Изобретение относится к способу и устройству для реабилитации нервной, мышечной двигательной координации больных с поражениями центральной нервной системы (ЦНС) и может быть использовано для улучшения нервной, мышечной и двигательной активности больных детским церебральным параличом (ДЦП), перестройки функциональных связей нервной системы и компенсации нарушенных участков мозга за счет функционального переключения здоровых участков, улучшения речевой активности больных ДЦП, увеличения их способности концентрировать мыслительный процесс, снятия контрактур и спастики мышц, восстановления кровообращения больных ДЦП, больных, у которых такие нарушения возникли в результате травм перенесенного инсульта. Способ, соответствующий изобретению, может быть применен в качестве расслабляющей и восстанавливающей процедуры перед проведением сеансов мануальной терапии, для снятия усталости и восстановления на производстве.
Известен способ реабилитации больных детским церебральным параличом, описанный в книге Альманах "Исцеление" И.А. Скворцова, Научно-терапевтический Центр профилактики и лечения детской неврологической инвалидности, Москва, 1993 г. , стр. 11-24. Способ заключается в воздействии на организм комплекса внешних и внутренних возбудителей нервной системы за счет использования информационных триггеров (афферентных и молекулярных) аксодендритной арборизации со строгой топографической адресованностью. В качестве афферентного информационного триггера используют естественные зрительные, слуховые и проприоцептивные стимулы, а молекулярные информоны топографически направленно вводят в строго определенные зоны дерматомеров, склеромеров, миомеров и невромеров. В качестве молекулярных информонов вводят церебролизин и ряд других гидролизатных препаратов. Одним из основных регуляторных пептидов в составе церебролизина, обеспечивающим многофункциональное "информонное" обеспечение нейронов, является b-эндорфин. Введенные в результате метамерного обкалывания (до 150 уколов) микродозы церебролизина и другие активные вещества направляются к центральным сегментарным структурам спинного и головного мозга, чем обеспечиваются строгая топологическая направленность лечения и точное попадание информонных препаратов в нужный сегмент. Лечение проводится курсами по 2 недели с перерывами между курсами 3-6 месяцев и с 3-7 сеансами обкалывания во время курса.
Метод обеспечивает переинформирование аномально функционирующих нейронных популяций и восстановление межнейрональных связей в соответствии с нормативной генетической программой, что и обеспечивает коррекцию аномально измененных статикомоторных и психоречевых функций.
Однако данный известный способ эффективен при мягких спастических формах ДЦП у детей в возрасте 18-24 месяца. К недостаткам следует отнести необходимость введения лекарственных препаратов, слабость внешнего воздействия на проприоцепторы, не позволяющие в полной мере сформировать в мозге объемную картину тела и движения, болезненность метода, что в конечном счете отрицательно сказывается на состоянии нервной системы больного.
Известен также способ реабилитации больных ДЦП, описанный в вышеупомянутом источнике (стр. 55), включающий вибромассаж точечным вибратором, предварительно нагретым до температуры 40oC с амплитудой 0,5-1 мм и с частотой вибрации 10-100 Гц, избирательно воздействующий на мышцы, находящиеся в спастическом состоянии. После воздействия вибрационного массажа проводят лечебную гимнастику, направленную на разработку суставов. Вибрация оказывает рефлекторное влияние на функциональное состояние нервной системы и способствует восстановлению нарушенного баланса мышц антагонистов путем снижения тонуса спастических мышц.
Данный способ реабилитации обеспечивает воздействие только на отдельные мышцы, что не позволяет изменить общую картину функциональных связей нервной системы, в связи с чем достигается только незначительный временный эффект. Кроме того, вибрационное воздействие в основном приложено перпендикулярно мышечным волокнам в направлении, не совпадающем с направлением естественного сокращения и растяжения мышечных волокон.
Известен способ улучшения координации работы мышц, описанный в книге В. Т. Назарова "Биомеханическая стимуляция. Явь и надежды", Минск, "Полымя", 1986 г., стр. 5-93, включающий вибрационное воздействие частотой 14-50 Гц на напряженные мышечные волокна в направлении их естественного сжатия и растяжения (биомеханическая стимуляция), причем частоту вибрации преимущественно выбирают совпадающей с частотой собственных сокращений мышц (состояние мышечного резонанса). Это достигается тем, что, например, к напряженной слегка согнутой руке в районе запястья прикладывается вибрационное воздействие в направлении разгибания руки. Рука в такт и с амплитудой вибрации будет сгибаться и разгибаться, что передает вибрацию к мышцам кисти, предплечья и частично плечевого пояса. Таким образом, под воздействием вибрации происходят синхронное сокращение и растяжение мышечных волокон комплекса всех мышц руки, капсул суставов, увеличивается кровообращение, что обеспечивает терапевтический эффект. Вследствие принудительного резонансного сокращения и растяжения мышечных волокон с большой амплитудой разрываются спайки, образованные в результате травм или микротравм мышц, происходит мощное раздражение проприоцепторов мышц, вовлеченных в вибрационный процесс, что и приводит к восстановлению координации мышц.
Недостатком описанного способа является то, что вследствие статического положения руки или ноги в пространстве в мозгу запоминается только картина напряженных мышц в статике.
Наиболее близким к изобретению является способ, описанный в авторском свидетельстве 1523152, при котором осуществляют низкочастотное вибрационное воздействие на напряженные мышцы руки или ноги, причем вибратор соединен с упругим элементом, и тренирующийся, прикладывая соответствующую часть тела к вибратору (вибрирующая насадка вибратора), одновременно преодолевает силу упругой деформации упругого элемента, а вибратор при этом смещают вдоль направляющей.
Данный способ обеспечивает тренировку мышц в динамическом режиме, что увеличивает эффективность тренировки. Однако он не может быть использован для реабилитации больных с нарушением центральной нервной системы. Это объясняется тем, что для эффективного использования данного способа необходимо, чтобы изначально больной обладал достаточной координацией всех мышц и был способен развивать тянущее или толкательное усилие в данном конкретном направлении, жестко задаваемом направляющими, по которым смещают вибратор, в то время как именно отсутствие такой координации, спастическое состояние мышц, нарушение их управляемости характерно для больных ДЦП, перенесших инсульт, а также со значительными нарушениями мышечной координации в результате травм мышц и нервных волокон. Кроме того, данный способ не позволяет осуществить принудительное движение больному при приложении вибрации в области пространства, в которой самостоятельные движения больного затруднены или невозможны вследствие нарушений центральной нервной системы.
Задачей изобретения является создание способа и устройства для реабилитации больных с нарушениями мышечной, нервной и двигательной координации вследствие поражения центральной нервной системы (в частности, больных ДЦП, перенесших инсульт), обеспечивающего восстановление двигательных стереотипов, компенсацию нарушенных отделов мозга образованием новых функциональных межнейронных связей со здоровыми участками, улучшение мышечной, нервной и двигательной координации, снятие спастики мышц, устранение контрактур, ликвидацию спаек между мышечными волокнами больных ДЦП, больных с нарушением нервной и мышечной координации в результате травмы, инсульта.
Указанный результат достигается тем, что в способе реабилитации нервной, мышечной и двигательной координации больных с нарушениями центральной нервной системы, при котором осуществляют воздействие на напряженные мышцы периодической нагрузкой, вызывающей сокращение и растяжение мышечных волокон выбранной группы мышц в направлении их естественного растяжения и сокращения, в соответствии с изобретением определяют начальное положение выбранной части тела, в которой пациент может развить максимальное мышечное усилие в статическом состоянии, выбирают направление приложения периодической нагрузки к выбранной части тела, как соответствующее максимальному сопротивлению приложенной периодической нагрузке, а периодическую нагрузку прикладывают к выбранной части тела с напряженными мышцами в указанном выбранном направлении и при этом перемещают периодическую нагрузку в пространстве при непрерывном контакте с выбранной частью тела пациента относительно упомянутого начального положения, причем в области пространства, в котором пациент не может осуществить движение вследствие нарушений центральной нервной системы, смещение периодической нагрузки вместе с выбранной частью тела осуществляют принудительно.
При этом частоту периодической нагрузки предпочтительно выбирают в диапазоне зубчатого тетануса напряженных мышц от 10 до 60 Гц или в диапазоне гладкого тетануса напряженных мышц от 60 до 300 Гц.
Кроме того, пациент может быть помещен на подвижной платформе для изменения пространственного положения тела пациента в целом путем качания или поворота подвижной платформы при приложении периодической нагрузки.
Указанный технический результат достигается также тем, что в способе реабилитации нервной, мышечной и двигательной координации больных с нарушениями центральной нервной системы, в соответствии с изобретением, предварительно растягивают в направлении вдоль оси позвоночника мышцы спины и живота пациента и осуществляют воздействие периодической нагрузкой на напряженные мышцы спины или живота в направлении, перпендикулярном позвоночному столбу в выбранной области спины между крестцом и среднегрудным отделом позвоночника, при приложении давления в точке воздействия периодической нагрузкой.
Кроме того, указанный технический результат достигается тем, что в устройстве для реабилитации нервной, мышечной и двигательной координации больных с нарушениями центральной нервной системы и содержащем основание, вибратор, снабженный вибронасадкой и соединенный с блоком управления частотой вибрации, в соответствии с изобретением, вибратор связан с рычагом, соединенным с основанием с помощью по меньшей мере одного подвижного сочленения, позволяющего смещать вибратор с заданным усилием по меньшей мере в одной плоскости в выбранном направлении.
Устройство также может содержать второй рычаг, одним концом связанный с упомянутым подвижным сочленением, а вторым концом посредством второго подвижного сочленения связанный с основанием, при этом первое и второе подвижные сочленения обеспечивают смещение вибратора в пространстве по меньшей мере в двух плоскостях.
Вибратор также может быть связан с первым рычагом дополнительно с помощью третьего подвижного сочленения.
При этом устройство предпочтительно содержит по меньшей мере один силовой элемент, связанный с элементами устройства, примыкающими к соответствующему подвижному сочленению, при этом упомянутый по меньшей мере один силовой элемент и соответствующее подвижное сочленение выполнены таким образом, что обеспечивают заданное смещение с заданным усилием соответствующего элемента устройства, примыкающего к упомянутому подвижному сочленению.
Кроме того, вибратор и первый рычаг, первый рычаг и второй рычаг, а также второй рычаг и основание дополнительно связаны между собой силовыми элементами, при этом подвижные сочленения и силовые элементы выполнены таким образом, что обеспечивают смещение вибратора в пространстве с заданным усилием при выбранном направлении возвратно-поступательного или колебательно-вращательного перемещения относительно его начального положения.
По меньшей мере один силовой элемент может быть выполнен в виде цилиндра, заполненного жидкостью, внутри которого размещен поршень, причем надпоршневая и подпоршневая полости цилиндра связаны каналом для перетекания жидкости с регулируемым сечением, обеспечивающим необходимое усилие по перекачке жидкости при перемещении поршня, при этом шток поршня и цилиндр связаны соответственно с элементами устройства, примыкающими к соответствующему подвижному сочленению, а канал для перетекания жидкости с регулируемым сечением может быть выполнен в теле поршня.
Кроме того, вибронасадка может быть снабжена захватом в виде кистевого эспандера, содержащего два рычага, соединенных между собой подвижным сочленением и планкой, свободный конец одного рычага жестко связан с вибратором, свободный конец второго рычага связан с вибронасадкой, а оси рычагов перпендикулярны направлению вибрационного смещения вибронасадки.
Устройство может также содержать вибронасадку с колебательно-вращательным вибрационным перемещением.
Кроме того, устройство предпочтительно содержит платформу для размещения пациента, выполненную с возможностью качательных или поворотных перемещений.
Устройство также может содержать стойку с захватами для фиксации вытянутых над головой рук, элемент крепления захватов для фиксации ног, захваты для фиксации ног и силовой элемент для увеличения расстояния между захватами для рук и ног при приложении дополнительного усилия, связанный с захватами для фиксации рук или ног.
Изобретение основывается на следующих теоретических предпосылках.
Ухудшение нервной, мышечной и двигательной активности больных с нарушениями ЦНС связаны с наличием пораженных участков головного и спинного мозга в результате травмы или инсульта, заболевания детским церебральным параличом. У таких больных часть нейронных связей замкнута на пораженный участок, в связи с чем у больных нарушены двигательные стереотипы, снижена или отсутствует способность концентрировать сознание на выполнении определенных работ, нервная импульсация мышц осуществляется произвольным образом, в связи с чем больной может выполнять хаотичные непредсказуемые движения, как, например, при гиперкинезе, или посылкой постоянных сигналов к мышцам, что приводит к их спазмированию. Связанные с этим нарушения двигательной активности увеличивают степень формирования неправильных функциональных связей. У детей после окончания периода формирования межнейронных связей мозг "закрывается" для перестройки.
Тем не менее, под воздействием вибрации, когда вибрационное воздействие прикладывается к большой группе мышц-синергистов, заставляя их сокращаться в естественном режиме, мозг принудительно получает полную объемную картину положения работающих мышц тела, так как в процессе биомеханической стимуляции происходит раздражение всех рецепторов тела (кожных, мышечных, давления, температурных, слуховых, зрительных и т.д.), причем преимущественно раздражение проприоцепторов, связанных с удлинением, сокращением и ротацией мышечных волокон в их правильном, естественном режиме. А так как стимуляция производится при максимальном напряжении мышц, эти сигналы превалируют над сигналами от всех других внешних раздражителей, подавляют фоновые сигналы. Происходят эффективная суммация и анализ нервных импульсов, поступающих в двигательный нервный центр от всех рецепторных зон. Интенсивное возбуждение всех рецепторов, включая рецепторы, реагирующие на максимальное раздражение, обеспечивает облегчение проведения и окклюзии нервных импульсов, соответствующих правильному движению. Кроме того, вследствие преимущественной усталости наиболее напряженных мышечных волокон, в работу включаются волокна, в обычной ситуации не работающие. Импульсация от них является новой для мозга, и в результате включаются новые межнейронные связи. Далее, так как в процессе стимуляции в результате анализа и суммации вынужденно обеспечивается прямая и обратная импульсация, соответствующая правильной работе мышц, которую обеспечить пораженный участок мозга не в состоянии, происходит компенсация здоровыми участками мозга пораженных за счет включения резервных функциональных межнейронных связей. Постепенно, по мере проведения сеансов стимуляции, происходит процесс выработки правильных рефлексов, и новые функциональные связи от здоровых участков мозга все более и более компенсируют пораженный участок. Максимальная эффективность достигается при совпадении частоты вибрации или ее гармоник с собственной частотой вибрации напряженных мышц, а также при максимальном напряжении всех мышц тела, при этом вибрационное воздействие захватывает максимальный мышечный объем. Оптимум здесь достигается, если частота вибрации лежит в полосе частот, соответствующих зубчатому тетанусу напряженных мышц.
Второй механизм, способствующий образованию новых связей, связан с тем, что в процессе интенсивной физической нагрузки активируется эндокринная система, естественным путем происходит повышенное образование эндорфинов, что соответствует механизму реабилитации, реализующемуся при микрообкалывании нервных узлов церебролизином, но более эффективному, так как при точной топологической привязке воздействия эндорфина во время движения и мышечного напряжения в мозг поступает более эффективная афферентация от рецепторов тела.
Третий механизм, способствующий восстановлению нервной и мышечной активности, заключается в том, что под воздействием интенсивной работы и соответствующей усталости подвергаемых биомеханической стимуляции мышц, выработке эндорфина, снижающего болевой барьер, становится возможным увеличить амплитуду движений, невозможную без такой стимуляции. Усталость и скоординированная работа всех мышц приводит к уменьшению "мышечной памяти" патологии, которая после восстановления обычно заставляет мышцу принять привычное среднее положение. Появляется новое "среднее положение" увеличенной объемной амплитуды движений, определенное, с одной стороны, расслаблением всего комплекса - мышц, кожи, разрывом спаек и ликвидацией контрактур, а с другой стороны, сформированной в мозгу новой картиной возможных разрешенных движений. Максимальная усталость мышц, находящихся в спастике, достигается, если частота вибрации лежит в полосе гладкого тетануса напряженных мышц.
Четвертый механизм связан с раздражением сухожильных рецепторов, которые обычно включаются при очень большой нагрузке. Это в свою очередь раздражает надкостницу, что подобно склеромерному массажу и реализуется преимущественно при частотах вибрации более 100 Гц.
В процессе интенсивной тренировки нервного двигательного центра формируется доминантный очаг возбуждения, функциональные связи, соответствующие правильному движению.
При спастике определенных групп мышц соответствующие им антагонисты пребывают в бездействии, ослабляются и постепенно атрофируются. Кроме того, если спастические или ослабленные мышцы проходят через соответствующие проекционные зоны внутренних органов, то одновременно ослабляются и они. При терапии, одновременно с расслаблением находящихся в спастике мышц, усиливаются ранее не работавшие антагонисты. Благодаря восстановлению кровообращения проталкиванием крови через капилляры работающими мышцами восстанавливается нормальный химический состав в районе мышечных рецепторов, что позволяет восстановить их нормальную работу.
Изобретение поясняется на примерах его осуществления, иллюстрируемых чертежами, на которых представлено следующее:
фиг. 1 - схематичное представление первого варианта осуществления устройства, соответствующего изобретению;
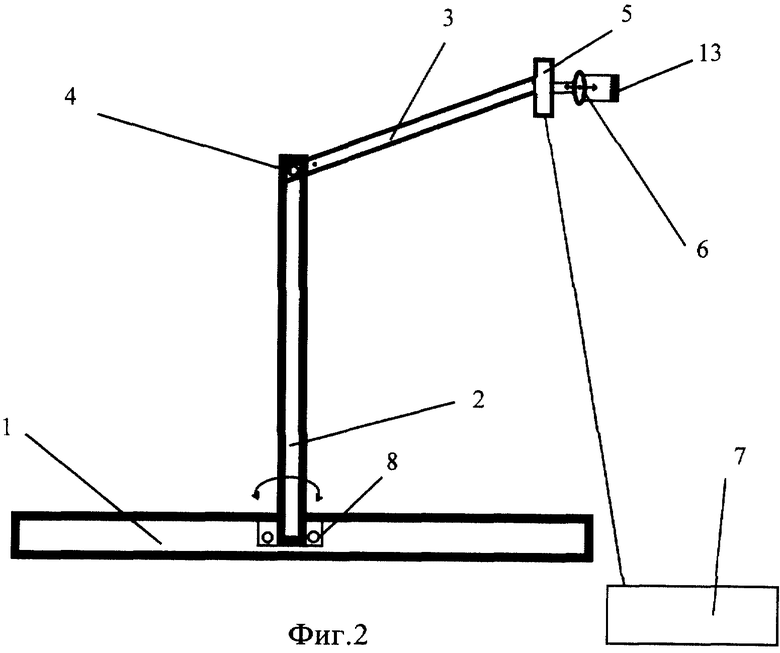
фиг. 2 - схематичное представление второго варианта осуществления устройства, соответствующего изобретению;
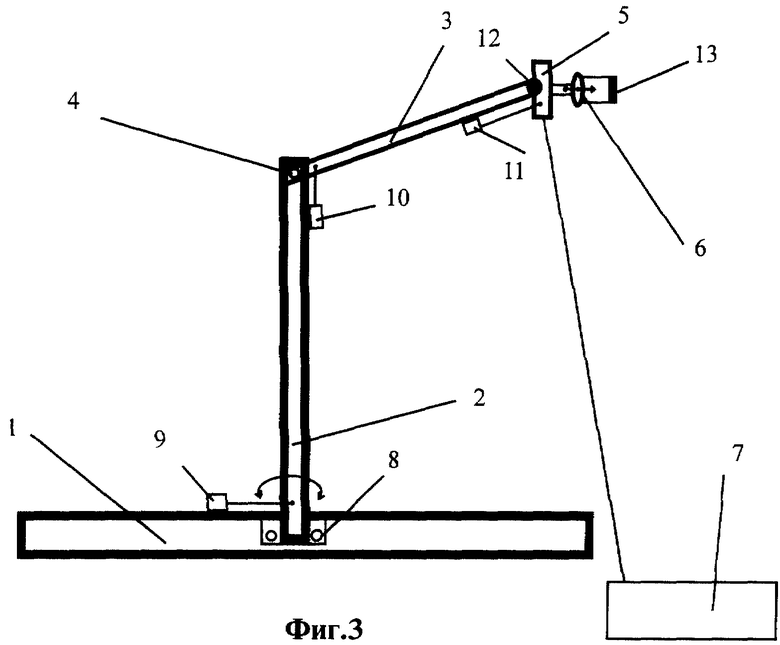
фиг. 3 - схематичное представление третьего варианта осуществления устройства, соответствующего изобретению;
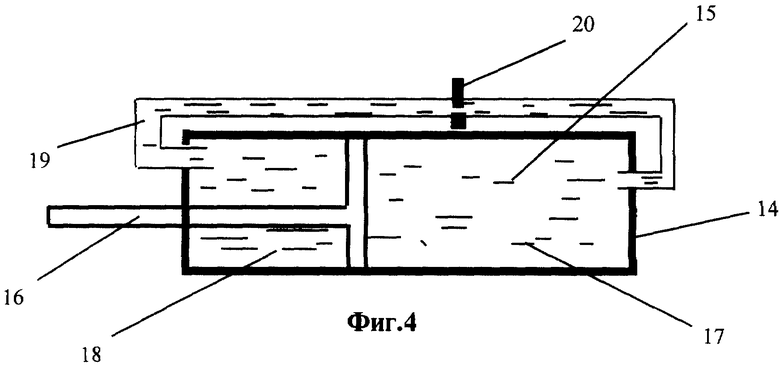
фиг. 4 - упрощенный вид силового элемента, который может быть использован в устройстве по фиг. 3;
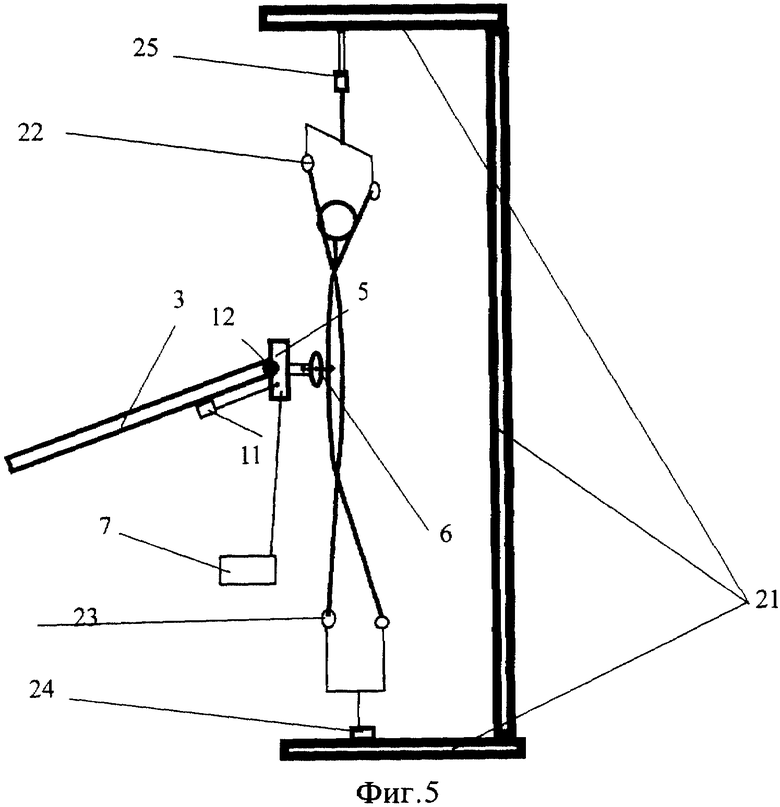
фиг. 5 - схематичное представление четвертого варианта осуществления устройства, соответствующего изобретению;
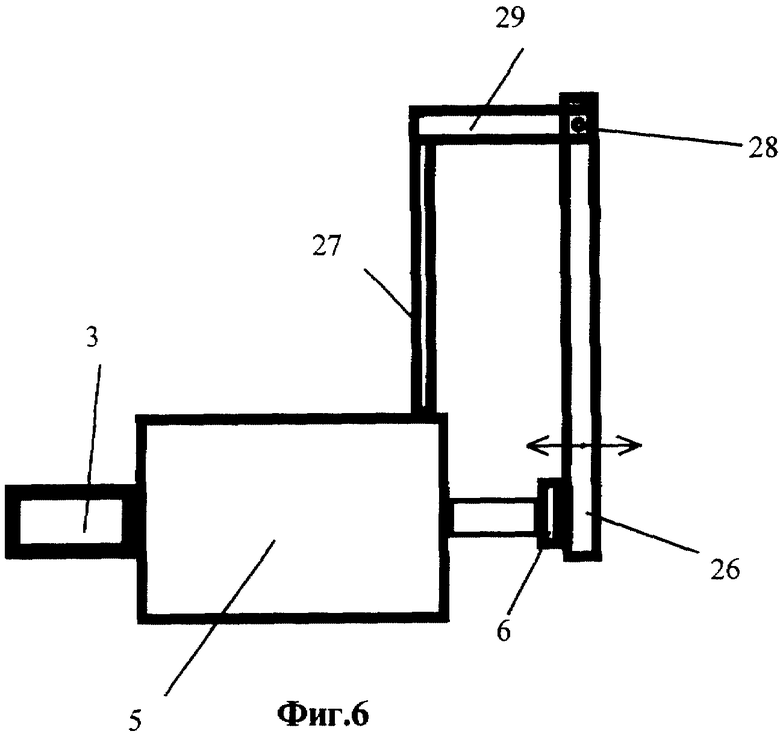
фиг. 6 - схематичное представление захвата в виде кистевого эспандера, который может быть использован в устройстве по фиг. 1-3;
фиг. 7 - схематичное представление последовательности операций при осуществлении способа, соответствующего изобретению.
Устройство реабилитации больных с нарушениями центральной нервной системы, показанное на фиг. 1 и выполненное согласно одному из возможных вариантов осуществления изобретения, содержит основание 1, которое может иметь опору 2, как показано на фиг. 1, соединенную с основанием 1, и рычаг 3, связанный посредством шарнира 4 с опорой 2. На свободном конце рычага 3 установлен вибратор 5 с вибрирующей насадкой 6, связанный с блоком управления 7 частотой вибрации. В зависимости от конструкции вибратора блок управления 7 частотой вибрации может быть выполнен в виде средства электронного управления частотой вращения электродвигателя вибратора, частотой работы электромагнитного вибратора, компрессора регулируемой частоты в случае пневматического или гидравлического вибратора.
Устройство, представленное на фиг. 2, выполненное согласно второму варианту осуществления изобретения, содержит в основном те же структурные элементы, что и устройство по фиг. 1. Отличие варианта осуществления по фиг. 2 состоит в том, что опора 2 выполнена в виде второго рычага 2, установленного на основании 1 с возможностью поворота с помощью подвижного сочленения 8.
Устройство, представленное на фиг. 3, выполненное согласно третьему варианту осуществления изобретения, содержит, помимо элементов 1-8, показанных на фиг. 1 и 2, силовые элементы 9, 10, 11, при этом первый силовой элемент 9 связан с элементами устройства - основанием 1 и вторым поворотным рычагом 2, второй силовой элемент 10 связан с элементами устройства - первым и вторым шарнирно-связанными рычагами 3, 2 и третий силовой элемент 11 связан с элементами устройства - первым рычагом 3 и вибратором 5, которые также связаны между собой двухкоординатным шарниром 12. В данном варианте вибрирующая насадка 6 снабжена захватом 13.
Силовые элементы 9, 10, 11 могут быть выполнены, как показано на фиг. 4. В показанном на фиг. 4 варианте силовой элемент содержит цилиндр 14, заполненный жидкостью или воздухом 15, поршень 16, причем надпоршневая 17 и подпоршневая 18 полости цилиндра 14 связаны каналом 19 с устройством регулировки 20 сечения канала. Силовые элементы обеспечивают необходимое усилие при смещении вибратора в пространстве и могут быть выполнены также в виде пружины, фрикционного механизма, электродвигателя.
Устройство, представленное на фиг. 5, выполненное согласно четвертому варианту осуществления изобретения, помимо элементов, показанных на фиг. 1, содержит стойку 21, захваты для фиксации рук 22 захваты для фиксации ног 23, крепление 24, а также силовой элемент 25, соединенный со стойкой 21. В других вариантах силовой элемент может быть соединен с захватами для фиксации ног.
На фиг. 6 показан вариант выполнения захвата 13 в виде кистевого эспандера, имеющего подвижный рычаг 26, ось которого перпендикулярна направлению возвратно-поступательного движения вибрирующей насадки, и неподвижный рычаг 27. Рычаги соединены между собой планкой 28 и шарнирным соединением 29. Свободный конец подвижного рычага 26 соединен с вибрирующей насадкой 6, а свободный конец неподвижного рычага 27 закреплен неподвижно на вибраторе 5, причем рычаги 26 и 27 расположены относительно друг другу на расстоянии, когда пациент способен охватить оба рычага пальцами. Другим вариантом захвата может быть также захват для фиксации к вибронасадке 6 части тела пациента, выбранной для проведения процедуры. В простейшем виде это может быть фиксирующий ремень или ручка для обхвата ее пальцами, прикрепленная либо жестко, либо с помощью гибкой нерастяжимой тяги к вибронасадке 6.
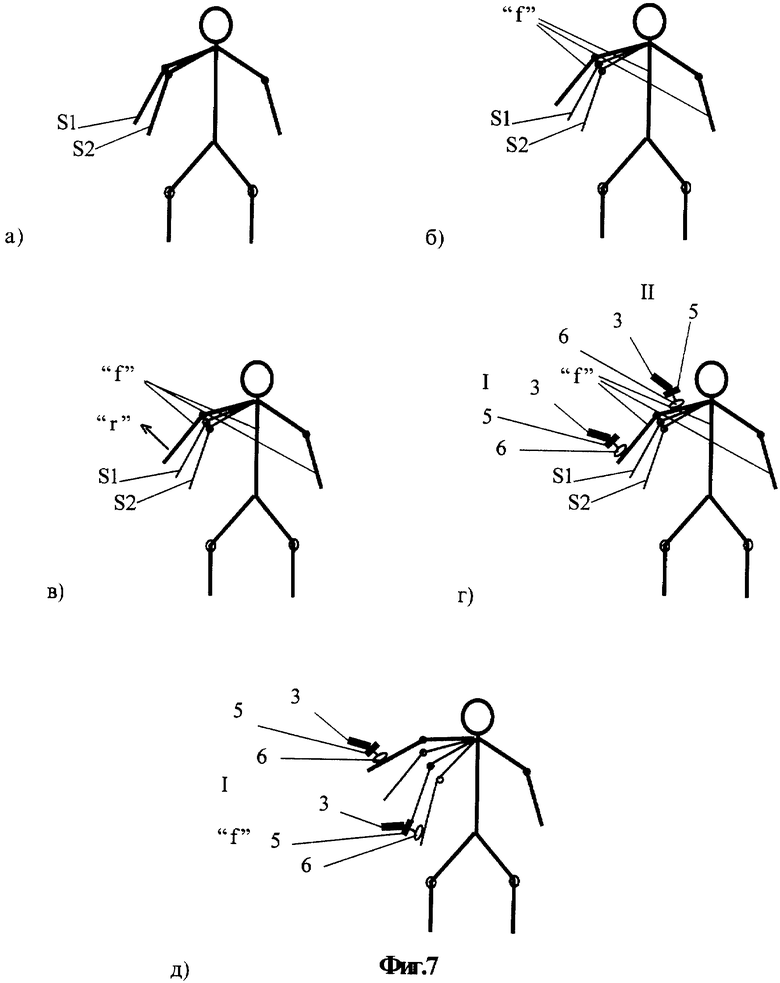
Последовательность операций способа, соответствующего изобретению, иллюстрируется с помощью диаграмм на фиг. 7 (а-г) на примере с нарушением двигательной активности руки пациента и включает следующие этапы:
1 - определяют область пространства, в которой движения невозможны или ограничены из-за нарушения центральной нервной системы. В данном случае это область между положениями "S1" "S2" руки пациента (фиг. 7а);
2 - выбирают положение тренируемой конечности, в которой пациент способен развить в статике максимальное мышечное усилие без смещения ее в пространстве (пространственное положение "f" тела и подвергаемой процедуре конечности, фиг. 7б). Выбранное положение "f" тела максимально приближено к зоне ограничения движений конечности, обусловленной нарушениями центральной нервной системы;
3 - определяют направление "г" смещения конечности из положения "f", в котором пациент может оказать максимальное сопротивление принудительному смещению конечности (фиг. 7в);
4 - выбирают область конечности, к которой будет приложена вибрирующая нагрузка (I или II на фиг. 7г);
5 - прикладывают вибрирующую насадку вибратора к выбранной области конечности, расположенной в положении "f", при направлении возвратно-поступательного вибрационного движения вибрирующей насадки в направлении, параллельном к направлению "г";
6 - проводят процедуру вибрационного воздействия, смещая вибратор относительно положения "f" при максимальном или близком к максимальному напряжении пациентом всех мышц тела (фиг. 6д) как в области пространства, где пациент может выполнять движения, так и в области пространства между положениями S1 и S2, в которой самостоятельные движения затруднены или невозможны вследствие нарушений ЦНС.
Ниже со ссылками на фиг. 1-7 на конкретных примерах будет описана работа устройства для реабилитации больных с нарушениями центральной нервной системы, соответствующего изобретению.
Предположим, что у пациента нарушена двигательная активность руки, спазмированы мышцы предплечья, в связи с чем рука находится в полусогнутом или согнутом положении, имеется контрактура локтевого сустава. Насадку вибратора 6 (фиг. 1) приводят в контакт с запястьем, плотно прикрепляют его захватом 13 (фиг. 3) при таком положении руки в пространстве, когда пациент в состоянии напрячь по возможности все мышцы тела и, в первую очередь, тренируемой руки (положение "f" на фиг. 7б). Пациент максимально напрягает все мышцы тела. После этого включают вибратор 5 с частотой вибрации 17-20 Гц и, преодолевая сопротивление напряженной руки, с помощью оператора или электромотора силового элемента 9 (фиг. 3) смещают вибратор 5 в направлении, противоположном тому, в котором пациент может осуществить противодействие (направление, обратное "г" на фиг. 7в). Далее направление смещения вибратора 5 меняют на обратное, при этом пациент также противодействует смещению. Приложенная периодическая нагрузка вызывает вибрационное смещение с амплитудой вибрации скелетной кости или костей части тела, на которую оказывается воздействие, что в свою очередь посредством прикрепленных к данной кости или костям сухожилиям приводит к соответствующему сокращению или растяжению мышечных волокон всех мышц-синергистов, принимающих участие в таком движении. Одновременно осуществляется макросмещение данной части тела. В процессе процедуры меняют частоту вибрации, определяя резонансную частоту напряженных мышц по собственным ощущениям разливающейся по руке теплоты у пациента. Если определить резонансную частоту таким образом невозможно, воздействие осуществляют с частотой вибрации 17-20 Гц зубчатого тетануса напряженных мышц. Постепенно увеличивают амплитуду смещения вибратора 5 относительно начального положения, включая круговые движения рукой относительно начального положения. Также пациент, если он в состоянии это выполнить, самостоятельно смещает вибратор относительно начального положения, а оператор, либо с помощью силовых элементов 9, 10, 11, либо удерживая вибратор 5 руками, задает усилие, которое при таком смещении преодолевает пациент. Направление возвратно-поступательного вибрационного смещения вибрирующей насадки 6 выбирают преимущественно совпадающим с направлением, в котором пациент развивает противодействующее усилие (т.е. в направлении "г" фиг. 7). Амплитуду возвратно-поступательного движения вибрирующей насадки 6 выбирают в пределах 4-8 мм. Время процедуры определяется начальным состоянием пациента и лежит в пределах 15-300 с.
В результате указанных процедур уменьшается спастика мышц, полностью или частично устраняется контрактура, увеличивается полная амплитуда движений руки.
Для расслабления спазмированных мышц руки используют также вибрирующую насадку 6, совершающую вибрационное вращательно-колебательное движение. Пациент зажимает захват 13 насадки сжатыми в кулак пальцами. Выбирают положение вибратора 5 и вибронасадки 6 таким образом, чтобы ось, вокруг которой совершается колебательное движение насадки, совпадала с осью лучезапястной кости руки.
При очередной процедуре подключают новые движения в пределах движений здорового человека. Время воздействия на конечность от 15 с до нескольких минут в зависимости от возможностей пациента. Процедуры проводят ежедневно, один раз в день сериями в 5-10 дней. После этого делают перерыв от одного до шести месяцев. После перерыва проводят очередную серию.
Для расслабления и реабилитации мышц предплечья и плечевого пояса насадку 6 вибратора 5 закрепляют на предплечье вблизи локтевого сустава или на локоть согнутой руки на наружной или внутренней поверхности, в зависимости от направления смещения напряженной руки.
Для восстановления работоспособности мышц плечевого пояса, шейных мышц, снятия контрактур в плечевом суставе насадку 6 вибратора 5 прижимают к руке в районе плечевого сустава, а согнутую в локтевом суставе или выпрямленную руку смещают вокруг плечевого сустава. Смещение под действием вибрации плеча будет вызывать вибрационное сокращение мышц плечевого пояса и шейных мышц.
Расслабление и восстановление мышц спины проводят следующим образом. Пациент закрепляет руки в захватах 22 (фиг. 5), укрепленных на стойке 21 и висит, не касаясь ногами пола. На ноги тренируемого укрепляют захваты для фиксации ног 23, прикрепленные к полу или стойке элементом крепления 24, и с помощью силового элемента 25 растягивают тело вдоль продольной оси, растягивая таким образом мышцы живота и спины. Пациент напрягает все мышцы тела, а вибронасадку 6 включенного вибратора 5 (фиг. 1) подводят к позвоночнику и давят ним в направлении, перпендикулярном позвоночнику в течение 15-40 с. Область массирования от крестца до среднегрудного отдела. Под давление вибратора тело должно слегка прогнуться.
В данном случае растянутые мышцы спины подобны закрепленной на концах струны. Небольшое усилие в области между точками закрепления, направленное перпендикулярно струне, вызывает растяжение струны. То же самое происходит и с мышечными волокнами спинных мышц. Приложенное вибрационное воздействие к предварительно растянутым мышцам приводит не сдавливанию их, несмотря на то, что воздействие осуществляется не вдоль мышечных волокон, а поперек, а к дополнительному вибрационному растягиванию.
Аналогично проводят сеанс с мышцами живота.
Для реабилитации двигательной активности мышц пальцев и связанных с ними синергистов используют вибронасадку 6 вибратора 5, которая снабжена захватом 13 в виде кистевого эспандера (фиг. 6). Пациент охватывает рычаги пальцами руки и при включенном вибраторе 5 совершает рукой движения в возможно большем объеме и амплитуде, сгибая и разгибая руку, а также выполняет колебательно-вращательные движения вокруг оси, проходящей вдоль костей предплечья и плечевой кости, если рука выпрямлена. При этом пальцы пациента колеблются с частотой вибрации. Через связанные с пальцами сухожилия воздействие передается к мышцам руки и плеча.
Тренировки мышц ног аналогичны тренировкам мышц на руках. Насадку 6 вибратора 5 закрепляют в районе коленного сустава, тыльной или боковой поверхности пятки, упирают в подошву стопы или лодыжку. Все манипуляции с включенным вибратором проводят с максимально возможным напряжением всех мышц тела, а направление смещения вибратора и поступательно-возвратного вибрационного движения насадки 6 вибратора 5 должно совпадать с разрешенными направлениями движения конечности здорового человека, т.е., чтобы кости под воздействием вибрации совершали вращательные движения в суставах. Следует избегать продольного смещении костей под воздействием вибрации. Например, при давлении на напряженную ногу под пятку и вибрационном воздействии вдоль ноги кости в суставах будут ударяться друг о друга и можно серьезно повредить сустав. Т. е. воздействие возвратно-поступательного движения насадки вибратора вдоль кости противопоказано.
При использовании захвата с возможностью вращательно-колебательного перемещения его выполняют в виде лыжного крепления, ботинка или крепят ногу ремнями таким образом, чтобы под действием вибрации нога совершала колебательное движение вокруг оси, проходящей через пятку и колено.
Для формирования более полной картины, формирующейся в мозгу, пациента во время вибрационного воздействия ставят на качающуюся или вращающуюся платформу. Динамическое изменение положения в пространстве тела, как целого, приводит а раздражению вестибулярного аппарата и увеличивает объем информации, поступающей в мозг.
Дальнейшее повышение эффективности может быть достигнуто при практическом использовании устройства по третьему варианту, иллюстрированному на фиг. 3, с введением дополнительных рычагов, подвижных сочленений, силовых элементов, когда рычаги устройства соответствуют основным частям скелета пациента, подвижные сочленения соответствуют основным суставам, а силовые элементы - аналогам скелетных мышц. Например, первое подвижное сочленение находится на уровне поясницы, второе - на уровне колена. Вибратор закрепляют на рычаге на уровне выбранной для закрепления области тела. Например, на уровне пятки. Рычаги фиксируют к конечностям. В этом случае устройство позволяет выполнять любые движения при приложении периодической нагрузки, т.е. поднимать, опускать, отводить в сторону, сгибать ногу, наклонять корпус. Силовые элементы при этом устанавливают усилие, которое при таких движениях преодолевает пациент.
Изобретение относится к области медицины и предназначено для реабилитации нервной, мышечной двигательной координации больных с поражениями центральной нервной системы (ЦНС) и может быть использовано для улучшения нервной, мышечной и двигательной активности, снятия контрактур и спастики мышц, восстановления кровообращения, для расслабления и восстановления перед проведением сеансов мануальной терапии. Способ основан на воздействии на напряженные мышцы вибрацией, вызывающей сокращение и растяжение мышечных волокон выбранной группы мышц в направлении их естественного растяжения и сокращения. Определяют начальное положение выбранной конечности, в котором пациент способен развить в статике максимальное мышечное усилие, выбирают направление приложения вибрации, противоположное тому, в котором пациент может оказать максимальное противодействие приложенному воздействию, прикладывают вибрацию к суставам или костям конечности, на которую оказывают воздействие, и при непрерывном контакте вибратора с выбранным местом воздействия смещают конечность в выбранном направлении. Устройство содержит основание, силовой элемент, вибратор с вибронасадкой, соединенный с блоком управления частотой вибраций и связанный с рычагом, соединенным с основанием с помощью подвижного сочленения, позволяющего смещать вибратор по меньшей мере в одной плоскости и в одном направлении. Силовой элемент связан с элементами устройства, примыкающими к подвижному сочленению, при этом силовой элемент и подвижное сочленение выполнены с возможностью обеспечения заданного смещения с заданным усилием соответствующего элемента устройства, примыкающего к подвижному сочленению. 2 с. и 9 з.п. ф-лы, 7 ил.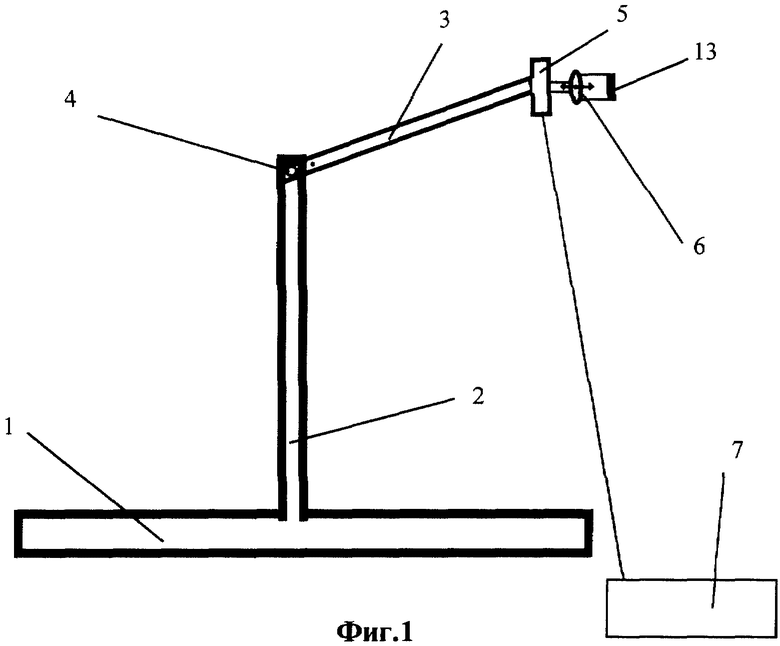
| Трапезникова Н.К | |||
| О некоторых новых методах вибротерапии, Юбил | |||
| сб | |||
| научных трудов | |||
| - Томск, 1992 | |||
| Креймер А.Я | |||
| Низкочастотная вибротерапия, Сб | |||
| Научных трудов | |||
| - Томск, 1990 | |||
| Устройство для массажа | 1986 |
|
SU1456152A1 |
| Белова Г.И | |||
| и др | |||
| Применение продольной вибрации мышц в сочетании с методом нормализации рефлекса на растяжение в комплексном лечении детей с церебральными параличами | |||
| Всесоюзная научно-практич | |||
| конференция по детской неврологии и терапии | |||
| -Вильнюс, 1989 | |||
| Устройство для самомассажа | 1977 |
|
SU660682A1 |
| Вибрационное устройство | 1983 |
|
SU1127588A1 |
| Устройство для звуковой стимуляции внутренних органов | 1983 |
|
SU1179994A1 |
