Изобретение относится к навигации, в частности для измерения скорости подвижных объектов.
Известно устройство для измерения скорости (допплеровские измерители скорости), содержащее антенну, генератор СВЧ-колебаний, направленный ответвитель, циркулятор, модулятор, смеситель, усилитель, вычислитель и индикатор [1]
Наиболее близким к изобретению является устройство, содержащее генератор СВЧ-колебаний, направленный ответвитель, циркулятор, приемопередающую антенну, смеситель, усилитель допплеровского сигнала, измеритель частоты, в которое для повышения точности вновь введены формирователь строб-импульсов в моменты запирания допплеровского сигнала и фазовращатель [2] Данное устройство действительно повышает точность измерения за счет изменения фазы сигнала гетеродина в момент пропадания сигнала (в большинстве известных устройств используется схема запоминания предыдущего сигнала, т.е. они переходят в режим работы "память").
Однако в известных устройствах присутствует погрешность, обусловленная влиянием вибрации антенно-фидерных элементов.
Целью изобретения является уменьшение влияния вышеуказанных помех.
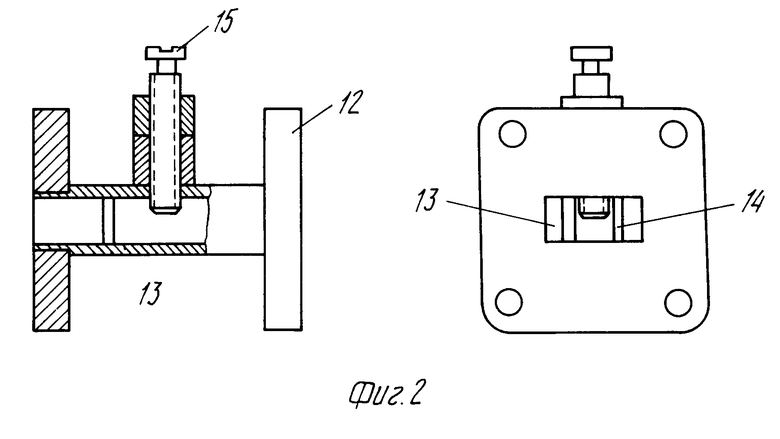
Для этого в измеритель скорости, состоящий из генератора СВЧ-колебаний, циркулятора, приемопередающей антенны, смесителя, усилителя, фазовращателя и измерителя допплеровской частоты, введены СВЧ-фильтр, блок автоматической подстройки зоны генерации и следящий частотно-цифровой преобразователь, два входа которого соединены с двумя выходами измерителя допплеровской частоты, первый вход фазовращателя соединен с выходом смесителя, второй вход соединен с выходом блока автоматической подстройки зоны генерации, а выход соединен с вторым входом измерителя допплеровской частоты, второй вход блока автоматической подстройки зоны регенерации соединен с выходом усилителя, а второй выход с первым входом генератора сверхвысокочастотных колебаний, выход которого соединен с входом сверхвысокочастотного фильтра, а второй вход с выходом модулятора, выход сверхвысокочастотного фильтра соединен с другим плечом циркулятора, а сверхвысокочастотный фильтр выполнен в форме волновода сечением 13х6,5 мм и снабжен двумя индуктивными штыревыми решетками и подстроечным винтом посередине.
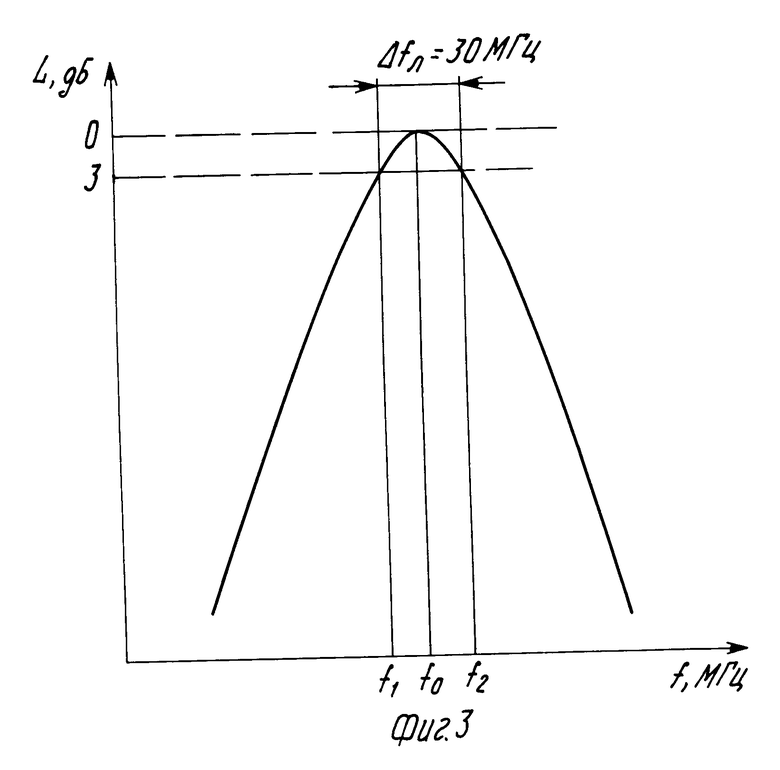
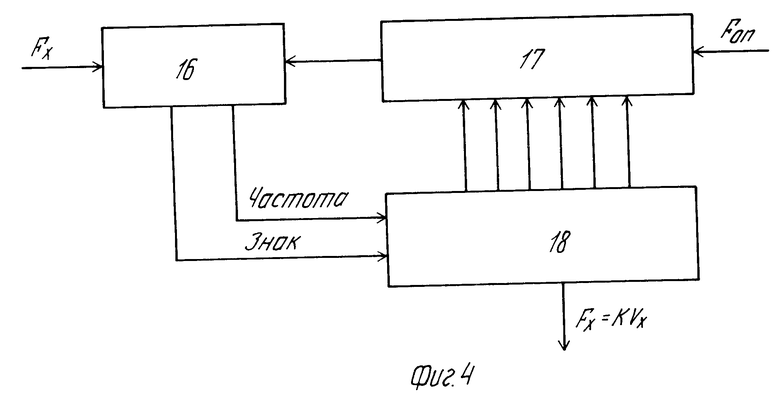
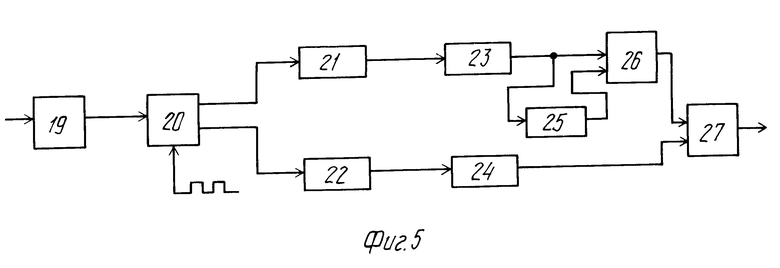
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 и 3 сверхвысокочастотный фильтр, две проекции и, и его частотная характеристика соответственно; на фиг. 4 следящий частотно-цифровой преобразователь; на фиг. 5 фазовращатель.
Измеритель скорости содержит приемопередающую антенну 1, циркулятор 2, свервысокочастотный фильтр 3, смеситель 4, фазовращатель 5, генератор 6 сверхвысокочастотных колебаний, усилитель 7, модулятор 8, блок 9 автоматической подстройки зоны генерации, измеритель 10 допплеровской частоты и следящий частотно-цифровой преобразователь 11.
Сверхвысокочастотный фильтр 3 состоит из корпуса 12, выполненного в форме волновода, двух индуктивных штыревых решеток 13 и 14 и подстроечного винта 15.
Следящий частотно-цифровой преобразователь 11 содержит вычитатель 16 частот, управляемый делитель 17 и реверсивный двоичный счетчик 18.
Фазовращатель 5 содержит предварительный усилитель 19, демодулятор 20, два фильтра 22 и 21 низких частот, два усилителя-ограничителя 24 и 23, элемент 25 задержки, схему И 26 и D-триггер 27.
Приемопередающая антенна 1 предназначена для передачи и приема СВЧ радиоволн, поступающих с модулятора 8 через генератор 6 сверхвысокочастотных колебаний и сверхвысокочастотный фильтр 3.
Модулятор 8 состоит из задающего кварцевого генератора прямоугольных импульсов частотой следования 100 или 75 кГц и непосредственно модулятора, который выдает на модуляционный вход генератора 6 сверхвысокочастотных колебаний сумму прямоугольного и постоянного напряжений.
Генератор 6 сверхвысокочастотных колебаний представляет собой твердотельный генератор на основе диода Ганка с электронной перестройкой варактором, работающий в диапазоне 14,1-15,2 ГГц с диапазоном электронной перестройки 110 МГц.
Генератор 6 через циркулятор 2 в режиме вентиля нагружен на сверхвысокочастотный фильтр 3, который служит для автоматической подстройки зоны генератора и температурной стабилизации. Частотная модуляция генератора 6 осуществляется блоком 9 автоматической подстройки зоны генерации.
Излученный антенной сигнал отражается от подстилающей поверхности и после приема этой же антенной через циркулятор 2 направляется на смеситель 4, в качестве которого используется детекторная секция на базе диода Шоттки с малыми шумами, где отраженный сигнал смешивается с частью излучаемого сигнала.
Принятый сигнал фильтруется и усиливается усилителем 7, который представляет собой усилитель промежуточной частоты. Частота его настройки равна частоте модуляции, полоса удвоенной полосе допплеровского спектра при максимальной скорости.
Сигнал с выхода усилителя 7 поступает на синхронный детектор блока 9 автоматической подстройки зоны генерации, конструкция и электрическая схема которого аналогичны описанным в прототипе. После синхронного детектирования с модулирующим сигналом выделяется переменное напряжение частотой Допплера.
В предлагаемом устройстве используется режим частотной манипуляции, основными преимуществами которого при соответствующем построении приемного тракта является значительное ужесточение влияния различных помех (низкочастотного шума смесителя, виброшумов антенно-волноводного тракта, пульсаций источника питания) и простота осуществления модуляции.
Для реализации частотной манипуляции служит модулятор в блоке 9, состоящий из задающего кварцевого генератора и двух формирователей прямоугольных импульсов частотой следования 75 и 100 кГц, который выдает на модуляционный варакторный вход блока 6 сумму прямоугольного и постоянного с выхода дискриминатора блока 9 напряжений.
Как известно из теории, достоинства частотной манипуляции используются лишь при равенстве мощностей преобразованных на смесителе 4 сигналов обеих частот.
Однако как при генерации, так и при прохождении СВЧ тракта сигналы обеих генерируемых частот могут быть неравными по мощности. Для выравнивания мощностей служит следящая система, образованная сверхвысокочастотным фильтром 3, усилителем 7 и дискриминатором блока 9.
Задачей следящей системы является выделение напряжения расстройки частоты генерации от частоты настройки сверхвысокочастотного фильтра 3, устранение паразитной амплитудной модуляции и слежение за средней частотой сверхвысокочастотного фильтра 3.
Со смесителя 4 и блока 9 сигналы также поступают на фазовращатель 5. Со смесителя 4 сигнал поступает на предварительный усилитель 19, а с блока 9 на демодулятор 20.
В демодуляторе 20 посредством опоры (прямоугольного напряжения) принятый сигнал разделяется на два узкополосных и низкочастотных сигнала, каждый из которых соответствует своей излученной частоте. После фильтрации и усиления сигналы подаются на логическую схему определения знака, образованную элементом 25 задержки, схемой И 26 и D-триггерами 27, которая работает следующим образом. Если один сигнал опережает другой (опорный) на величину фазы в пределах от 0 до 180о, то на выходе вырабатывается "1", а если отстает по фазе от опорного в пределах от 0 до 180о, то на выходе вырабатывается "0".
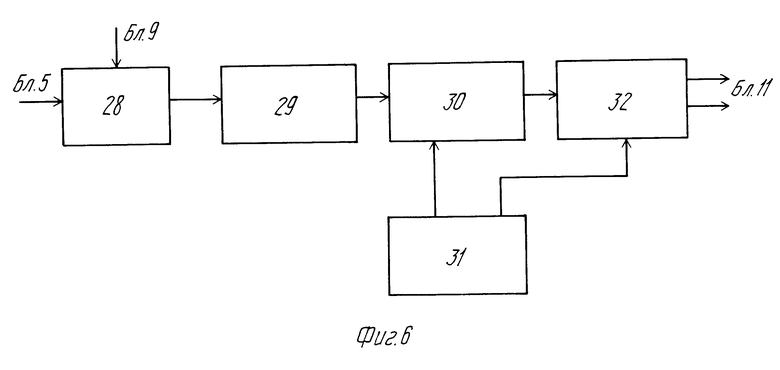
С блоков 5 и 9 сигналы поступают на измеритель 10 допплеровской частоты (фиг. 6), состоящий из фильтра 28 допплеровской частоты, формирователя 29, счетчика 30, тактового генератора 31 и выходного усилителя 32, где они после фильтрации поступают на формирователь и преобразуются в сигналы прямоугольной формы, после чего поступают на счетчик 30, на который также поступают сигналы от тактового генератора 31, где считается число импульсов за время Т (Т выбирается в зависимости от требований со стороны потребителей информации). В качестве счетчика может использоваться, например, аналоговый диодный интегратор с накопительной емкостью или дискретный счетчик импульсов. Со счетчика 30 сигналы в виде частоты Fx или Fy через выходной усилитель 32 подаются на следящий частотно-цифровой преобразователь 11, в частности на вычитатель 16 частот, на который через управляемый делитель 17 подается опорная кварцевая частота Fоп с измерителя 10. Разность частот с вычитателя 16 частот поступает на реверсивный двоичный счетчик 18 и управляемый делитель 19 до тех пор, пока разность частот не будет равной нулю, т.е. Fx KFon. На выходе реверсивного двоичного счетчика 18 в этом случае код пропорционален составляющим скорости Vx или Vy. С счетчика 18 сигналы могут подаваться на индикаторные устройства или потребителям информации, например в системы автоматического управления движением подвижных объектов.
Ввод новых элементов выгодно отличает предлагаемое устройство от аналогов и прототипа.
Как известно допплеровские системы непрерывного излучения с частотной модуляцией обладают по сравнению с обычными системами непрерывного излучения более высокой степенью разделения передающего и приемного трактов и возможностью дискриминации отраженных сигналов от близко расположенных объектов. Это объясняется тем, что при относительном нулевом сдвиге частоты сигнала гетеродина и принимаемого сигнала амплитуды боковых полос сигнала на выходе смесителя 4 уменьшаются при уменьшении пути принятого сигнала, что объясняется перераспределением мощности в пределах полосы частот этого сигнала. Для частотно-манипулированного сигнала, как частотного случая частотно-модулированного, это уменьшение будет эффективным лишь при равенстве мощностей попеременно излучаемых частот, ибо в противном случае сигнал становится амплитудно-частотно-манипулированным, что соответствует добавлению импульсного СВЧ излучения к частотно-манипулированному, при этом при отражении от близко расположенных объектов на выходе смесителя 4 появляется напряжение частоты Допплера, величина которого как и для случая обыкновенного непрерывного излучения не зависит от электрического пути сигнала.
Для выравнивания излучаемых частот, а значит и подавления паразитных сигналов, в цепь СВЧ тракта после генератора 6 СВЧ включен элемент с "колоколообразной" амплитудной частотной характеристикой, например СВЧ фильтр 3, а выравнивание мощностей производится с помощью блока 9 автоматической подстройки зоны генерации, изменяющей в небольших пределах частоты излучения. Усиление же сигнала производится на частоте манипуляции, где существует упомянутая зависимость величины сигнала от длины его пути. В отличие от известных устройств на выходе синхронного детектора в общем случае присутствуют две составляющие: напряжение частоты Допплера и постоянное напряжение, пропорциональное величине амплитудной модуляции.
Измерение направления движения основано на применении частотной модуляции излучаемого сигнала по прямоугольному закону частотной манипуляции.
При частотной модуляции излучение с частотой модуляции Fmосуществляется поочередно в виде двух сигналов, частоты которых f1 и f2отличаются от центральной частоты fo на величину девиации Δf:f1= fo Δf, f2 fo + Δf. Сигналы в соседних полупериодах модуляции, соответствующие частотам f1 и f2 выражаются формулами
εпр1 Епр cos (2 πtg t + 2 πΔf τз);
εпр2 Епр cos (2πtg t 2πΔfτз) (1) где τз время задержки, определяемое расстоянием до подстилающей поверхности τз 22 о/c.
Разность фаз допплеровских сигналов (Епр1 и Епр2) Δϕ= 8πΔfRo/c пропорциональна дальности от приемопередающей антенны 1 до подстилающей поверхности (1) соответствует положительному (встречному) направлению перемещения. При отрицательном направлении знаки фазы в формулах (1) меняются на обратные и разность фаз допплеровских сигналов становится отрицательной Δϕ= -8πΔfRo/c, т. е. для определения направления движения определяется знак разности фаз допплеровских сигналов, соответствующих частотам излучения f1 и f2 в соседние полупериоды частотной модуляции.
Кроме того, частотная модуляция позволяет существенно уменьшать влияние вибрационных помех на работу измерителя параметров движения.
Первая гармоника сигнала смесителя 4 при частотной модуляции выражается формулой
εпр 2/πEпр sin (4πΔfR/c)[sin (2π{Fm + Fд}t) sin (2π{Fm-Fд}t)]
После детектирования на синхронном детекторе с опорным напряжением частоты модуляции выделяется допплеровский сигнал
εд 2/πsin (4 πfR/c sin (2πFдt) (2)
Для получения максимального сигнала величина девиации выбирается из условия sin (4πΔfR/c) 1 или 4πΔfR/c= π/2.
Тогда Δf c/8 Rмaкc, где Rмакс максимальное расстояние до подстилающей поверхности.
Rмакс Нмакс/cos (γ), где Нмакс максимальная высота подъема корпуса объекта над подстилающей поверхностью (с учетом начальной установки приемопередающей антенны 1).
Как видно из формулы (2), для сигналов вибрационной помехи, обусловленных паразитными отражениями от антенно-волнового тракта, расстояние R ничтожно мало и сигнал вибрационной помехи существенно подавляется.
Ввод следящего частотно-цифрового преобразователя обеспечивает сглаживание флюктуаций выработанных сигналов путем скользящего усреднения с возможностью изменения времени усреднения в широких пределах, что позволяет использовать предлагаемое устройство на подвижных объектах с различными системами автоматического управления движением без доработки последних.
В предлагаемом устройстве, как и в аналогах и прототипе, приемопередающая антенна 1 широкополосна, что позволяет при необходимости существенно изменить рабочие частоты измерителя.
В то же время эти волноводно-щелевые антенны обладают частотной и температурной зависимостью. Поэтому даже при высокостабильном генераторе будет наблюдаться отклонение луча антенны при изменении температуры, что приводит к ошибкам измерения.
В предлагаемом устройстве конструкция сверхвысокочастотного фильтра 3, как показали выполненные расчеты, при нестабильном СВЧ-генераторе позволяет получить температурную ошибку частоты Допплера при одновременном изменении несущей частоты генератора, равной
ΔFд 2 Vx (0,144472 0,1436938) 2 Vx 0,0007782 Гц или ΔFд 0,078% т.е. ошибка уменьшается почти в 6 раз по сравнению с аналогом и прототипом (0,18%).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1994 |
|
RU2080620C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАЗНОСТИ ФАЗ СВЧ-СИГНАЛОВ (ВАРИАНТЫ) | 1996 |
|
RU2109303C1 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИЕМОПЕРЕДАЮЩИЙ МОДУЛЬ | 2000 |
|
RU2177628C1 |
| Радиолокационный измеритель скорости для железнодорожного транспорта | 1985 |
|
SU1341594A1 |
| СОТОВАЯ ТЕЛЕВИЗИОННАЯ ПЕРЕДАЮЩАЯ СИСТЕМА (СТПС) (ВАРИАНТЫ) | 1999 |
|
RU2152693C1 |
Использование: измерение скорости подвижных объектов. Сущность изобретения: измеритель скорости содержит приемопередающую антенну 1, циркулятор 2, сверхвысокочастотный фильтр 3, смеситель 4, фазовращатель 5, сверхвысокочастотный генератор 6, усилитель 7, модулятор 8, блок 9 автоматической подстройки зоны генерации, измеритель 10 доплеровской частоты и следящий частотно-цифровой преобразователь 11. 1-2-4-7-9-6-3-2-1, 4-5-10-11, 6-8, 9-5, 9-10. 1 з.п. ф-лы, 6 ил.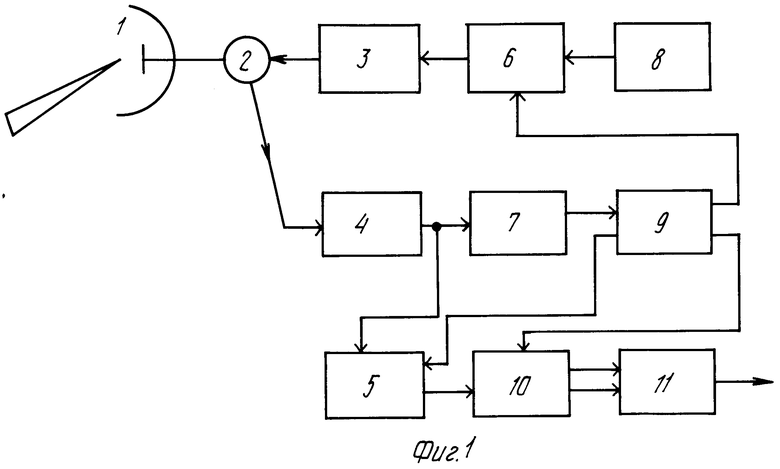
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радиолокационный измеритель скорости для железнодорожного транспорта | 1985 |
|
SU1341594A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
