Изобретение относится к медицинской технике и может быть использовано в учреждениях практического здравоохранения, санаторно-курортных учреждениях, реабилитационных медицинских центрах.
Актуальность изобретения состоит в широком распространении травм и заболеваний нервно-мышечной и опорно-двигательной систем, прежде всего с повреждением спинного и головного мозга, приводящих к нарушению бипедальной локомоции (двуногой ходьбы), для восстановления которой его применение эффективно.
Актуальность изобретения состоит также в высокой социальной значимости восстановления бипедальной локомоции инвалидов, неврологического, нейрохирургического и травматолого-ортопедического профилей.
Известно устройство (Патент №203836 от 09.10.1967) для обучения ходьбе больных с резким нарушением двигательных функций нижних конечностей с определением степени нагрузки больного на конечности в процессе ходьбы, состоящее из основания жестко соединенного с изогнутыми стойками, на которых укреплены поручни, оно оснащено также поперечной балкой с подвижной коляской в виде подвесной системы, шнуром и блоком с крюком. С целью определения степени нагрузки на конечности в процессе ходьбы в основание вмонтированы медицинские весы. Недостатком этого устройства является использование устаревшей системы определения степени нагрузки больного на конечности посредством вмонтированных медицинских весов и жестко фиксированного настила для ходьбы.
Наиболее близким по технической сущности к предлагаемому устройству является тренажер "бегущая дорожка" (Патент №2131283 от 10.06.1999), содержащий подвижную ленту и удерживающие средства для пользователя, с помощью которых вес его тела может быть частично уравновешен. К недостаткам этого тренажера относиться тот факт, что при вертикализации пациента невозможно выполнение пассивных движений парализованными конечностями, что делает невозможным реабилитацию пациентов с повреждением спинного мозга и головного мозга, а также невозможно выполнение парализованными конечностями ритмичных поступательно-возвратных движений с одновременной электростимуляцией мышц.
Техническим результатом предлагаемого устройства для восстановления двигательной активности пациентов с повреждением спинного и головного мозга является улучшение результатов и сокращение сроков реабилитации пациентов с травмами спинного и головного мозга, ранняя адаптация к ортостатическому статусу и к нагрузкам за счет применения редукторно-экцентрической системы, которая обеспечивает последовательность в поступательно-возвратных движениях металлических штанг, а также закрепленного на металлической раме шестиканального электростимулятора, позволяющего проводить синхронизированную с работой двигателя электростимуляцию трех групп мышц на каждой конечности, участвующей в акте моделированного движения.
Указанный технический результат достигается тем, что устройство для восстановления двигательной активности пациентов с повреждением спинного и головного мозга состоит из металлической неподвижной рамы, на которой посредством вращающихся узловых механизмов на шарикоподшипниках закреплены две подвижные металлические штанги, в верхней части выполнены в виде ручек, а в нижней части на них закреплены тутора, фиксирующие коленные суставы и площадки для стоп; для установления пациента в вертикальную позицию используется механический редуктор; степень нагрузки на конечности контролируется динамометром, закрепленным на тросе; на металлической раме также располагается двигатель, соединенный с двумя подвижными металлическими штангами в их нижней части через редукторно-экцентрическую систему; программно задаваемый алгоритм поступательно-возвратных движений конечностей в горизонтальной плоскости обеспечивается электронным преобразователем и компьютером; при помощи шестиканального электростимулятора производится стимуляция трех групп мышц на каждой конечности, участвующей в акте моделированного движения; три канала на одной конечности работают в противофазу с тремя каналами другой конечности; пьезодатчики, установленные на площадках для стоп, программно синхронизируют работу двигателя и электростимулятора.
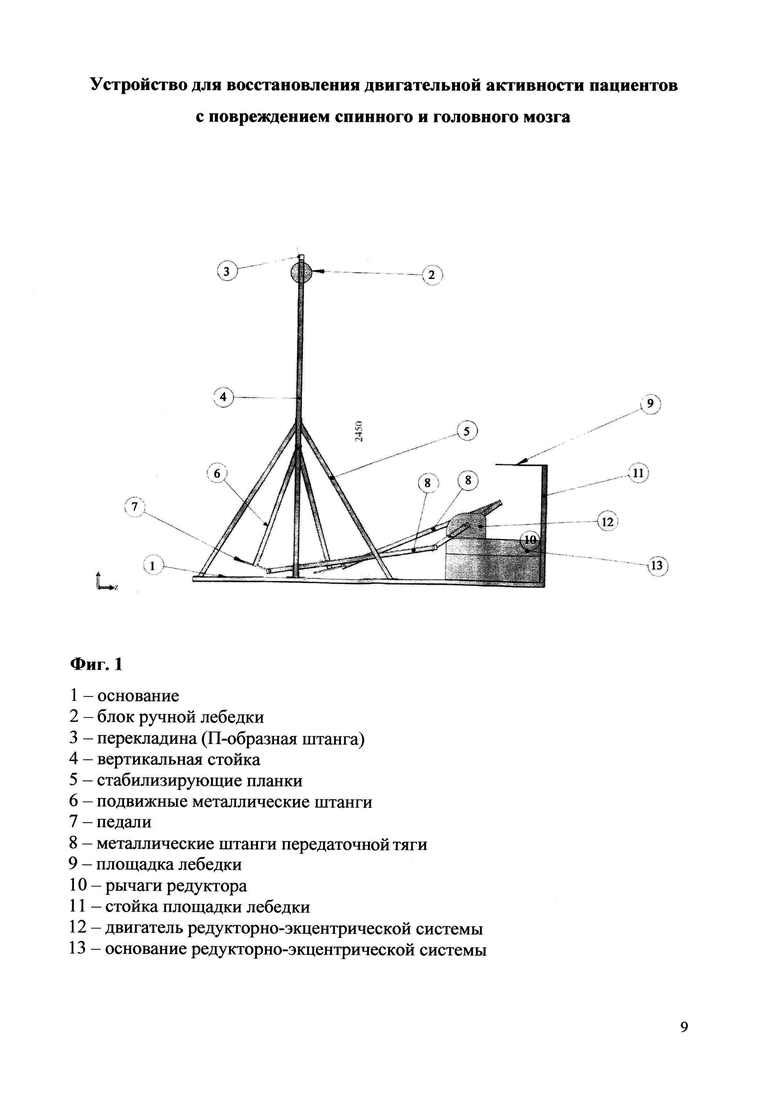
Описание устройства для восстановления двигательной активности пациентов с повреждением спинного и головного мозга.
Устройство состоит из металлической неподвижной рамы, в составе которой основание (1), стабилизирующие планки (5) и вертикальная стойка (4), в средней трети которой посредством вращающихся узловых механизмов на шарикоподшипниках прикреплены две подвижные металлические штанги (6), при этом в нижней части штанг имеются площадки для стоп в форме педалей (7) со встроенными пьезодатчиками, на которые устанавливаются стопы пациента и закрепляются ремнями для фиксации; в средней части штанг (6) закреплены съемные фиксирующие коленные суставы тутора, в верхние части штанг встроены упоры в виде ручек, куда фиксируются ремнями кисти пациента; на металлической раме (1) на основании (13) располагается двигатель редукторно-экцентрической системы (12), соединенный ручками (10) с двумя подвижными металлическими штангами передаточной тяги (8), крепящимися к педалям (7); в верхней части металлической рамы на стойке (4) закреплена неподвижная металлическая П-образная штанга (3) с вращающимся роликовым блоком ручной лебедки (2), на которой расположена подвесная система, состоящая из сиденья выполненного виде парашютной подвески и соединенного ремнями с широким поясом, к которой прикреплены четыре металлических троса, соединенных с концами переходной поперечной планки (3), от центра которой через два роликовых блока проходит один металлический трос через площадку (9) к стойке лебедки (11) и далее к механическому редуктору (12) с вращающейся ручкой (10), обеспечивающему плавное дозируемое перемещение подвесной системы в вертикальной плоскости, контролируемое при помощи динамометра, закрепленного на тросе; в свою очередь, на металлической раме (4) также устанавливается шестиканальный электростимулятор, от которого через электроды подается электрическая стимуляция трех групп мышц на каждой конечности, участвующей в акте моделированного движения, при этом три канала на одной конечности работают в противофазу с тремя каналами другой конечности, а синхронизация работы двигателя и электростимулятора осуществляется пьезодатчиками. Сущность предлагаемого устройства поясняется Фиг. 1.
Описание работы устройства для восстановления двигательной активности пациентов с повреждением спинного и головного мозга.
Устройство применяется следующим образом. Пациент закрепляется в подвесной системе. Стопы пациента располагаются на площадках для стоп и фиксируются ремнями. Посредством вращения ручки механического редуктора обеспечивается натяжение металлического троса и четырех тросов, в результате чего пациент устанавливается в вертикальную позицию. Затем производится фиксация коленных суставов пациента туторами и кистей к ручкам при помощи ремней. Затем под контролем динамометра путем вращения ручки редуктора устанавливается необходимая величина облегчения веса тела (величина нагрузки на ноги). В зависимости от возможностей пациента степень натяжения троса, позволяющая регулировать нагрузку веса тела на стопу, может варьироваться от 0 до 100%. Накладываются накожные электроды на ягодичную мышцу (1-канал), на четырехглавую мышцу (2-канал), на икроножную мышцу (3-канал) правой нижней конечности и закрепляются эластичными лентами и аналогично на левую нижнюю конечность, электроды соединяются проводами с шестиканальным электростимулятором и далее с компьютером. Компьютером задается алгоритм синхронного действия электростимуляторов (длительностью электростимуляции мышц каждой ноги составляет 1 с, а работа трех каналов настроена для работы в противофазном режиме по отношению к другим трем каналам на противоположной нижней конечности) и обратно-поступательного движения штанг (с частой движений 60 поступательных движений в 1 мин каждой штанги) в трех комбинациях: полный режим (с использованием электростимулятора и пассивных обратно-поступательных движений); неполный режим (пассивные движения обеспечиваются только электроприводной системой без электростимуляции); простой режим (активные движения осуществляются без электростимуляции при отключенном электродвигателе за счет собственного мышечного усилия конечностей). Длительность процедур составляет по 40 мин (через каждые 10 мин работы больной отдыхал 5 минут) два раза в день.
Предлагаемое устройство для восстановления двигательной активности пациентов с повреждением спинного и головного мозга, применяемое при реабилитации пациентов с повреждением спинного и головного мозга, обеспечивает максимально раннюю физиологическую вертикализацию больного с тонкой дозировкой ортостатической (гравитационной) нагрузки на нижние конечности. Механические движения и одновременная электромиостимуляция способны продуцировать мощный афферентный поток от проприорецепторов мышц и суставов, который активирует регенерацию клеток поврежденного участка спинного мозга и может способствовать восстановлению утраченного двигательного стереотипа двуногой ходьбы. Дозированное изменение ортостатической силы гравитации и сочетание механических движений конечностей с электромиостимуляцией основных антигравитарных мышечных групп на предлагаемом устройстве позволяет значительно сократить сроки реабилитации и подготовить больного к самостоятельному передвижению.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕИНВАЗИВНАЯ ЭЛЕКТРОДНАЯ МАТРИЦА СПИНАЛЬНОГО НЕЙРОПРОТЕЗА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2021 |
|
RU2778009C1 |
| СПОСОБ ЭЛЕКТРОСТИМУЛЯЦИИ СПИННОГО МОЗГА | 2010 |
|
RU2441679C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
| Способ нейросенсорной динамической гимнастики у детей с патологией опорно-двигательного аппарата | 2024 |
|
RU2834819C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2054920C1 |
| СПОСОБ ИНВАЗИВНОЙ ЭЛЕКТРОСТИМУЛЯЦИИ СПИННОГО МОЗГА МОДУЛИРОВАННЫМИ ЭЛЕКТРИЧЕСКИМИ ИМПУЛЬСАМИ | 2016 |
|
RU2618206C1 |
| СПОСОБ ЛЕЧЕНИЯ ПОРАЖЕНИЙ СПИННОГО МОЗГА | 2014 |
|
RU2578860C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
| СПОСОБ МЕДИЦИНСКОЙ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ СО СПАСТИЧЕСКОЙ ПАРАПЛЕГИЕЙ ВСЛЕДСТВИЕ ПОВРЕЖДЕНИЯ СПИННОГО МОЗГА НА ГРУДНОМ И ГРУДО-ПОЯСНИЧНОМ УРОВНЕ | 2023 |
|
RU2821772C1 |
| СПОСОБ АКТИВАЦИИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА | 2012 |
|
RU2505277C1 |
Изобретение относится к медицинской технике и может быть использовано в учреждениях практического здравоохранения, санаторно-курортных учреждениях, реабилитационных медицинских центрах. Устройство для восстановления двигательной активности пациентов с повреждением спинного и головного мозга состоит из металлической рамы на стойке, закрепленной в верхней ее части неподвижной металлической П-образной штанги с вращающимся роликовым блоком ручной лебедки, на которой расположена подвесная система. Подвесная система состоит из сиденья, выполненного виде парашютной подвески и соединенного ремнями с широким поясом, к которой прикреплены четыре металлических троса, соединенных с концами переходной поперечной планки, от центра которой через два роликовых блока проходит один металлический трос через площадку к стойке лебедки и далее к механическому редуктору с вращающейся ручкой. На раме посредством вращающихся узловых механизмов на шарикоподшипниках закреплены две подвижные металлические штанги, в верхней части выполненные в виде ручек, куда фиксируются ремнями кисти пациента, а в средней части на них закреплены тутора фиксирующие коленные суставы и внизу площадки для стоп (педали), механический редуктор для установления пациента в вертикальную позицию, динамометр для контроля степени нагрузки на конечности. На металлической раме на основании также располагается двигатель редукторно-экцентрической системы, соединенный ручками с двумя подвижными металлическими штангами передаточной тяги, крепящимися к педалям. Электронный преобразователь и компьютер обеспечиввают программно задаваемый алгоритм поступательно-возвратных движений конечностей в горизонтальной плоскости. Шестиканальный электростимулятор, при помощи которого производится стимуляция трех групп мышц на каждой конечности, участвует в акте моделированного движения. Три канала на одной конечности работают в противофазу с тремя каналами другой конечности. Пьезодатчики установлены на площадках для стоп, программно синхронизируют работу двигателя и электростимулятора. Изобретение позволяет обеспечить максимально раннюю физиологическую вертикализацию больного с тонкой дозировкой ортостатической (гравитационной) нагрузкой на нижние конечности, улучшить результаты и сократить сроки реабилитации пациентов с травмами спинного и головного мозга и подготовить больного к самостоятельному передвижению на двух ногах. 1 ил.
Устройство для восстановления двигательной активности пациентов с повреждением спинного и головного мозга, состоящее из металлической рамы на стойке, закрепленной в верхней ее части неподвижной металлической П-образной штанги с вращающимся роликовым блоком ручной лебедки, на которой расположена подвесная система, состоящая из сиденья, выполненного виде парашютной подвески и соединенного ремнями с широким поясом, к которой прикреплены четыре металлических троса, соединенных с концами переходной поперечной планки, от центра которой через два роликовых блока проходит один металлический трос через площадку к стойке лебедки и далее к механическому редуктору с вращающейся ручкой, отличающееся тем, что на раме посредством вращающихся узловых механизмов на шарикоподшипниках закреплены две подвижные металлические штанги, в верхней части выполненные в виде ручек, куда фиксируются ремнями кисти пациента, а в средней части на них закреплены тутора, фиксирующие коленные суставы и внизу площадки для стоп (педали); механический редуктор для установления пациента в вертикальную позицию; динамометр для контроля степени нагрузки на конечности; на металлической раме на основании также располагается двигатель редукторно-экцентрической системы, соединенный ручками с двумя подвижными металлическими штангами передаточной тяги, крепящимися к педалям; электронный преобразователь и компьютер, обеспечивающие программно задаваемый алгоритм поступательно-возвратных движений конечностей в горизонтальной плоскости; шестиканальный электростимулятор, при помощи которого производится стимуляция трех групп мышц на каждой конечности, участвующей в акте моделированного движения; три канала на одной конечности работают в противофазу с тремя каналами другой конечности; пьезодатчики, установленные на площадках для стоп, программно синхронизируют работу двигателя и электростимулятора.
| US 5512029 A, 30.04.1996 | |||
| US 5957816 A, 28.09.1999 | |||
| Устройство для разработки суставов нижних конечностей | 1987 |
|
SU1443900A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 7137959 B2, 21.11.2006 | |||
| ПСИХОТЕРАПЕВТИЧЕСКИЙ НЕЙРОКОРРЕКТОР | 2004 |
|
RU2301053C2 |
| Устройство для разработки суставов нижних конечностей | 1990 |
|
SU1722482A1 |

