Изобретение относится к области разработки гидроакустических дальномерных средств и может быть использовано для определения местоположения подводных объектов, донных маяков ответчиков, подводных аппаратов,когда требуется повышенная точность дальномерной привязки.
Известен способ измерения расстояния и устройство для его осуществления в которых используется алгоритм пересчета измеренного времени распространения акустического сигнала t в дистанцию r через известную скорость звука (r t•c). Устройство для его осуществления реализует хорошо известные принципы построения радиолокаторов или гидролокаторов, определяющих дистанцию до объекта по времени задержки отраженного сигнала [1]
Недостатком способа и реализующего устройства является большая погрешность дальнометрии в случае многолучевого распространения акустического сигнала в неоднородной по скорости звука среде при наличии отражающих границ.
Известен способ измерения расстояния и устройство для его осуществления, в котором погрешность акустического дальномера уменьшено благодаря новому алгоритму определения расстояния, использующему инвариантную скорость. В этом способе на контролирующем объекте генерируют и излучают периодический импульсный сигнал, излучения которого синхронизируют с началом отсчета времени в месте приема на контролируемом объекте, принимают акустический сигнал в двух точках на контролируемом объекте, разнесенных на расстояние l, в направлении распространения акустического сигнала, предварительно определяют инвариантную скорость Cинв и интервалы времени T1, T2, определяют на основе измерения параметров принятых сигналов фазовое tф и групповое tг время запаздывания и вычисляют искомое расстояние по формуле r = tф•tг•c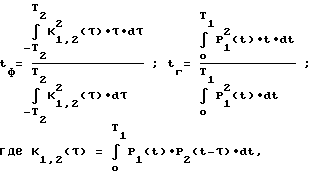
p1(t), p2(t) сигналы, принятые в двух точках приема;
T1, T2 предварительно определенные временные интервалы, причем T2<T1<T, T период следования излучаемого импульсного сигнала,
τ - переменное время задержки в пределах временного интервала -T2, T2.
Устройство для измерения расстояния до контролируемого объекта содержит на контролирующем объекте генератор сигналов, перемножитель, первый вход которого соединен с выходом генератора сигналов, модулятор и первый синхронизатор, первый выход которого соединен с входом модулятора, а выход модулятора соединен с вторым входом перемножителя, усилитель мощности, вход которого соединен с выходом перемножителя, а выход с акустическим излучателем, на контролируемом объекте последовательно соединенные первый акустический приемник, усилитель и фильтр, последовательно соединенные вторые акустический приемник, усилитель и фильтр, блок задания инвариантной скорости, вычислитель, первый вход которого соединен с выходом блока задания инвариантной скорости, а выход с входом индикатора, второй синхронизатор, синхронизированный с первым, выход которого соединен со вторым входом вычислителя, блок задания временных интервалов, выход которого соединен с третьим входом вычислителя, при этом первый и второй акустические приемники разнесены на заданное расстояние в направлении распространения волны, а выходы первого и второго фильтров соединены соответственно с четвертым и пятым входами вычислителя.
По своей технической сущности, составу существенных признаков и достигаемому техническому результату данный способ измерения расстояния и реализующее его устройство являются наиболее близкими к заявляемому способу и устройству.
Недостатком такого способа и устройства его реализующего является невозможность ориентирования двух приемников, разнесенных на заданное расстояние, в направлении распространения акустической волны при работе в море, когда положение излучателя акустического сигнала непрерывно меняется, т.е. меняется взаимное расположение контролируемого и контролирующего объектов.
В основу изобретения положена задача разработать такой способ измерения расстояния и устройство для его осуществления, которые можно реализовать при работе в море при непрерывно меняющемся взаимном положении контролируемого и контролирующего объектов с минимальной погрешностью, связанной с многолучевостью распространения акустических сигналов при наличии отражающих границ и дифракционных искажений сигнала.
Поставленная задача решается тем, что в способе определения расстояния до контролируемого объекта, при котором на контролирующей объекте генерируют и излучают периодический импульсный сигнал, излучение которого синхронизируют с началом отсчета времени в месте приема, принимают акустический сигнал в точках приема, разнесенных в направлении распространения акустического сигнала, предварительно определяют инвариантную скорость Cинв и интервалы времени T2, T1, определяют на основе измерения параметров принятых сигналов фазовое tф и групповое tг время запаздывания и вычисляют расстояние по соотношению r=tф• tг•C
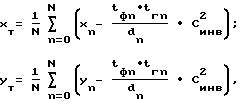
где dn расстояние между n и (n+1) измерениями координат на галсах, и определяют расстояние от траверзных точек с координатами xт, yт до контролируемого объекта по формулам
при этом групповое и фазовое время определяются по формулам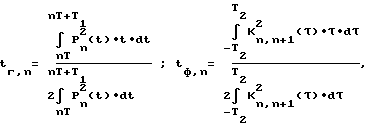
где  , T период следования импульсного сигнала, pn(t) последовательно принимаемые на контролирующем объекте сигналы.
, T период следования импульсного сигнала, pn(t) последовательно принимаемые на контролирующем объекте сигналы.
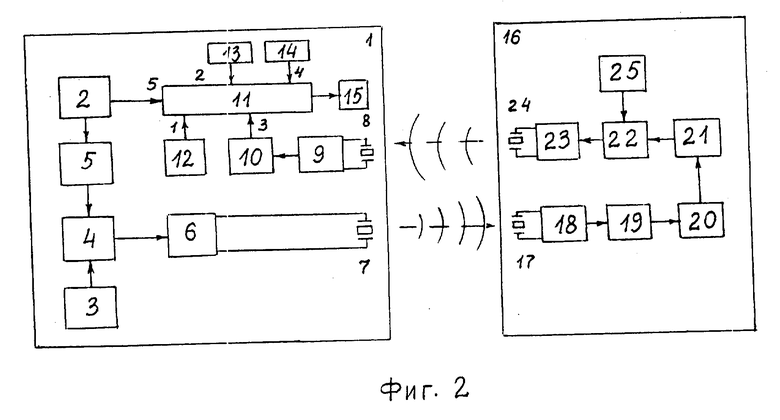
Поставленная задача решается также тем, что в устройство для измерения расстояния до контролируемого объекта, содержащее на контролирующем объекте генератор сигналов, перемножитель, первый вход которого соединен с выходом генератора сигналов, модулятор и синхронизатор, первый выход которого соединен с входом модулятора, а выход модулятора с вторым входом перемножителя, усилитель мощности, вход которого соединен с выходом перемножителя, а выход
с акустическим излучателем, на контролируемом объеме последовательно соединенные первый акустический приемник, усилитель и фильтр, введены на контролируемом объекте пороговое устройство, вход которого соединен с выходом первого фильтра, второй модулятор, вход которого соединен с выходом порогового устройства, второй генератор сигналов и второй перемножитель, первый вход которого соединен с выходом второго генератора, а второй вход с выходом второго модулятора, второй усилитель мощности, вход которого соединен с выходом второго перемножителя, второй акустический излучатель, соединенный с выходом второго усилителя мощности.
Блок задания инвариантной скорости, блок задания временных интервалов, выходы которых соединены с первым и вторым входами вычислителя, индикатор, вход которого соединен с выходом вычислителя, последовательно соединенные вторые акустический приемник, усилитель и фильтр, выход которого соединен с третьим входом вычислителя, размещенного ранее на контролируемом объекте, перенесены с сохранением перечисленных функциональных связей на контролирующий объект. Кроме того, на контролирующем объекте введена дополнительно спутниковая навигационная система типа GPS, выход которой соединен с четвертым входом вычислителя, а второй выход синхронизатора соединен с пятым входом вычислителя.
На фиг. 1 изображены диаграммы огибающих рабочих сигналов; на фиг. 2 - блок-схема устройства для измерения расстояния; на фиг. 3 локальная система координат (x, y).
На диаграммах огибающих рабочих сигналов в момент времени P0,n(t), P0,n+1(t) последовательно излучаемые на контролирующем объекте в моменты времени t nT, t(n+1)T соответственно акустические сигналы, P1,n(t), P2,n(t) ретранслированные контролируемым объектом сигналы прямой P1,n(t) и отраженный границами P2,n(t) на входе второго акустического приемника, соответствующие излученному сигналу Pоn(t);
P1,n+1(t), P2,n+1(t) ретранслированные контролируемым объектом сигналы, соответствующие излученному сигналу P0,n+1(t), P1,n+1(t-T), P2,n+1(t-T) сдвинутые на период следования T принятые сигналы.
Устройство для измерения расстояния содержит контролирующий объект 1, синхронизатор, 2, генератор сигналов 3, перемножитель 4, модулятор 5, усилитель мощности 6, первый акустический излучатель 7, второй акустический приемник 8, второй усилитель 9, второй фильтр 10, вычислитель 11, блок задания инвариантной скорости 12, блок задания временных интервалов 13, спутниковая навигационная система типа GPS, индикатор 15, контролируемый объект 16, первый акустический приемник 17, первый усилитель 18, первый фильтр 19, пороговое устройство 20, второй модулятор 21, второй перемножитель 22, второй усилитель мощности 23, второй акустический излучатель 24, второй генератор сигналов 24.
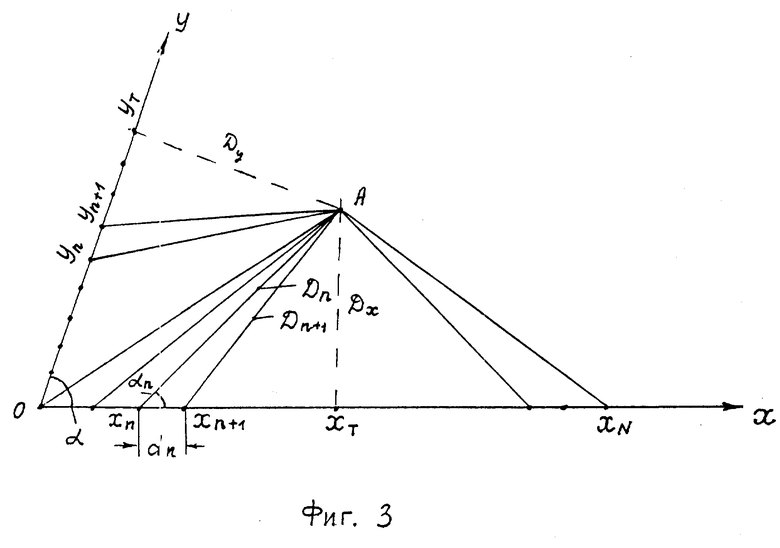
Локальная система координат (x, y), образованная при движении контролирующего объекта с GPS относительно контролируемого объекта А с точками траверзы xт, yт.
Спутниковая навигационная система типа GPS выполнена стандартной (В.А. Коугия, А.И.Сорокин. Геодезические сети на море. М. Недра, 1979. 271 с. Navigation, 1995, v. 42, N 1, p. 109-164).
Контролирующий объект, размещенный на судне-носителе, снабженном GPS, двигается равномерно и прямолинейно относительно контролируемого объекта А, например, донного маяка ответчика, координаты которого нужно определить. Первый акустический излучатель, размещенный на контролирующем объекте, излучает акустические сигналы Pоn(t) с периодом T, определяя синхронно с излучением свое местоположение с помощью GPS на каждом из двух прямолинейных галсов, пересекающихся под углом α ≈ 90o. Сигналы излучателя принимаются на контролируемом объекте, ретранслируются обратно и принимаются на контролирующем объекте с временной задержкой, равной удвоенному групповому времени запаздывания 2tг,n. При поступлении рабочего сигнала Pn(t) в вычислителе определяется групповое время tr,n как средневзвешенное по всей временной реализации сигнала Pn(t) с учетом его дисперсионного уширения, причем весовой функцией при таком усреднении является мгновенная мощность сигнала P
При поступлении двух задержанных друг относительно друга сигналов P1,n(t) и P1,n+1(t)(t-T) в вычислителе определятся функция их взаимной корреляции Kn.n+1(τ), эффективная длительность которой не более 2T2, а положение максимума на временней оси соответствует фазовому времени запаздывания tф,n.
Наклонная дистанция Dn через измененные групповое tг,n и фазовое tф,n время вычисляется по формуле
где роль расстояния между точками приема в направлении распространения играет величина ln= dn•cosαn
αn - угол между направлением излучения и направлением оси x.
Теперь можем переписать выражение (1) в проекциях на ось x: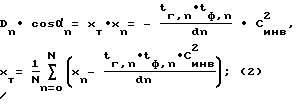
где dn расстояние между n и (n+1) измерениями координат на галсе x, xт точка траверза на оси x.
Выражение (2) позволяет определить только траверзное расстояние xт.
Повторяя измерение вдоль второго галса, совмещенного с осью y локальной системы координат, можно определить траверзное расстояние yт и расстояние между контролируемым объектом и траверзными точками Dx, Dy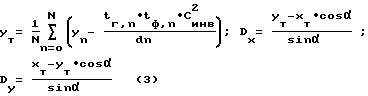
Устройство для измерения расстояния работает следующим образом. Сигнал частоты w вырабатываемый генератором сигналов 3, и сигнал модулятора 5, который запускается синхронизатором 2, подаются на умножитель 4, выход которого соединен со входом усилителя мощности 6. Усиленный импульс подается на акустический излучатель 7 и излучается в воду. Синхронно с излучением в вычислитель 11 вводятся данные о местоположении контролирующего объекта от спутниковой навигационной системы GPS 14, которые преобразуются в отсчеты xn, положения двигающегося равномерно и прямолинейно контролирующего объекта на галсе, совмещенном с осью x локальной системы координат.
Акустические сигналы, принятые приемником 17 на контролируемом объекте, после усиления усилителем 18 и фильтрации фильтром 19 поступают через пороговое устройство 20 на второй модулятор 21. Сигнал с модулятора вместе с сигналом второго генератора сигналов 25 поступают на второй перемножитель 22, а после усиления вторым усилителем 23 переизлучаются вторым излучателем 24.
Переизлученные сигналы принимаются на контролирующем объекте вторым акустическим приемником 8, усиливаются вторым усилителем 9 и после фильтрации вторым фильтром 10 поступают в вычислитель 11, работой которого управляет синхронизатор 2.
Аналогичным образом выполняется второй галс, совмещенный с осью y локальной системы координат.
Полная информация о местоположении контролирующего объекта на галсах (xn, yn), сигнальная информация Pn(t), а также данные об инвариантной скорости Cинв и временных интервалах T2, T1, поступает в вычислитель, обрабатываемые по приведенным выше алгоритмам отображается на индикаторе 15 с вычислением искомых расстояний по формулам (2), (3).
Источники информации:
1. П. Х.Милн. Гидроакустические системы позиционирования. Л. Судостроение, 1989, с. 17
2. Патент Российской Федерации N 2037848, G 01 S 15/18 1995.
Изобретения относятся к области гидроакустических дальномерных средств и могут быть использованы при разработке гидроакустических дальномерных систем повышенной точности, предназначенных для работы в водоемах с большими дисперсионными искажениями акустических сигналов. В способе измерения расстояния, включающем генерацию и излучение акустического сигнала синхронизированного с началом отсчета времени в месте приема, прием сигнала двумя акустическими приемниками, разнесенными в направлении распространения волны на расстояние l и предварительное определение инвариантной скорости Cинв и интервалов времени T2 и T1, в качестве рабочего сигнала используют периодический (с периодом T) импульсный сигнал. На контролируемом объекте ретранслируют принимаемые сигналы. На контролирующем объекте, двигающемся равномерно и прямолинейно относительно контролируемого объекта, по двум пересекающимся под углом α галсам, периодически определяют координаты (xn, yn) с помощью спутниковой навигационной системы, синхронно с излучением акустического сигнала определяют по совокупности N измерений координат (xn, yn) положение траверзных точек xт, yт и определяют расстояние от траверзных точек с координатами xт, yт до контролируемого объекта. Устройство для измерения расстояния содержит на контролирующем объекте генератор сигналов, перемножитель, синхрониэатор, модулятор, усилители мощности, акустические излучатель и приемник, второй фильтр, вычислитель, блоки задания инвариантной скорости и временных интервалов, спутниковую навигационную систему (GPS) и индикатор. При этом первый вход перемножителя соединен с выходом генератора сигналов, первый выход синхронизатора соединен со входом модулятора, выход которого соединен со вторым входом перемножителя, вход усилителя мощности соединен с выходом перемножителя, а выход усилителя мощности с акустическим излучателем, выходы второго фильтра, блоков заданий инвариантной скорости и временных интервалов, синхронизатора и спутниковой навигационной системы (типа GPS) соединены со входами вычислителя, вход индикатора соединен с выходом вычислителя. На контролируемом объекте размещены последовательно соединенные первый акустический приемник, усилитель и фильтр, пороговое устройство, вторые: модулятор, перемножитель, усилитель мощности и акустический излучатель, а выход второго генератора сигналов соединен с первым выходом второго усилителя мощности. 2 с. п. ф-лы, 3 ил.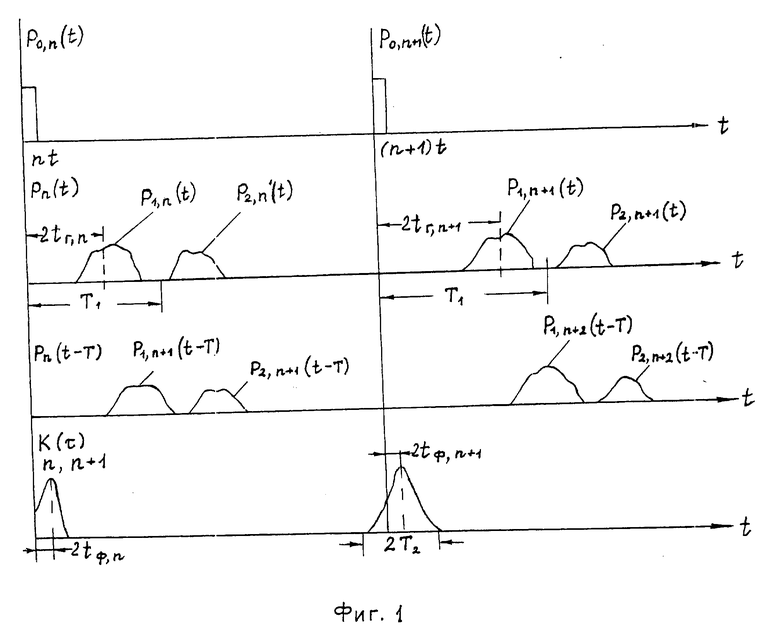
где dn расстояние между n и n+1 измерениями координат на галсах,
и определяют расстояния от траверзных точек с координатами хт, yт до контролируемого объекта по формулам
при этом групповое и фазовое время определяют по формулам
где
Т период следования импульсного сигнала;
Pn(t) последовательно принимаемые на контролирующем объекте сигналы;
τ - переменное время задержки в пределах временного интервала (-Т2, Т2).
| RU, патент, 2037848, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
