Изобретение относится к устройству для терапевтической реабилитации опорно-двигательного аппарата.
Известно, что большая часть случаев люмбаго и люмбаго/ишиаса в основном происходит из-за неправильного положения, которое характеризуется чрезмерным наклоном таза вперед. Это явление совместно с поясничными перегрузками, которые происходят вследствие этого, приводит к болевым симптомам, типичным для этих заболеваний, которые являются следствием процесса перерождения диска, наиболее часто происходящего в зоне промежутка L5-S1. Период времени, который проходит между принимаемым неправильным положением и началом болевых симптомов, может измеряться годами, если не десятилетиями.
Применяемые в настоящее время терапевтические процедуры носят фармакологический, физиотерапевтический и кинезитерапевтический характер. В этом отношении, в частности, следует упомянуть нестероидные и стероидные противовоспалительные препараты, источники поверхностного и глубинного прогревания и массажную терапию. Что касается кинезитерапии, то различные указания, ставящие своей целью облегчение напряжения позвоночного столба, обычно связаны с управлениями, разработанными для укрепления мышц, используемых при наклоне таза назад. Сильно изменяющийся характер результатов, полученных при использовании этих способов, создает четкое впечатление, что корень проблемы не затронут.
Можно утверждать, что с физиологической точки зрения наклон таза вперед может обеспечиваться достаточным образом не столько за счет общего укрепления мышц, способных обеспечить наклон таза назад, сколько посредством восстановления надлежащего синергического функционирования некоторых мышечных групп на определенных участках мышц. В определенном случае люмбаго и люмбаго/ишиаса вовлеченные группы мышц по существу представляют собой ишиоберцовые мускулы. Правильность этой точки зрения подтверждена большой серией клинических экспериментов, проведенных заявителем и основанных с теоретической точки зрения на специальной неврологической литературе.
Установлено, что надлежащая стимуляция определенных мышечных групп наряду с ощущаемыми управлениями при отсутствии визуальной информации, предполагающими физические параметры, взаимосвязанные с этой стимуляцией, приводит к быстрому восстановлению правильного функционирования этих мышечных групп, и, следовательно, в определенном смысле ишиоберцовых мышц к улучшенному контролю за наклоном таза вперед. Здесь и в остальной части настоящего описания под "стимуляцией" понимается терапевтическая манипуляция математической /топологической пространственной совокупностью, включающей в себя длину мышц, мышечное натяжение, скорость изменения длины мышц.
Такой способ успешно использовался при реабилитации парализованных пациентов и, в частности, при реабилитации одной конечности гемиплегических пациентов, с тем чтобы восстановить двигательные функции, вызванные повреждением центральной нервной системы, как сосудистого, так и травматического характера. Для этой цели разработана машина, посредством которой пациент подвергается терапевтическому управлению, состоящему в стимуляции определенных мышечных групп, при этом пациента просят проявить ощущаемую активность для оценки, например, степени пассивного движения, которому подвергается конечность, или для сравнения с ранее вызванной стимуляцией (стимуляциями).
Установлено, что пациенты, подвергаемые лечению вышеупомянутого типа, быстро приобретают способность произвольно выполнять эти движения, вначале вызываемые искусственным путем посредством упомянутых стимуляций.
Известна машина, используемая для стимуляций, обеспечивающих реабилитацию парализованных пациентов, которая позволяет лишь осуществлять другое терапевтическое упражнение и дает плохие результаты в случае, если ее использовать для достижения цели по изобретению. Она содержит в сочетании первые средства, состоящие из подвижной платформы, служащей для направления парализованной конечности пациента, например нижней конечности, вдоль заданной траектории и в соответствии с заданной формой движения, которая также задана, так что, по меньшей мере, одна мышца парализованного органа одновременно подвергается кинематическому противодействию и действию растягивающего усилия, а также содержит вторые средства, сконструированные для того, чтобы регулируемым способом изменить траекторию и/или форму движения конечности, направляемой первыми средствами, с тем, чтобы создать у пациента стимулы восприятия, воздействующие на почти полностью парализованную конечность. Таким образом можно обеспечить все эти условия воздействия на мышцы кинематического противодействия и в то же время растягивающего усилия и создание нервных импульсов, направленных к этим мышцам, что представляет собой необходимые условия для реабилитации парализованной конечности.
Однако не показана эффективность этой машины при терапевтическом лечении люмбаго и люмбаго/ишиаса, поскольку она не обеспечивает того, чтобы эти мышечные группы, а именно ишиоберцовые мышцы, которые подвергаются расстройству этого типа, находились в напряжении. Первоначальная оценка состояния пациента имеет фундаментальное значение при предписании лечения. Используя вышеуказанную машину, не представляется возможным избирательно направить заданную стимуляцию на пятку с тем, чтобы создать противодействие реакцию, которая подвергает ишиоберцовую группу мышц растягивающему усилию.
Цель изобретения создание устройства, которое будучи основанным на клинической методологии, описанной выше и уже проверенной экспериментально при реабилитации парализованных пациентов, обеспечивает возможность проведения терапевтического лечения люмбаго и люмбаго/ишиаса.
Цель изобретения достигается за счет того, что в известное устройство для терапевтической реабилитации опорно-двигательного аппарата, содержащее раму со шкивами на осях, установленные на раме неподвижную и подвижную в угловом направлении плиты для стоп, а также нагрузочный механизм со сменным противовесом, кинематически соединенный посредством расположенной на шкивах гибкой связи с подвижной плитой, введены размещенные в раме общая ось и уравновешивающий механизм, кинематически связанный с подвижной плитой, а также закрепленная на раме направляющая и установленный неподвижно на общей оси дополнительный блок со штоком, присоединенный к сменному противовесу, при этом подвижная плита выполнена в виде консольных, раздельно шарнирно установленных в раме передней и задней площадок с жестко закрепленными на них секторными блоками, шкивы выполнены заодно с общей осью, а концы гибких связей зафиксированы на секторных блоках, при этом уравновешивающий механизм выполнен в виде двух жестко связанных с общей осью и расположенных под прямым углом друг к другу кронштейнов с установленными на них с возможностью перемещения и фиксации грузами, причем подвижная плита выполнена с возможностью наклона к горизонтали и регулирования расстояния и высоты установки передней и задней ее площадок относительно неподвижжной плиты, а сменный противовес установлен на направляющей подвижно.
Подвижная плита для стопы состоит из двух смежных частей, называемых передней частью и задней частью, на которые пациент устанавливает стопу так, чтобы пятка находилась на задней части плиты, а передняя часть стопы находилась на передней части. Кроме того, созданы уравновешенные противовесные средства для балансировки подвижной плиты для стопы, к которым две ее части подсоединены через соответствующие приводные средства, сконструированные для передачи крутящих моментов в направлении, противоположном упомянутым противовесным средствам, при этом угловое смещение части упомянутой плиты для стопы в одном направлении приводит к смещению другой части на такую же величину в противоположном направлении. Таким образом, уравновешенные противовесные средства сконструированы для установления большого количества равновесных положений для передней и задней части подвижной плиты и стопы, причем эти положения отличаются изменением сопротивления нагрузке, прилагаемой пациентом. Упомянутые средства содержат переменный противовес, который может скользить в соответствии с перемещениями упомянутой подвижной плиты для стопы, а также переменное уравновешивающее соединение, сконструированное для торможения движения скольжения противовеса.
Предпочтительно, чтобы уравновешенные противовесные средства дополнительно содержали ось вращения, подсоединенную к двум частям подвижной плиты для стопы через приводные средства и подвергаемую действию противоположных крутящих моментов, прилагаемых противовесом и плитой для стопы, при этом уравновешивающее соединение состоит из двух рычагов, которые выполнены заодно с осью и отделены в угловом направлении, которые несут два расположенных вдоль них сокльзящих груза.
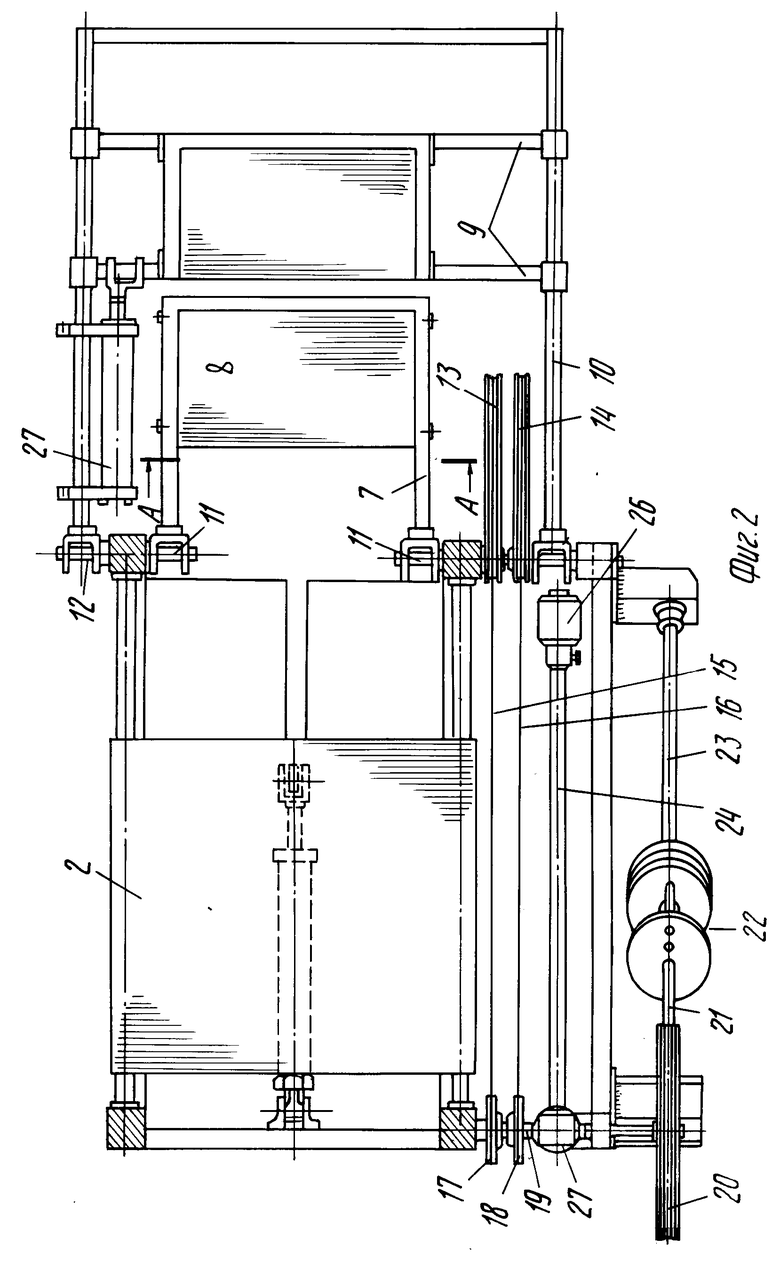
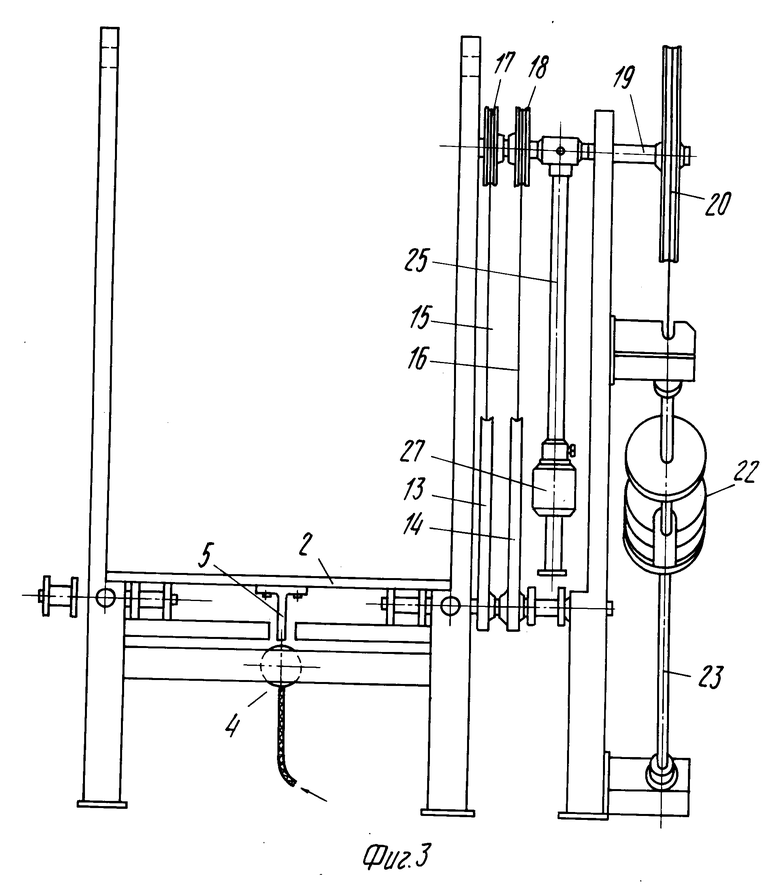
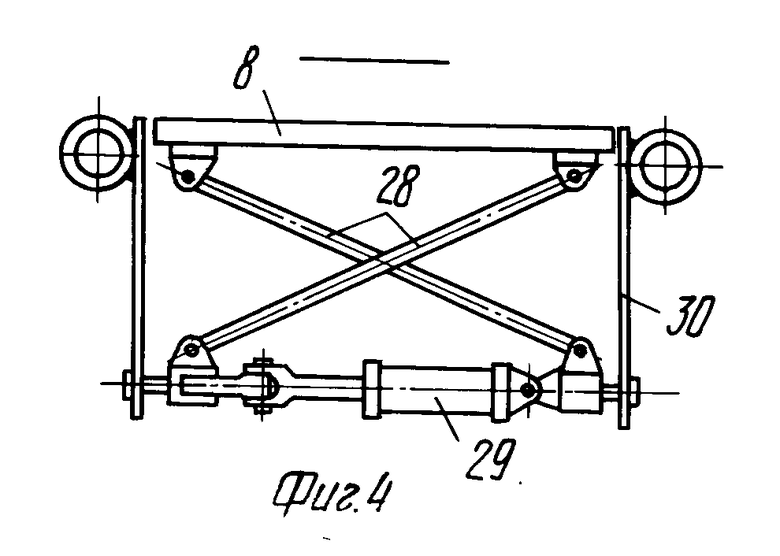
На фиг. 1 изображено устройство, вид сбоку; на фиг.2 то же, вид сверху; на фиг.3 то же, вид сзади; на фиг.4 разрез А-А на фиг.2.
Устройство содержит опорную раму 1, состоящую из стоек и поперечных деталей, неподвижно закрепленную плиту 2 для стопы, которая удерживается двумя горизонтальными направляющими 3, выполненными заодно с рамой 1, и которая в зависимости от предъявляемых требований может быть расположена вдоль упомянутых стержней посредством дополнительного блока 4, который является гидравлическим или пневматическим, либо подобным им, шток поршня которого через кронштейн 5 жестко подсоединен к самой плите для стопы. Подвижная плита 6 для стопы, состоящая из задней части и передней части, выполнена таким образом, чтобы с передней стороны совпадать с неподвижно закрепленной плитой 2 для стопы и оперативно располагаться в наклонном положении по отношению к горизонтали. Задняя часть жестко прикреплена к паре рычагов 7, с обеспечением возможности поворота консольно подсоединена к раме 1 машины, в то время как вторая часть 8 с передней стороны подобным же образом через пару поперечин 9 жестко прикреплена к паре рычагов 10, которые параллельны рычагам 7 и находятся снаружи от последних и которые с обеспечением возможности поворота консольно подсоединены к раме 1 машины.
Две пары рычагов 7 и 10 подсоединены к раме 1 машины посредством двух соответствующих пар пальцев 11 и 12, с которыми упомянутые рычаги выполнены заодно и которые с обеспечением возможности вращения удерживаются смежными стойками рамы 1. На двух пальцах 11 и 12, также заодно с ними, установлены два секторных блока 13 и 14, подсоединенных через ремни 15 и 16 к двум соответствующим блокам 17 и 18, установленным посредством шпонок на оси 19, с обеспечением возможности вращения удерживаемой верхней частью рамы 1. Два ремня 15 и 16 наматываются в противоположных направлениях на соответствующие шкивы 17 и 18, так что вращение сектора 13 в одном направлении приводит к вращению 14 в противоположном направлении. Иными словами, резюмируя, можно сказать, что смещение задней части вниз приводит к смещению передней части вверх на такую же величину. На оси 19 посредством шпонки установлен дополнительный блок 20, причем к нему жестко крепится один конец тяги-штока 21, другой конец которого жестко прикреплен к переменному противовесу 22, вынужденному скользить вдоль направляющей 23, идущей по диагонали вдоль одной стороны рамы 1 и жестко прикрепленной к ней по концам. Тяга-шток 21 подсоединен к шкиву 20 таким образом, чтобы крутящий момент, оказываемый на ось 19 через упомянутую тягу-шток, отличался от крутящего момента, оказываемого на него задней частью через сектор 13, шкив 17 и соединительный ремень 15. Два рычага 24 и 25, которые являются копланарными и отстоят друг от друга в угловом направлении, проходят радиально от оси 19, на которой они жестко установлены. Плоскость, в которой лежат два кронштейна 24 и 25, является вертикальной, причем в данном случае последние отстоят друг от друга на 90о. Два кронштейна 24 и 25 имеют установленные на них грузы 26 и 27, которые скользят и могут быть расположены в любой точке вдоль них.
Расстояние передней части подвижной плиты 6 для стопы от задней части может регулироваться в соответствии с предъявляемыми требованиями, поскольку поперечины 9, которые их удерживают, с возможностью скольжения установлены на рычагах 10 и дополнительно подсоединены к штоку поршня приводного устройства, которое является гидравлическим, пневматическим и тому подобным, и которое может приводиться в действие таким образом, чтобы перемещать переднюю часть вперед и назад.
Можно настроить машины для дополнительного регулирования положения двух частей относительно плоскости, в которой лежит неподвижно закрепленная направляющая 3 для стопы. С этой целью, как, в частности, показано на фиг.4 для задней части, последняя не удерживается непосредственно поперечинами 9, а вместо этого удерживается по меньшей мере двумя парами штоков 28, которые пересекаются и шарнирно соединены в их средней точке, а также подсоединены к концам приводного устройства 29, которое является гидравлическим или пневматическим, либо подобным им, и которое в свою очередь удерживается двумя плитами 30, идущими от поперечин 9. Работа приводного устройства 29 приводит к изменению угла пересечения штоков 28 и к соответствующему подъему или опусканию части плиты стопы. Подобное устройство для установки в вертикальное положение выполнено для передней части, так что две плиты для стопы могут подниматься или опускаться по отношению к неподвижно закрепленной плите 2 для стопы.
Если одна стопа располагается на двух частях подвижной плиты, причем можно допустить, что они копланарны, а другая располагается на неподвижно установленной плите 2 и вес тела прилагается к подвижной плите 6, то, если предположить, что имеет место равное распределение нагрузки на двух частях, противовес 22 не будет перемещаться, поскольку ремни 15 и 16 передают валу 19 силы растяжения, имеющие одну и ту же интенсивность и действующие в одном направлении, и, следовательно, создают переменный крутящий момент. Если нагрузка на две части распределяется несимметрично, происходит скольжение противовеса 22 и будет иметь место соответствующее, выполняемое заодно вращение пары кронштейнов 24 и 25 в направлении часовой стрелки или против часовой стрелки в зависимости от того, прилагается ли нагрузка к задней части, т.е. к пятке, или к передней части стопы. Поскольку опускание задней части вызывает подъем передней части и, наоборот, достаточно небольшое относительное движение для восстановления баланса системы, так как со стопой, представляющей собой непрерывный объект, хотя и до определенной степени гибкий, опускание, например, передней части немедленно приведет к прижиму задней части к передней части стопы.
При использовании машины пациент становится на нее таким образом, что одна ступня находится на неподвижно закрепленной плите 2, а другая на подвижной плите 6, а это по существу приводит к положению, занимаемому при ходьбе. Основное терапевтическое движение, которое требуется выполнить пациенту, состоит в перемещении веса тела с ноги, находящейся сзади, т.е. покоящейся на неподвижно закрепленной плите 2 для стопы, на ногу, расположенную спереди, т.е. опирающуюся на подвижную плиту 6 для стопы. Для того, чтобы оценить первоначальное состояние пациента, необходимо прежде всего проверить, куда она или переносит вес его или его тела для изменения расстояния между расставленными ногами на переднюю часть стопы или на пятку. Эта разница соответствует статическому структурному положению пациента, при этом вал 19 стремится повернуться, на пятку или на переднюю часть стопы распределяется нагрузка. Вначале терапевт также должен уравновесить нагрузку пациента путем регулирования груза 27, а затем перемещения груза 26 в соответствии с выбранным противовесом 22. Очевидно, что сопротивление, оказываемое подвижной плитой 6, пропорционально величине противовеса 22.
Перед тем, как выполняется каждое основное терапевтическое движение, терапевт регулирует грузы 22, 26 и 27 таким образом, чтобы в каждом случае изменить сопротивление, которое задняя часть подвижной плиты 6 для стопы оказывает пациенту, когда последний выполняет упомянутое движение. Передняя часть подвижной плиты 6 для стопы в основном располагается на более низком уровне, чем задняя часть, с тем чтобы действовать в качестве тормоза в отношении соприкосновения с передней частью стопы. Когда пациент совершает основное терапевтическое движение, которое в результате действия подвижной плиты 6 вызывает стимуляцию ишиоберцовых мышечных групп, он или она также должны проявлять воспринимаемую активность при отсутствии визуальной или слуховой информации, соотносящуюся по степени сопротивления при выполнении этого движения с сопротивлением, оказываемым в течение предшествующего движения. Иными словами, когда выполняется основное терапевтическое движение, пациент должен сказать о том, большее или меньшее сопротивление оказывает подвижная плита для стопы, чем в течение предшествующего движения; поскольку пациент не имеет доступа к какому-либо источнику сенсорной информации, он или она вынуждены сделать оценки в каждом требуемом ему или ей случае лишь на основании первых управляющих импульсов, соответствующих изменению длины и напряжения вовлеченных мышечных групп в течение выполнения движения.
Существенным критерием для объективной оценки результатов в течение лечения является изменение нагрузки в направлении пятки, обнаруживаемое при сравнении с первоначальной оценкой. Эта оценка также могла бы быть проведена посредством возможного использования датчиков нагрузки, установленных на задней части и на передней части подвижной плиты 6 для стопы.
В клиническом отчете было показано, что в среднем после трех дней терапевтического лечения, длившегося ежедневно в течение 20 мин, состоявшегo в воспринимаемых упражнениях, выполняемых так, как разъяснено выше, восстанавливалось правильное положение таза, с исключением поясничной перегрузки и более или менее полным выздоровлением пациента. Обычно болезненные симптомы исчезали начиная с первого дня лечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ПАЦИЕНТОВ С ПОВРЕЖДЕНИЕМ СПИННОГО И ГОЛОВНОГО МОЗГА | 2016 |
|
RU2639794C1 |
| НОВЫЕ СПОСОБЫ ДИАГНОСТИКИ И ЛЕЧЕНИЯ | 2014 |
|
RU2679515C2 |
| ВЫТЯЖНОЙ ШКАФ, СОДЕРЖАЩИЙ УЛУЧШЕННЫЙ ЭКРАН | 2018 |
|
RU2730308C1 |
| СПОСОБ ЭЛЕКТРОСТИМУЛЯЦИИ И ПРИБОР ДЛЯ ЭЛЕКТРОСТИМУЛЯЦИИ | 2018 |
|
RU2771207C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ МОБИЛЬНОСТИ ПАЦИЕНТОВ С ГЕМИПАРЕЗОМ | 2022 |
|
RU2783354C1 |
| СПОСОБ РЕАБИЛИТАЦИОННОГО ЛЕЧЕНИЯ ОБЕЗДВИЖЕННОГО БОЛЬНОГО | 2010 |
|
RU2435560C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕАБИЛИТАЦИИ НЕРВНОЙ, МЫШЕЧНОЙ И ДВИГАТЕЛЬНОЙ КООРДИНАЦИИ БОЛЬНЫХ С НАРУШЕНИЯМИ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 1998 |
|
RU2179009C2 |
| СПОСОБ ЛЕЧЕНИЯ ПАРАЛИТИЧЕСКОГО КОСОГЛАЗИЯ | 2004 |
|
RU2257914C1 |
| Способ моделирования лечения больных с двигательными и висцеральными расстройствами на лабораторных животных. | 2020 |
|
RU2749634C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
Использование: для терапевтической реабилитации опорно-двигательного аппарата. Сущность изобретения: машина для терапевтического лечения люмбаго и люмбаго/ишиаса содержит неподвижно закрепленную плиту 2 для стопы и плиту 6 для стопы, подвижную в угловом направлении в результате воздействия веса пациента, удерживаемого в вертикальном положении, с одной ступней на одной части плит 2, 6 и другой ступни на другой части плит 2, 6. Плиты 2, 6 для ступней расположены друг перед другом, так что пациент удерживается ими фактически в положении для ходьбы. Подвижная плита 6 для стопы содержит две смежные части, предназначенные действовать в качества опоры соответственно для передней части стопы и для пятки. Обе части подвижной плиты 6 для стопы подсоединены к сбалансированным противовесным средствам 22, 26, 27, сконструированным для удержания упомянутых частей в большом числе заранее определенных равновесных положений таким образом, что угловое смещение одной из упомянутых частей приводит к соответствующему противоположному угловому смещению другой части. Сбалансированные противовесные средства содержат переменный противовес 22, скользящий в ответ на перемещение частей плиты для стопы, и изменяемое уравновешивающее соединение 26, 27, сконструированное для торможения скользящего движения противовеса. Посредством изменения противовеса и уравновешивающего соединения можно изменить сопротивление подвижной плиты для стопы нагрузке. 2 з.п. ф-лы, 4 ил.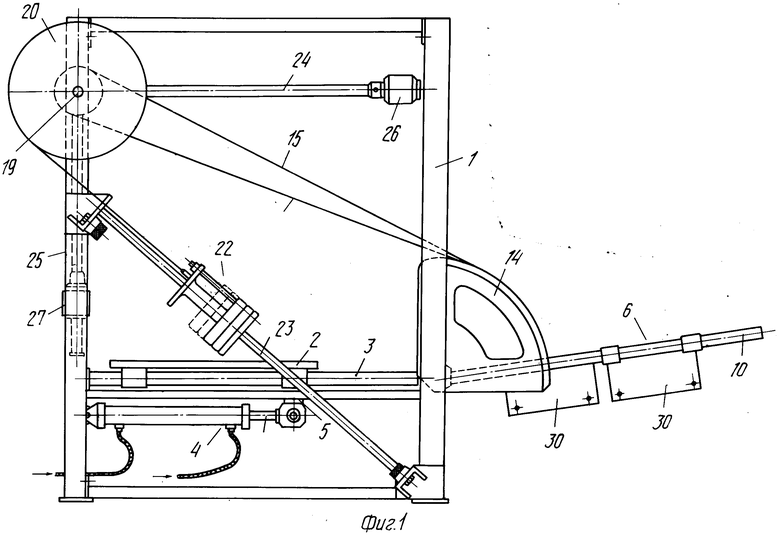
| Патент США N 4807874, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
