Изобретение относится к гидроакустике и может быть использовано при разработке гидроакустических дальномерных систем повышенной точности, предназначенных для работы в водоемах ограниченных размеров с большим дисперсионным искажением акустических сигналов.
Известен гидроакустический дальномер, в котором измеряемое расстояние r и время распространения t акустического сигнала в среде между излучателем и приемником связаны соотношением:
r c ˙ t, (1) где с скорость звука в среде, имеющая смысл групповой скорости, усредненной по трассе распространения, если среда является неоднородной.
В водоеме типа волновода точки излучения и приема связаны целым набором лучевых траекторий, а время распространения изменяется от некоторого минимального, соответствующего максимальной групповой скорости Cmax в волноводе, до некоторого максимального, соответствующего минимальной групповой скорости Cmin, называемой обычно скоростью волны Эйри. Физически это означает уширение акустического сигнала, вследствие дисперсии на величину δt t ˙ δ c/c, где δc Cmax Cmin, C некоторая средняя скорость, при этом погрешность акустического дальномера, работающего по алгоритму (1), становится недоступно большой:
δr c·δt r·δc/c 
 (20-30)%
(20-30)%
Известен способ измерения расстояния, использующий понятие инвариантной скорости Синв, которая функционально выражается через Сф и групповую Сг скорости распространения акустического сигнала в водоеме типа волновода и для различных лучевых траекторий сохраняет постоянное значение. Для однородных водоемов и неоднородных водоемов малой глубины инвариантная скорость определяется соотношением
Синв2 Сф ˙ Сг.
Суть соответствующего способа заключается в одновременном измерении фазовой скорости Сф и группового времени запаздывания tг акустического сигнала.
Данный способ измерения расстояния реализуется устройством, в котором на контролирующем объекте размещены передатчик электромагнитных волн, генераторы высокой ω и низкой Ω частоты, умножитель, усилитель мощности, излучатель амплитудно-модулированного акустического сигнала, и на контролируемом объекте размещены приемник электромагнитных волн, два акустических приемника, разнесенных в пространстве на расстояние l, много меньшее длины волны на частоте ω, два фазометра, блок задания инвариантной скорости и вычислитель.
С помощью первого фазометра измеряется разность фаз Δ ϕ(Ω) низкочастотного акустического сигнала за время прохождения им контролируемого расстояния, причем за опорный принимается синхронно излученный с ним в эфир электромагнитный сигнал частоты ω, промодулированный частотой Ω.
С помощью второго фазометра измеряется разность фаз Δ ϕ(ω) между высокочастотными составляющими акустического сигнала, принятого двумя акустическими приемниками, разнесенными на расстояние l в направлении распространения волны.
Контролируемое расстояние вычисляется по формуле
r  ·
·  · C
· C tф;
tф;  tг имеют смысл фазового tф и группового tг времени запаздывания, а погрешность определения расстояния по алгоритму (2) определяется инструментальными погрешностями фазометров, погрешностью задания инвариантной скорости и слабо зависит от дисперсионных искажений сигнала.
tг имеют смысл фазового tф и группового tг времени запаздывания, а погрешность определения расстояния по алгоритму (2) определяется инструментальными погрешностями фазометров, погрешностью задания инвариантной скорости и слабо зависит от дисперсионных искажений сигнала.
По своей технической сущности, совокупности существенных признаков и достигаемому техническому результату данный способ измерения расстояния и реализующее его устройство являются наиболее близкими к изобретению.
Основным недостатком данного способа и реализующего его устройства является использование бигармонического (непрерывного) сигнала и большая погрешность фазовых измерений в водоемах с ограниченными размерами, связанная с наличием отраженных сигналов, искажающих фазовую структуру звукового поля.
В основу изобретения положена задача разработать такой способ измерения расстояния и устройство для его осуществления, чтобы уменьшить погрешность измерения расстояния в водоемах ограниченных размеров при наличии отраженных сигналов и сильных дисперсионных искажений.
Поставленная задача решается тем, что в способе измерения расстояния до контролируемого объекта, при котором на контролирующем объекте генерируют и излучают акустический сигнал, принимают сигнал на контролируемом объекте в двух точках приема, разнесенных на расстояние l, меньшее длины волны излучаемого сигнала, предварительно определяют инвариантную скорость Синв2, на основе измерений параметров принятых сигналов определяют фазовое tф и групповое tг время запаздывания и вычисляют искомое расстояние r по соотношению
r  · C
· C
tг=  tф=
tф=  где K12(τ)
где K12(τ)  P1(t)P2(τ-t)dt
P1(t)P2(τ-t)dt
P1(t), P2(t) сигналы, принятые в двух точках приема;
Т1, Т2 предварительно орпеделенные временные интервалы; причем Т2 < Т1 < Т, где Т период излучаемого импульсного сигнала.
Поставленная задача решается также тем, что в устройство для измерения расстояния до контрольного объекта, содержащее на контролирующем объекте генератор сигналов, выход которого соединен с первым входом перемножителя, усилитель мощности, вход которого соединен с выходом перемножителя, а выход с акустическим излучателем, на контролируемом объекте последовательно соединенные первый акустический приемник, первый усилитель и первый фильтр, последовательно соединенные второй акустический приемник, второй усилитель и второй фильтр, блок задания инвариантной скорости, вычислитель, первый вход которого соединен с выходом блока задания инвариантной скорости, а выход с входом индикатора, причем первый и второй акустические приемники разнесены на заданное расстояние в направлении распространения волны, в соответствии с изобретением введены на контролирующем объекте первый синхронизатор и модулятор, вход которого соединен с выходом первого синхронизатора, а выход с вторым входом перемножителя, на контролируемом объекте синхронизированный с первым синхронизатором второй синхронизатор, выход которого соединен с вторым входом вычислителя, и блок задания временных интервалов, выход которого соединен с третьим входом вычислителя, при этом четвертый и пятый входы вычислителя соединены с выходами первого и второго фильтров.
Использование импульсного режима работы и селективного приема полезных сигналов с помощью временных интервалов Т1 < Т, Т2 < Т1 позволяют исключить влияние отраженных сигналов на процедуру вычисления tф, tг и тем самым уменьшить погрешность вычисления расстояния.
Временной интервал Т1 выбирается таким, чтобы при определении группового времени учитывалась вся эффективная длительность принятого акустического сигнала Т2, искаженного дисперсией, однако, импульсы, отраженные от границ водоема, не попадают в этот интервал. Аналогично, длительность временного интервала (-Т2, Т2) выбирается такой, чтобы при определении фазового времени запаздывания сигнала Р2(t) относительно сигнала Р1(t) учитывался весь эффективный интервал функции корреляции К12(τ) этих сигналов, но в этот интервал не попадают дополнительные максимумы этой функции, связанные с отраженными сигналами.
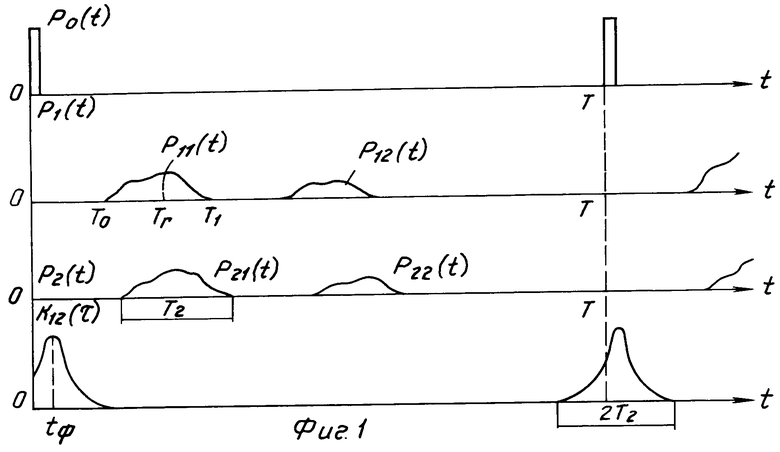
На фиг.1 изображены диаграммы огибающих рабочих сигналов, поясняющие реализацию способа измерения расстояния, где
Po(t) излученный акустический сигнал длительностью τo;
P1(t) акустический сигнал, принятый первым гидрофоном, состоящий из прямого сигнала P11(t), искаженного дисперсией, и отраженного от границы водоема сигнала Р12(t);
P2(t) акустический сигнал, принятый вторым гидрофоном, состоящий из прямого сигнала P21(t), искаженного дисперсией, и отраженного от границ водоема сигнала P22(t);
Т2 эффективная длительность сигналов P11(t); P21(t);
То начальный момент прихода сигнала P1(t).
На фиг.2 изображена блок-схема устройства для измерения расстояния.
Для осуществления предлагаемого способа (см. фиг.1) необходима реализация алгоритмов (3), (4), для чего предварительно устанавливают значения временных интервалов Т1 То(1 + ΔC/C), Т2 То ΔC/C, где С средняя скорость, причем величина ΔТТ2 τо характеризует дисперсионное уширение акустического сигнала, а величина Δ с определяется дисперсионными характеристиками водоема и, например, для однородного по глубине водоема определяется выражением ΔС Сгр С, где Сгр скорость звука в грунте.
При поступлении рабочего сигнала P1(t) определяют групповое время запаздывания tг как средневзвешенное по всей временной реализации сигнала P1(t) с учетом его дисперсионного уширения на величину ΔТ, причем весовой функцией при таком усреднении является мгновенная мощность сигнала P21(t). Сигналы, отраженные от границ водоема, не попадают в интервал усреднения Т1.
При поступлении двух задержанных друг относительно друга сигналов P1(t), P2(t) определяют функцию их взаимной корреляции К12(τ), эффективная длительность которой не более 2Т2, а положение максимума на временной оси соответствует фазовому времени запаздывания сигналов друг относительно друга.
Алгоритм вычисления tф аналогичен алгоритму вычисления tг, но роль весовой функции играет мгновенное значение квадрата функции корреляции. Дополнительные максимумы корреляционной функции, связанные с наличием сигналов, отраженных от границ водоема, не попадают в интервал усреднения (-Т2, Т2) при вычислении tф.
Для реализации алгоритма (4) вычисления расстояния используют групповое tг и фазовое tф времена запаздывания, определенные алгоритмом (3), и заранее определенное значение инвариантной скорости Синв2.
Устройство для измерения расстояния (фиг.2) включает контролирующий объект 1, содержащий синхронизатор 2, генератор 3 сигналов, перемножитель 4, модулятор 5, усилитель 6 мощности, акустический излучатель 7 и контролируемый объект 8, содержащий второй синхронизатор 9, первый акустический приемник 10, усилитель 11 и первый фильтр 12, второй акустический приемник 13, усилитель 14 и второй фильтр 15, блок 16 задания инвариантной скорости, блок 17 задания временных интервалов Т1, Т2, вычислитель 18 и индикатор 19.
Устройство для измерения расстояния работает следующим образом.
Сигнал частоты ω, вырабатываемый генератором 3 сигналов, и сигнал модулятора 5, который запускается синхронизатором 2, подаются на перемножитель 4, вход которого соединен с входом усилителя 6 мощности. Усиленный радиоимпульс подается на акустический излучатель 7, излучающий сигнал в водную среду.
Акустические сигналы, принятые акустическими приемниками 10, 13, разнесенными в пространстве на расстояние l в направлении распространения волны после усиления усилителями 11, 14 и фильтрации фильтрами 12, 15, поступают на соответствующие входы вычислителя 18, работой которого управляет второй синхронизатор 9, работающий синхронно с первым синхронизатором 2. В вычислитель 18 также поступает информация из блока 16 задания инвариантной скорости и блока 17 задания временных интервалов. С выхода вычислителя 18 информация поступает на индикатор 19. Вычислитель 18 работает в масштабе единого времени с первым синхронизатором 2, вычисляя групповое tг и фазовое время tф по алгоритмам (3) и искомое расстояние по формуле (4).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039368C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2125278C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311663C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2313802C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311662C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2313803C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452979C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452977C1 |
Использование: гидроакустика, в частности в гидроакустических дальномерных системах повышенной точности. Сущность изобретения: для уменьшения погрешности измерения расстояния в водоемах ограниченных размеров при наличии переотражений и дисперсионных искажений принимают излученный акустический сигнал в двух разнесенных точках, определяют инвариантную скорость, на основе измеренных параметров принятых сигналов определяют фазовое и групповое время запаздывания и вычисляют расстояние согласно алгоритму, выведенному для периодического импульсного излучаемого сигнала, синхронизированного с отсчетом времени в точках приема. Устройство для измерения расстояния содержит на контролирующем объекте 1 первый синхронизатор 2, генератор 3 сигналов, перемножитель 4, модулятор 5, усилитель 6 мощности и акустический излучатель 7, а также на контролируемом объекте 8 разнесенные акустические приемники 10, 13, усилители 11, 14, фильтры 12, 15, соединенные с входами вычислителя 18, управляемого вторым синхронизатором 9, работающим синхронно с первым синхронизатором 2. С входами вычислителя соединены блоки 16 задания инвариантной скорости и блок 17 задания временных интервалов, а с его выходом - индикатор 19. 2 с.п. ф-лы, 2 ил.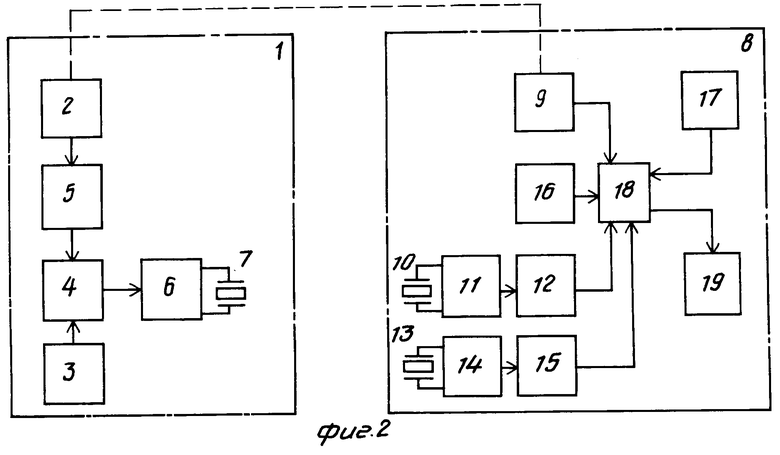
 отличающийся тем, что в качестве излучаемого сигнала используют периодический импульсный сигнал, излучение которого синхронизируют с началом отсчета времени в точках приема на контролируемом объекте, при этом фазовое и групповое время запаздывания определяют соответственно по формулам
отличающийся тем, что в качестве излучаемого сигнала используют периодический импульсный сигнал, излучение которого синхронизируют с началом отсчета времени в точках приема на контролируемом объекте, при этом фазовое и групповое время запаздывания определяют соответственно по формулам
P1(t), P2(t) сигналы, принятые в двух точках приема;
T1, T2 предварительно определенные временные интервалы,
причем T2 < T1 < T, где T период излучаемого импульсного сигнала.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1327685, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
