Изобретение относится к гидроакустике и может быть использовано при разработке гидроакустических дальномерных систем повышенной точности, предназначенных для работы в водоемах типа волноводов с большими дисперсионными искажениями акустических сигналов.
Известен гидроакустический дальномер, в котором измеряемое расстояние r и время распространения t акустического сигнала в среде между излучателем и приемником связаны соотношением r= C t (1), где C скорость звука в среде, имеющая смысл групповой скорости, усредненной по трассе распространения, если среда является неоднородной.
В водоеме типа волновода точки излучения и приема связаны набором, лучевых траекторий, а время распространения изменяется от некоторого минимального, соответствующего макcимальной групповой скорости Сmax в волноводе, до некоторого макcимального, cоответcтвующего минимальной групповой cкороcти Сmin, называемой обычно скоростью волны Эйри. Физически это означает уширение акустического сигнала вследствие дисперсии на величину δt t ˙ δ c/C, где δС Cmax Cmin, C некоторая средняя скорость, при этом погрешность акустического дальномера, работающего по алгоритму (1), становится недопустимо большой
δr= c ˙ δt r ˙ δ c/c; ≈ (20÷30)%
≈ (20÷30)%
Известен способ измерения расстояния, использующий понятие инвариантной скорости Синв, которая функционально выражается через фазовую Сф и групповую Сг скорость распространения акустического сигнала в водоеме типа волновода и для различных лучевых траекторий сохраняет постоянное значение. Так, например, для однородных мелководных водоемов инвариантная скорость определена соотношением Синв2 Сф ˙ Сг.
Суть известного способа заключается в одновременном измерении фазовой скорости Сф и группового времени запаздывания tг акустического сигнала.
Способ измерения расстояния реализуется устройством, состоящим из контролирующего объекта, в который входят передатчик электромагнитных волн, синхронизированные генераторы высокой ω и низкой Ω частоты, умножитель, усилитель мощности, излучатель амплитудно-модулированного акустического сигнала, и контролируемого объекта, в который входят приемник электромагнитных волн, два акустических приемника, разнесенных в пространстве на расстояние l, меньшее длины волны на частоте, ω два фазометра. блок задания инвариантной скорости и вычислитель.
С помощью первого фазометра измеряется разность фаз Δϕ(Ω) низкочастотного акустического сигнала за время прохождения им контролируемого расстояния, причем за опорный принимается синхронно излучений с ним в эфир электромагнитный сигнал частоты ω
С помощью второго фазометра измеряется разность фаз Δϕ(ω) между высокочастотным составляющими акустического сигнала, принятого двумя акустическими приемниками, разнесенными на расстояние l в направлении распространения акустической волны.
Контролируемое расстояние вычисляется по формуле
r  C
C C
C tг,
tг,
имеют смысл обратной фазовой скорости м группового времени запаздывания, а погрешность определения расстояния по алгоритму (2) определяется инструментальными погрешностями измерителей фазы и погрешностью задания инвариантной скорости и не зависит от дисперсионных искажений сигнала,
Недостатком такого дальномера является большая погрешность измерения фазовой скорости через измеренную разность фаз Δϕ(ω) с помощью двух пространственно разнесенных акустических приемников, связанная разбросом их фазовых характеристик.
Задачей изобретения является уменьшение погрешности измерения расстояния в условиях сильных дисперсионных искажений акустического сигнала в водоемах типа волновода.
Поставленная задача решается тем, что в известном способе измерения расстояния, включающем генерацию и излучение акустического сигнала высокой частоты ω промодулированного низкой частотой Ω излучение синхронно с ним электромагнитного сигнала частоты ω, используемого в качестве опорного сигнала, измерение набега фазы Δϕ(Ω) на низкой частоте за время прохождения контролируемого расстояния, определение фазовой скорости Сф(ω) на высокой частоте в пункте приема, предварительное определение инвариантной скорости распространения звука Синв и определение расстояния r, измеряют на высокой частоте давление Р (ω), колебательную скорость в направлении распрост- ранения V(ω), плотность среды ρ и определяют в пункте приема фазовую скорость по соотношению
Сф(ω) Р (ω)/ρ˙ V(ω) (3), а расстояние r определяют по соотношению
r  C
C
Поставленная задача решается также тем, что в устройство для измерения расстояния, содержащем размещенные на контролирующем объекте синхронизированные генераторы низкой и высокой частоты, перемножитель, первый вход которого связан с входом генератора высокой частоты, а второй его вход с выходом генератора низкой частоты, усилитель мощности, вход которого связан с выходом перемножителя, акустический излучатель, вход которого связан с выходом усилителя мощности, передатчик электромагнитных волн, вход которого связан с выходом генератора высокой частоты, размещенные на контролируемом объекте последовательно соединенные первый акустический приемник, усилитель и первый фильтр, последовательно соединенные второй акустический приемник, усилитель и второй фильтр, приемник электромагнитных волн и фазометр, первый вход которого соединен с выходом приемника электромагнитных волн, детектор акустического сигнала, вход которого соединен с выходом первого акустического приемника, а выход соединен с вторым входом фазометра, блок задания инвариантной скорости, вычислитель, первый вход которого соединен с выходом фазометра, а второй вход с выходом блока задания инвариантной скорости, индикатор, вход которого связан с выходом вычислителя, введены измеритель звукового давления, вход которого соединен с выходом первого фильтра, а выход с третьим входом вычислителя, измеритель колебательной скорости, вход которого соединен с выходом второго фильтра, а выход с четвертым входом вычислителя, причем в качестве первого акустического приемника использован приемник звукового давления, а в качестве второго акустического приемника использован приемник колебательной скорости, ориентированный вдоль измеряемого расстояния.
В качестве измерителя колебательной скорости в направлении распространения акустического сигнала использован однокомпонентный векторный приемник (приемник колебательной скорости), а в качестве измерителя звукового давления гидрофон, образующие в совокупности комбинированный приемник.
Погрешность измерения фазовой скорости по алгоритму (3) и расстояния по алгоритму (4) определяется точностью калибровки комбинированного приемника.
С выхода фазометра, измеряющего разности фаз Δϕ(Ω) за время прохождения контролируемого расстояния, информация поступает на первый вход вычислителя, который по измеренным величинам Δϕ(Ω), Р (ω), V (ω) и заданным величинам ρ, Ω, Синв вычисляет по алгоритму (4) искомое расстояние. Использование измерителей колебательной скорости и давления с последующим вычислением фазовой скорости в точке приема по алгоритму (3) позволяет значительно уменьшить погрешность ее определения.
В способе, соответствующем изобретению, обратная фазовая скорость определена формулой Cф-1= ρ˙ V(ω)/P (ω), а относительная погрешность ее определения в основном определяется погрешностью измерения давления и колебательной скорости =
=  +
+ -2·K
-2·K ≈ 2
≈ 2 1-K
1-K (5), где δ V, δ P соответствующие погрешности измерения колебательной скорости и давления, причем δ V/V ≃ δP/P, К12 коэффициент корреляции случайных величин V (ω, t), P (ω, t).
(5), где δ V, δ P соответствующие погрешности измерения колебательной скорости и давления, причем δ V/V ≃ δP/P, К12 коэффициент корреляции случайных величин V (ω, t), P (ω, t).
При использовании образцовых средств измерения  (5-6)% а для уменьшения суммарной погрешности в соответствии с (5) необходимо, чтобы размер измерительного комбинированного приемника был мал в сравнении с длиной волны, при этом К12 ->> 1, а погрешность (δ Сф-1/Cф-2) может быть существенно снижена в сравнении с исходной погрешностью образцового приемника давления.
(5-6)% а для уменьшения суммарной погрешности в соответствии с (5) необходимо, чтобы размер измерительного комбинированного приемника был мал в сравнении с длиной волны, при этом К12 ->> 1, а погрешность (δ Сф-1/Cф-2) может быть существенно снижена в сравнении с исходной погрешностью образцового приемника давления.
На чертеже представлена структурная схема устройства, реализующего способ измерения расстояния.
Устройство содержит размещенные на контролирующем объекте 1 передатчик электромагнитных волн 2, генератор высокой частоты ω 3, перемножитель 4, генератор низкой частоты Ω 5, усилитель мощности 6, акустический излучатель 7 и на контролиpуемом объекте 8 приемник электромагнитных волн 9, фазометр 10, детектор 11, первый фильтр 12, блок задания инвариантной скорости 13, вычислитель 14, индикатор 15, первый акустический приемник 16, первый усилитель 17, второй акустический приемник 18, второй усилитель 19, измеритель звукового давления 20, второй фильтр 21, измеритель колебательной скорости 22.
Устройство для измерения расстояния работает следующим образом.
Сигнал высокой частоты ω вырабатываемый генератором 3, модулируется сигналом низкой частоты Ω вырабатываемым генератором 5, синхронизированным с генератором 3, и через усилитель мощности 6 подается на излучатель 7 и излучается в водную среду. Одновременно сигнал высокой частоты ω через передатчик электромагнитных волн 2 излучается в эфир. Принятый приемником электромагнитных волн 9 сигнал поступает в качестве опорного на первый вход фазометра 10. Акустические сигналы, принятые гидрофоном 16 и приемником колебательной скорости 18, усиливаются усилителями 17, 19 и подаются через фильтры 12, 21 на измеритель 20 звукового давления и измеритель 22 колебательной скорости, с выходов которых измеренные значения Р (ω), V (ω) поступают на третий и четвертый входы вычислителя 14. Одновременно сигнал с выхода усилителя 17 через детектор 11 поступает на второй вход фазометра 10, измеряющего набег фазы Δϕ(Ω) низкочастотного сигнала за время пробега или контролируемого расстояния, выход которого соединен с первым входом вычислителя 14, на второй вход которого поступают заданные в блоке 13 значения инвариантной скорости. Вычислитель вычисляет искомое расстояние по алгоритму
r  C
C
Использование: гидроакустика, в частности гидроакустические дальномерные системы повышенной точности, используемые в водоемах с большими дисперсионными искажениями акустических сигналов. Сущность изобретения: способ включает генерацию и излучение акустического сигнала, излучение синхронно с ним электромагнитного сигнала, используемого в качестве опорного сигнала, измерение набега фазы на низкой частоте за время прохождения контролируемого расстояния, определение инвариантной скорости распространения звука и определение фазовой скорости в пункте приема через измерение на высокой частоте давления, колебательной скорости в направлении распространения и плотности среды и вычисление расстояния по измеренным данным. Устройство содержит на контролирующем объекте 1 передатчик электромагнитных волн 2, генератор высокой и низкой частоты 3, 5, перемножитель 4, усилитель мощности 6 и акустический излучатель 7, на контролируемом объекте 8 приемник электромагнитных волн 9, фазометр 10, детектор 11, первый и второй 12, 21 фильтры, блок задания инвариантной скорости 13, первый 16 и второй 18 акустические приемники, первый и второй усилители 17 и 19, измерители звукового давления и колебательной скорости 20, 22. 2 с.п. ф-лы, 1 ил.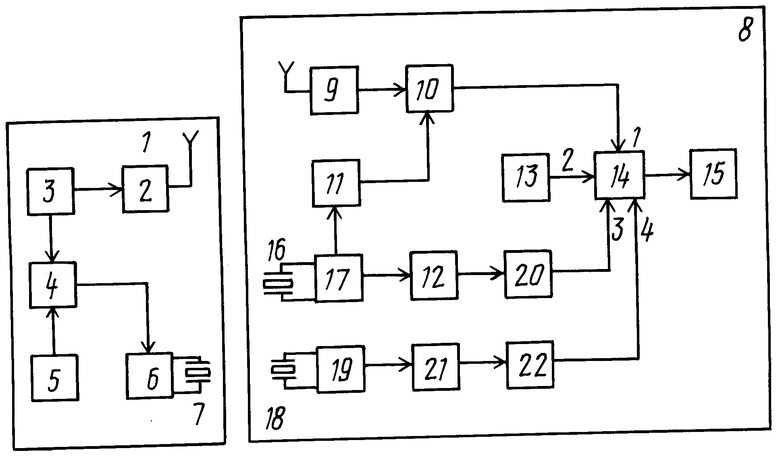
Cф(ω) = P(ω)/ρ·V(ω) ,
а расстояние определяют по соотношению
2. Устройство для измерения расстояния, содержащее размещенные на контролирующем объекте синхронизированные генераторы низкой и высокой частоты, перемножитель, первый вход которого связан с выходом генератора высокой частоты, а второй его вход с выходом генератора низкой частоты, усилитель мощности, вход которого связан с выходом перемножителя, акустический излучатель, вход которого связан с выходом усилителя мощности, передатчик электромагнитных волн, вход которого связан с выходом генератора высокой частоты, размещенные на контролируемом объекте последовательно соединенные первый акустический приемник, усилитель и первый фильтр, последовательно соединенные второй акустический приемник, усилитель и второй фильтр, приемник электромагнитных волн и фазометр, первый вход которого соединен с выходом приемника электромагнитных волн, детектор акустического сигнала, вход которого соединен с выходом первого акустического приемника, а выход с вторым входом фазометра, блок задания инвариантной скорости, вычислитель, первый вход которого соединен с выходом фазометра, а второй вход с выходом блока задания инвариантной скорости, индикатор, вход которого связан с выходом вычислителя, отличающееся тем, что в него введены измеритель звукового давления, вход которого соединен с выходом первого фильтра, а выход с третьим входом вычислителя, измеритель колебательной скорости, вход которого связан с выходом второго фильтра, а выход с четвертым входом вычислителя, причем в качестве первого акустического приемника использован приемник звукового давления, а в качестве второго акустического приемника приемник колебательной скорости, ориентированный вдоль измеряемого расстояния.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1327685, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
