Изобретение относится к сельскому хозяйству, в частности к орудиям для обработки почвы в рядах многолетних насаждений, например садов и виноградников.
Если обработка почвы между рядами насаждений выполняется обычно культиваторами, обеспечивающими рыхление верхнего слоя почвы и подрезку корней сорных растений, то такая обработка в рядах насаждений встречает определенные трудности. Известные устройства для этой цели имеют, как правило, основной рыхлитель, поддерживающая стойка которого перемещается горизонтально вдоль и в рядах насаждений, причем отслеживающий элемент (щуп) при приближении рыхлителя к стволу (штамбу) растения побуждает действие механизма, отклоняющего рыхлитель от ствола (штамба) растения. После того, как устройство минует ствол (штамб) растения, рыхлитель опускается в почву и продолжает ее обработку. Таким образом, рабочий орган должен развить силу, необходимую для преодоления сопротивления почвы и корней сорняков, и в то же время отслеживающий элемент должен иметь большую чувствительность и быстродействие, чтобы отключить рыхлитель при слабом толчке при встрече щупа со стволом растения. Эти два противоположных требования делают подобные устройства дорогостоящими и сложными, а их функционирование малонадежным.
Известно устройство для обработки почвы (культивации) в рядах и в междурядьях растений, в котором для обработки в рядах имеется отдельный рабочий орган в виде крыльчатки, закрепленной поворотно на наклоненной оси с фиксатором, жестко связанным через систему рычагов со щупом.
Недостатком этого известного устройства является то, что щуп должен с усилием скользить по стволу (штамбу) все время прохождения мимо него рабочего органа и поскольку щуп жестко связан с механизмом управления, то в месте контакта щупа со стволом (штамбом) возникают большие усилия, а это может привести к повреждению стволов растений.
Известно также устройство аналогичного назначения, принятое в качестве прототипа и содержащее раму с вращающимся рабочим органом, выполненным в виде четырехлопастной крыльчатки с наклонной осью вращения, механизм управления поворотом крыльчатки, выполненный в виде шарнирного четырехзвенника, ведомое коромысло которого взаимодействует с одной из лопастей крыльчатки, а на ведущем коромысле закреплен направленный наружу горизонтальный рычажный спусковой элемент, один конец которого воспринимает внешнее усилие, а второй является ведущим коромыслом, при этом оси ведущего коромысла и шарниров, соединяющих шатун с ведущим и ведомым коромыслами, расположены на одной прямой линии с некоторым отклонением внутрь от этой линии центрального шарнира, снабженного ограничительным упором. Известное устройство обеспечивает возможность срабатывания механизма управления при первом прикосновении щупа к стволу (штамбу) растения и после воздействия на четырехзвенный механизм управления отбрасывается в сторону. Большая скорость отбрасывания щупа обуславливает и его быстрое возвращение с помощью возвратной пружины в исходное положение еще до прохождения ствола (штамба) растения.
Недостаток устройства заключается в том, что оно обладает большой инерционностью, а щуп при резком возврате может ударять по стволу (штамбу), повреждая его. Кроме того, чувствительность устройства на практике трудно реализовать в полной мере, поскольку находящиеся в рядах насаждений сорняки своим соприкосновением с щупом могут вызвать ложное срабатывание.
Цель изобретения снижение возможности повреждения нежных растений самим отслежующим элементом, повышение чувствительности и точности срабатывания, повышение быстродействия и снижение инерционности отслеживающего элемента.
Указанная цель решена в заявляемом устройстве для обработки почвы в рядах многолетних насаждений, содержащем раму с установленным на ней по крайней мере одним вращающимся рабочим органом, выполненным в виде четырехлопастной крыльчатки с наклонной в вертикальной поперечной плоскости в сторону периферии осью вращения, механизм управления поворотом крыльчатки, выполненный в виде шарнирного четырехзвенника, ведомое коромысло которого взаимодействует с одной из лопастей крыльчатки, направленной к оси симметрии, а на ведущем коромысле закреплен направленный наружу горизонтальный рычажный спусковой элемент, один конец которого воспринимает внешнее усилие, а другой является ведущим коромыслом, при этом оси ведущего коромысла и шарниров, соединяющих шатун с ведущим и ведомым коромыслами, расположены на одной прямой линии с некоторым отклонением внутрь от этой линии центрального шарнира, снабженного ограничительным упором, в котором имеется выступающий за обрабатываемый ряд растений горизонтальный отслеживающий элемент, выполненный в виде двух расположенных последовательно по ходу обработки переднего и заднего отслеживающих препятствие рычагов (щупов), причем передний закреплен своим внутренним концом поворотно на вертикальной оси к раме и служит для первой встречи с препятствием (со стволом растения) и подготовки срабатывания механизма управления, свободный конец его взаимодействует с рядом растений, причем он кинематически связан шарнирной тягой с плечом заднего отслеживающего рычага, служащего для запуска срабатывания механизма и возврата переднего отслеживающего рычага в исходное положение, при этом задний отслеживающий рычаг снабжен жестко с ним связанным кулачком, выступ которого через подпружиненный толкатель кинематически связан с наружным плечом (концом) спускового элемента, причем направляющая толкателя выполнена подпружиненной с обращенного к кулачку конца односторонне в поперечном направлении, а с обращенного к спусковому элементу конца подпружинена возвратной пружиной в продольном направлении.
Целесообразно при этом, чтобы шарнирная опора одного из плеч спускового элемента была выполнена подпружиненной, тарированной на предельную механическую прочность, пружиной, а плечо снабжено дополнительным ограничивающим упором, служащим для выведения спускового элемента из запорного положения.
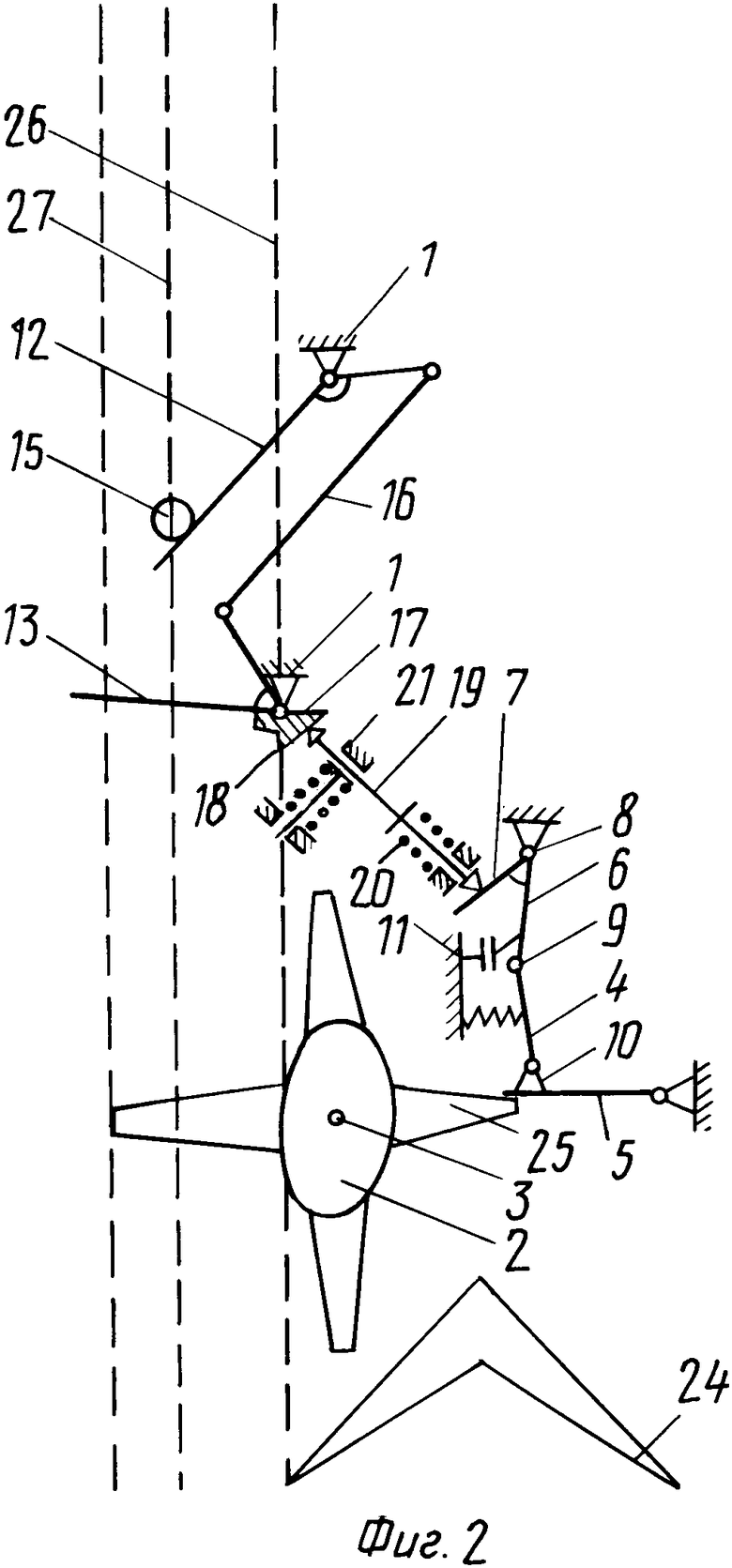
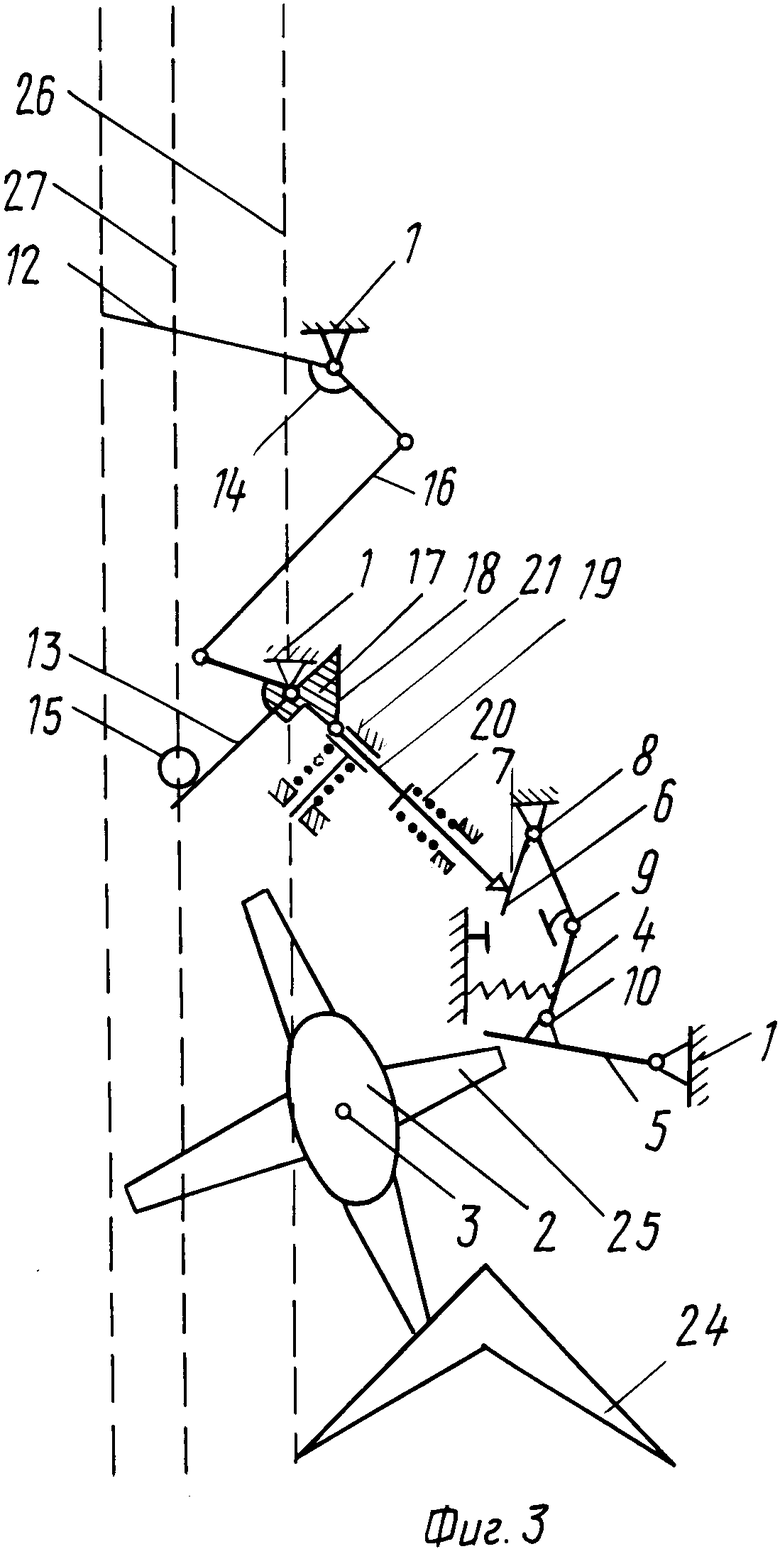
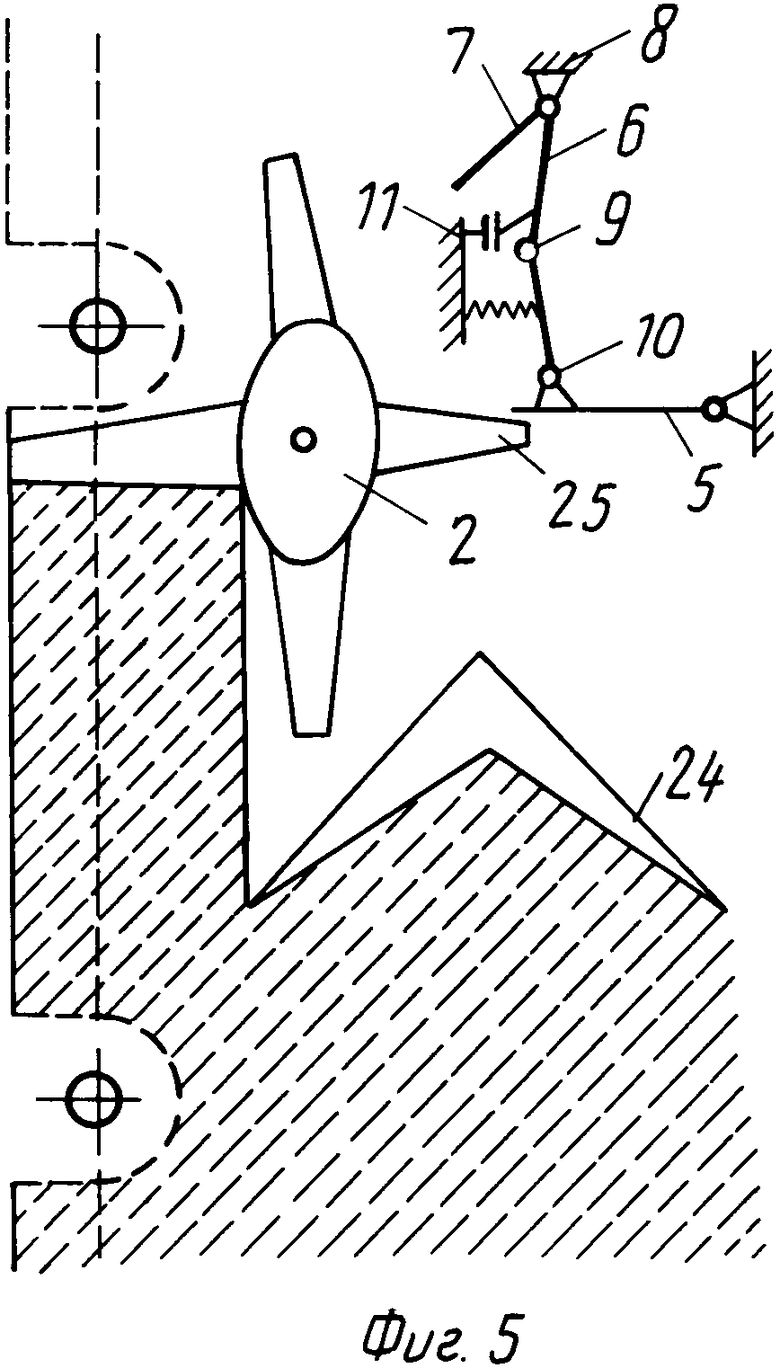
На фиг. 1 показано предлагаемое устройство, вид на кинематические связи в самом начале встречи с препятствием, рабочий орган застопорен; на фиг. 2 то же, дальнейшая фаза встречи, рабочий орган застопорен; на фиг. 3 фаза завершения встречи препятствия, рабочий орган начинает освобождаться от стопора; на фиг. 4 вид сбоку в разрезе по рабочему органу в застопоренном состоянии, лапа подрезает почву; на фиг. 5 отдельно показана кинематика работы исполнительного элемента стопорения рабочего органа, фаза лапы неподвижны, ведущий и ведомый рычаги в "мертвой точке"; на фиг. 6 кинематика исполнительного элемента стопорения рабочего органа, ведущий и ведомый рычаги вышли из "мертвой точки", лапа крыльчатки может поворачиваться.
Устройство состоит из рамы 1, условно показанной на чертежах, как точки опоры подвижных элементов, на которой закреплен вращающийся рабочий орган, выполненный в виде четырехлопастной крыльчатки 2 (например, ступицы с подрезающими лапами) с наклонной в вертикальной поперечной плоскости в сторону периферии осью 3 вращения. На раме 1 также закреплен механизм управления поворотом крыльчатки 2, выполненный в виде шарнирного четырехзвенника. Его ведомое коромысло 4 через упорный рычаг 5 взаимодействует с одной из лопастей крыльчатки 2, направленной к оси симметрии. Это взаимодействие выражается в том, что упорный рычаг 5 препятствует повороту крыльчатки 2. Ведущее коромысло 6 четырехзвенника имеет направленный наружу горизонтальный рычажный спусковой элемент 7, один конец которого воспринимает внешнее усилие, а другой является ведущим коромыслом 6. Оси ведущего коромысла 8 и шарниров 9 и 10, соединяющих упорный рычаг 5 с ведущим 6 и ведомым 4 коромыслами, расположены на одной прямой линии с некоторым отклонением внутрь от этой линии центрального шарнира 9, снабженного ограничительным упором 11. На раме имеется выступающий за обрабатываемый ряд растений горизонтальный отслеживающий элемент, выполненный в виде двух, расположенных последовательно по ходу обработки, переднего 12 и заднего 13 отслеживающих препятствие рычагов, причем передний рычаг 12 закреплен своим внутренним концом поворотно на вертикальной оси 14 к раме и служит для первой встречи с препятствием-стволом растения 15 и подготовки срабатывания механизма управления. Свободный конец рычага 12 взаимодействует с препятствием 15, причем он кинематически связан шарнирной тягой 16 с плечом заднего отслеживающего рычага 13, служащего для запуска срабатывания механизма и возврата переднего отслеживающего рычага 12 в исходное положение. Задний отслеживающий рычаг 13 снабжен жестко с ним связанным кулачком 17, выступ 18 которого через толкатель 19 с пружиной 20 кинематически связан с наружным плечом спускового элемента 7, причем направляющая 21 толкателя 19 выполнена подпружиненной с обращенного к кулачку 17 конца односторонне в поперечном направлении, а с обращенного к спусковому элементу 7 конца подпружинена возвратной пружиной 20. Ось ведущего коромысла 8 спускового элемента 7 выполнена подпружиненной таррированной на предельную механическую прочность пружиной 22, а плечо 7 снабжено дополнительным ограничивающим упором 23, служащим для выведения спускового элемента 7 из запорного положения и предотвращения поломки рабочего органа. На раме закреплен, кроме поворотного рабочего органа 2, неподвижный рабочий орган 24 в виде стрельчатой лапы, служащий для обработки почвы в междурядье.
Устройство работает следующим образом (см. фиг. 1-3).
При движении в междурядьях лапа рабочего органа 24 рыхлит почву в междурядьи, а лапы 25 крыльчатки 2 обрабатывают зону рядка. При контакте переднего отслеживающего рычага 12 со стволом растения он отклоняется в горизонтальной плоскости и через соединительную тягу 16 приводит в рабочее положение задний отслеживающий рычаг 13. При дальнейшем движении устройства задний отслеживающий рычаг 13 подходит к стволу растения 15 во взведенном состоянии и при контакте со стволом 15 он отклоняется в горизонтальной плоскости. При этом движении отслеживающего рычага 13 с одной стороны приводится в исходное положение через соединительную тягу 16 отслеживающий рычаг 12, а с другой кулачок 17 своим выступом 18 нажимает на конец толкателя 19. Последний скользит по направляющим 21, преодолевая усилие пружины 20 и воздействуя на плечо 7 ведущего коромысла 6, поворачивает его. При этом шарнир 9 проходит "мертвую точку". Под действием усилия давления лапы 25 на упорный рычаг 5, равного усилию сопротивления резанию почвы, шарнир 9 резко перемещается, система рычагов размыкается, освобождая лапу 25. Кулачок 17 при дальнейшем взаимодействии с толкателем 19 соскальзывает своим выступом 18 с конца последнего. Толкатель 19 под действием пружины 20, опирающейся на направляющую 22, возвращается в исходное положение. Под действием пружины 41 шарнир 9 снова проходит "мертвую точку" теперь в обратном направлении и доходит до упора 11 и спусковой элемент 7 занимает положение перед толкателем 19, а упорный рычаг 5 фиксируется в начальном запорном положении. При этом одна (следующая) из лап 25 крыльчатки 2 упирается в упорный рычаг 5, а другая заглубляется в почву в зоне ряда насаждений. В дальнейшем при встрече со следующим стволом (штамбом) 15 задний отслеживающий рычаг 13 взводит в рабочее положение передний отслеживающий рычаг 12. Система готова к встрече со следующим стволом (штамбом) 15. Процесс повторяется. На чертежах условно обозначена линия 26 захвата неподвижного рабочего органа 24 и линия 27 рядов насаждений.
Благодаря наличию двух отслеживающих рычагов 12 и 13 происходит плавное без рывков взведение элементов механизма, причем оно не связано с исполнительными его элементами. Это устраняет возможность ложного срабатывания, повышает надежность работы. Два отслеживающих рычага 12 и 13 в равной степени подвергаются внешнему воздействию зарослей сорной растительности, причем давление на передний отслеживающий рычаг 12 компенсируется таким же давлением сорной растительности на задний отслеживающий рычаг 13.
Таким образом, обеспечивается дифференциальная система подавления помех, которыми можно считать наличие густых зарослей сорняков.
Устройство обеспечивает плавное скольжение отслеживающих рычагов 12 и 13 по стволу (штамбу) растения.
Большая надежность работы, малая инерционность позволяет в 3-4 раза увеличить скорость обработки почвы, а следовательно, и производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки почвы в рядах многолетних насаждений | 1980 |
|
SU895300A1 |
| Устройство для обработки почвы в рядах растений | 1981 |
|
SU988209A1 |
| Рабочий орган для обработки почвы в рядах многолетних насаждений | 1985 |
|
SU1375150A1 |
| Почвообрабатывающее орудие | 1990 |
|
SU1792235A3 |
| ПНЕВМАТИЧЕСКОЕ ОРУЖИЕ | 1992 |
|
RU2024817C1 |
| Устройство для обработки почвы в рядах растений | 1990 |
|
SU1792234A3 |
| Гидроавтоматическое следящее устройство | 1985 |
|
SU1336962A1 |
| ФРОНТАЛЬНЫЙ ФРЕЗЕРНЫЙ КУЛЬТИВАТОР МЕЖДУКУСТОВОЙ ОБРАБОТКИ ВИНОГРАДНИКОВ | 2011 |
|
RU2471322C1 |
| Гидромеханическое устройство для междурядной обработки почвы в рядах многолетних насаждений | 1991 |
|
SU1793829A3 |
| Устройство для обработки почвы в рядах многолетних насаждений | 1985 |
|
SU1436900A1 |



Применение: в машинах для обработки почвы в рядах растений. Сущность изобретения: устройство для обработки почвы содержит смонтированный на раме по крайней мере один подрезающий орган, установленный с возможностью вращения вокруг оси, средство слежения и шарнирно-рычажный механизм управления поворотом рабочего органа по сигналу от средства слежения. Средство слежения выполнено в виде установленных с возможностью поворота в горизонтальной плоскости кинематически связанных между собой переднего и заднего рычагов. Задний рычаг посредством подпружиненно установленного толкателя связан с пусковым рычагом механизма управления поворотом рабочего органа. 1 з.п. ф-лы, 6 ил.
| Устройство для обработки почвы в рядах многолетних насаждений | 1980 |
|
SU895300A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
