Изобретение относится к гидроакустическим устройствам и предназначено для поиска и распознавания донных, придонных и заиленных тел (объектов).
В гидроакустике проблема поиска, обнаружения и распознавания донных и придонных объектов решается с применением гидролокаторов обзора донной поверхности и, в частности, с помощью гидролокаторов бокового обзора (ГБО). Благодаря разработке ГБО с высокой разрешающей способностью стало возможным получать высококачественные гидролокационные изображения (ГЛИ) донной поверхности и объектов поиска.
В традиционных ГБО используются линейные антенны и распознавание объектов осуществляется по их "тенеграфическому" изображению и "тонкой структуре" эхосигналов, т.е. используется лишь амплитудно-частотная характеристика объекта для его дистанционной диагностики. Вместе с тем фазочастотная характеристика (ФЧХ) объекта обладает большой информативностью, но обычно не используется из-за трудностей ее получения.
В предлагаемом изобретении пошли по пути использования в ГБО параметрической антенны (ПА), основанной на эффекте нелинейного взаимодействия в воде мощных акустических волн с образованием волн разностных частот. ПА обладает рядом положительных свойств: высокой направленностью излучения на низких (разностных) частотах при относительно малых габаритах и массе исходного излучателя, практически полном отсутствии боковых лепестков характеристики направленности (ХН), большой широкополосностью, постоянством ХН в широком диапазоне частот. Возникновение в ПА гармоник волн разностной частоты (ВРЧ) при излучении мощного импульсного амплитудно-модулированного колебания (АМК) позволило использовать ФЧХ объектов, обладающих большой информативностью об акустической "жесткости" (импедансе) последних. Наряду с традиционным высокочастотным трактом излучения и приема использование низкочастотных приемных трактов для гармоник ВРЧ позволило получить дополнительные признаки по акустической "жесткости" объектов и повысило вероятность выделения среди всех обнаруженных объектов лишь искусственных.
Известен ряд устройств для определения характеристик и дистанционной классификации подводных объектов (ПО) с использованием ФЧХ. Применение обычных линейных антенн в устройствах подобного типа связано с рядом недостатков: излучающий преобразователь должен быть весьма широкополосным (не менее октавы), генераторные блоки должны иметь идентичные ФЧХ, кроме того, в результате неоднородностей в воде нарушается фазовый синхронизм излучаемых сигналов.
Эти недостатки устраняются при использовании ПА в режиме излучения гармоник. В этом случае излучается импульс с частотой заполнения fo. В результате нелинейности среды при достаточной мощности акустического сигнала происходит искажение его формы от гармонической почти до пилообразной, т.е. в среде формируются гармоники 2fо, 3fo, связанные по фазе с основной частотой (ϕ2 2 ϕ, ϕ3 3 ϕ,). Такой многочастотный сигнал отражается от объекта, имеющего передаточную функцию К(j ω) и акустическое сопротивление Z(j ω). Первая и вторая гармоники этого сигнала используются для определения разности фаз (фазового инварианта) на частоте 2fo, т.е. значения ФЧХ на частоте 2fo.
К недостаткам этого способа и устройства следует отнести то, что приемный акустический преобразователь должен быть весьма широкополосным (не менее октавы), что непросто выполнить на высоких частотах, или необходимо использовать два преобразователя с резонансными частотами foи 2fo соответственно. Кроме того, высокие частоты не проникают в толщу грунта и объекта, а потому не могут быть использованы для поиска заиленных объектов, а для донных и придонных объектов потому не несут информации о их внутренней структуре (да и далеки от резонанса оболочек).
Известен гидролокатор бокового обзора, являющийся прототипом и содержащий последовательно соединенные передатчик и передающую антенну и последовательно соединенные приемную антенну, регулируемый усилитель, блок выделения цели и тени, блок управления и блок измерения признаков, состоящий из селектора, блоков определения длины, параллельности, прямолинейности, а также блок принятия решения, причем второй выход блока выделения цели и тени соединен с входом селектора, выход которого соединен со входами блоков определения длины, параллельности и прямолинейности, выходы которых соединены с соответствующими входами блока принятия решения, второй выход передатчика соединен со вторым входом блока управления, выход которого соединен с управляющим входом регулируемого усилителя, первый вход блока управления подключен к первому выходу блока выделения цели и тени.
Хотя этот известный ГБО эффективен для идентификации донных объектов цилиндрической формы по их "тенеграфическому" изображению, но вместе с тем, углубления дна также могут дать тень правильной конфигурации, что приводит к ложному распознаванию (ложной тревоге). Достоверность (вероятность) распознавания объектов иной формы и конфигурации низка. Такой ГБО практически не пригоден для обнаружения заиленных объектов. Но и для цилиндрических объектов их дальнейшую классификацию по фигуре, образуемой в поперечнике (круг, кольцо, многогранник и т.п.) провести невозможно. Необходимы дополнительные признаки.
Технический результат изобретения повышение достоверности обнаружения и распознавания донных, придонных и заиленных объектов.
Это достигается путем использования дополнительной информации об акустической "жесткости" объектов за счет измерения фазового инварианта бигармонических эхосигналов разностных частот при излучении сигналов с внутриимпульсной амплитудной модуляцией (т.е. фазосвязанных трехкомпонентных сигналов).
Технический результат достигается тем, что в гидролокатор бокового обзора, содержащий последовательно соединенные передатчик и приемно-передающую антенну, последовательно соединенные регулируемый усилитель ВЧ, селектор, блок выделения цели и тени, а также синхронизатор, регистратор, блоки протяженности, параллельности и прямолинейности, блок принятия решения, причем входы блоков протяженности, параллельности и прямолинейности подключены к выходу селектора, а выходы соответственно к первому, второму и третьему входам блока принятия решения, чей выход подключен ко второму входу регистратора, а к первому его входу подсоединен выход регулируемого усилителя ВЧ, второй выход передатчика соединен со входом синхронизатора, первый выход которого соединен с первым управляющим входом передатчика, а второй выход с управляющим входом регистратора, а второй выход с управляющим входом регулируемого усилителя ВЧ, введены развязывающее устройство, приемная НЧ антенна, регулируемый усилитель ВРЧ, первый и второй избирательные усилители ВРЧ, удвоитель частоты, фазовращатель, фазовый детектор и индикатор, причем развязывающее устройство включено последовательно между приемно-передающей антенной и регулируемым усилителем ВЧ, приемная антенна НЧ подсоединена ко входу регулируемого усилителя ВРЧ, первый управляющий вход которого соединен со вторым выходом синхронизатора, а второй вход со вторым выходом блока выделения цели и тени, а выход с входами первого и второго избирательных усилителей ВРЧ, а также с первым входом индикатора, выходы первого и второго избирательных усилителей ВРЧ соединены соответственно через удвоитель частоты и фазовращатель с первым и вторым входами фазового детектора, чей выход подключен ко второму входу индикатора, управляющий вход которого соединен с первым выходом синхронизатора, третий выход последнего подключен ко второму управляющему входу передатчика.
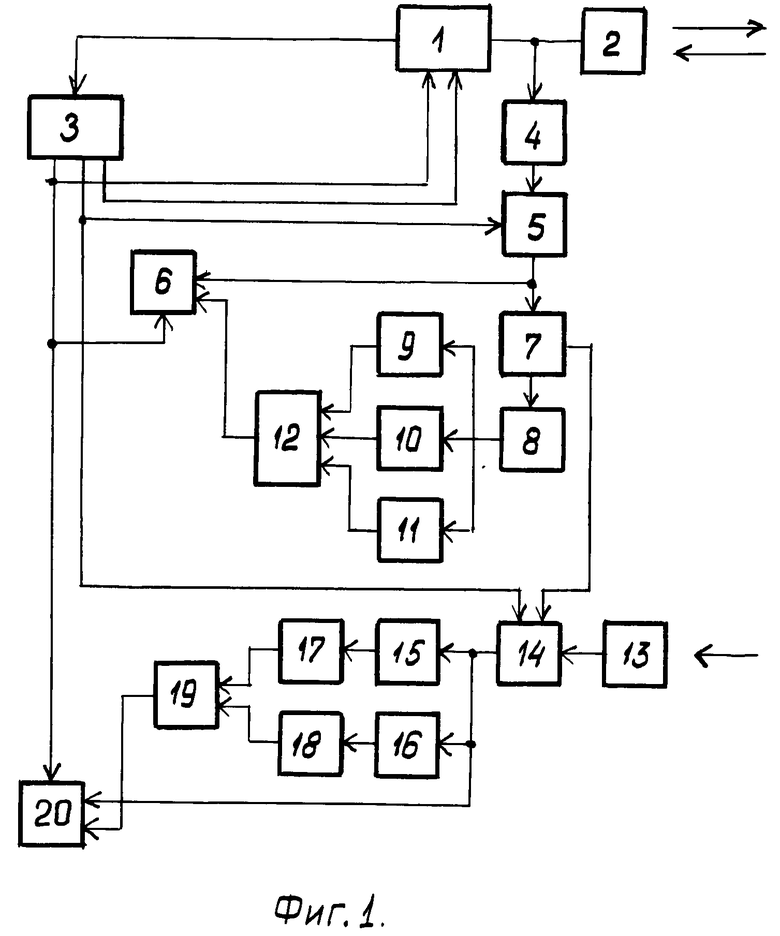
На фиг. 1 дана структурная схема предлагаемого гидролокатора, на фиг. 2-5 структурные схемы отдельных его блоков: фиг. 2 передатчика, фиг. 3 регулируемого усилителя высокой частоты (ВЧ), фиг. 4 регулируемого усилителя волн разностных частот (ВРЧ), фиг. 5 синхронизатора.
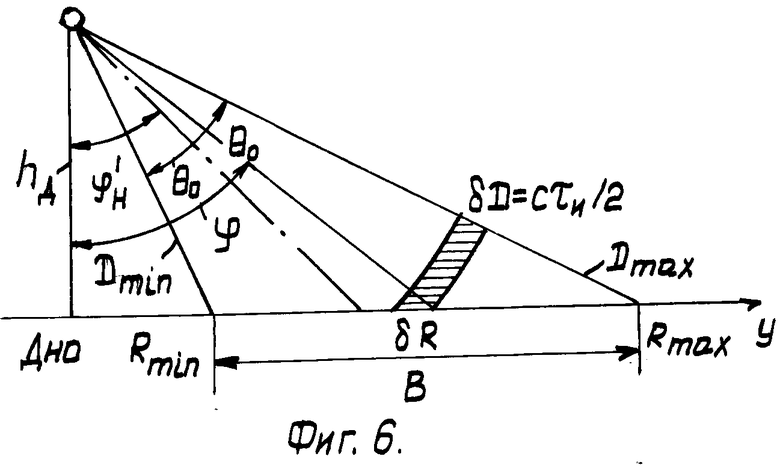
На фиг. 6 даны некоторые параметры бокового обзора.
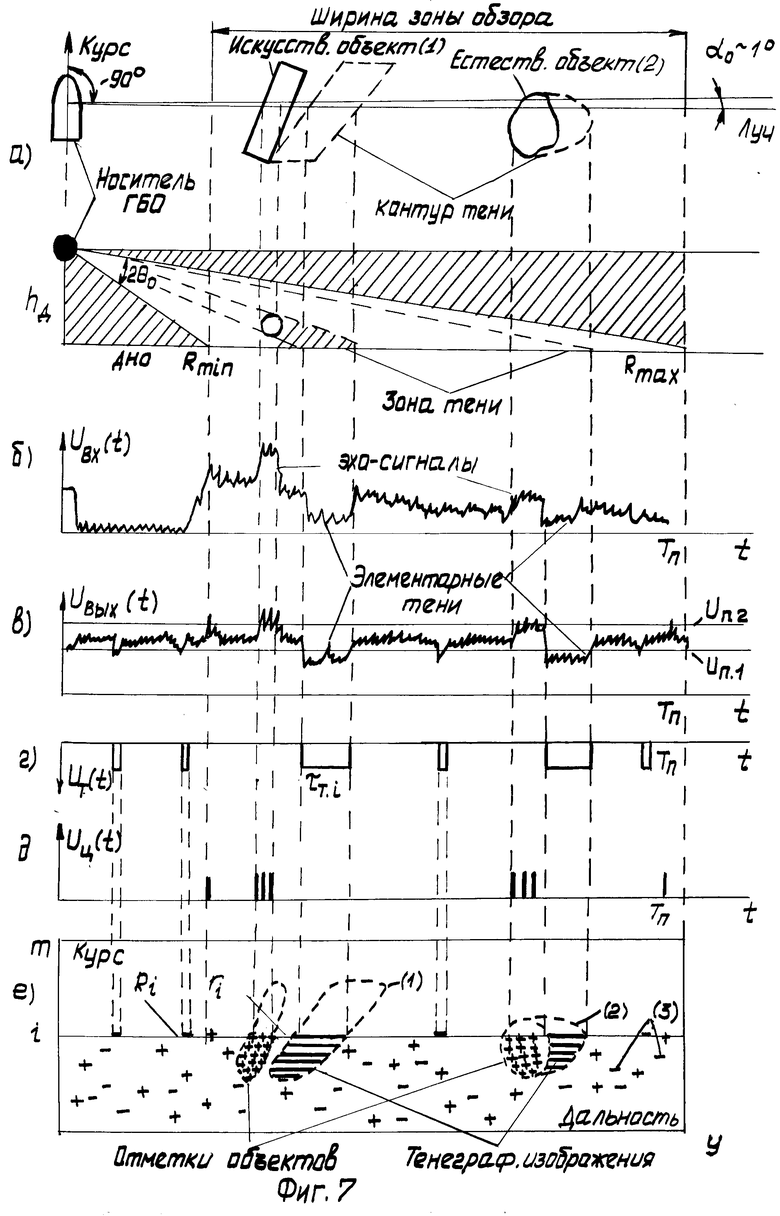
На фиг. 7 диаграммы:
а) поясняющие принцип бокового обзора и формирования акустически освещенной зоны объектов и зоны акустической тени за объектами;
б) огибающей входного сигнала с участками эхосигналов и элементарных теней;
в) стационаризированного сигнала на выходе регулируемого усилителя высокой частоты 5.
г) и д) напряжения на первом и втором выходах блока выделения цели и тени 6;
е) трехградационного изображения дна и объектов искусственного протяженного (1) и естественного (2).
Фазовый параметрический гидролокатор бокового обзора (ФП ГБО) (фиг. 1), содержит передатчик 1, приемопередающую антенну 2, синхронизатор 3, развязывающее устройство 4,регулируемый усилитель высокой частоты 5, регистратор 6, блок выделения цели и тени 7, селектор 8, блок протяженности 9, блок параллельности 10, блок прямолинейности 11, блок принятия решения 12, приемную низкочастотную антенну 13, регулируемый усилитель волн разностных частот (ВРЧ) 14, первый и второй избирательные усилители ВРЧ 15 и 16, удвоитель частоты 17, фазовращатель 18, фазовый детектор 19, индикатор 20.
Первый выход передатчика 1 соединен с приемопередающей антенной 2, которая, в свою очередь, подключена через развязывающее устройство 4 ко входу регулируемого усилителя ВЧ 5, чей выход соединен с первым входом регистратора 6 и входом блока выделения цели и тени 7. Второй выход передатчика 1 подключен ко входу синхронизатора 3, первый выход которого соединен с первым управляющим входом передатчика 1, управляющим входом регистратора 6 и управляющим входом индикатора 20, второй выход с управляющими входами регулируемых усилителей 5 и 14, а третий выход со вторым управляющим входом передатчика 1. Первый выход блока выделения цели и тени 7 соединен со входом селектора 8, а второй выход со вторым управляющим входом регулируемого усилителя 14. Выход селектора 8 соединен со входом каждого из блоков 9-11, а их выходы подключены соответственно к первому, второму и третьему входам блока принятия решения 12, выход которого подключен ко второму входу регистратора 6. Вход регулируемого усилителя 14 соединен с приемной НЧ антенной 13, а выход с входами первого и второго усилителей ВРЧ 15 и 16, а также с первым входом индикатора 20. Выход первого усилителя ВРЧ 15 соединен через удвоитель частоты 17 с первым входом фазового детектора 19, второй вход которого подключен через фазовращатель 18 к выходу второго усилителя 18. Выход фазового детектора 19 подключен ко второму входу индикатора 20.
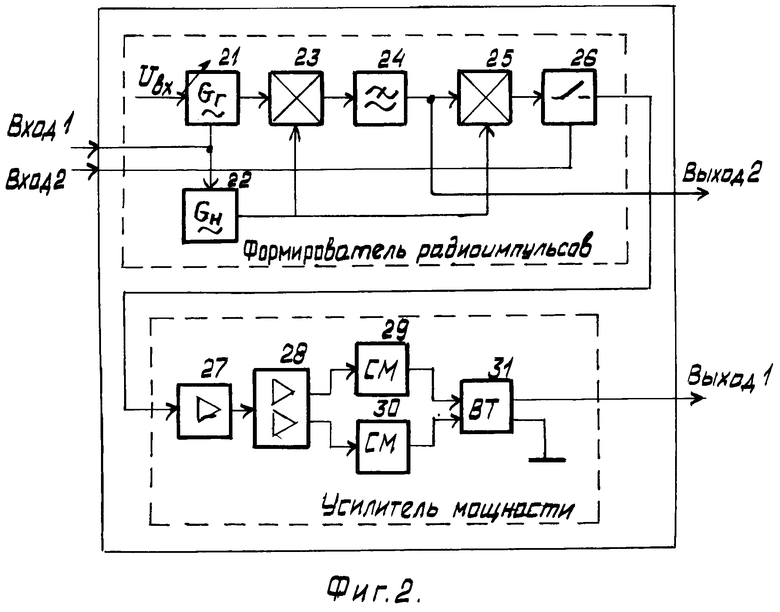
Передатчик 1 (фиг. 2) содержит первый и второй синхронизированные генераторы гармонических колебаний 21 и 22, последовательно соединенные первый перемножитель сигналов 23, фильтр нижних частот (ФНЧ) 24, второй перемножитель сигналов 25, электронный ключ 26, усилитель 27, парафазный усилитель (фазоинвеpтоp) 28, силовые модули 29 и 30, а также выходной трансформатор 31, при этом выходы генераторов 21 и 22 подключены соответственно к первому и второму входам первого перемножителя сигналов 23, а выход генератора 22 подключен также ко второму входу перемножителя сигналов 25. Управляющие входы генераторов 21 и 22 соединены между собой и являются первым входом передатчика 1 управляющий вход электронного ключа 26 служит вторым входом передатчика 1. Вход усилителя 27 соединен с выходом электронного ключа 26, а выход со входом парафазного усилителя 28, первый и второй выходы которого подключены соответственно через силовые модули 29 и 30 ко входам первичной обмотки выходного трансформатора 31, вторичная обмотка которого является первым выходом передатчика 1, а его вторым выходом служит выход ФНЧ 24.
Блоки 21-26 представляют собой формирователь радиоимпульса, а блоки 27-31 усилитель мощности.
Блоки 21 и 22 это генераторы гармонических колебаний с внешним запуском (от синхронизатора), выполненные по схеме транзисторных резонансных усилителей с положительной обратной связью. Первый и второй перемножители сигналов 23 и 25 выполнены на базе стандартных аналоговых перемножителей сигналов, например, интегральных микросхем К140МА1 или К525ПС1+3. ФНЧ 24 это распространенный низкочастотный RC-фильтр. Электронный ключ 26 это стандартный аналоговый ключ, например, микросхема К176КТ1. Усилитель 27 выполнен на базе стандартного операционного усилителя (ОУ), например, на микросхеме К544УД2А. Парафазный усилитель 28 состоит из двух ОУ (К544УД2А), выходные напряжения которых сдвинуты по фазе на 180о. Силовые модули 29 и 30 это усилители на относительно мощных транзисторах (типа КТ847), работающие в классе В, т.е. с отсечкой коллекторного тока в 90о. Выходной трансформатор 31 выполнен как силовой дифференциальный трансформатор с сердечником из карбонильного железа. Выводы первичной обмотки трансформатора подключены к выходам силовых модулей 29 и 30, а выводы вторичной обмотки к антенне 2, при этом индуктивность этой обмотки и статическая емкость антенны 2 образуют параллельный резонансный контур.
Приемо-передающая антенна 2 представляет собой прямоугольную антенную решетку со слабо выпуклой поверхностью (аппроксимирующей часть цилиндра), образованную из n плоских прямоугольных электроакустических преобразователей, расположенных в вертикальной плоскости под углом друг к другу, равном ширине характеристики направленности отдельного преобразователя. С одной стороны преобразователи приклеены к дюралюминиевому корпусу, а с другой стороны они залиты звукопрозрачным компаундом.
В действующем макете ФП ГБО антенна 2 состоит из четырех пьезокерамических преобразователей с резонансной частотой (равной fн) 300 кГц. ХН антенны как на частотных накачки, так и на разностных частотах (в диапазоне от 10 до 40 кГц) составляет: в вертикальной плоскости 36о, в горизонтальной плоскости 0,7о. Эквивалентная емкость и активное сопротивление в параллельной схеме замещения соответственно равны 20 нФ и 10 Ом. Габаритные размеры 500х240х55 мм, масса 8 кг.
Развязывающее устройство 4 выполнено по схеме последовательного соединения резистора и двух диодов; причем диоды включены встречно-параллельно и являются выходом устройства.
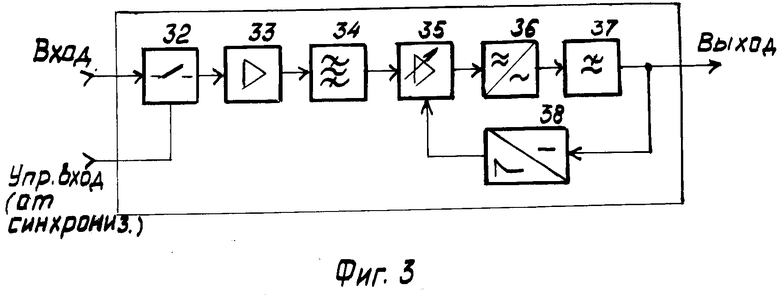
Регулируемый усилитель высокой частоты 5 (фиг. 3) содержит последовательно соединенные электронный ключ 32, предварительный широкополосный усилитель 33, полосовой фильтр 34, регулируемый усилитель 35, амплитудный детектор 36, фильтр нижних частот 37, формирователь текущего среднего 37; при этом выход блока 38 подключен к управляющему входу регулируемого усилителя 35, а управляющий вход ключа 32, являющийся управляющим входом всего регулируемого усилителя ВЧ 5, подключен ко второму выходу синхронизатора 3, входом и выходом усилителя 5 служат соответственно вход электронного ключа 32 и выход фильтра нижних частот 37.
Блоки 32, 33 и 37 выполнены идентично соответственно блокам 26, 27 и 24. Полосовой фильтр 34 представляет собой резонансный усилитель на транзисторе (КТ3102). Амплитудный детектор 36 выполнен по схеме диодного детектора. Формирователь текущего среднего 38 это двухкаскадный усилитель постоянного тока на базе операционных усилителей К544УД1.
Регистратор 6 это индикатор телевизионного типа с растровой разверткой (или самописец с лентопротяжным устройством и растровой записью просматриваемой полосы обзора).
Блок выделения цели и тени 7 состоит из двух однопороговых компараторов (микросхемы К544СА3А). Первый компаратор предназначен для выделения сигнала тени, второй сигнала цели. Инвертирующий вход первого компаратора и неинвертирующий вход второго компаратора соединены между собой и являются входом блока 7, первым и вторым выходами этого блока служат соответственно выходы первого и второго компараторов. К неинвертирующему входу первого компаратора подводится пороговое напряжение Uп.1, а к инвертирующему входу второго компаратора Uп.2(фиг. 7, в). Алгоритм функционирования компараторов определяется формулами (5) и (6) (см. далее).
Селектор 8 выполнен согласно а.с. N 734750.
Блоки 9-12, алгоритм работы которых представлен соотношениями (8)-(14), выполнены на базе микропроцессора (1-8080 фирмы Intel, или К580, МП-К-25 и др.); описание микропроцессорного варианта блоков 9-12 и результаты испытаний известны.
В качестве приемной низкочастотной антенны 13 использован стандартный гидрофон типа 1П-2Г, имеющий рабочий диапазон частот от 0,5 Гц до 20 кГц и чувствительность 180, 150 и 120 мкВ/Па соответственно на частотах 2, 10 и 20 кГц.
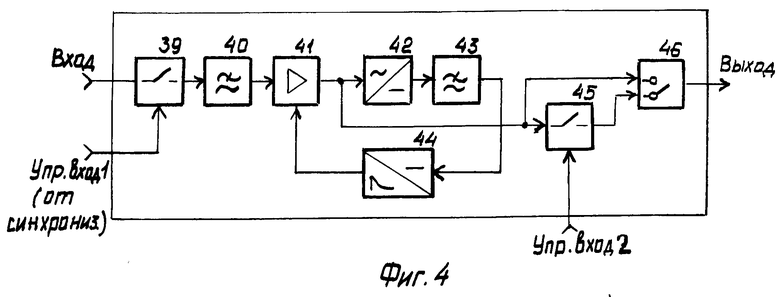
Регулируемый усилитель волн разностных частот (ВРЧ) 14 содержит последовательно соединенные первый электронный ключ 39, первый фильтр нижних частот (ФНЧ) 40, регулируемый усилитель 41, амплитудный детектор 42, второй ФНЧ 43, формирователь текущего среднего 44, а также второй электронный ключ 45 и переключатель 46, при этом выход формирователя 44 соединен с управляющим входом регулируемого усилителя 41, выход которого подключен не только ко входу амплитудного детектора 42, но и ко входу второго электронного ключа 45 и к первому входу переключателя 46, ко второму входу переключателя 46 подсоединен выход второго электронного ключа 45, управляющий вход которого является вторым управляющим входом усилителя 14 и соединен со вторым выходом блока выделения цели и тени 7. Входом, первым управляющим входом и выходом регулируемого усилителя 14 служат соответственно вход и управляющий вход первого электронного ключа 39 и выход переключателя 46.
Блоки 39, 40, 41, 42 и 44 выполнены аналогично соответствующим блокам 32, 37, 35, 36 и 44. Блоки 43 и 45 идентичны блокам 40 и 39. Переключатель 46 выполнен в виде клавишного переключателя типа П2К.
Первый и второй избирательные усилители ВРЧ 15 и 16 построены по одной схеме (и имеют максимум усиления соответственно на частотах F и 2F), содержащей двухкаскадное соединение ОУ (К544УД1А) с параллельными связанными контурами при критической связи контуров, что обеспечивает хорошее подавление ("развязку") сигналов по соседнему каналу усиления.
Удвоитель частоты 17 собран по схеме аналогового перемножителя сигналов (микросхемы К525ПС1-3 или К140МА1), оба входа которого соединены между собой и служат входом блока.
В качестве фазовращателя 18 использован широкополосный резонансный усилитель на базе ОУ (К544УД1А) с плавной перестройкой резонансной частоты контура, на который нагружен ОУ.
Блок 19 может быть реализован по любой типовой схеме фазового детектора с линейной характеристикой детектирования.
Индикатор 20 осциллограф, цветной дисплей или самописец.
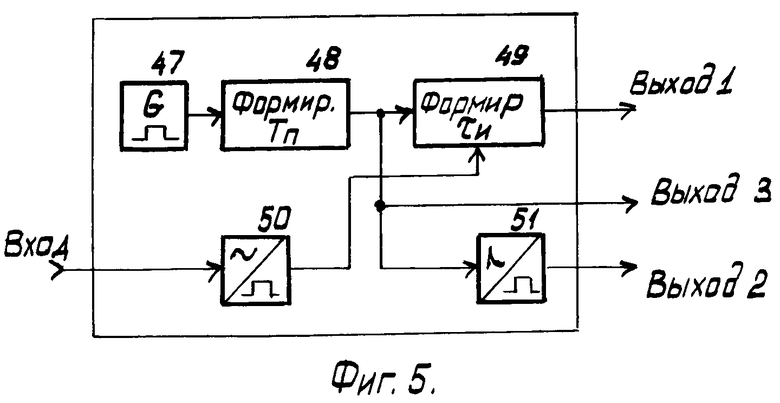
Синхронизатор 3 (фиг. 5) содержит последовательно соединенные релаксационный низкочастотный генератор 47, формирователь периода зондирующих импульсов (Тп) 48, формирователь зондирующего видеоимпульса (τи) 49, а также преобразователь гармонического колебания в прямоугольное 50 и формирователь строб-импульса 51; при этом входом синхронизатора 3 служит вход преобразователя 50, выход которого подсоединен к управляющему входу формирователя 49, выход которого является первым выходом синхронизатора 3, выход формирователя 48, являющийся третьим выходом синхронизатора 3, подсоединен не только ко входу формирователя 49, но и формирователя строб-импульса 51, выход которого служит вторым выходом синхронизатора 3.
Релаксационный НЧ генератор 47 выполнен как мультивибратор на микросхеме 1006ВИ1. Формирователь периода зондирующих импульсов 48 выполнен на счетчиках К176Е8. Формирователь зондирующего видеоимпульса 49 выполнен как счетчик заданного числа полупериодов ВРЧ на стандартной микросхеме (например, серии К561ИЕ10). Преобразователь гармонического колебания в прямоугольное 8 выполнен как однопороговый компаратор на микросхеме К544СА3А. Формирователь строб-импульса 51 это ждущий мультивибратор с регулируемой длительностью на стандартной микросхеме (например, серии К561ИЕ10).
В основу работы ФП ГБО, предназначенного для обнаружения и дистанционной классификации донных, придонных и заиленных объектов по их тенеграфическим изображениям, амплитудно-частотным и фазочастотным характеристикам, положен способ исследования подводного объекта (ПО) с помощью импульсных трехкомпонентных фазосвязанных сигналов большой мощности. Особенностью предлагаемого ФП ГБО является то, что формирование фазосвязанных сигналов осуществляется путем возбуждения излучателя импульсным сигналом с внутриимпульсной амплитудной модуляцией колебаний; при этом в результате нелинейного взаимодействия трех компонент АМК в воде формируются колебания с комбинационными частотами, в том числе, волны разностной (низкой) частоты (ВРЧ).
Заключение о свойствах ПО и их классификация осуществляются как в традиционном ВЧ приемном тракте, так и в дополнительно введенном НЧ приемном тракте. В ВЧ тракте по "тенеграфическому" изображению можно выделить класс протяженных искусственных объектов от класса естественных (локальных) неоднородностей дна (камней, гряд, карчей и т.п.). Затем с использованием признаков эхосигнала и тени можно разделить протяженные объекты на донные и придонные, а далее по информативным признакам "тонкой" структуры эхосигнала, например, количеству "блестящих точек", они могут быть разделены по фигуре, образуемой в поперечном сечении (круг, многогранник и т.д.). В НЧ тракте на основе амплитудной и фазовой структуры эхосигнала ВРЧ осуществляется классификация обнаруженных объектов, включая заиленные, по их акустической жесткости, которая взаимосвязана как с материалом ПО, так и его внутренней структурой. Заметим, что в традиционных ГБО, предназначенных для поисковых работ и имеющих излучаемые частоты свыше 100 кГц, обнаружение заиленных объектов невозможно.
Предлагаемый гидролокатор работает следующим образом.
Высокочастотный тракт в целом функционирует как и в прототипе. Передатчик 1 формирует импульсный сигнал с требуемыми параметрами, который подается на приемопередающую антенну 2, характеристика направленности (ХН) которой ориентирована перпендикулярно направлению движения носителя гидролокатора и имеет большую ширину в вертикальной плоскости (2θo30 60о) и весьма малую ширину в горизонтальной плоскости (2 αo 0,5 1,5о).
Ширина В "озвученной" зоны два, иначе зоны обзора, определяется соотношением (фиг. 6):
В= Rmax Rmin Dmax ˙ sin ϕmax
Dmin sin ϕmin hд (tg ϕmax tg ϕmin,
(1) где ϕmax=ϕн+θo,ϕmin=ϕн-θo;θo и ϕн полуширина ХН антенны и ее угол наклона в вертикальной плоскости, hд отстояние антенны от дна.
Входной гидроакустический сигнал, представляющий собой смесь шума, объемной реверберации обратного рассеяния на неоднородностях "озвучиваемого" объема воды, донной реверберации рассеяния донной поверхности в обратном направлении (т. е. в сторону антенны 2) и эхосигнала от подводного объекта (ПО) или локальной неоднородности дна, преобразуется в антенне 2 в электрический сигнал и поступает через развязывающее устройство 4 в регулируемый усилитель ВЧ 5. На время излучения зондирующего импульса входное сопротивление развязывающего устройства 4 на несколько порядков уменьшается, что ограничивает амплитуду поступающего на вход усилителя 5 зондирующего импульса с передатчика 1, тем самым защищая усилитель от перегрузки. Для этой же цели дополнительно на управляющий вход усилителя 5 (упр. вход ключа 32 на фиг. 3) подается с синхронизатора 3 запирающий импульс на время излучения антенны 2.
Предварительное усиление и основная фильтрация эхосигналов происходит в блоках 33 и 34 усилителя 5 (фиг. 3), а в блоках 35-38 осуществляется быстрая автоматическая регулировка усиления (БАРУ), предназначенная для основного усиления и стационаризации (нормировки уровня) сигналов. Название этих блоков соответствует их функционированию. Отметим лишь, что блок 35, выполненный как парафазный усилитель, имеет малые нелинейные искажения; в качестве регулирующего элемента в нем использованы полевые транзисторы с управляющим р-n-переходом.
Следует отметить, что при боковом обзоре донная реверберация играет положительную роль, формируя так называемое "тенеграфическое" изображение ПО. При высокой разрешающей способности ГБО, когда элементы разрешения по дальности δ D (или δ R= δ/D(sin ϕ) и курсу δ Х меньше соответствующих размеров ПО, вслед за "освещенной" областью объекта возникает область акустической тени и "экранируется" соответствующий участок дна (фиг. 7, а). Для этой области интенсивность принимаемого сигнала Iпр уменьшается и определяется лишь интенсивностью шума Iш и объемной реверберации Io. Следовательно, в соответствующем участке огибающей U(t) входного сигнала образуется своеобразный провал импульс "элементарная тень" (фиг. 7,б). Длительность этого импульса определяется размерами объекта и его удалением, а амплитуда (глубина провала) отношением
Kт=  , (2) где Кт контрастность тени Э (по амплитуде). При Io > Iш
, (2) где Кт контрастность тени Э (по амплитуде). При Io > Iш
Kт≈  =Rд/Ro=Ko/D, (3) где Rд и Ro эффективные радиусы донной и объемной реверберации, Ко коэффициент пропорциональности. Следовательно, с ростом расстояния (времени с момента излучения) контрастность тени уменьшается.
=Rд/Ro=Ko/D, (3) где Rд и Ro эффективные радиусы донной и объемной реверберации, Ко коэффициент пропорциональности. Следовательно, с ростом расстояния (времени с момента излучения) контрастность тени уменьшается.
Что же касается контрастности эхосигнала, то при боковом обзоре она не зависит от расстояния
Kэ=  = Rэ/Rд так как интенсивности эхосигнала Iэ и донной реверберации Iд убывают с расстоянием (во времени) по одной и той же зависимости и определяются лишь соотношением их эффективных радиусов Rэ и Rд.
= Rэ/Rд так как интенсивности эхосигнала Iэ и донной реверберации Iд убывают с расстоянием (во времени) по одной и той же зависимости и определяются лишь соотношением их эффективных радиусов Rэ и Rд.
Сигналы с выхода усилителя 5 подаются на первый вход регистратора 6, в качестве которого чаще всего служит индикатор телевизионного типа, т.е. с растровой разверткой. В результате прямолинейного движения носителя ГБО просматривается полоса дна шириной В (фиг. 6 и 7, а) и на регистраторе получается детальное гидролокационное изображение (ГЛИ) дна и объектов поиска в прямоугольной системе координат; наклонная дальность D путевая дальность (курс) Х. Путем введения нелинейной развертки по дальности возможно формирование изображения в координатах: горизонтальная дальность R курс Х.
ГЛИ обладает спецификой. Так как ПО или локальные неоднородности дна, размеры которых превышают разрешающую способность ГБО, формируют более интенсивные сигналы, чем дно, то регистрируются они в виде более ярких отметок. За яркой отметкой следует так называемое "тенеграфическое" изображение, обусловленное зоной акустической тени за объектом. Временная (или быстрая) автоматическая регулировка усиления в блоке 5 позволяет получать постоянную яркость или цвет изображения однородного дна и ПО независимо от расстояния.
Размеры и форма ГЛИ объектов зависят от параметров объектов: размеров, формы, ракурса, дистанции и др. Следовательно, по ГЛИ можно решать обратную задачу гидролокации определить некоторые параметры объектов поиска. Особенно полезным является "тенеграфическое" изображение донных и придонных протяженных объектов, для автоматического распознавания которых предназначены блоки 7-12 ВЧ приемного тракта.
Сигналы с выхода усилителя 5 подаются также в блок выделения цели и тени 7, на первом выходе которого выделяются только сигналы тени (фиг. 7, г):
Uт(t)=  Uп.1 (5) а на втором выходе формируются сигналы цели (фиг. 7, д):
Uп.1 (5) а на втором выходе формируются сигналы цели (фиг. 7, д):
Uц(t)= (6)
(6)
В результате на первом выходе интересующая информация об элементарной тени представляется логическим напряжением (хордой), удобным для последующей цифровой обработки; при этом совокупность элементарных теней формирует растровое двухградационное "тенеграфическое" изображение (фиг. 7, е), в котором кроме изображения протяженного объекта (1) или локальной неоднородности дна (2) имеются помеховые хорды (3), обусловленные случайным характером отражения звука от подстилающей поверхности дна и его распространением в неоднородной среде.
В блоке 8 осуществляется селекция изображения конкретных объектов. В основу работы селектора 8 положен признак связности сигналов тени (хорд). Логическое условие связности (перекрытия) хорд в соседних строках (посылках) можно записать следующим образом:
Yк.i>Yн.i+1∧Yк.i+1>Yн.i, (7) где Yн.i., Yk.i координаты начала и конца хорды в i-й строке, Yн.i+1, Yk.i+1 то же в (i+1)-й строке, i=1,n. Последующие изображения селектируются аналогично, для чего селектор выполняется многоканальным.
В блоках 9-11 осуществляется измерение информативных признаков, характеризующих конфигурацию отселектированного тенеграфического изображения, и сравнение их с соответствующими порогами. Выбор той или иной группы признаков зависит как от сложности изображения, так и метода решения задачи автоматической классификации. В прототипе при поиске и распознавании донных протяженных объектов цилиндрической формы в качестве информативных признаков приняты: (8)
(8)
Вместо протяженности границ в блоке 9 измеряется число элементарных теней (хорд) n в контуре, т.е. число импульсов, укладывающихся на протяжении объекта вдоль курса, и сравнивается с порогом С1:
n > C1 (9)
Для оценки параллельности и прямолинейности границ в принципе необходимо и достаточно, чтобы так называемые антиперекрытия соседних хорд на ближней (Δб.i= Yб.i+1 Yб.i) и дальней (Δд.i+1 Yд.i+1 Yд.1) границах были равны и совпадали по знаку для всех хорд. В реальных условиях границы изображения искажены и тем сильнее, чем ниже контрастность изображения, т.е. меньше величина Кт. Следовательно, антиперекрытие Δi на какой-либо из границ определяется суммой
Δi= Δai+ζi, где Δ аi регулярная составляющая, зависящая от формы и ракурса объекта и равная константе для всех хорд интересующего класса объектов, ζi случайная составляющая. Поэтому необходима статистическая обработка координат хорд, для чего следует определить и запомнить текущие значения следующих величин:
i + 1, Δб.i, Δд.i, =
= 
 Δб.i,
Δб.i,  =
= 
 Δд.i (10)
Δд.i (10)
В блоке 10 производится проверка параллельности ближней и дальней границ контура тени по выполнению следующего условия -
- <c2 (11)
<c2 (11)
В блоке 11 осуществляется проверка прямолинейности соответствующих границ по выполнению условий:
 -
- <c3;
<c3; 
 -
- <c3 (12)
<c3 (12)
Пороговые значения С1-С3 устанавливаются исходя из требуемой вероятности обнаружения изображений объектов. Величина определяется протяженностью объекта, его ракурсом, а также скоростью носителя ГБО и разрешающей способностью в направлении курса δ Х; С1 допустимой непараллельностью границ контура тени, зависящей в основном от ракурса ПО; и, наконец С3 в основном уровнем реверберации и шума.
В блоке принятия решения 12 производится логическая операция "И" для трех сигналов, поступающих на три входа этого блока с выхода блоков 9-11. В случае, если все три входных напряжения равны напряжению логической единицы, то в блоке 12 формируется также напряжение логической единицы, которое означает, что распознаваемый объект имеет цилиндрическую форму. Сигнал с выхода блока 12 поступает на второй вход регистpатора 6.
В случае распознавания класса придонных объектов цилиндрической формы эффективность алгоритма, описываемого соотношениями (9)-(12) с фиксированными порогами С1, С2 и С3, оцениваемая как вероятность распознавания, в этом случае снижается и тем сильнее, чем больше отстояние от дна одного или, в более общем случае, обоих концов объекта. Это объясняется тем, что в контуре тени придонных цилиндрических объектов появляются характерные особенности: сокращается протяженность (L) проекции контура тени в направлении курса и, следовательно, число n; искривляются границы контура тени, возникает регулярная непараллельность этих границ; появляется отстояние (r) между ближней границей контура тени и дальней границей отметки эхосигнала (фиг. 7е).
Ранее рассмотренный алгоритм может быть усовершенствован за счет адаптации порогов С1-С3 путем учета текущих величин r1=ctч.i/2 и Ri ct3.i/2 (фиг. 7, е), т.е.
Cj' Cj Fj (i, Ri, ri), (13) где j=1,2,3; i=1,n.
Точные выражения для Fj(˙) весьма громоздки, в первом приближении они могут быть определены (14) где Δt
(14) где Δt 
 (tr.i-
(tr.i- ); tr
); tr
 tr.i, t3
tr.i, t3
 t3.i,
t3.i,
K1, K2, K3 некоторые константы; L n ˙ ΔX n ˙ Tn ˙ V-протяженность объекта в направлении курса; скорость носителя. В случае донных объектов Сj'= Cj, так как Fj 1 из-за Δ t 0 и  =0 (т.е.
=0 (т.е.  =0 и
=0 и  0).
0).
Условие
Fj (˙) > 1 (14')
свидетельствует о том, что цилиндрический объект является придонным.
Реализация алгоритмов (9)-(12) и (13)-(14') а, следовательно, блоков 9-11 соответственно для автоматического распо- знавания донных и придонных объектов цилиндрической формы наиболее гибко осуществляется на базе микропроцессора (МП), например, 1-8080А или К580. Результаты испытаний показали, что время селекции и идентификации 10 изображений, каждое из которых состояло в среднем из 40 хорд, не превышало 0,1 с; при этом объема памяти ПЗУ (512 байт) и ОЗУ (256 байт) было вполне достаточно; все устройство распознавания разместилось на плате размером 183х285 мм, а потребляемая мощность не превысила 1 Вт.
Для получения дополнительной информации о донных и придонных объектах, а также для возможности обнаружения и распознавания заиленных объектов введен низкочастотный приемный тракт, а передатчик выполнен по схеме, обеспечивающей формирование высокочастотного трехкомпонентного фазосвязанного импульсного сигнала, причем настолько мощного, что излучающая антенна 2 и область нелинейного взаимодействия компонент высокочастотного сигнала об разуют параметрическую антенну фазосвязанных волн разностных частот с высокими направленными свойствами.
Передатчик в соответствии со схемой, представленной на фиг. 2, функционирует следующим образом.
Генераторы 21 и 22 формируют гармонические колебания с частотами fги fн и работают в режиме синхронизации с частотой повторения импульсов от синхронизатора 3 (выход 2, фиг. 5): начальная нулевая фаза колебаний "навязывается" генератором в момент формирования переднего фронта зондирующего радиоимпульса (т.е. в момент поступления положительного перепада напряжения от синхронизатора на управляющие входы генераторов). Генератор 21 имеет дополнительный модуляционный вход Uвх, предназначенный для изменения частоты fг электронным способом. Изменяя напряжение на входе Uвх (и выбирая определенный режим перемножителя сигналов 23), можно получить радиоимпульс на выходе передатчика с требуемым спектральным составом.
В блоке 23 сигналы генераторов 21 и 22 перемножаются, в результате чего получаются гармонические колебания с суммарной ft fн + fг и разностной f- F fн fг частотами. Фильтр низких частот (ФНЧ) 24 выделяет на своем выходе только колебание разностной частоты F:U24(t) UΩ cos2 π F UΩ cos Ω t. Это колебание и смещение Uo подаются на первый вход перемножителя 25, а на второй поступает колебание с выхода генератора 22: U22(t) Uω cos2 π fн Uω cos ωн t. На выходе блока 25 формируется колебание:
U25 (t) K ˙ U24(t) ˙ U22(t) K (Uo +
+ UΩcosΩt)Uωcosωнt= U (1 +
+ M cos Ωt)cosωнt=Ucosωн t +
+ 0,5 M U cos (ωн-Ω) t + 0,5 М U cos
(ωн-Ω ) t, (15) где К коэффициент пропорциональности (определяемый типом перемножителя), U K ˙Uo˙Uω амплитуда несущего колебания, М UΩ/Uo -коэффициент модуляции. Очевидно, что величина М может изменяться в широких пределах регулировкой напряжения смещения Uo (ручка соответст- вующего потенциометра выведена на переднюю панель передатчика).
Итак, в перемножителе сигналов 25 формируется амплитудно-модулированное колебание (АМК) со спектральными составляющими (компонентами): fн, fн + F и fн F. Это АМК поступает в электронный ключ 26, который открывается только на время сигнала управления с выхода синхронизатора 3 (выход 1, фиг. 5). Тем самым из непрерывного АМК формируется радиоимпульс с определенной (заданной) длительностью τи и внутриимпульсной амплитудной модуляцией
Uвых.26 (t) U (1 + M cos Ω t) cos ωн t,
0 ≅t≅τи (16) при этом спектральные составляющие "жестко" связаны между собой по фазе и эта связь сохраняется от импульса к импульсу.
Сигнал вида (16) усиливается далее в блоках 27-31 до требуемого для заданной полосы обзора В уровня мощности. Усиление происходит в несколько этапов. Предварительное усиление до амплитуды 5 В происходит в усилителе 27, затем в парафазном усилителе 28, где на выходе получаются два симметричных сигнала, сдвинутых по фазе один относительно другого на 180о. В силовых модулях 29 и 30, работающих в режиме класса В с отсечкой коллекторного тока транзисторов в 90о, осуществляется окончательное усиление. Эти модули нагружены на первичную обмотку выходного трансформатора 31, вторичная обмотка которого является выходом передатчика 1 и имеет индуктивность, достаточную для образования параллельного резонанса со статической емкостью приемопередающей антенны 2.
Особенностью такого выполнения усиления мощности является малый уровень комбинационных низкочастотных паразитных составляющих (не хуже 50 дБ),а также возможность наращивания излучаемой мощности путем увеличения числа силовых модулей.
Усиленное колебание вида (16) излучается в воду антенной 2. При рассмотрении традиционных линейных антенн считается, что выполняется принцип суперпозиции (наложения) взаимодействующих в воде волн. В случае взаимодействия мощных акустических волн вода проявляет нелинейные свойства. Область взаимодействия этих волн представляет участок протяженностью lвз, обратно пропорциональный коэффициенту затухания β (lвз ≈ 1/β). Ширина взаимодействующих пучков волн определяется ХН исходных высокочастотных волн называемых волнами накачки. Таким образом, первичный электроакустический излучатель (антенна 2) и область взаимодействия представляет собой два основных элемента излучающей параметрической антенны (ПА).
Нелинейное взаимодействие в воде волн накачки с частотами fн, fн + F и fн F дает волны комбинационных частот fкомб ± К fн ± m (fн + F) ± n (fн + F), (17) где K, m и n натуральные числа: 0,1,2,3,
В первом приближении можно считать, что в воде генерируется вторые гармоники 2fн, 2(fн + F), 2(fн F), колебания суммарных частот 2fн F, 2fн, 2fн + F и волны разностных частот F и 2F. Вследствие степенной частотной зависимости затухания (β ≈ fk, где К=1-2) волны основных частот, гармоники и волны суммарных частот затухают быстрее, чем волны разностных частот (ВРЧ). Поэтому за пределами области взаимодействия lвзисходных волн будут распространяться в основном лишь ВРЧ и при этом на большие расстояния в силу малого затухания.
Итак, при возбуждении ПА трехкомпонентным сигналом вида (16) в воде формируется двухкомпонентный фазосвязанный сигнал ВРЧ:
S (t) S1 ˙cosΩ1 t + S2 cos Ω2 t. (18) где Ω1=Ω=2πF,Ω2=2π F2, F2 2F
При боковом обзоре антенна 2, как уже отмечалось, должна иметь весьма узкую ХН в горизонтальной плоскости (2 θ2 < 1о) и перекрывать широкий спектр обзора в вертикальной плоскости (2 θв >30о). Ширина ХН в соответствующей плоскости связана, как известно, с размером (апертурой) антенны l в этой плоскости и длиной волны λ C/fн. Для прямоугольной антенны полуширина ХН на уровне 0,707 определяется из соотношения
sin θ 0,44 λ/l 0,44 c/fн ˙ l (19)
Использование традиционного метода расширения ХН в вертикальной плоскости путем уменьшения апертуры преобразователя приводит к сн ижению площади преобразователя lв и, следовательно, излучаемой акустической мощности Ра:
Pa S ˙ Pу.д., Pуд < Рудmax так как удельная акустическая мощность (Руд) ограничена кавитацией или прочностными характеристиками материала преобразователя (Рудmax).
Поэтому для расширения ХН в вертикальной плоскости с сохранением или увеличением уровня излучаемой мощности антенну ФП ГБО делают в виде многоэлементных прямоугольных преобразователей. При этом соседние преобразователи ориентированы один относительно другого в вертикальной плоскости под углом, равным ширине ХН преобразователя, определяемым из соотношения (19). Таким образом, ширина ХН и, следовательно, сектора обзора в вертикальной плоскости всей решетки возрастает в n раз, т.е.
2 θв=n˙ 2 (arc sin 0,44 λ/lв), (20) где lв размер одного преобразователя в вертикальной плоскости.
Двухкомпонентный фазосвязанный сигнал (18) распространяется в среде и формирует эхосигнал
Sэ(t) Sэ.1cos[Ω (t 2D/C) + ϕo(Ω)] +
+ Sэ.2cos [2 Ω (t 2D/C) + ϕo (2 Ω)]
(21) где Sэ.1 и Sэ.2 амплитуды на частотах Ω и 2 Ω, зависящие от эффективной площади рассеяния (ЭПР), АЧХ объекта и расстояния D до него, ϕo (Ω ) и ϕo (2 Ω ) фазовые сдвиги при отражении на частотах Ω и 2 Ω, зависящие от акустической "жесткости" объекта.
Двухкомпонентный низкочастотный фазосвязанный сигнал вида (21) принимается низкочастотной антенной 13 и поступает в регулируемый усилитель ВРЧ 14. Блоки 39, 41-44 усилителя 14 (фиг. 4) функционируют аналогично соответствующим блокам 32, 35-38 регулируемого усилителя 5. ФНЧ 40 осуществляет подавление на 50-60 дБ высокочастотного сигнала, который может возникнуть на выходе антенны 13. Электронный ключ 45 стробирует усилитель, т.е. подключает сигнал на его выход лишь на интервал прихода эхосигнала. Стробирующий импульс на управляющий вход ключа 45 поступает со второго выхода блока выделения цели и тени 7 и формируется с приходом эхосигнала в усилитель ВЧ 5. С помощью механического переключателя 46 можно выбрать режим выхода усилителя ВРЧ: без стробирования и со стробированием.
Далее эхосигнал ВРЧ подается на избирательные усилители, настроенные соответственно на частоты F и 2F и далее на первый и второй входы фазового детектора 19 через удвоитель частоты 17 и фазовращатель 18. Фазовращатель 18 предусмотрен для компенсации возможных фазовых сдвигов между каналами усиления на частотах F и 2F. На выходе фазового детектора 19 формируется сигнал, амплитуда которого пропорциональна разности фаз между сигналами на его входе, т.е. с учетом (21) имеем
Uвых.19 ≈ Ψ=2ϕo(Ω)-ϕo (2 Ω ). (22)
Из (22) очевидно, величина Ψ не зависит от времени t, расстояния D, скорости звука С и центральной частоты накачки fн и называется фазовым инвариантом.
В случае акустически жестких объектов, акустический импеданс (Z) которых намного превышает импеданс воды (Zв= ρ C), отражение акустической волны происходит без изменения фазы, т.е. ϕo(Ω)=ϕo (2 Ω )= 0 и Ψ0,Uвых.19=0. При отражении от акустически мягких объектов (пузырей рыб и др.), для которых Z << Zв, происходит изменение фазы на 180о, т.е. ϕo(Ω)=ϕo (2 Ω ) 180o и Ψ360о 180о 180о, а Uвых.19= Um. Для реальных (упругих) объектов локации диапазон изменения Ψ составляет от 0 до 180о, (и Uвых.19) от 0 до Um).
Итак, величина сигнала с выхода фазового детектора, служащая оценкой фазового инварианта, является мерой "жесткости" подводного объекта и дает дополнительную информацию, направленную на повышение вероятности обнаружения и распознавания подводных объектов.
Сигнал с выхода фазового детектора 19 подается на индикатор 20 осциллограф, самописец или цветной дисплей. Соответствие градаций амплитуды сигнала и, следовательно, контраста или цвета отметки на индикаторе типу объекта устанавливается в ходе предварительных испытаний с известными типами (классами) объектов (включая грунты), т.е. в ходе предварительного "обучения распознаванию" в условиях полигона.
Синхронная работа всех блоков гидролокатора обеспечивается блоком 3, схема которого дана на фиг. 5. Он формирует сигнал синхронизации (выход блока 48) генераторов 21 и 22 формирователя радиоимпульсов (см. фиг. 2), обеспечивающий периодическую привязку фазы колебаний обоих генераторов в начале каждого периода зондирования; сигнал управления (выход блока 49) электронным ключом 26, обеспечивающий формирование радиоимпульса требуемой длительности; сигнал стробирования (выход блока 51), обеспечивающий запирание ВЧ- и НЧ-трактов усиления на время зондирующего сигнала. Кроме того, в синхронизаторе предусмотрена возможность регулировки пеpиода зондирования (Тп) и длительности излучаемого импульса (τи) с выводом информации о выбранных значениях на цифровой индикатор; при этом длительность импульса изменяется дискретно с шагом, равным половине периода ВРЧ, что осуществляется с помощью преобразователя 50.
Экспериментальные исследования макета ФП ГБО, проводимые как в бассейне (НЭТИ), так и натурных условиях Бухта Владимирская Ладожского озера), подтвердили возможность различения объектов локации по их акустической "жесткости".
Два канала (ВЧ и НЧ) позволили решать различные задачи исследования дна 1) локацию верхней кромки дна, донных и придонных объектов на частотах накачки; 2) локацию дна и донных слоев, а также заиленных объектов на разностных частотах (F и 2F).
Использование ПА в режиме АМК в отличие от режима излучения гармоник ВЧ (4,5) позволило: во-первых, отказаться от двух отдельных антенн для приема каждой из гармоник fo и 2fo; во-вторых, обеспечить надежность результатов благодаря таким особенностям ПА на низких частотах как высокая направленность, отсутствие боковых лепестков, частотно-независимая ширина ХН и др. Кроме того, этот режим позволяет определять ФЧХ отражения подводных объектов в широкой полосе частот, непрерывно сканируя частотной F, что невозможно в случае с использованием колебаний с частотами fo и 2fo.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| Имитатор сигналов гидролокатора бокового обзора | 1982 |
|
SU1176276A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ВЫТЕСНЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ОТ МОРСКОЙ НЕФТЕГАЗОВОЙ ПЛАТФОРМЫ | 2010 |
|
RU2434245C2 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛОТ | 1991 |
|
RU2011205C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛОКАТОР | 1989 |
|
RU1641102C |
| СПОСОБ ВЫСОКОНАПРАВЛЕННОГО ИЗЛУЧЕНИЯ И ПРИЕМА ШИРОКОПОЛОСНЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2247409C1 |
Использование: гидроакустические устройства, предназначенные для поиска и распознавания придонных, донных и заиленных объектов. Сущность изобретения: для повышения достоверности обнаружения и распознавания заиленных объектов, а также донных и придонных объектов за счет использования дополнительной информации об акустической "жесткости" объектов путем измерения фазового инварианта бигармонических сигналов с импульсной амплитудной модуляцией в известный гидролокатор бокового обзора, содержащий последовательно соединенные передатчик и приемно-передающую антенну, последовательно соединенные регулируемый усилитель ВЧ, селектор, блок выделения цели и тени, а также синхронизатор, регистратор, блоки протяженности, параллельности и прямолинейности, блок принятия решения, причем входы блоков протяженности, параллельности и прямолинейности подключены к выходу селектора, а выходы соответственно к первому, второму и третьему входам блока принятия решения, выход которого подключен к второму входу регистратора, а к первому его входу подсоединен выход регулируемого усилителя НЧ, второй выход передатчика соединен со входом синхронизации, первый выход которого соединен с первым управляющим входом передатчика, а второй выход управляющим входом регулируемого усилителя ВЧ, введены развязывающие устройства, приемная антенна, регулируемый усилитель разностных частот (ВРЧ), первый и второй избирательные усилители ВРЧ, удвоитель частоты, фазовращатель, фазовый детектор и индикатор, причем развязывающее устройство включено последовательно между приемо-передающей антенной и регулируемым усилителем ВЧ, приемная антенна НЧ соединена со входом регулируемого усилителя ВРЧ, первый управляющий вход которого соединен со вторым выходом синхронизации, а второй вход с вторым выходом блока выделения цели и тени, а выход с входами первого и второго избирательных усилителей ВРЧ, а также с первым входом индикатора, выходы первого и второго избирательных ВРЧ соединены соответственно через удвоитель частоты и фазовращатель с первым и вторым входами фазового детектора, выход которого подключен ко второму входу индикатора, управляющий вход которого соединен с первым выходом синхронизации, третий выход последнего соединен с вторым управляющим входом передатчика. 3 з.п. ф-лы, 7 ил.
| Новиков Б.К., тимошенко В.И | |||
| Параметрические антенны в активной гидролокации | |||
| Л.: судостроение, 1989, с.256. |
