Изобретение относится к области авиационного приборостроения и может быть использовано для создания систем автоматизированного управления параметрами полета, зависящими от его текущей высоты и параметров морского волнения, в частности для автоматизации посадки (приводнения) гидросамолета на гладкую и на взволнованную поверхность.
Существуют различные способы определения высоты полета самолета (гидросамолета), например, барометрический, и способы определения высоты полета с помощью изотопных и лазерных высотомеров. Известен барометрический способ определения высоты полета самолета путем учета статического давления вблизи самолета и параметров состояния атмосферы у земли (давление и плотность воздуха) (Летные испытания самолетов М.Г. Котик и др., Машиностроение, 1968 г. [1]). Недостатком данного способа является то, что при полете с дозвуковой скоростью перед фюзеляжем, крылом и другими частями самолета (гидросамолета) образуется зона повышенного давления. Эта зона настолько велика, что вынести на штанге ПВД (приемник воздушного давления) за ее пределы практически не удается. Поэтому в статическую камеру ПВД подается местное статическое давление, большее по величине, чем атмосферное статическое давление воздуха. При полете самолета на высотах, меньших размаха крыла, значительные погрешности в определении барометрической высоты вносит аэродинамическое влияние экрана (водной или земной поверхности) на поле скоростей и давлений вблизи самолета. Для точного измерения малых высот полета используют изотопные высотомеры. Для этого вдоль ВПП (взлетно-посадочной полосы) располагают датчики, содержащие радиоактивный элемент, а на самолете устанавливают оборудование, позволяющее определять точную высоту нахождения летательного аппарата над ВПП но интенсивности излучения. Однако с помощью таких высотомеров не решают задачу определения высоты полета гидросамолета при посадке на неподготовленную водную акваторию. Наиболее близким к заявляемому является известный и широко применяемый радиолокационный способ измерения высоты полета, основанный на регистрации полей излучения (полей дальней зоны), создаваемых и принимаемых антенной, установленной на самолете (гидросамолете). К классу устройств, использующих данный принцип, относятся радиовысотомеры (Летная эксплуатация радионавигационного оборудования самолетов. И.Е. Бондарчук, Транспорт, 1978 г. стр. 112-152 [2]). Особенность этого способа заключается в том, что возникает рост погрешности измерений с уменьшением высоты полета. Уменьшение погрешности достигается путем значительного усложнения аппаратуры.
Аналогами способа измерения параметров морского волнения могут служить контактные методы измерения (авторское свидетельство SU №1584513 [3]). Однако измерение в этом случае может быть произведено при нахождении гидросамолета на плаву, т.е. уже после посадки на воду.
Известно также устройство для измерения параметров морских волн посредством радиолокационного метода зондирования морской поверхности (см. "Радиолокация морской поверхности", А.А. Гарнакерьян, А.С. Сосунов, Изд. Ростовского университета, 1978 г. [4], авторское свидетельство SU №805745 [5]). Однако это устройство позволяет получить характеристики волнения при полете самолета на большой высоте.
Известно также устройство для измерения параметров морского волнения (патент RU №1788484 А1, 15.12.1989 [6]), содержащее последовательно соединенные антенну, антенный переключатель, приемник, первый детектор огибающей, первый фильтр нижних частот, второй делитель напряжений, второй квадратор, третий умножитель и второй индикатор, второй вход антенного переключателя через передатчик соединен с выходом синхронизатора, выход первого фильтра нижних частот через блок автоматической регулировки усиления соединен с вторым входом приемника, второй вход второго делителя напряжений через пятый фильтр нижних частот соединен с выходом второго детектора огибающей, выход первого детектора огибающей через центрирующий блок, компаратор нулевого уровня, преобразователь период напряжение и второй фильтр нижних частот соединен с первым входом первого умножителя, второй вход которого соединен с выходом измерителя скорости полета, а выход - с входом первого индикатора, выход центрирующего блока через первый квадратор, третий фильтр нижних частот, функциональный преобразователь и сумматор соединен с вторым входом третьего умножителя, второй вход сумматора через первый делитель напряжения, четвертый фильтр нижних частот и второй умножитель соединен с выходом центрирующего блока, выход первого квадратора соединен с вторым входом второго умножителя, а выход третьего фильтра нижних частот - с вторым входом первого делителя напряжений, отличающееся тем, что с целью повышения точности и упрощения конструкции оно снабжено последовательно соединенными радиовысотомером, генератором селективных импульсов и селектором, выход синхронизатора соединен с вторым входом генератора селективных импульсов, а выход приемника - с вторым входом селектора, выход которого соединен с входом второго детектора огибающей. Это устройство также позволяет получить характеристики волнения при полете самолета на большой высоте В известном способе измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, и параметров морского волнения для устранения такого недостатка предлагается использовать поля ближней зоны, создаваемые антенной. Эти поля имеют квазистатический характер, значит, для описания свойств антенны, обусловленных ими, допустимо использовать язык и понятия теории электрических цепей. Поля ближней зоны возрастают гораздо быстрее полей дальней зоны при уменьшении расстояния до своего источника (до антенны). Это и дает основание полагать, что погрешность измерений будет уменьшаться при снижении высоты полета. При удалении же от своего источника поля ближней зоны убывают гораздо быстрее полей дальней зоны, поэтому способ измерения высоты полета и параметров морского волнения, основанный на регистрации полей ближней зоны, может использоваться, в отличие от радиолокационных измерителей, только на очень малых высотах полета: меньше размаха крыла гидросамолета (патент RU №2183010, 27.05.2002 [7]).
При этом для повышения безопасности посадки самолета, преимущественно гидросамолета, за счет автоматического выдерживания заданной для данного типа летательного аппарата вертикальной скорости, в известном способе измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, и параметров морского волнения, основанного на регистрации физических величин, зависящих от электромагнитного поля, создаваемого установленной на самолете антенной, создается последовательный LC-контур с образованным в поле ближней зоны антенны конденсатором, одной из обкладок которого является антенна, а другой - корпус самолета, включают данный LC-контур в одно из плеч мостовой схемы, подается на вход мостовой схемы стабилизированное по амплитуде и частоте гармоническое напряжение и судят о высоте полета самолета над водным зеркалом по амплитуде снимаемого с мостовой схемы гармонического сигнала, а при взволнованной водной поверхности снимаемый с мостовой схемы сигнал детектируют, выделяют из продетектированного сигнала и измеряют постоянную и переменную составляющие, при этом о высоте полета самолета судят по постоянной составляющей, о высоте морской волны - по амплитуде низкочастотной переменной составляющей, а о длине морской волны в направлении полета и в месте, над которым пролетает самолет, - по частному от деления горизонтальной скорости самолета на частоту низкочастотной переменной составляющей. При этом индуктивность последовательного LC-контура выбирают из условия попадания резонансной частоты LC-контура при высоте полета самолета выше 50-100 м в диапазон 1,5-6 МГц. Величина емкости С зависит от высоты полета. При очень большой высоте полета она равна C0, где C0 - емкость LC-контура на большой высоте, при этом резонансная частота LC0-контура равна f0. С понижением высоты полета величина емкости С возрастает и становится равной: С=С0+ΔС, где ΔС - добавочная емкость - возрастает с уменьшением высоты и стремится к нулю при неограниченном возрастании высоты полета. Таким образом, δf - уход резонансной частоты LC-контура при снижении высоты полета самолета (гидросамолета) резко возрастает при снижении высоты полета. Однако в очень большом диапазоне изменения емкости ΔCδf - уход резонансной частоты - практически пропорционален амплитуде гармонического сигнала Uc(t), где Uc(t) - сигнал, снимаемый со средних точек мостовой схемы, на вход которой подается гармоническое напряжение U(t) стабилизированной частоты f0 и амплитуды Um. При этом сопротивление r в нижней части мостовой схемы содержит последовательный резонансный L(C0+ΔC) - контур, а L и (С0+ΔС) - идеальные (т.е. без потерь) индуктивность и емкость, а сопротивление r в верхней части плеча мостовой схемы, содержащей резонансный последовательный L(C0+ΔC)-контур, есть эквивалентное активное сопротивление реальной катушки индуктивности, вычисляемое через ее индуктивность L и добротность. Если полет происходит над взволнованной морской поверхностью, сигнал Uc(t) необходимо дополнительно подвергнуть детектированию с последующим выделением постоянной и переменной (низкочастотной) составляющих, т.к. при строго горизонтальном полете величина добавочной емкости ΔС периодически меняется, достигая максимального значения над гребнем морской волны и минимального - над впадиной, и сигнал Uc(t) можно считать амплитудно-модулированным радиотехническим сигналом.
При его детектировании амплитуда постоянной составляющей будет пропорциональна средней высоте полета над взволнованной морской поверхностью, амплитуда переменной (низкочастотной) составляющей - высоте морской волны с коэффициентом пропорциональности, зависящим от средней высоты полета, а частота низкочастотной переменной составляющей (т.е. частота огибающей сигнала) позволит найти длину морской волны в направлении полета путем деления известной горизонтальной скорости самолета на значение этой частоты. Таким образом, в силу того, что на очень малых высотах полета горизонтальная скорость самолета гораздо больше его вертикальной скорости, можно непрерывно следить за высотой полета и параметрами морского волнения в месте, над которым самолет в данный момент находится. Однако данный способ на очень малых высотах полета: меньше размаха крыла гидросамолета, работоспособен только при идеальных гидрометеорологических условиях. Кроме того, известный способ измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения, не обеспечивает определение угла встречи с волной, что является определяющим для обеспечения безопасной посадки на взволнованную водную поверхность.
Задачей предлагаемого способа измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения является расширение функциональных возможностей и повышение достоверности определения параметров морского волнения.
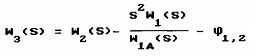
Поставленная задача решается за счет того, что в способе измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения, основанный на регистрации физических величин, зависящих от электромагнитного поля, создаваемого установленной на самолете антенной, по которым судят о высоте полета самолета, о высоте морской волны, о длине морской волны в направлении полета и в месте, над которым пролетает самолет, антенна для создания электромагнитного поля выполнена в виде пяти независимых антенн, установленных на корпусе самолета соответственно в центре тяжести самолета, в носовой и хвостовой частях самолета, и в оконечных частях крыльев самолета, о высоте морской волны судят по разности между максимальными и минимальными значениями амплитуд электромагнитного сигнала (средняя высота волны от подошвы до вершины), о длине морской волны в направлении полета и в месте, над которым пролетает самолет, судят в зависимости от соотношения высоты волны к крутизне волны, которую определяют в соответствии с зависимостью 
Заявляемый способ позволяет измерять параметры морских волн непосредственно перед посадкой гидросамолета на воду. Кроме того, этот способ позволит объединить в одном устройстве как высотомер сверхмалых высот, так и измеритель параметров морского волнения и измеритель скорости. Кроме того, в отличие от прототипа [7] обеспечивается определение фазовой скорости морской волны, что позволяет определить направление волн, что позволяет выбрать более благоприятные курсовые углы для посадки гидросамолета.
Известные бесконтактные методы определения волнения являются по своей сути интегральными и требуют для измерения широкого спектра сигналов, отраженных от значительной площади или набора данных о профилях волнения вдоль нескольких направлений (Загородников А.А. Радиолокационная съемка морского волнения с летательных аппаратов. Л.: Гидрометеоиздат, 1978. Устыленко Н.С., Лесная Л.Л. Использование микропроцессорных модулей в задачах оценки состояния морской поверхности // Обработка сигналов в локационных системах неоднородных сред. Свердловск: Изд. УПИ, 1987, вып. 1), что исключает возможность оперативного получения информации. Оперативно параметры волнения можно определить с борта летательного аппарата, используя выходные данные минимум двух однолучевых радиодоплеровских измерителей скорости и двух измерителей профиля волны.
Способ измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения поясняется чертежами (фиг. 1÷3).
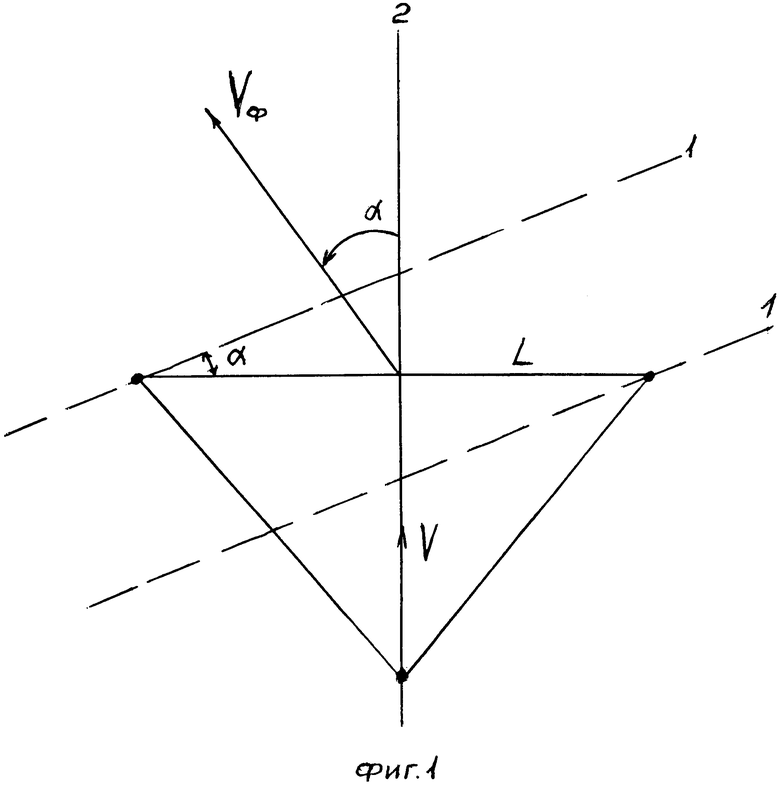
Фиг. 1. Проекция первого и второго радиолучей на горизонтальную плоскость. 1 - фронт волны, 2 - диаметральная плоскость гидросамолета, V - скорость полета, vф - фазовая скорость морской волны, τ - временной интервал прохождения морской волной радиолучей, определяемый по ее вершине, α - угол между генеральными направлениями распространения волн и диаметральной плоскостью гидросамолета (отсчитываемый от направления продольной оси гидросамолета против часовой стрелки считается положительным, а по часовой стрелке - отрицательным, L - база (расстояние между точками пересечения радиолучей и морской поверхности).
Фиг. 2. Определение горизонтальной составляющей орбитальной скорости. Vzo - вертикальная составляющая орбитального движения, γo - угол отклонения радиолуча от вертикали, Vго - горизонтальная составляющая орбитальной скорости в месте пересечения радиолуча с морской поверхностью, Ho - высота установки антенны, Ro - расстояние по радиолучу, Го и Г∑ - углы между плоскостью OZoRo направления движения гидросамолета и осью X соответственно.
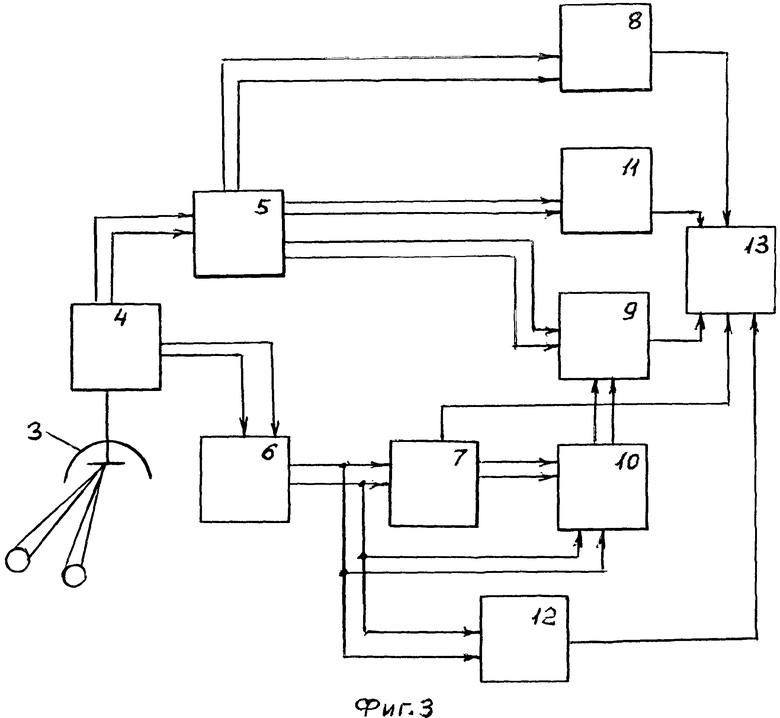
Фиг. 3. Блок-схема устройства для реализации способа. Антенна 3, приемопередатчик 4, блок измерения высоты 5, измеритель частоты Доплера 6, блок измерения скорости движения 7, вычислитель 8 для определения высоты волн и фазовой скорости волн, блок 9 для определения направления прихода волн, блок 10 для определения флюктуационной составляющей скорости, блок 11 для определения угла встречи с волной, блок 12 для измерения вертикальных перемещений летательного аппарата, блок 13 для оценки ошибок измерения.
Для двухлучевого измерителя необходимые формульные зависимости могут быть получены из фиг. 1:

где V - скорость полета, vф - фазовая скорость морской волны, τ - временной интервал прохождения морской волной радиолучей, определяемый по ее вершине, α - угол между генеральными направлениями распространения волн и диаметральной плоскостью гидросамолета (отсчитываемый от направления продольной оси гидросамолета против часовой стрелки считается положительным, а по часовой стрелке - отрицательным, L - база (расстояние между точками пересечения радиолучей и морской поверхности).
В формуле (1) перед vф/cosα ставится знак «+», если волны движутся навстречу летательному аппарату, а если направление волн совпадает с направлением движения летательного аппарата, то ставится знак «-».
Формула (1) может быть упрощена приведением ее к виду  .
.
Зная профили взволнованной морской поверхности в точках пересечения с ней радиолучей и определив по ним временной интервал т прохождения морской волной последовательно точек пересечения двух радиолучей с морской поверхностью, можно в соответствии с формулой (2) вычислить угол встречи с волной.
Для определения направления движения волны (навстречу или по ходу движения) можно использовать эффект модуляции частоты Доплера в каждом луче измерителя орбитальной скорости волн. Частоту Доплера (фиг. 2) можно записать:

где k - волновое число, Vzo - вертикальная составляющая орбитального движения, γo - угол отклонения радиолуча от вертикали, Vго - горизонтальная составляющая орбитальной скорости в месте пересечения радиолуча с морской поверхностью, Ho - высота установки антенны, Ro - расстояние по радиолучу, Го и Г∑ - углы между плоскостью OZoRo направления движения гидросамолета и осью X соответственно.
А также имеем (фиг. 2):  и
и 
где Го и Г∑ - углы между плоскостью OZoRo направления движения гидросамолета и осью X соответственно.
Далее аппроксимируя в масштабе пятна радиоизлучения на поверхности волнение двумерной синусоидальной волной имеем, что составляющие орбитальной скорости такой волны и рельеф ее поверхности h(x,y,t) могут быть представлены следующими формулами: 


где hв - высота волны, φ(x,y,t) - ее фаза.
Подставив формулы (6) и (7) в формулу (3) c учетом соотношения (4) получим:

где ωмод(x,y,t) - функция модуляции.

Из формул (9) и (10) видно, что фаза функции модуляции ωмод (x,y,t) частоты Доплера отличается от фазы рельефа h(x,y,t) на -{90 град + arctg[cos (Го-α)tgγo]}, зависящую при заданных углах γo и Го только от направления распространения волны α.
При определении параметров волнения важным свойством функции модуляции ωмод(x,y,t) является то, что составляющая ее фазы arctg[cos(Го-α)tgγo] меняет знак в зависимости от прихода волны по отношению к проекции радиолуча на горизонтальную плоскость. Так для -90 град < (Го-α)<90 град она положительна, а для
90 град<(Го-α)<180 град - она отрицательна.
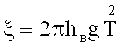
Из теории морских гравитационных волн известно, что между значением фазовой скорости волны и ее длиной λв существует зависимость vф=√gλв/2π (где g - ускорение свободного падения). Причем значение λв связано с высотой волны hв соотношением, зависящим от вида аппроксимации. Согласно Регистру λв=2,44(hв+1)2.
В свою очередь высота волн может быть определена из флюктуационной составляющей показаний измерителей высоты, которая вследствие нормальности возвышений морской поверхности также является нормальной. В этом случае высота волн 3% обеспеченности hв3%=5,3σв, где σв - среднеквадратическое отклонение измеренных возвышений морской поверхности.
Антенна 3 представляет собой волноводно-щелевую антенну с рабочим раскрывом 325×310 мм, образованным 29-ю излучающими алюминиевыми волноводами с наклонными щелями на узкой стенке. Запитка излучающих волноводов осуществляется двумя поперечными волноводами со щелями и обеспечивает получение с одного раскрыва двух лучей излучения с шириной диаграммы направленности 4°, 5. Антенна также включает волноводный тракт с циркулятором, элементы нагрузки.
Приемопередатчик 4 состоит из генератора сверхвысокой частоты, фильтра-резонатора, диодного смесителя, усилителя, блока автоматической подстройки зоны генератора, модулятора, синхронного детектора.
Блок измерения высоты 5 состоит из схемы установки начальной высоты, интегратора и преобразователя "напряжение-код".
Измеритель частоты Доплера 6 состоит из блока фильтров доплеровских частот, блока формирователей, схемы спорных частот, схемы коммутации, электронного сумматора доплеровских частот, блока выходных делителей.
Блок измерения скорости движения 7 состоит из инвертора, дифференцирующей цепи, формирователя, двух триггеров, сумматора, усилителя.
Вычислитель высоты волн и фазовой скорости волн 8 состоит из схемы выделения флюктуационной составляющей, схемы выпрямления, усилителя-ограничителя, интегратора, преобразователя "напряжение-код", предназначенных для обработки сигналов при определении высоты волн, а для определения фазовой скорости волн схема состоит из интегратора, включающего схему И, интегратор, пороговое устройство, схемы выделения знаков, включающего сумматор, пороговое устройство и преобразователя углов, включающего схему занесения знака в код и схему вычисления знака.
Блок 9 для определения направления прихода волн состоит из схемы И, сумматора, преобразователя аналог-цифра, делителя, умножителя, функционального вычислителя.
Блок 10 для определения флюктуационной составляющей скорости состоит из преобразователя частота-напряжение, схемы выделения флюктуационной составляющей, усилителя-ограничителя.
Блок 11 для определения угла встречи с волной состоит из инвертора знака, схемы коммутации, сумматора, вычитающего устройства.
Блок 12 для измерения вертикальных перемещений летательного аппарата состоит из ньютометра и аналого-цифрового преобразователя (В.Д. Андреев. Теория инерциальной навигации. М., Наука, 1966, 580 с. - с. 16-21).
Блок 13 для оценки ошибок измерения состоит из коммутатора, электронного сумматора, микропроцессора, преобразователя "частота-код", преобразователя "напряжение-код", схемы сравнения, выходного блока.
Устройство работает следующим образом. Генератор сверхвысокочастотных колебаний через циркулятор в антенне 3 в режиме вентиля нагружен на фильтр-резонатор, который служит для автоматической подстройки зоны генератора и температурной стабилизации.
Частотная модуляция генератора осуществляется блоком АПЗГ. Излученный антенной 3 сигнал отражается от подстилающей морской поверхности и после приема этой же антенной через циркулятор направляется на диодный смеситель, в качестве которого используется детекторная секция на базе диода Шотки с малыми шумами.
После преобразования с частью излучаемого сигнала, величина которого регулируется специальным винтом, принятый сигнал (первая гармоника) фильтруется и усиливается в усилителе приемопередатчика 4, частота настройки которого равна частоте модуляции, полоса - удвоенной полосе спектра при максимальной скорости судна. Сигнал с выхода усилителя приемопередатчика поступает на синхронный детектор. После синхронного детектирования с модулирующим сигналом выделяется переменное напряжение частотой Доплера.
В приемопередатчике 4 используется режим частотной манипуляции, описанный в кн. Варкапатян А.Г., Коршунов Г.И., Наделяев М.А. и др. Автоматизация контроля параметров водной среды. - Л.: Судостроение, 1988, 232 с.
С приемопередатчика 4 сигналы подаются на блок измерения высоты 5 и измеритель частоты Доплера 6, в блоке 6 обеспечивается выполнение следующих функций:
- фильтрация доплеровских сигналов;
- усиления доплеровских сигналов;
- преобразование формы доплеровских сигналов из синусоидальной формы в прямоугольную.
Фильтры низких частот представляют собой аналоговые активные фильтры, пропускающие железные сигналы в диапазоне частот от 0 до 6500 Гц. Основные помехи находятся на частоте 20 кГц, на которой работает преобразователь напряжения питания, 75 и 100 кГц - на частотах модуляции СВЧ-сигнала.
Формирователи формы сигнала преобразуют доплеровские сигналы синусоидальной формы, изменяющиеся по амплитуде и частоте, и сигналы прямоугольной формы с постоянной амплитудой и постоянной длительностью импульсов, равной минимальному периоду полезного сигнала. Во время длительного импульса формирователь не чувствителен ко входным сигналам. Таким образом, происходит дополнительная фильтрация полезного сигнала от помех, обусловленных вибрацией корпуса приемопередатчика. Данные помехи критичны при маленьких амплитудах доплеровского сигнала, при слабом отраженном сигнале СВЧ-энергии, т.е. при малом отношении сигнал/шум. Так как во время опорного периода доплеровские сигналы проходят два перехода через нулевое состояние, то частота прямоугольных импульсов на выходе формирователя в два раза выше входного доплеровского сигнала.
Схема опорных частот содержит кварцевый генератор на 200 кГц, распределитель опорных импульсных сигналов, делитель частоты. На делителе частоты формируется опорный временной интервал 0,25 с. Распределитель опорных импульсных сигналов содержит устройства синхронизации в количестве, соответствующем количеству формируемых антенной лучей. Каждое устройство синхронизации, представляющее из себя логическое триггерное кольцо, предназначенное для синхронизации опорной частотой импульсных последовательностей доплеровского сигнала. Для каждого устройства синхронизации применяется опорная частота, полученная на распределителе опорных сигналов, импульсы которого разнесены во времени. Таким образом, происходит разнесение во времени доплеровских импульсных сигналов от каждого луча.
Сигналы с измерителя частоты Доплера 6 поступают на блок измерения скорости движения 7, где формируются импульсные последовательности с частотами, пропорциональными продольной и поперечной составляющим скорости движения. В качестве входной информации используется также доплеровский сигнал, поступающий из приемопередатчика 4 для определения знака движения. Так как для каждого луча после демодуляции получены два одинаковых доплеровских сигнала со сдвигом фаз между ними, то взяв в качестве опорного сигнала один из них, определяем знак фазы другого сигнала, который характеризует знак направления движения судна.
На измеритель частоты Доплера 6 с приемопередатчика 4 подается сигнал разностной частоты Fp(t)=f1(t)-f2(t) (мгновенная частота преобразованного сигнала), которая несет информацию о сдвиге τ законов изменения частоты изучаемого f1 и принимаемого f2 сигналов
 ,
,
где Δf - девиация частоты;
ТΔf - период модуляции.
В измеритель частоты Доплера 6 при измерении высоты движения от антенны до подстилающей поверхности используется пропорциональная связь ее с разностной частотой Н=ΔtFp,
где  - коэффициент пропорциональности.
- коэффициент пропорциональности.
Определение величины Fp в блоке измерения высоты 5 сводится к счету числа импульсов, (например, положительных полуволн сигнала разностной частоты) за период модуляции. При излучении попеременно с частотой манипуляцией двух сигналов f1,2(t)=Em1,2cos(ω1,2+φ1,2),
где Em1,2, ω1,2+φ1,2 - амплитуда, частота и фаза соответственно, принятые сигналы имеют вид:
 .
.
где Ω1,2(t) - доплеровские частоты;
K1,2 - волновые числа;
R - наклонная дальность.
Разность фаз удобнее измерять у напряжений, имеющих низкую частоту, например Доплера. Такие сигналы образуются путем смещения принятого сигнала с частью излучаемого:
f1,2(t)=Emcм·2cos(Ω1,2(t)±2K1,2R).
При этом разность фаз при K1<K2 равняется

Постоянная составляющая (Δφ) пропорциональна средней дальности до поверхности, а переменная - ее профиль, причем размах переменной составляющей 
Сигналы скорости и высоты подаются в блок 9 для определения направления прихода волн, где происходит определение угла прихода волны для каждой пары лучей с алгоритмами (1÷10).
Сигналы с вычислителя 8 для определения высоты волн и фазовой скорости волн и блока 9 для определения направления прихода волн поступают на блок 11 для определения угла встречи с волной, где полученные углы приводятся к диаметральной плоскости судна.
Блок 12 для измерения вертикальных перемещений летательного аппарата обеспечивает измерение собственных вертикальных перемещений объекта, сигналы о которых в цифровом виде подаются на блок 13 для оценки ошибок измерения.
Так как каналы измерения не являются узкополостными и содержат спектральные составляющие, искаженные шумами измерения, то для очищения этих сигналов от помех введен блок 13 для оценки ошибок измерения, в котором обеспечивается решение передаточных функций вида:
 ;
;
 ;
;
 .
.
Антенна 3 для создания электромагнитного поля выполнена в виде пяти независимых антенн, установленных на корпусе самолета соответственно в центре тяжести самолета, в носовой и хвостовой частях самолета и в оконечных частях крыльев самолета.
О высоте морской волны судят по разности между максимальными и минимальными значениями амплитуд электромагнитного сигнала (средняя высота волны от подошвы до вершины), о длине морской волны в направлении полета и в месте, над которым пролетает самолет, судят в зависимости от соотношения высоты волны к крутизне волны, которую определяют в соответствии с зависимостью
Предлагаемый способ измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения, основанный на регистрации физических величин, зависящих от электромагнитного поля в отличие от аналогов и прототипов обеспечивает полный набор спектральных составляющих измеряемых параметров в наиболее очищенном от помех виде, что обеспечивает высокую точность и безинерционность измерений. Выполненная оценка точности измерения посредством предлагаемого устройства показала, что при h3%=4 м (неполное шестибальное волнение), φ=45°, Δf=0,01 Гц и характерной скорости летательных аппаратов в районе посадки, например, при V=150 м/с, среднеквадратичное значение ошибки измерения составит:

что значительно выше, чем у аналогов и прототипа: 0,031<0,2 м при волнении моря около 6 баллов по шкале Гугмо.
Морское волнение является наиболее существенным возмущающим фактором для абсолютного большинства судов и неводоизмещающих морских аппаратов (на подводных крыльях или воздушной подушке, экранопланов; гидросамолетов и морских вертолетов при взлете и посадке) как объектов управления. Его влияние приводит к возникновению нежелательных колебательных движений, ухудшающих функциональную эффективность, безопасность и комфортность использования таких аппаратов по сравнению со случаем штилевого моря. Использование предлагаемого способа позволит осуществлять адаптацию контура управления и характеристикам морского волнения.
Источники информации
1. Летные испытания самолетов. М.Г. Котик и др., Машиностроение, 1968 г.
2. Летная эксплуатация радионавигационного оборудования самолетов. И.Е. Бондарчук, Транспорт, 1978 г., стр. 112-152.
3. Авторское свидетельство SU №1584513.
4. Радиолокация морской поверхности", А.А. Гарнакерьян, А.С. Сосунов, Изд. Ростовского университета, 1978 г.
5. Авторское свидетельство SU №805745.
6. Патент RU №1788484 А1, 15.12.1989
7. Патент RU №2183010, 27.05.2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
Изобретение относится к неконтактным океанографическим измерениям и может быть использовано для определения статистических характеристик морского волнения с борта движущегося судна. Способ измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения, основанный на регистрации физических величин, зависящих от электромагнитного поля, создаваемого установленной на самолете антенной, по которым судят о высоте полета самолета, о высоте морской волны, о длине морской волны в направлении полета и в месте, над которым пролетает самолет, в котором антенна для создания электромагнитного поля выполнена в виде пяти независимых антенн, установленных на корпусе самолета соответственно в центре тяжести самолета, в носовой и кормовой частях самолета, и в оконечных частях крыльев самолета. Техническим результатом является повышение достоверности и информативности измерения высоты морских волн с борта летательного аппарата для обеспечения посадки на морскую поверхность. 3 ил.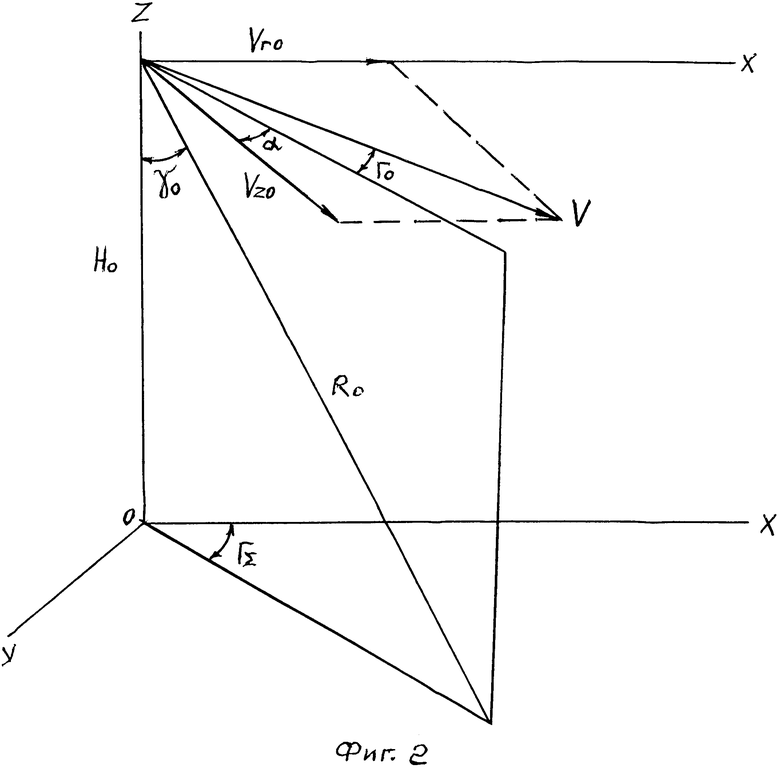
Способ измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, над водной поверхностью и параметров морского волнения, основанный на регистрации физических величин, зависящих от электромагнитного поля, создаваемого установленной на самолете антенной, по которым судят о высоте полета самолета, о высоте морской волны, о длине морской волны в направлении полета и в месте, над которым пролетает самолет, отличающийся тем, что антенна для создания электромагнитного поля выполнена в виде пяти независимых антенн, установленных на корпусе самолета соответственно в центре тяжести самолета, в носовой и хвостовой частях самолета, и в оконечных частях крыльев самолета, о высоте морской волны судят по разности между максимальными и минимальными значениями амплитуд электромагнитного сигнала (средняя высота волны от подошвы до вершины), о длине морской волны в направлении полета и в месте, над которым пролетает самолет, судят в зависимости от соотношения высоты волны к крутизне волны, которую определяют в соответствии с зависимостью  (где hв - высота волны, Т - период волны), период волнения определяют в зависимости от соотношения амплитуды волны и амплитуды ускорения.
(где hв - высота волны, Т - период волны), период волнения определяют в зависимости от соотношения амплитуды волны и амплитуды ускорения.
| СПОСОБ ИЗМЕРЕНИЯ РАДИОВЫСОТОМЕРОМ МАЛЫХ И ПРЕДЕЛЬНО МАЛЫХ ВЫСОТ | 2004 |
|
RU2262717C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА, ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1999 |
|
RU2183010C2 |
| ЕМКОСТНЫЙ ДАТЧИК СВЕРХМАЛЫХ ВЫСОТ ПОЛЕТА ГИДРОСАМОЛЕТА | 2001 |
|
RU2196077C2 |
| RU 99116289 A, 20.05.2001 | |||

