Изобретение относится к области навигации, а более конкретно к измерению параметров волнения посредством устройств, представляющих собой радиотехническое неконтактные измерители.
Известные устройства (А.А. Загородников. Радиолокационная съемка морского волнения. Л. , Гидрометеоиздат, 1978, с. 141-158) содержат приемник и передатчик когерентной РЛС, стробирующее устройство, схему получения доплеровской частоты, частотомер, запоминающее устройство, корректирующий фильтр и спектроанализатор. Принцип работы которых заключается в облучении морской поверхности электромагнитными волнами, приема отраженных сигналов, выделения сигнала с заданной фиксированной дальностью, измерения доплеровской частоты, преобразование доплеровской частоты в напряжение, фиксирование этого напряжения в запоминающем устройстве и далее через корректирующий фильтр подается на спектро-анализатор.
Существенным недостатком данных устройств является длительный период измерения порядка 20 мин, что может оказаться недопустимым для оперативного получения данных о волнении, а также необходимость фиксации облучаемой площади моря позволяет реально применять эти устройства только с вертолетов либо других летательных аппаратов, имеющих режим висения. Точность измерения данных устройств невелика, что требует выполнения нескольких серий измерения.
Известно также устройство - прототип, описанное в статье: "Определение параметров волнения совмещенной системой измерения скорости судна и высоты волн" (Ванаев А.П., Чернявец В.В. - Судостроение N 8-9, 1993 с. 6-8), состоящее из антенны, приемопередатчика, блока измерения высоты, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя, устройства для определения направления прихода волн, схемы определения флюктационной составляющей скорости, вычислителя угла встречи с волной, позволяющее оперативно измерить параметры волнения не только с летательных аппаратов, имеющих режим висения, но и с борта любых подвижных морских объектов.
Прототип выгодно отличается от аналогов, однако он измеряет относительную высоту, определяемую разностью текущей высоты борта и возвышения профиля волны, что существенно препятствует достижению точности измерения параметров волнения. На точность измерения данного устройства оказывают влияние внешние возмущения, вызываемые качкой судна.
Целью настоящего предложения является повышение точности измерения параметров волнения.
Указанная цель достигается тем, что в устройство, состоящее из антенны, приемопередатчика, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя, схемы определения флюктуационной составляющей скорости, устройства для определения направления прихода волн, вычислителя угла встречи с волной, в котором антенна входом и выходом соединена с входом и выходом приемопередатчика, который двумя выходами соединен с двумя входами блока измерения высоты, который двумя выходами соединен с вычислителем и этими же выходами соединен с двумя входами вычислителя высоты волн и фазовой скорости волн и еще двумя выходами соединен с устройством для определения направления прихода волн, выход которого соединен со входом вычислителя угла встречи с волной, два других входа которого соединены соответственно с выходами вычислителя, вычислителя высоты волн и фазовой скорости волн и еще два входа устройства для определения направления прихода волн соединены с двумя выходами схемы определения флюктуационной составляющей скорости, которая двумя входами соединена с двумя выходами блока измерения скорости и еще двумя входами соединена с двумя выходами измерителя доплеровской частоты, который этими же выходами соединен с двумя входами блока измерения скорости, а измеритель частоты Доплера двумя входами соединен с еще двумя выходами приемопередатчика введены измерительный модуль и блок коррекции, который своими входами соответственно соединен с выходами вычислителя высоты волн и фазовой скорости волн, вычислителя угла встречи с волной, блока измерения скорости и двумя выходами измерительного модуля, который входом соединен с выходом блока измерения скорости, который еще двумя входами соединен с теми же выходами приемопередатчика, что и измеритель частоты Доплера, а выход блока коррекции является выходом устройства.
Блок-схема предлагаемого устройства представлена на чертеже (фиг. 1): антенна 1, приемопередатчик 2, блок измерения высоты 3, измеритель частоты Доплера 4, блок измерения скорости 5, вычислитель высоты волн и фазовой скорости волн 6, вычислитель 7, устройство для определения направления прихода волн 8, схема определения флюктуационной составляющей скорости 9, вычислитель угла встречи с волной 10, измерительный модуль 11, блок сопряжения 12.
Антенна 1 представляет собой волноводно-щелевую антенну с рабочим раскрывом 325 х 310 мм, образованный 29-ю излучающими алюминиевыми волноводами с наклонными щелями на узкой стенке. Запитка излучающих волноводов осуществляется двумя поперечными волноводами со щелями и обеспечивает получение с одного раскрыва четырех лучей излучения с шириной диаграммы направленности 4o, 5. Антенна также включает волноводный тракт с циркулятором, элементы нагрузки.
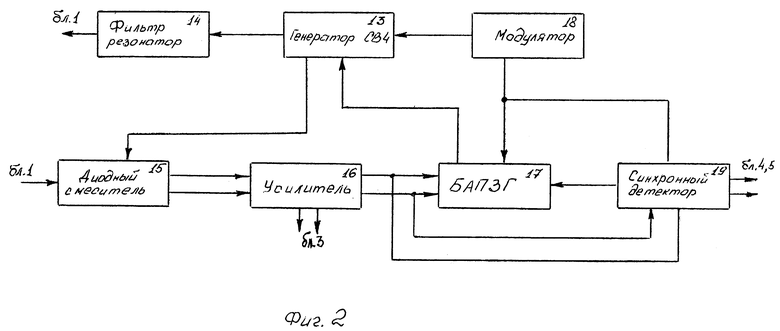
Приемопередатчик 2 (фиг. 2) состоит из генератора сверхвыской частоты 13, фильтра-резонатора 14, диодного смесителя 15, усилителя 16, блока автоматической подстройки зоны генератора 17, модулятора 18, синхронного детектора 19.
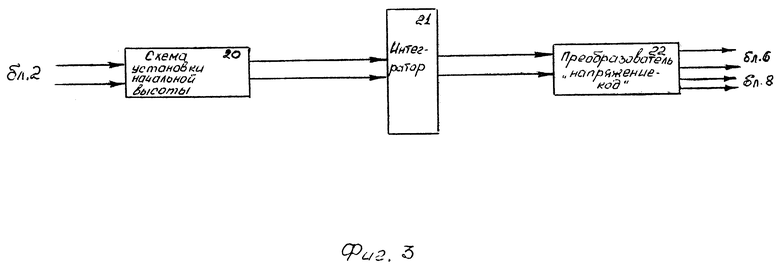
Блок измерения высоты 3 (фиг. 3) состоит из схемы установки начальной высоты 20, интегратора 21 и преобразователя "напряжение-код" 22.
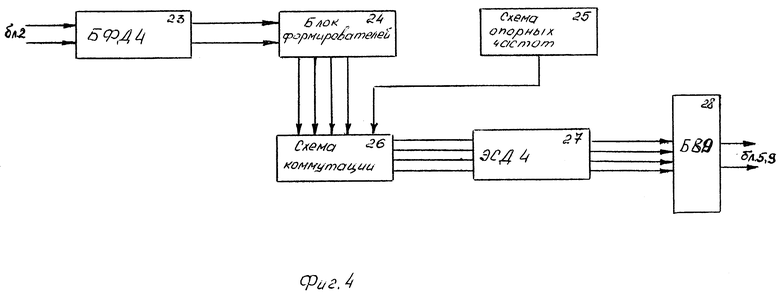
Измеритель частоты Доплера 4 (фиг. 4) состоит из блока фильтров доплеровских частот 23, блока формирователей 24, схемы спорных частот 25, схемы коммутации 26, электронного сумматора доплеровских частот 27, блока выходных делители 28.
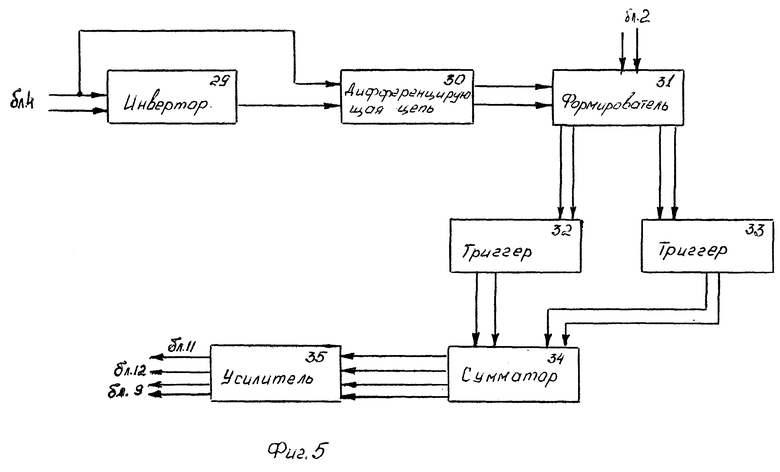
Блок измерения скорости (фиг. 5) состоит из инвертора 29, дифференцирующей цепи 30, формирователя 31, двух триггеров 32, 33, сумматора 34, усилителя 35.
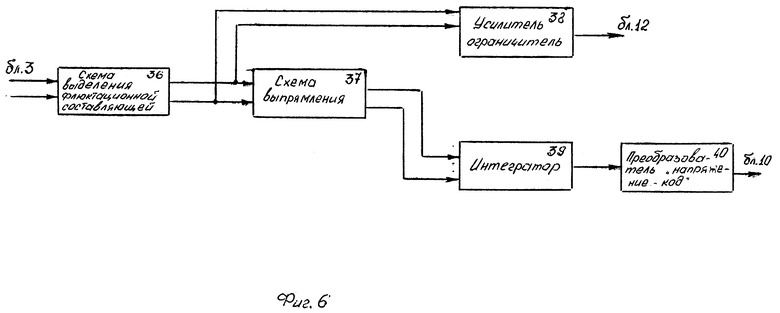
Вычислитель высоты волн и фазовой скорости волн 6 (фиг. 6) состоит из схемы выделения флюктуационной составляющей 36, схемы выпрямления 37, усилителя-ограничителя 38, интегратора 39, преобразователя "напряжение-код" 40.
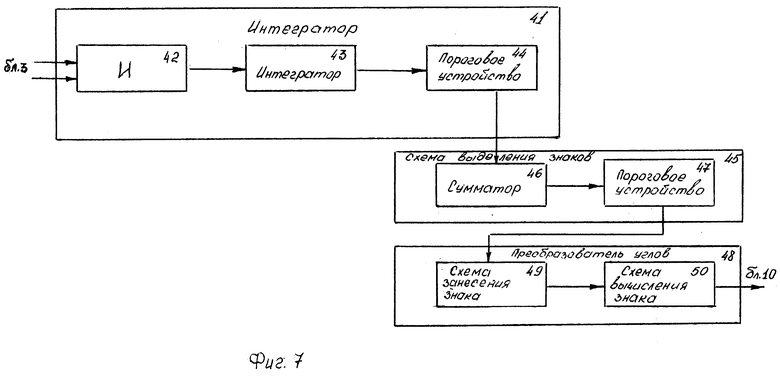
Вычислитель 7 (фиг. 7) состоит из интегратора 41, включающего схему И 42, интегратора 43, пороговое устройство 44, схемы выделения знаков 45, включающим сумматор 46, пороговое устройство 47 и преобразователя углов 48, включающего схему занесения знака в код 49 и схему вычисления знака 50.
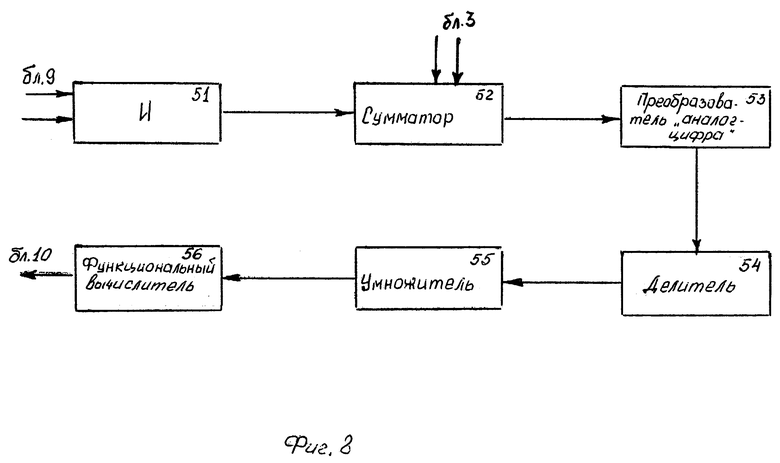
Устройство для определения направления прихода волн 8 (фиг. 8) состоит из схемы и 51, сумматора 52, преобразователя аналог-цифра 53, делителя 54, умножителя 55, функционального вычислителя 56.
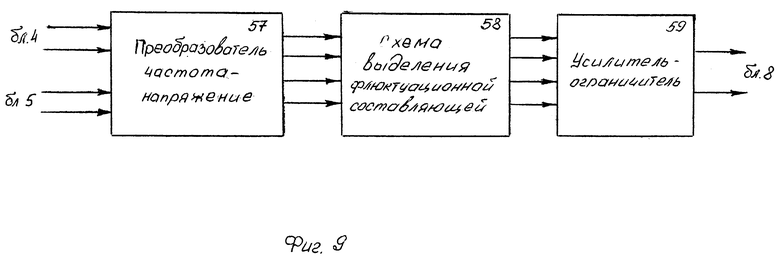
Схема определения флюктуационной составляющей скорости 9 (фиг. 9) состоит из преобразователя частота-напряжение 57, схемы выделения флюктуационной составляющей 58, усилителя-ограничителя 59.
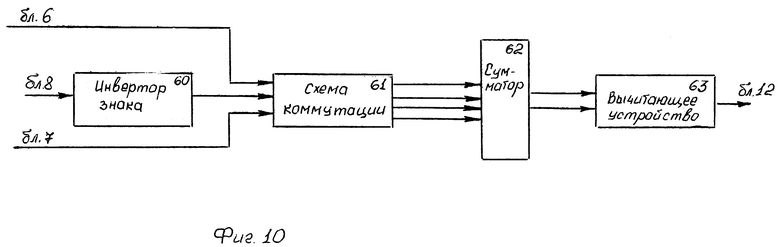
Вычислитель угла встречи с волной 10 (фиг. 10) состоит из инвертора знака 60, схемы коммутации 61, сумматора 62, вычитающего устройства 63.
Аналогами блоков 1-10 являются устройства, описанные в кн. Колчинский В. Е. , Константиновский М.И. Доплеровские устройства и системы навигации. М., Советское радио, 1975, а также в заявке N 93-026874 (09) 027093 от 19.05.93 г. и авторских свидетельствах NN 296711 - 1989 г., 326577 - 1991 г., 198466 - 1989 г.
Измерительный модуль 11 состоит из ньютометра и аналого-цифрового преобразователя. Ньютометр описан в кн. В.Д. Андреев. Теория инерциальной навигации. М., Наука, 1966, 580 с. - с. 16-21.
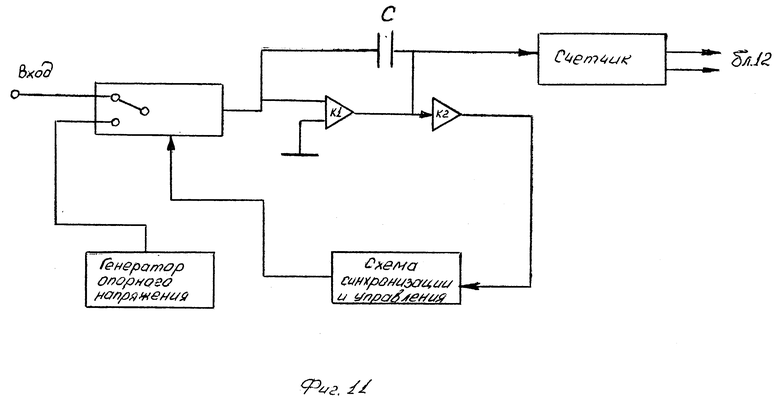
Аналого-цифровой преобразователь (фиг. 11) представляет собой интегрирующий преобразователь, в котором такты интегрирования регулирует схема синхронизации и управления, связанная с выходом второго компаратора. В первом такте входной сигнал (верхнее положение переключателя) интегрируется в течение фиксированного интервала времени, определяемого схемой синхронизации и управления. Во втором такте (нижнее положение переключателя) на вход интегратора подается сигнал спорного напряжения. Время интегрирования во втором такте переменно и определяется моментом равенства нулю выходного напряжения интегратора. Аналоги описаны в кн. Ю.М. Смирнов, Г.И. Воробьев. Специализированные ЭВМ. М., Высшая школа, 1989-144 с., с. 72-87.
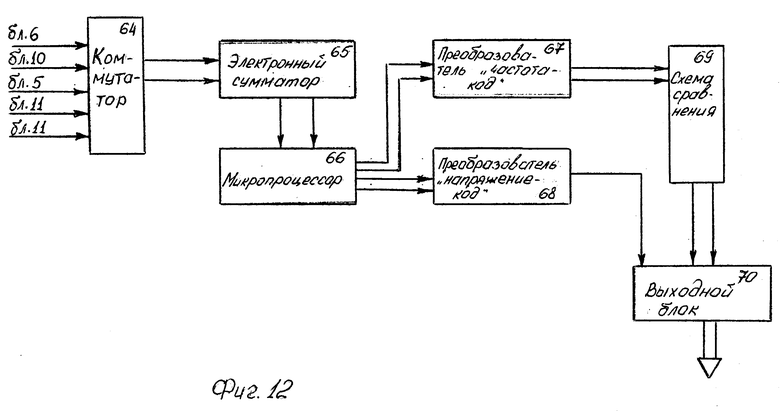
Блок коррекции 12 (фиг. 12) состоит из коммутатора 64, электронного сумматора 65, микропроцессора 66, преобразователя "частота-код" 67, преобразователя "напряжение-код" 68, схемы сравнения 69, выходного блока 70.
Микропроцессор 66 собран на базе комплекта БИС К1804 (Комплект БИС К1804 в процессорах и контроллерах) В.М. Мещеряков, И.Е. Лобов, С.С. Глебов и др. - Под ред. В.Б. Смолова / М.,: Радио и связь, 1990 - 256 с.).
Устройство работает следующим образом. Генератор сверхвысокочастотных колебаний 13 через циркулятор в антенне 1; в режиме вентиля нагружен на фильтр-зонатор 14, который служит для автоматической подстройки зоны генератора и температурной стабилизации. Частотная модуляция генератора осуществляется блоком АПЗГ 17. Излученный антенной 1 сигнал отражается от подстилающей морской поверхности и после приема этой же антенной через циркулятор направляется на диодный смеситель 15, в качестве которого используется детекторная секция на базе диода Шотки с малыми шумами.
После преобразования с частью излучаемого сигнала, величина которого регулируется специальным винтом, принятый сигнал (первая гармоника) фильтруется и усиливается в блоке 16, частота настройки которого равна частоте модуляции, полоса - удвоенной полосе спектра при максимальной скорости судна. Сигнал с выхода бл. 16 поступает на синхронный детектор 19. После синхронного детектирования с модулирующим сигналом выделяется переменное напряжение частотой Доплера.
В приемопередатчике 2 используется режим частотной манипуляции, описанный в кн. Варкапатян А.Г., Коршунов Г.И., Наделяев М.А. и др. Автоматизация контроля параметров водной среды. - Л.: Судостроение, 1988, 232 с.
С блока 2 сигналы подаются на блоки 3 и 4, в блоке 4 обеспечивается выполнение следующих функций:
- фильтрация доплеровских сигналов;
- усиления доплеровских сигналов;
- преобразование формы доплеровских сигналов из синусоидальной формы в прямоугольную.
Фильтры низких частот представляют собой аналоговые активные фильтры, пропускающие железные сигналы в диапазоне частот от 0 до 6500 Гц. Основные помехи находятся на частоте 20 кГц, на которой работает преобразователь напряжения питания, 75 и 100 кГц - на частотах модуляции СВЧ сигнала.
Формирователи формы сигнала преобразуют доплеровские сигналы синусоидальной формы, изменяющиеся по амплитуде и частоте, и сигналы прямоугольной формы с постоянной амплитудой и постоянной длительностью импульсов, равной минимальному периоду полезного сигнала. Во время длительного импульса формирователь не чувствителен ко входным сигналам. Таким образом, происходит дополнительная фильтрация полезного сигнала от помех, обусловленных вибрацией корпуса приемопередатчика. Данные помехи критичны при маленьких амплитудах доплеровского сигнала, при слабом отраженном сигнале СВЧ энергии, т.е. при малом отношении сигнал/шум. Так как во время опорного периода доплеровские сигналы проходят два перехода через нулевое состояние, то частота прямоугольных импульсов на выходе формирователя в два раза выше входного доплеровского сигнала.
Схема опорных частот 25 содержит кварцевый генератор на 200 кГц, распределитель опорных импульсных сигналов, делитель частоты. На делителе частоты формируется опорный временной интервал 0,25 с. Распределитель опорных импульсных сигналов содержит устройства синхронизации в количестве соответствующем количеству формируемых антенной лучей. Каждое устройство синхронизации, представляющее из себя логическое триггерное кольцо, предназначенное для синхронизации опорной частотой импульсных последовательностей доплеровского сигнала. Для каждого устройства синхронизации применяется опорная частота, полученная на распределителе опорных сигналов, импульсы которого разнесены во времени. Таким образом, происходит разнесение во времени доплеровских импульсных сигналов от каждого луча.
Сигналы бл. 4 поступают на бл. 5, где формируются импульсные последовательности с частотами, пропорциональными продольной и поперечной составляющим скорости движения. В качестве входной информации используется также доплеровский сигнал, поступающий из приемопередатчика 2 для определения знака движения. Так как для каждого луча после демодуляции получены два одинаковых доплеровских сигнала со сдвигом фаз между ними, то взяв в качестве опорного сигнала один из них, определяем знак фазы другого сигнала, который характеризует знак направления движения судна.
На бл. 3 с бл. 2 подается сигнал разностной частоты Fp(t)=f1(t)-f2(t) (мгновенная частота преобразованного сигнала), которая несет информацию о сдвиге τ законов изменения частоты изучаемого f1 и принимаемого f2 сигналов
где Δf - девиация частоты;
TΔf - период модуляции.
В бл. 3 при измерении высоты движения от антенны до подстилающей поверхности, используется пропорциональная связь ее с разностной частотой
H = ΔtFp,
где  коэффициент пропорциональности.
коэффициент пропорциональности.
Определение величины Fр с бл. 3 сводится к счету числа импульсов, (например, положительных полуволн сигнала разностной частоты) за период модуляции.
При излучении попеременно с частотой манипуляцией двух сигналов
f1,2(t) = Em1,2cos(ω1,2+ϕ1,2),
где Em1,2,ω1,2+ϕ1,2 - амплитуда, частота и фаза соответственно, принятые сигналы имеют вид:
где Ω1,2(t) - доплеровские частоты;
K1,2 - волновые числа;
R - наклонная дальность.
Разность фаз удобнее измерять у напряжений, имеющих низкую частоту, например Доплера. Такие сигналы образуются путем смещения принятого сигнала с частью излучаемого:
f1,2(t) = Emсм•2cos(Ω1,2(t)±2K1,2R).
При этом разность фаз при K1 < K2 равняется
Постоянная составляющая (Δϕ) пропорциональна средней дальности до поверхности, а переменная ее профиль, причем размах переменной составляющей  пропорциональна высоте волны, т.е. для выделения высоты волны необходимо измерить разность фаз с выделением из результата флюктуационной составляющей, что производится в бл. 6.
пропорциональна высоте волны, т.е. для выделения высоты волны необходимо измерить разность фаз с выделением из результата флюктуационной составляющей, что производится в бл. 6.
В вычислителе 7 производится измерение τ. В бл. 9 производится преобразование напряжения доплеровской частоты в последовательность импульсов с частотой следования, равной частоте Доплера и согласование этой последовательности, но с переменной постоянной времени, что необходимо для более эффективного согласованния флюктуаций частоты Доплера, вызванных случайным характером принятого сигнала, и выделения флюктуаций, вызванных волнением.
Сигналы скорости и высоты подаются в блок 8, где происходит определение угла прихода волны для каждой пары лучей в соответствии с алгоритмами, описанными в прототипе. Сигналы с бл. 6, 7, 8 подаются на бл. 10, где полученные углы приводятся к диаметральной плоскости судна.
Бл. 11 обеспечивает измерение собственных вертикальных перемещений объекта, сигналы о которых в цифровом виде подаются на бл. 12.
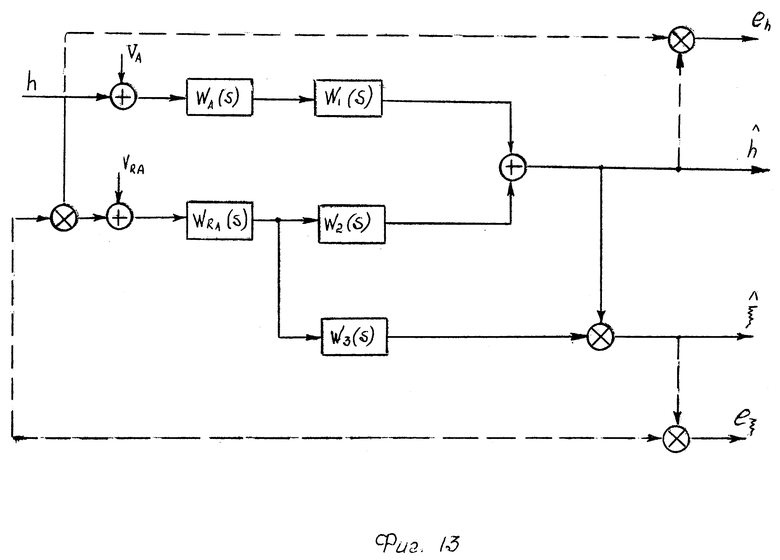
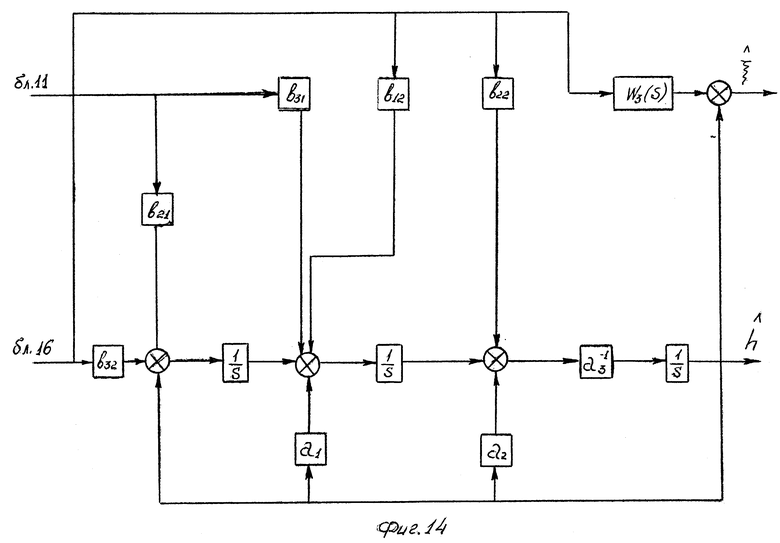
Так как каналы измерения не являются узкополостными, то на выходе бл. 5, 6, 7, 11 сигналы содержат спектральные составляющие, искаженные шумами измерения. Для очищения этих сигналов от помех введен бл. 12 в котором обеспечивается решение передаточных функций вида (фиг. 13)
Структурная схема, поясняющая решение задачи очищения сигналов от помех, вызванных шумами измерения приведена на фиг. 14, где h(t) и ζ(t) измеряемые абсолютная высота движения и высота профиля волн; h'(t) и ζ(t) оценки этих величин: l1(t)= h(t)-h'(t) и l2(t)= (t)-'(t) - ошибки измерений; V01(t) и V02(t) - погрешности измерения бл. 2 и 11; W1A(S) и WA1(S) известные передаточные функции бл. 2 и 11; W1,2,3(S) искомые передаточные функции каналов очищения сигналов в бл. 12.
Ввод новых элементов выгодно отличает предлагаемое устройство от аналогов и прототипов, т.к. обеспечивается полный набор спектральных составляющих измеряемых параметров в наиболее очищенном от помех виде, что обеспечивает высокую точность и безинерционность измерений. Выполненная оценка точности измерения посредством предлагаемого устройства показала, что при h3% = 4 м (неполное шестибальное волнение), ϕ = 45°,Δf = 0,01 Гц и характерной скорости высокоскоростных подвижных объектов (например, экраноплан) V = 150 м/с среднеквадратичное значение ошибки измерения составит:
что значительно выше, чем у аналогов и прототипа: 0,031 < 0,2 м при волнении моря около 6 баллов по шкале Гугмо.
Морское волнение является наиболее существенным возмущающим фактором для абсолютного большинства судов и неводоизмещающих морских аппаратов (на подводных крыльях или воздушной подушке, экранопланов; гидросамолетов и морских вертолетов при взлете и посадке), как объектов управления. Его влияние приводит к возникновению нежелательных колебательных движений, ухудшающих функциональную эффективность, безопасность и комфортность использования таких аппаратов по сравнению со случаем штилевого моря. Использование предлагаемого устройства позволит осуществлять адаптацию контура управления и характеристикам морского волнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| Устройство для измерения параметров морской волны | 2017 |
|
RU2689539C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 2012 |
|
RU2523102C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1994 |
|
RU2080620C1 |
Изобретение относится к области навигации, а точнее к измерению параметров волнения с помощью неконтактных измерителей. Достигаемый технический результат - повышение точности измерений. Устройство измерения параметров волнения состоит из антенны, приемопередатчика, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волны, вычислителя, схемы определения флуктуационной составляющей скорости, устройства для определения направления прихода волн, вычислитель угла встречи с волной, а также из введенных измерительного модуля и блока коррекции, совокупность которых во взаимодействии позволяет реализовать указанный технический результат. 14 ил.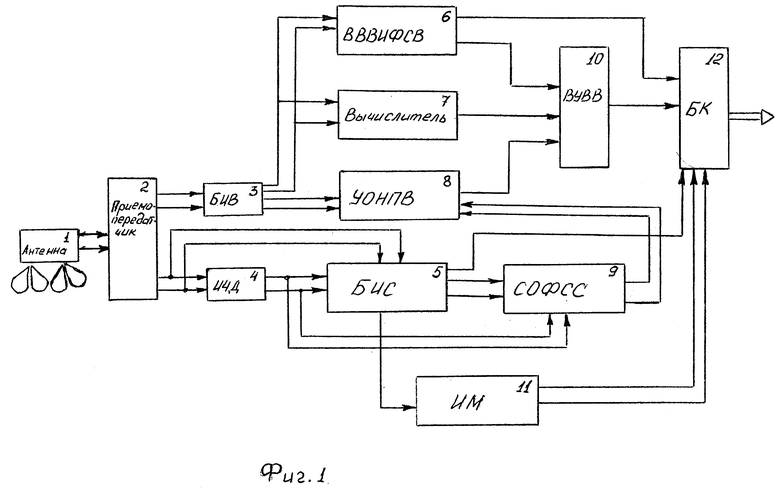
Устройство измерения параметров волнения, состоящее из антенны, приемопередатчика, измерителя частоты Доплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, вычислителя, схемы определения флуктуационной составляющей скорости, устройства для определения направления прихода волн, вычислителя угла встречи с волной, в котором антенна входом и выходом соединена с входом и выходом приемопередатчика, который двумя выходами соединен с двумя входами блока измерения высоты, который двумя выходами соединен с вычислителем и этими же выходами соединен с двумя входами вычислителя высоты волн и фазовой скорости волн и еще двумя выходами соединен с устройством для определения направления прихода волн, выход которого соединен со входом вычислителя угла встречи с волной, два других входа которого соединены соответственно с выходами вычислителя, вычислителя высоты волн и фазовой скорости волн и еще два входа устройства для определения направления прихода волн соединены с двумя выходами схемы определения флуктуационной составляющей скорости, которая двумя входами соединена с двумя выходами и блока измерения скорости и еще двумя входами соединена с двумя выходами измерителя доплеровской частоты, который этими же выходами соединен с двумя входами блока измерения скорости, а измеритель частоты Доплера двумя входами соединен с еще двумя выходами приемопередатчика, отличающееся тем, что введены измерительный модуль и блок коррекции, который своими входами соответственно соединен с выходами вычислителя высоты волн и фазовой скорости волн, вычислителя угла встречи с волной, блока измерения скорости и двумя выходами измерительного модуля, который входом соединен с выходом блока измерения скорости, который еще двумя входами соединен с теми же выходами приемопередатчика, что и измеритель частоты Доплера, а выход блока коррекции является выходом устройства.
| Ванаев А.П., Чернявец В.В | |||
| Определение параметров волнения совмещенной системой измерения скорости судна и высоты волн | |||
| - Судостроение, N 8 - 9, 1993, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Загородников А.А | |||
| Радиолокационная съемка морского волнения | |||
| - Л.: Гидрометеоиздат, 1978, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
| Когерентно-импульсное устройство для измерения высоты морских волн | 1977 |
|
SU662888A1 |
| Устройство для измерения спектральных характеристик морского волнения | 1989 |
|
SU1788484A1 |
| ГРЯДОДЕЛАТЕЛЬ-СЕЯЛКА | 2004 |
|
RU2275777C1 |
