий когда импульсы с выхода приемника превысят некоторый порог. Для исключения выдачи ложного начала и дробления пачки устройство определения начала и конца пачки основанно на логических критериях "n" из "m". Вычислитель азимута усредняет значения азимута в моменты времени, соответствующие началу и концу пачки.
Недостатком прототипа является относительно невысокая точность измерения азимута. Целью изобретения является создание устройства измерения азимута, обладающего точностью измерителей азимута, основанных на методе сравнения, а быстродействием и простотой реализации измерителей азимута, основанных на методе огибающей.
Для выполнения этой цели вводятся последовательно соединенные блок формирования выборок азимутальных и амплитудных последовательностей, блок определения угловых интервалов направления на цель, вычислитель элементарных угловых значений, блок усреднения.
Блок формирования выборок азимутальных и амплитудных последовательностей предназначен для создания условий применения метода сравнения. Он формирует из совокупности значений амплитуд, характеризующих огибающую сигнала на выходе приемника и соответствующих им значений азимута, выборки амплитуд и азимута.
Порядок построения выборок зависит от принятого вида излучения зондирующего сигнала.
1. При применении импульсного или квазинепрерывного излучения с фиксированной частотой повторения каждая выборка состоит из элементов (соответствующих значений амплитуд и азимутов), разнесенных по азимуту на величину смещения αсм.
В смежных выборках азимутальные элементы отстоят друг от друга на величину Δϕ•Δϕ - угол, на который перемещается антенна РЛС за интервал измерения амплитуды сигнала, при этом образуется K-выборок.
 целая часть
целая часть
Угол смещения αсм выбирается так, чтобы получить наилучшую точность измерения азимута. При аппроксимации ДНА гауссовой кривой оптимальный угол смещения равен
αсм= 0,8θ
при работе антенны на прием и передачу;
αсм= 1,2θ
при работе антенны только на прием,
где θ - ширина ДНА (В.Е.Дулевич, с. 445, 444).
2. При применении квазинепрерывного излучения с дискретным набором из "K" - частот повторения (П.И.Дудник, Ю.И.Чересов. Авиационные радиолокационные устройства. - М. : ВВИА, 1986, с. 242) каждая создаваемая последовательность состоит из элементов значений амплитуд и азимута, соответствующих конкретной частоте повторения. В этом случае также будет сформировано "K" выборок, где K - количество используемых частот повторения. Угловой размер использования дискретного набора частот повторения примерно равен ширине диаграммы направленности.
3. При применении квазинепрерывного излучения с высокой частотой повторения импульсов для измерения дальности используется метод линейно-частотной модуляции несущей импульсного сигнала (П.И.Дудник, с. 244). При этом последовательно в соседних подинтервалах времени используются зондирующие сигналы без крутизны изменения несущей S0 и с крутизной изменения несущей S1, возможно последовательное применение подинтервалов S0, S1, S2.
При применении подинтервалов S0, S1 число выборок K = 2, а при S0, S1, S2 - K = 3.
Угловой размер использования дискретного набора подинтервалов с S0, S1 или S0, S1, S2 выбирается равным ширине ДНА.
Блок определения угловых интервалов направления на цель предназначен для определения угловых позиций каждой из "K" выборок, между которыми расположена цель. Если выборка содержит два элемента амплитуды сигнала, превышающих порог, то цель расположена между угловыми позициями, соответствующими этим амплитудам. Если выборка содержит больше двух элементов амплитуды сигнала, превышающих порог, то из них выбирается два соседних наибольших.
При этом принимается, что цель расположена между угловыми координатами, соответствующими этим элементам. Если выборка нулевая (что возможно при использовании излучения с дискретным набором частот повторения) или содержит один элемент, то такие выборки в расчете угловых координат не используются.
Вычислитель элементарных угловых значений предназначен для вычисления азимута цели по двум выбранным для каждой из "K" выборок значениям угловых позиций и соответствующим им значениям амплитуды.
Без учета формы ДНА вычисление может быть произведено по формуле
где ϕj,ϕj+1 - границы интервала направления на цель,
Aj, Aj+1 - соответствующие значения амплитуды.
Найдем выражение для вычисления азимута при аппроксимации ДНА гауссовой кривой
где
b - параметр аппроксимации,
ϕц- направление на цель,
Ao - амплитуда при азимуте, равном азимуту цели.
Разделив (2) на (3), прологарифмировав полученное выражение, после несложных преобразований получим
где 1≤i≤K.
При вычислении ϕцi могут быть использованы и другие аппроксимации ДНА или эмпирические зависимости, полученные в процессе отработки.
Вычисление ϕцi аналогично определению азимута методом сравнения, только вместо коммутации положения антенны используются развертка ДНА в пространстве, запоминание и сравнение значений сигнала на выходе приемника в моменты времени, азимутальное положение которых отличается на угол смещения αсм,
Аналогично методу сравнения вычисленному значению присуща ошибка, обусловленная флюктуациями сигнала за время перемещения луча на угол αсм.
Эта ошибка будет уменьшена в блоке усреднения, где определяется вычисленное значение азимута по формуле
где pi(Ai) - "вес" элементарного измерения азимута, зависящего от максимальной амплитуды.
При неучете влияния амплитуды сигнала на точность оценки азимута
Проведенное математическое моделирование показало, что точность оценки азимута предлагаемая устройством, в два раза выше точности оценки азимута устройством, основанным на традиционном методе анализа огибающей. В настоящее время устройство проходит стендовую отработку.
Блок формирования выборок азимутальных и амплитудных последовательностей представляет собой коммутационное устройство, а точнее дешифратор, который группирует элементы входных последовательностей по сигналам устройства управления (Справочник по радиолокационным системам. Том 1. Под ред. Б.Х.Кривицкого. Энергия, 1979, рис. 5-36, 5-37, с. 335).
Блок может быть реализован микросхемой 1533Д7 "Дешифратор-демультиплексор", на два входа которого поступают последовательности текущих значений азимута и амплитуды сигнала, а на управляющий вход подаются управляющие импульсы.
Формирование сигналов управления можно осуществить различными путями.
В зависимости от построения РЛС группирование может осуществляться по различным признакам.
На фиг. 1 представлен пример реализации блока формирования азимутальных и амплитудных последовательностей при применении импульсного или квазинепрерывного излучения с фиксированной частотой повторения.
С "k" выходов задающего генератора последовательно с интервалом τ поступают сигналы на управляющие входы управляющих ключей УК1oCУК2К.
Время между появлением сигналов на соседних выходах может быть равно
где Δϕ - угол, на который перемещается антенна РЛС за интервал измерения амплитуды сигнала, угловая скорость движения антенны.
угловая скорость движения антенны.
Период появления управляющего сигнала на каждом управляющем входе УК1-УК2К равен Кτ. На выходах управляющих ключей образуются "k" пар выборок (амплитуд и соответствующих им значений азимута).
Значения азимута в каждой образованной выборке отстоят друг от друга на величину угла смещения αсм.
В смежных выборках азимутальные элементы отстоят друг от друга на величину Δϕ.
При последовательном изменении азимутального положения антенны на угол Δϕ на выходах задающего генератора (фиг. 1) могут появляться управляющие сигналы, поступающие на управляющие входы УК1-УК2К. Период появления сигналов на каждом из "k" выходов управляющего генератора равен αсм= KΔϕ.
При применении квазинепрерывного излучения с дискретным набором из "k" частот повторения в качестве сигналов, определяющих появление управляющих сигналов на выходе задающего генератора могут быть использованы значения периодов повторения импульсов.
При применении квазинепрерывного излучения с использованием различных значений крутизны изменения несущей в качестве сигналов, определяющих появление управляющих сигналов на выходе задающего генератора, могут быть использованы значения крутизны изменения несущей.
Здесь в качестве управляющих сигналов, определяющих появление управляющих сигналов на выходе задающего генератора, могут быть использованы значения крутизны изменения несущей.
Необходимо отметить и в последних двух примерах применения в качестве управляющих сигналов могут быть использованы значения Δϕ или τ.
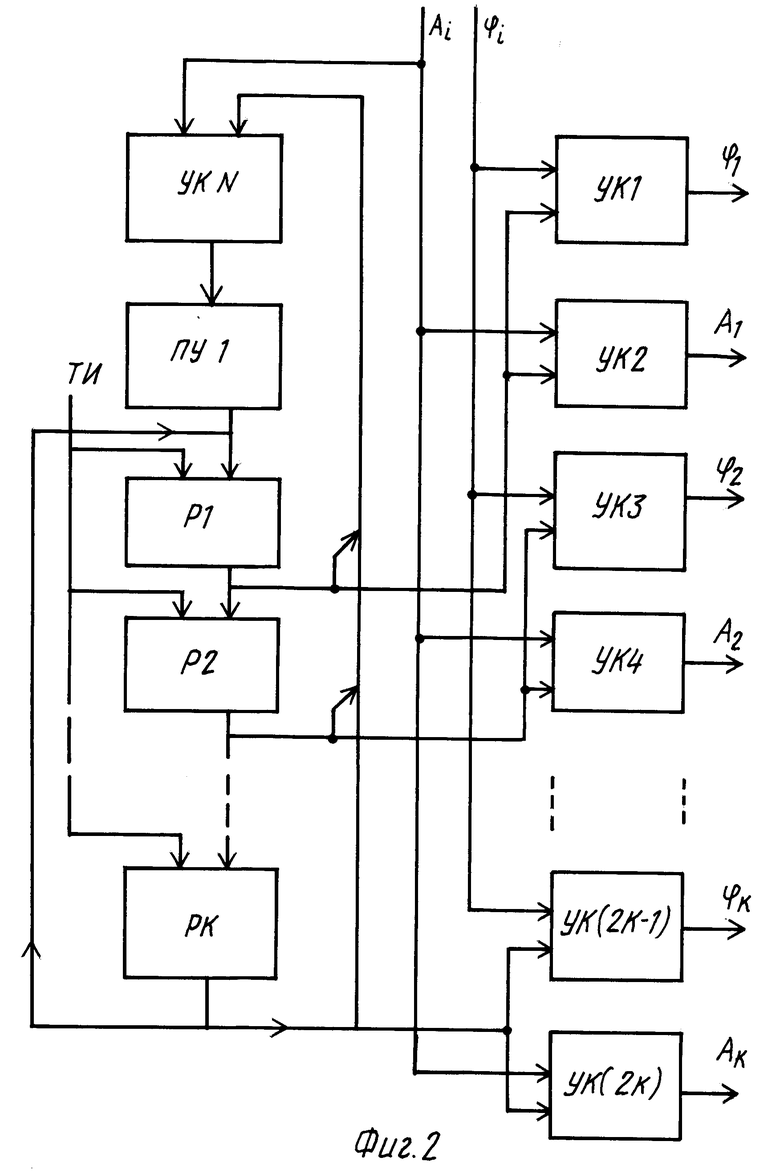
На фиг. 2 представлен пример реализации блока формирования выборок азимутальных и амплитудных последовательностей, где в качестве управляющих сигналов, воздействующих на управляющие входы УК используются тактовые импульсы БРЛС, соответствующие смене применяемых частот повторения или смене крутизны изменения несущей.
Блок состоит из управляющего ключа УКN, порогового устройства П1, "K" регистров со сдвигом P1...PK (А.Флорес. Организация вычислительных машин. -М.: Мир, 1972, с. 19, 21, рис. 1.33), 2K управляющих ключей. При отсутствии сигнала в начальный момент времени УКN открыт. При появлении сигнала, превышающего порог, срабатывает ПУ1, на выходе его появляется "1". Одновременно появление тактового импульса приводит к срабатыванию P1, на выходе его появляется сигнал "1", который закрывает УКN и открывает УК1, УК2. Через сигнальные входы УК1, УК2 текущий азимут и амплитуда сигнала появляется на выходе блока.
В следующий такт выходной импульс с амплитудой, равной 1, появится на выходе P2, закрывая УКN и открывая УК3, УК4. Сигналы A2, ϕ2 появятся на выходах УК3, УК4. Эта пара (A2, ϕ2) соответствует уже другой частоте повторения или другой крутизне изменения несущей. При срабатывании PK также закрывается УКN, открывается УК (2К-1), УК (2К) и сигналы Ai, ϕi проходят через сигнальные входы этих управляющих ключей.
Таким образом, входные последовательности A, ϕ разделяются на "К" пар выборок амплитуд и соответствующих значений азимута. Выход регистра РК соединен со входом Р1. При поступлении следующего тактового импульса срабатывает P1, открывая УК1, УК2. Процесс разделения входной последовательности A, ϕ на "К" последовательностей продолжится.
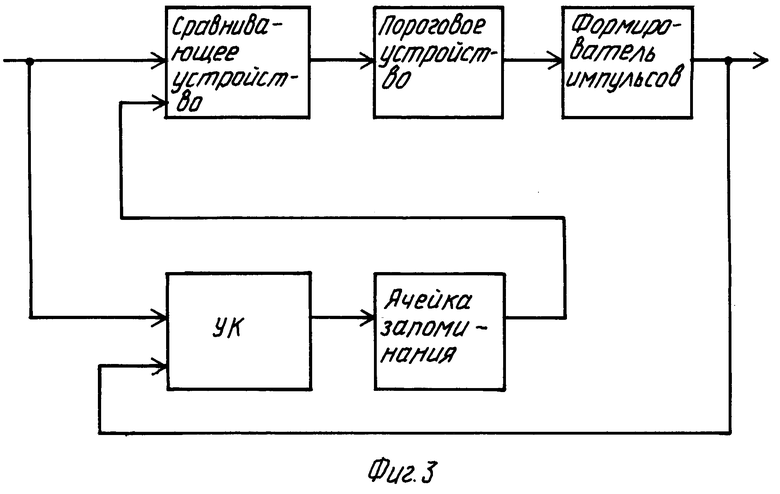
Устройство, представленное на фиг. 2, может быть применено и в тех случаях, когда в качестве управляющих сигналов используются значения Δϕ или τ, В этих случаях появление тактового импульса Ti будет происходить при изменении азимута на величину Δϕ или изменении текущего времени на величину τ, что иллюстрируется на фиг. 3.
Отсюда следует, что приращение азимута Δϕ и времени τ могут использоваться во всех случаях применения предлагаемого устройства для разделения входных последовательностей на выборки амплитуд и соответствующих им значений азимута.
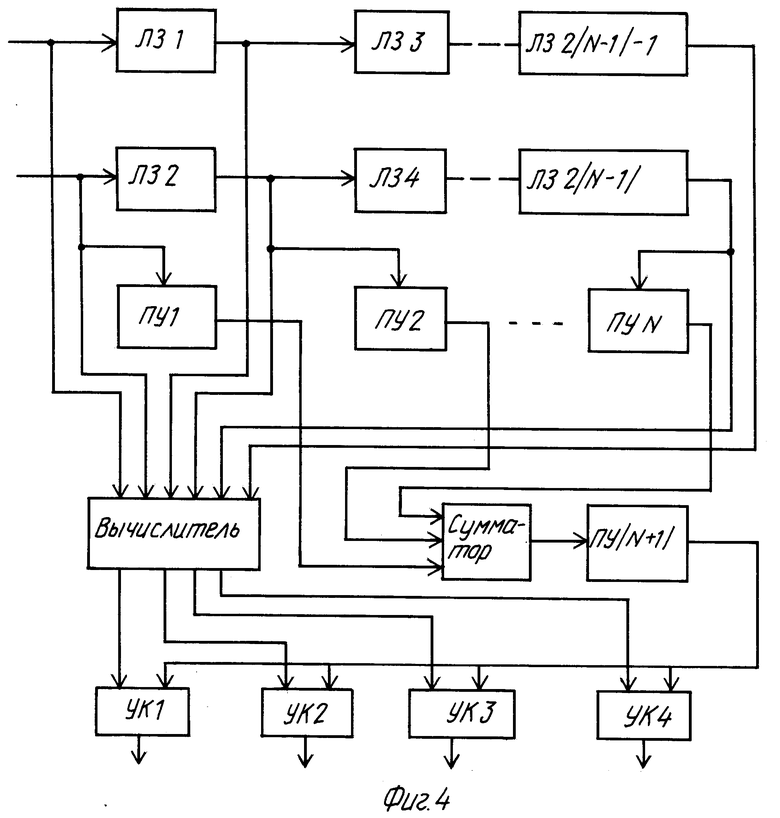
Блок определения угловых интервалов направления на цель. Назначение блока представлено выше. Блок состоит из "к" одинаковых частей, определяющих направление на цель для каждой пары выборок. На фиг. 4 и фиг. 5 приводится пример реализации одной части.
Она состоит из 2 (N-1) линий задержек (ЛЗ), (N+1) пороговых устройств ПУ, вычислителя для определения двух максимальных амплитуд, четырех управляющих ключей (УК). С помощью ЛЗ образуются последовательности значений амплитуд сигнала и соответствующих им азимутов. Число элементов последовательности N определяется количеством возможных значений амплитуд сигнала, отраженного от цели, отстоящих друг от друга на величину угла смещения αсм при проходе луча антенны через цель. В бортовых РЛС величина N≤4. Амплитуды сигнала и соответствующие им значения азимута поступают в вычислитель, где из совокупности амплитуд выбираются два значения, имеющие максимальные значения и соответствующие им значения азимута.
Пороговые устройства ПУ1-ПУN и сумматор предназначены для определения количества элементов последовательности значений амплитуд сигнала, превышающих нулевые значения. На выход ПУ1-ПУN вырабатывается сигнал "1" при значениях амплитуд, отличных от нуля.
При значениях сумматора 2 и больше срабатывает пороговое устройство ПУ (N+1). Выходной сигнал его поступает на управляющие входы управляющих ключей УК1-УК4, через сигнальные входы которых максимальные амплитуды Amax1, Amax2 и соответствующие им значения азимутов, определяющих угловой интервал направления на цель, поступают на выход блока.
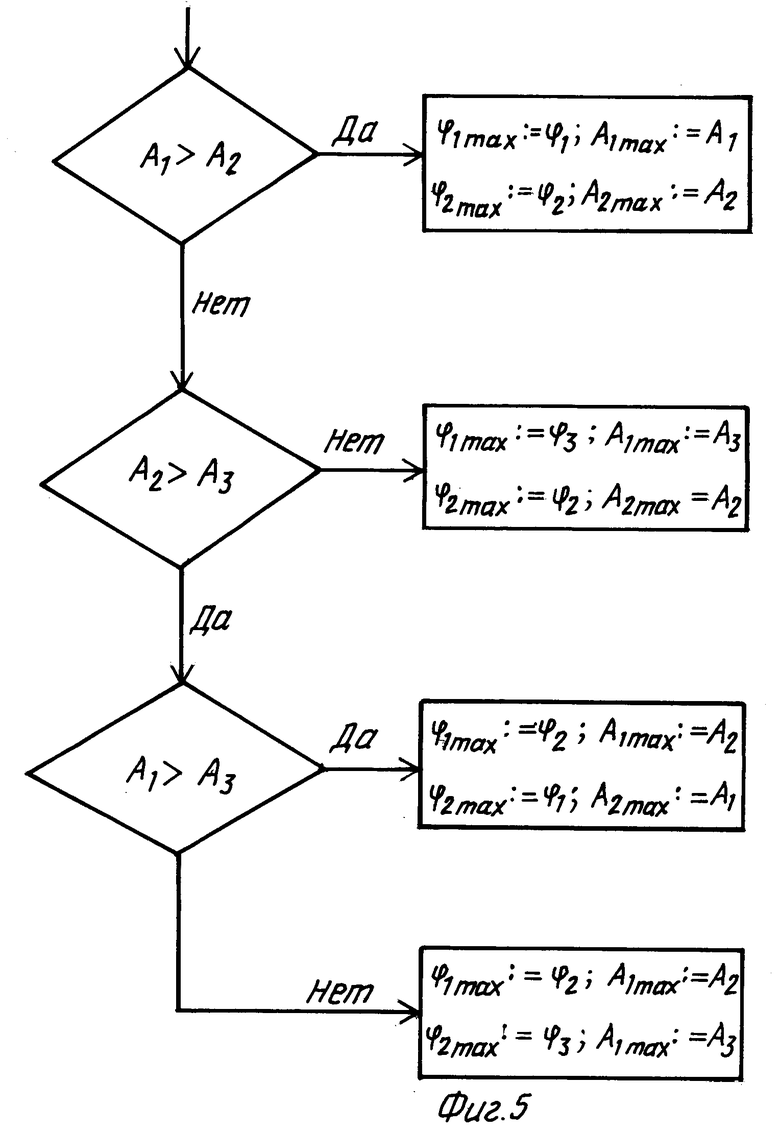
На фиг. 5 приведен алгоритм определения двух максимальных значений амплитуд на двух смежных азимутальных позициях, положенный в основу вычислителя, представленного на фиг. 4.
Алгоритм соответствует ситуации, когда в данной выборке за время существования пачки отраженных сигналов имеются три азимутальные позиции, на которых сигнал превышает порог. В алгоритме с использованием сравнивающих устройств определяются два смежных значения азимута, амплитуды которых максимальны.
Выбор наибольшего значения max (A1...AN) может быть реализован в вычислителе при программировании, например, на языке фортран, используя последовательно два раза специальное имя AmaxI (Д.Ж. Ашкрофт и др. Программирование на Фортране 77. -М.: Радио и связь, 1990, с. 246).
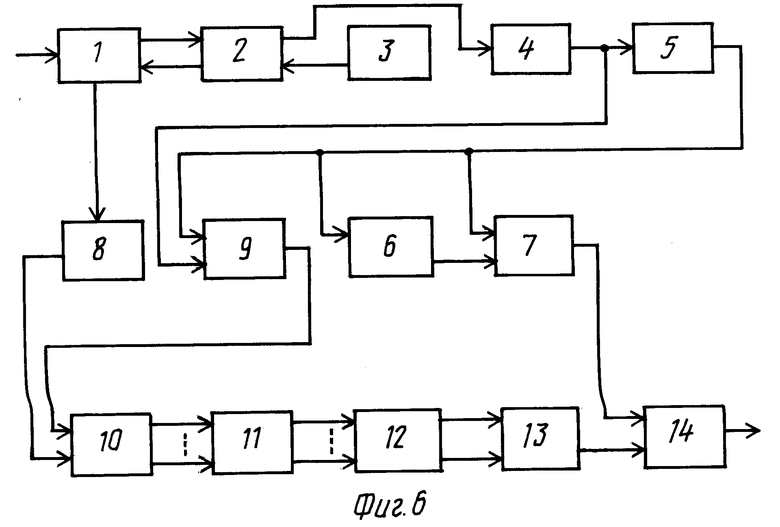
На фиг. 6 представлена блок-схема измерителя азимута выборкой амплитуд. Измеритель азимута выборкой амплитуд содержит антенну 1, антенный переключатель 2, передатчик 3, приемник 4, обнаружитель 5, блок определения начала пачки 6, блок определения конца пачки 7, датчик азимута 8, первый управляющий ключ 9, блок формирования выборок азимутальных и амплитудных последовательностей 10, блок определения угловых интервалов направления на цель 11, вычислитель элементарных угловых значений 12, блок усреднения 13, второй управляющий ключ 14, выход которого является выходом устройства.
При проходе луча антенны 1 через цель на выходе приемника 4 образуется последовательность дискретных сигналов, поступающих на вход обнаружителя 5, вырабатывающего стандартный импульс при превышении сигналом порога.
Импульсы с выхода Бл.5 поступают на входы блоков определения начала пачки 6 и конца пачки 7. Для уменьшения влияния импульсов помех и пропусков из-за флюктуаций отраженного сигнала блоки 6 и 7 реализуют критерии "n/m" (С. З.Кузьмин. Основы теории цифровой обработки радиолокационной информации. -М.: Сов.радио, 1974, с.178). В импульсных станциях в блоке реализуются критерии 3/4, 3/3, а в блоке 7 - "00" - два пропуска подряд. При применении импульсно-доплеровских РЛС, использующих для измерения дальности набор дискретных частот повторения применяют критерии 2/7, 3/8 (The Record of the IEEE 1990. International Radar Conference. Arlington Virginia 7-10 may 1990. Long term integration using a phased array Radar G.V. Frunk, J.D. Wilson and Hughes II c. 313-315).
В качестве критерия конца пачки может быть критерий "наличие серии из m пропусков подряд".
При применении импульсно-доплеровского излучения, использующего набор из, например, трех значений крутизны изменения несущей, в качестве критерия начала пачки может быть взят критерий 3/3, а в качестве критерия конца пачки - один пропуск или два пропуска подряд.
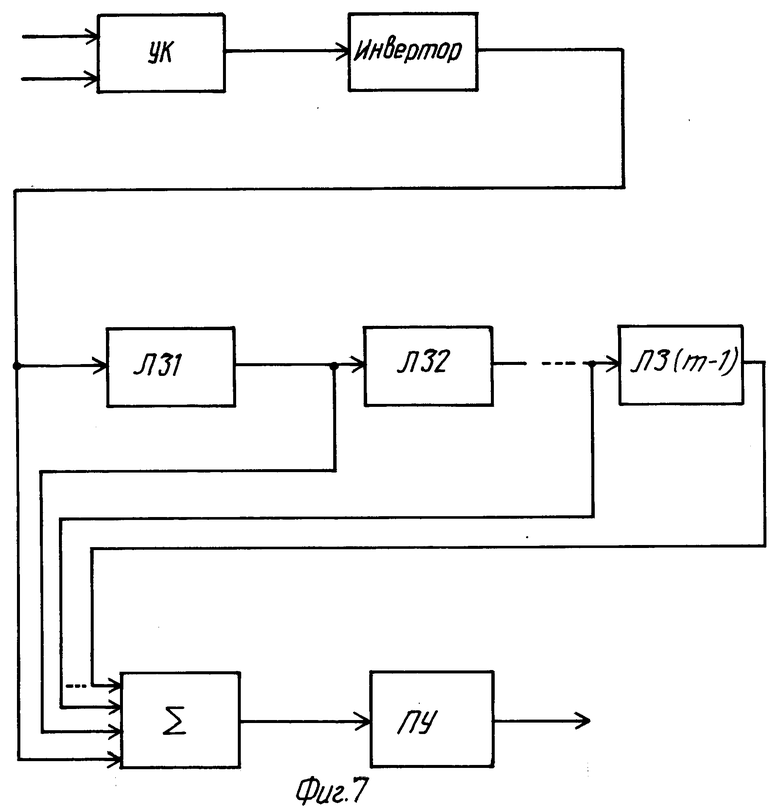
Блоки 6 и 7 устройства, реализующие критерии n/m. Выполнение блока 6, реализующего критерий n/m, представлено в кн. Кузьмин С.З., с. 160, рис. 5.4, Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. Воениздат, 1968, с. 102, рис. 4.19,4.20.
Блок 7 может состоять (см. рис. 7) из управляющего ключа, инвертора и устройства, реализующего критерий n/m аналогичного блоку 6. При срабатывании блока 6 его выходной сигнал открывает УК и сигналы с выхода обнаружителя через инвертор поступают на устройство, реализующее критерий n/m, состоящее из последовательно соединенных (m-1) Л3, сумматора и порогового устройства.
Сигналы с выхода приемника 4, превышающие порог обнаружителя 5, через сигнальный вход УК 9 поступают на первый вход блока 10, одновременно на второй вход блока 10 поступают значения азимута с датчика 8. Для получения достоверных оценок на вход блока 10 поступают сигналы с выхода приемника 4, только превышающие пороговый уровень обнаружителя 5. Для этого выход блока 5 соединен с управляющим входом УК9.
В блоке 10 последовательности амплитуд сигналов с выхода приемника 4 и соответствующие им значения азимута разделяются на "К" пар выборок. Значения азимута в каждой образованной выборке отстоят друг от друга на величину угла смещения αсм. В смежных выборках элементы отстоят друг от друга на величину Δϕ. "К" пар выходов блока 10 соединены с "К" парами входов блока 11, где для каждой выборки определяется азимутальный интервал, на котором расположено угловое положение цели. Естественно, это будет тот интервал, на границах которого значения амплитуд отраженного от цели сигнала максимальны. Значения границ интервала и соответствующие им значения амплитуд сигнала являются выходными параметрами блока 11 для каждой выборки.
Так как в процессе измерения азимута может быть "К" выборок, то блок 11 имеет 4 "К" выходов, которые соединены соответствующими входами блока 12.
В блоке 12 для каждой выборки вычисляется азимут цели по формулам (1) или (4). Могут быть использованы и другие формульные зависимости, учитывающие конкретный вид ДНА или эмпирические зависимости, полученные в процессе отработки. Например, при вычислении ϕцi можно для упрощения не использовать значения амплитуд.
В этом случае количество выходов блока 11 и входов блока 12 уменьшится в два раза.
В связи с тем что в процессе измерения азимута может быть "К" выборок, то в блоке 12 может быть вычислено до "К" значений ϕцi. Эти "К" значений ϕцi и соответствующие им максимальные значения амплитуды сигнала поступают на выход блока 12, "2К" выходов блока 12 соединены с 2К входами блока 13.
В блоке усреднения 13 вычисляется среднее значение азимута по формуле (5). Если значение амплитуды не учитывать, то выражение (5) примет вид
где K - количество вычисленных значений.
После прохождения луча антенны через цель на выходе блока 7 появляется сигнал, поступающий на управляющий вход УК2 (бл.14), через сигнальный выход которого вычисленное значение азимута цели поступает на выход устройства.
На фиг. 3 представлен пример устройства, вырабатывающего управляющий (тактовый) импульс при изменении азимута на угол Δϕ или изменении текущего времени на величину τ.
Устройство состоит из последовательно соединенных сравнивающего и порогового устройств, формирователя импульсов, управляющего ключа (УК), ячейки запоминания. На первый вход сравнивающего устройства поступает текущее значение азимута (времени), а на второй вход - запомненное значение. При достижении разности величины Δϕ(τ) срабатывает пороговое устройство. Оно запускает формирователь импульсов, вырабатывающий управляющий (тактовый) импульс. Управляющий импульс также открывает УК и текущее значение азимута (времени) поступает в ячейку запоминания.
Процесс циклически повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| МОДАЛЬНЫЙ ДАЛЬНОМЕР ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2277714C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
Устройство измерения азимута выборкой амплитуд предназначено для измерения азимута в обзорных РЛС со сканирующей антенной. При прохождении луча антенны через цель на выходе приемника образуется пачка отраженных импульсов, амплитуда которых повторяет диаграмму направленности антенны (ДНА). Из последовательности амплитуд отраженных импульсов и соответствующих им значений азимута формируются выборки. В каждой выборке значения азимута различаются на угол смещения, равный примерно ширине ДНА. В смежных выборках азимутальные элементы отстоят друг от друга на угол перемещения антенны за интервал измерения амплитуды сигнала. В каждой выборке определяется азимутальный интервал направления на цель, на границах этого интервала амплитуды максимальны. По значениям азимута на границах этих интервалов и соответствующим им значениям амплитуд сигнала определяется азимут цели, что является достигаемым техническим результатом. 7 ил.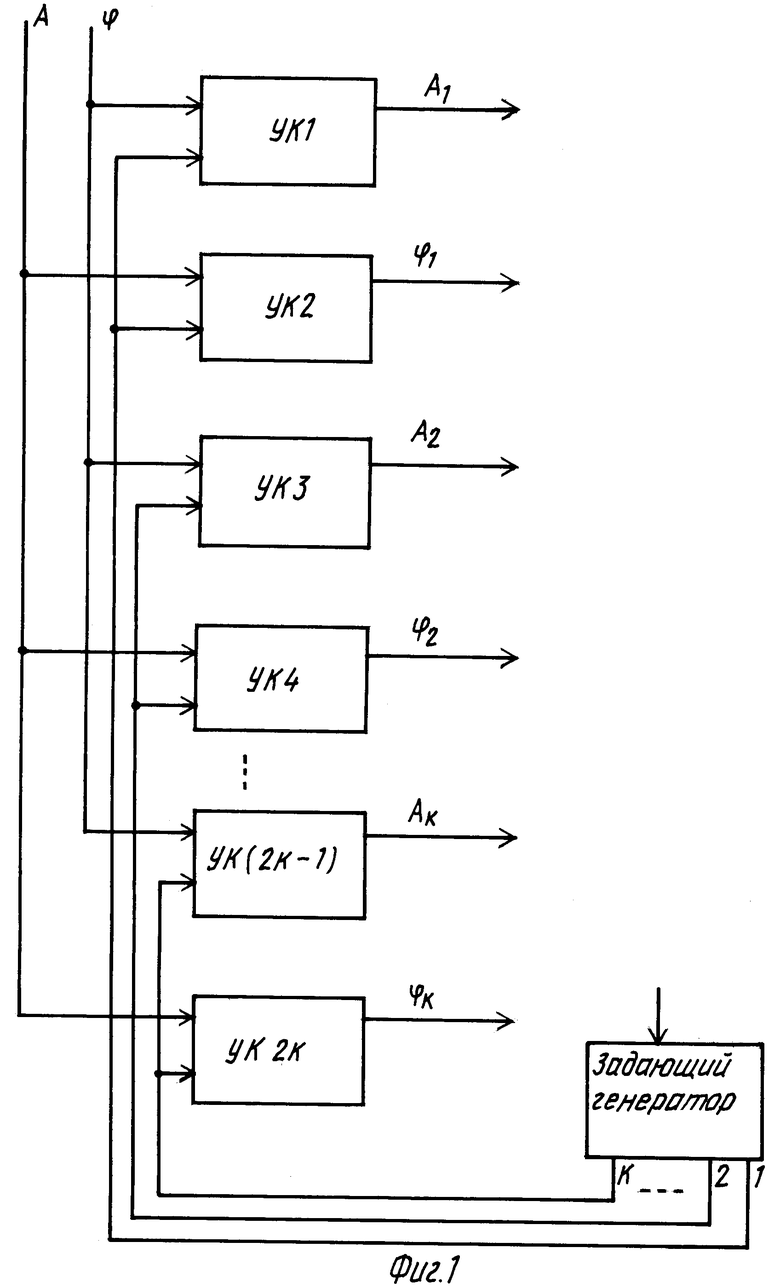
Измеритель азимута выборкой амплитуд, содержащий антенну, соединенную с датчиком азимута и через антенный переключатель с передатчиком и приемником, последовательно соединенные обнаружитель, блоки определения начала и конца пачки, выход приемника соединен с входом обнаружителя, выход которого также соединен с вторым входом блока определения конца пачки, отличающийся тем, что вводятся два управляющих ключа, блоки формирования выборок азимутальных и амплитудных последовательностей, определения угловых интервалов направления на цель, усреднения, вычислитель элементарных угловых значений, управляющий вход первого управляющего ключа соединен с выходом обнаружителя, а его сигнальный вход - с выходом приемника, выход датчика азимута соединен с первым входом, а выход первого управляющего ключа - с вторым входом блока формирования азимутальных и амплитудных последовательностей, выходы которого соединены с входами блока определения угловых интервалов направления на цепь, выходы которого соединены с входами вычислителя элементарных угловых значений, выходы вычислителя соединены с входами блока усреднения, выход которого соединен с сигнальным входом второго управляющего ключа, управляющий вход которого соединен с выходом блока определения конца пачки.
| Финкельштейн М.И | |||
| Основы радиолокации | |||
| - М.: Советское радио, 1973, с.402, рис.8.5.1, с.405, рис.8.5.3 | |||
| Самсоненко С.В | |||
| Цифровые методы оптимальной обработки радиолокационных сигналов | |||
| - М.: Воениздат, МО СССР, 1968, с.269 | |||
| SU 4903030 A, 20.02.90 | |||
| US 4929952 A, 29.05.90 | |||
| US 4670753 A, 02.06.87 | |||
| Анализатор формы видеоимпульсов | 1977 |
|
SU736016A1 |

