Изобретение относится к устройствам эхо-импульсной локации и может быть использовано при обнаружении объектов, расположенных в различных средах в специфических условиях мелководья, на "свалах" глубин, вблизи протяженных препятствий и различных границ раздела. Преимущественная область использования - гидроакустика, рыболокация.
Гидроакустические системы ближнего действия (ГАС БД) находят широкое применение как на внутренних водных путях, так и на морском мелководье в связи с перспективным освоением морского шельфа. Структура гидролокатора ближнего действия (ГЛ БД) включает обычные для активной гидроакустической системы элементы. Известно гидроакустическое устройство, производящее излучение, прием и обработку звуковых сигналов с целью обнаружения, определения координат и характеристик движения отражающего звук объектов, находящихся в водной среде (см. Ультразвук. Маленькая энциклопедия. Глав. ред. И.П. Голямина. - М.: "Сов. энциклопедия", 1979, с. 81-83), содержащее в излучающем тракте синхронизатор и последовательно соединенные генератор, модулятор и усилитель мощности, которые через коммутатор соединен с приемно-излучающей "линейной" интерференционной антенной, а также в приемном тракте - приемный усилитель, блок слухового контроля, детектор, индикатор и регистратор.
Эта система имеет недостатки: 1) на морском шельфе поиск и обнаружение объектов о помощью указанных гидролокаторов практически невозможен, поскольку при горизонтальном лоцировании дно дает большое количество эхо-сигналов и в сочетании с донной и поверхностной реверберациями их уровень имеет значительно большую интенсивность, чем эхо-сигналы от малоразмерных объектов; 2) отрицательное влияние на работу ГЛ БД в мелководных районах оказывает наличие дополнительных максимумов диаграммы направленности (ДН) как излучающей, так и приемной интерференционных антенн, заключающееся, например, в возникновении большой ошибки в определении угловых координат объекта поиска; 3) использование интерференционных антенн в ГЛ БД существенно осложняет лоцирование на небольших удалениях и делает невозможным обнаружение объекта вблизи от излучателя вследствие значительности минимальной дальности действия ("мертвой" зоны) локационного устройства, что обусловлено как значительной протяженностью ближней зоны дифракции Френеля, так и маскирующим действием объемной реверберационной помехи, имеющей место уже в момент излучения зондирующего сигнала.
Для получения высокой разрешающей способности и увеличения эффективности обнаружения объектов в условиях мелководья в ГЛ БД используются сложные конструкции высоконаправленных интерференционных антенн с оптимальным распределением возбуждения ее элементов. Известен "Гидроакустический прибор для обнаружения подводных препятствий и определения их координат" в условиях мелководья (эхо-трал) по а. с. 187327 СССР, МКИ, G 01 C, G 08 F, опубл. 11.09.66, бюл. N 20, содержащий приемно-излучающую антенну с приводом для ее вращения, опускания и подъема, передатчик, приемник, индикатор, синхронизатор, блок питания и пульт управления, особенностью которого является использование специальной ("косекансной") приемно-излучающей антенной системы (АС), обеспечивающей формирование характеристики направленности (ХН) излучения с нижней границей, параллельной горизонту траления. Активный элемент АС состоит из металлической прямоугольной диафрагмы-накладки, имеющей ступенчатую излучающую поверхность, и двух пьезоэлементов, наклеенных на тыльную плоскую поверхность накладки. Конструкция накладки-диафрагмы достаточно сложна - состоит из 4-х прямоугольных элементов различных поперечных размеров, но двух одинаковых толщин, акустически развязанных друг от друга, и корпуса антенны, посредством проточенных по толщине накладки двухсторонних пазов. Это говорит о том, что "косекансная" приемно-излучающая система состоит из четырех преобразователей, имеющих различные пространственные характеристики излучения и работающих на двух резонансных частотах. Эта система имеет недостатки: 1) применительно для ГЛ БД использование оптимальных распределений возбуждения антенны (Чебышевское, Дольф-Чебышевское и др.) ограничено необходимостью разработки нетехнологичных конструкций малогабаритных многоэлементных преобразователей, значительностью рассеиваемой мощности уменьшенными, но имеющими место боковыми лепестками, а также искажением реальных ХН, т.е. увеличением бокового излучения вследствие амплитудных и фазовых разбросов в элементах антенны и каналах электронных трактов; 2) значительность минимальной дальности действия локационного устройства определяется маскирующим действием объемной реверберационной помехи.
Перспективным направлением проектирования и оптимизации ГЛ БД является использование параметрической антенны (ПА), что позволяет формировать направленное излучение локационного сигнала разностной частоты (СРЧ) F- = f2 - f1 практически без боковых лепестков при небольших размерах излучателей накачки и практически постоянной ширине основного максимума ХН. Отметим, что в данном случае значительно снижается маскирующее влияние объемной реверберации вследствие того, что излучение осуществляется на частотах f1 и f2 исходных волн накачки, а прием - на частотах используемых вторичных акустических сигналов, амплитуда звукового давления которых в непосредственной близости от излучателя невелика.
Известна "Система звуковой локации" по пат. США N 3763463, МКИ G 01 S 9/6, опубл. 1973, О.Б. N 43, содержащая два генератора, соединенные с ключом, усилитель мощности, коммутатор, усилитель, детектор, усилитель низкой частоты, индикатор, соединенные последовательно, а также излучатель и приемный преобразователь, соединенные с коммутатором. Сигналы двух частот с генераторов суммируются, стробируются ключом, усиливаются по мощности, через коммутатор подаются на преобразователь накачки, излучающий высокочастотные акустические сигналы f1, f2 в нелинейную водную среду. Отраженный от цели низкочастотный сигнал разностной частоты F- = f2 - f1 принимается приемным преобразователем и усиливается в усилителе, детектируется, усиливается усилителем низкой частоты и подается на индикатор.
Однако применение излучающих ПА в режиме генерации низкочастотных СРЧ в ГЛ БД ограничено рядом факторов: 1) область формирования ХН ПА, т.е. расстояние, на котором ширина ХН по уровню 0,7 для низкочастотного СРЧ изменяется в значительных пределах, достаточно велика и зависит от величины СРЧ, что обусловливает значительность озвучиваемого водного объема у исходного излучателя и приводит к увеличению "мертвой" зоны ГЛ вследствие маскирующего влияния объемной реверберации; 2) осуществление направленного приема отраженных СРЧ в ГЛ БД традиционными методами "линейной "акустики существенно увеличивает массогабаритные характеристики приемных антенн, а также обеспечивает наличие значительных боковых лепестковых (с уровнями ~ 20%), по которым производится прием переотраженных реверберационных, а также шумовых сигналов, что уменьшает отношение сигнал/шум на входе усилителя; 3) низкая эффективность генерации ПА низкочастотных СРЧ, причем предельное отношение энергии низкочастотного сигнала и энергии сигнала накачки не может быть больше отношения F-/f0, где (f0 = f1 + f2)/2 - центральная (резонансная) частота преобразователя накачки ПА; 4) значительность в низкочастотном диапазоне уровней собственных акустических шумов водоемов, а также звуковых колебаний, создаваемых различными механизмами, работающими как в воде, так и на берегу. Между тем при работе ПА наряду с генерацией СРЧ в водной среде формируется вторичное высокочастотное излучение - сигналы суммарной частоты (ССЧ) f+ = f2 + f1, вторые гармоники сигналов накачки 2f1,2, обладающие следующими характеристиками:
1) высокая эффективность генерации компонент вторичного высокочастотного излучения по сравнению с генерацией СРЧ;
2) малый уровень боковых лепестков в ХН;
3) повышенная (в 1,5 - 2 раза) направленность формирующегося вторичного высокочастотного излучения по сравнению с направленностью главного максимума преобразователя накачки на исходных частотах и на СРЧ F- = f2 - f1;
4) широкий диапазон частот вторичных акустических сигналов;
5) кратность частот и фазовая связь распространяющихся в водной среде вторичных 2f1,2 и первичных f1,2 акустических сигналов.
Использование данных сигналов в качестве локационных может быть перспективным при реализации режима прецизионной ближней локации, что обусловлено соответствием характеристик вторичных акустических полей специфике решаемых задач, причем направленный прием вторичных высокочастотных эхо-сигналов можно осуществить традиционным способом.
Наиболее близким к предлагаемому изобретению по структурной схеме и назначению является эхолот по пат. ФРГ N 3113261, МКИ G 01 S 15/60, опубл. в Б. И. N 6, 1983, имеющий наибольшее количество совпадающих признаков с заявляемым устройством и содержащий излучающий тракт: два генератора, соединенных через последовательно включенные хронизатор-модулятор и усилитель мощности с излучающим преобразователем накачки ПА, два приемных тракта: низкочастотный - приемный преобразователь акустических сигналов разностной частоты, соединенный через последовательно включенные полосовой фильтр, усилитель, детектор с первым входом индикатора, и высокочастотный - приемный преобразователь акустических сигналов суммарной частоты, соединенный через последовательно включенные полосовой фильтр, усилитель, детектор со вторым входом индикатора, третий вход которого соединен с дополнительным выходом хронизатора-модулятора. Сигналы с генераторов, разнесенные по частоте, поступают на входы хронизатора-модулятора, где суммируются и стробируются во времени. После хронизатора-модулятора радиоимпульсы усиливаются усилителем мощности и поступают на акустический преобразователь, излучающий в среду, обладающую нелинейностью, две исходные высокочастотные акустические волны с частотами f1 и f2. В среде происходит взаимодействие этих волн и образование вторичных акустических сигналов: низкочастотной волны разностной частоты F- = f2 - f1 (ВРЧ), имеющей направленность излучения, определяемую основным лепестком ДН акустического преобразователя для исходных волн накачки, высокочастотного излучения - сигнала суммарной частоты (ССЧ) f+ = f2 + f1, вторых гармоник сигналов накачки 2f1, 2f2. Данные сигналы достигают объекта, отражаются от него и распространяются в обратном направлении к точке излучения. Направленный прием отраженных сигналов разностной F- и суммарной f+ частот производится традиционным способом с помощью двух акустических преобразователей, электрические сигналы с которых после фильтрации, усиления и детектирования подаются на индикатор, на второй вход которого с дополнительного выхода хронизатора-модулятора поступают синхроимпульсы или другие управляющие сигналы. Эхолот имеет следующие преимущества по сравнению с описанными выше устройствами ближнего действия: 1) наличие дополнительного высокочастотного тракта не только оказывает помощь при обнаружении, например, придонных объектов, но и часто облегчает анализ и оценку показаний, расшифровку сомнительных записей на регистраторе и т.д.; 2) наличие высокочастотного тракта исключает необходимость использования на небольших дистанциях в качестве рабочего локационного сигнала разностной частоты (СРЧ).
Однако существенным недостатком описанного локационного устройства, проявляющемся при работе в специфических условиях мелководья на вторичных высокочастотных сигналах суммарной частоты f+, вторых гармоник 2f1,2 сигналов накачки, является то, что ДН приемного преобразователя указанных сигналов ("линейный" режим приема интерференционной антенной) имеет значительные боковые лепестки (с уровнями до 20%), по которым производится прием переотраженных, реверберационных и шумовых сигналов, а также эхо-импульсов от близлежащих границ раздела, что снижает точность пеленгования целей, уменьшает помехозащищенность системы, приводит к появлению "ложных" целей, увеличивает "мертвую" зону.
Задачей изобретения является повышение помехозащищенности и увеличение точности пеленгования целей с помощью предлагаемого параметрического импульсного локатора.
Для достижения необходимого технического результата в параметрический импульсный локатор, содержащий излучающий тракт: два генератора, соединенных через последовательно включенные хронизатор-модулятор и усилитель мощности с излучающим преобразователем накачки ПА, два приемных тракта: низкочастотный - приемный преобразователь акустических сигналов разностной частоты, соединенный через последовательно включенные фильтр, усилитель, детектор с первым входом индикатора, и высокочастотный - приемный преобразователь вторичных высокочастотных сигналов (суммарной f+ = f2 + f1; вторых гармоник 2f1,2), соединенный через последовательно включенные фильтр, усилитель, детектор со вторым входом индикатора, третий вход которого соединен с дополнительным выходом xpoнизатора-модулятора, - дополнительно введены перемножитель, установленный в высокочастотном приемном тракте между детектором и вторым входом индикатора, и две цепочки из последовательно соединенных фильтра, усилителя, детектора, входы которых соединены с выходом приемного высокочастотного преобразователя, а выходы - с двумя другими входами перемножителя.
В предлагаемое устройство дополнительно введены новые блоки: две цепочки из последовательно соединенных фильтра, усилителя, детектора и перемножителя, что в совокупности с введением новых связей позволяет повысить помехозащищенность и увеличить точность пеленгования с помощью параметрического импульсного локатора за счет устранения боковых лепестков в ДН приемного преобразователя вторичных высокочастотных сигналов предлагаемого устройства.
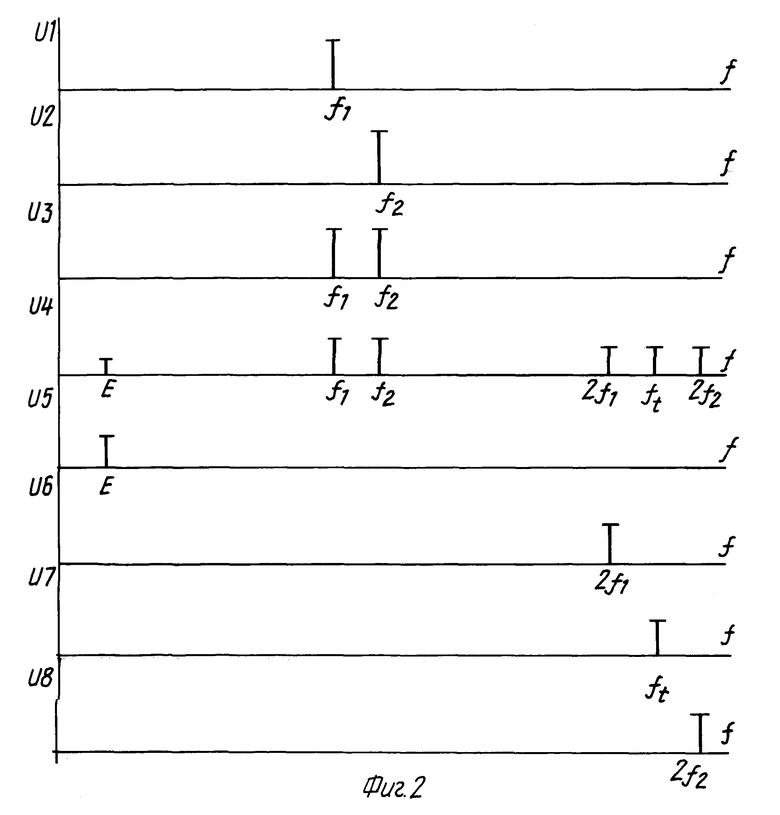
На фиг. 1 показана структурная схема заявляемого устройства; на фиг.2 - спектры сигналов в различных его точках.
Параметрический импульсный локатор содержит излучающий тракт - два генератора 1, 2, которые соединены через последовательно включенные хронизатор-модулятор 3 и усилитель мощности 4 с излучающим преобразователем накачки 5 параметрической антенны (ПА): низкочастотный (НЧ) приемный тракт - приемный преобразователь 6 акустических сигналов разностной частоты F- = f2 - f1, соединенный через последовательно включенные полосовой фильтр 7, усилитель 8, детектор 9 с первым входом индикатора 10; высокочастотный (ВЧ) приемный тракт - приемный преобразователь 11 акустических сигналов суммарной частоты f+ = f2 + f1, вторых гармоник 2f1,2 накачки, соединенный через три параллельно включенные цепочки из последовательно соединенных полосовых фильтров (12, 13, 14), усилителей (15, 16, 17), детекторов (18, 19, 20) с тремя входами перемножителя 21, выход которого соединен со вторым входом индикатора 10, причем третий вход индикатора 10 соединен с дополнительным выходом, хронизатора-модулятора З. Хронизатор-модулятор может быть выполнен по разным схемам. Например, автоколебательный генератор видеоимпульсов соединен с управляющими входами нормально закрытых временных селекторов и дополнительным выходом хронизатора-модулятора, входы селекторов соединены с выходами генераторов 1, 2, а выходы селекторов через сумматор - с входом усилителя мощности 4. При этом генератор видеоимпульсов вырабатывает периодически повторяющиеся видеоимпульсы, синхронизирующие работу индикатора и открывающие временные селекторы, на выходах которых формируются радиоимпульсы с разной частотой, которые после суммирования поступает на вход усилителя мощности. Остальные блоки параметрического импульсного локатора являются стандартными.
Работа параметрического импульсного локатора происходит следующим образом. Генераторы 1 и 2 вырабатывают высокочастотные гармонические сигналы U1, U2 с частотами f1, f2, поступающие на два входа хронизатора-модулятора 3, на выходе которого получаем радиоимпульс U3, представляющий собой видеоимпульс с бигармоническим ВЧ заполнением. Данный радиоимпульс после усилителя мощности 4 поступает на акустический преобразователь 5, излучающий зондирующий сигнал накачки в водную среду, обладающую нелинейностью. При этом происходит нелинейное взаимодействие сигналов накачки с частотами f1,2 в канале распространения, результатом которого является параметрическая генерация вторичных акустических сигналов как разностной F- = f2 - f1, так и суммарной f+ = f2 + f1 частот, вторых гармоник 2f1,2 волн накачки (см. Б.К. Новиков, О.В. Руденко, В. И. Тимошенко. "Нелинейная гидроакустика". - Л.: Судостроение, 1981). Полигармонический зондирующий сигнал распространяется до объекта лоцирования, отражается от него и, распространяясь обратно, достигает приемных преобразователей 6 и 11 НЧ и ВЧ приемных трактов параметрического локатора (акустический сигнал U4). На выходе НЧ приемного тракта после фильтрации (фильтр 7), усиления (усилитель 8) и детектирования (детектор 9) выделяется электрический сигнал U5, идентичный эхо-сигналу разностной частоты F- = f2 - f1, который подается на первый вход индикатора 10, синхронизируемого хронизатором-модулятором 3. На выходах ВЧ приемного тракта после фильтрации (фильтры 12, 13, 14), усиления (усилители 15, 16, 17) и детектирования (детекторы 18, 19, 20) выделяются электрические сигналы: U7 - с частотой f+ = f1 + f2, U6 - с частотой 2f1; U8 - с частотой 2f2, что обусловлено настройкой соответствующих полосовых фильтров 12, 13, 14. Уровни сигналов U7, U6, U8, а также и U5 в зависимости от угла приема α могут определяться выражениями:
1) для прямоугольного поршня в экране
Ui(α) = R•|sinZ/Z|, (1)
2) для круглого поршня в экране
Ui(α) = R•|2J1(Z)/Z|, (2)
где  обобщенный параметр;
обобщенный параметр;
d - наибольший размер излучающей (приемной) поверхности;
λi - длина волны i-го акустического сигнала;
α - угол излучения (приема), отсчитываемый от перпендикуляра к плоскости преобразователя;
J, (Z) - функция Бесселя 1-го рода 1-го порядка,
R = const
(см. Ультразвук. Маленькая энциклопедия. Глав. ред. Н.П. Голямина. - М.: "Сов. энциклопедия", 1979, с.221-223).
Электрические сигналы U7, U6, U8 подаются на перемножитель, на выходе которого получают напряжение U9 = U7 • U6 • U8, поступающее на второй вход индикатора 10. Тогда общая направленность K(α) лоцирования в режиме приема, например, для круглого поршня в экране будет определяться зависимостью уровня сигнала U9 от угла α: (3)
(3)
Таким образом, результирующая ДН приемного преобразователя параметрического импульсного локатора на вторичных высокочастотных акустических сигналах f+, 2f1,2 определяется произведением ДН приемной антенны для указанных сигналов, причем, подбирая значения величин частот f1, f2 исходных сигналов накачки, можно формировать практически безлепестковые характеристики направленности приемной антенны ВЧ тракта, параметрического импульсного локатора.
Таким образом, в результате дополнительного введения новых блоков перемножителя, двух фильтров, двух усилителей, двух детекторов в совокупности с введенными новыми связями удается значительно увеличить остроту главного максимума и практически полностью устранить боковые лепестки в характеристике направленности приемной антенны ВЧ тракта предлагаемого устройства.
Это увеличивает уровень отношения сигнал/шум на выходе приемного преобразователя 11 примерно в k раз, где
где α0 - угол, при котором наблюдается первый нуль результирующей характеристики направленности;
U(α) - аналитическое выражение (1) для направленности приемной антенны на одной из частот f+, 2f1, 2f2.
Для рассматриваемого случая k = 1,7. Помехозащищенностью антенны æ называется частное от деления отношения мощностей сигнала и помехи на выходе антенны Wс/Wп и интенсивностей сигнала и помехи в поле в отсутствие антенны Iс,/Iп, т.е.
(см. Смарышев М. Д. , Добровольский Ю. Ю. Гидроакустические антенны. Справочник по расчету направленных свойств гидроакустических антенн. - Л.: Судостроение, 1984, с. 24-25). Учитывая, что величина сигнала, снимаемого с антенны U (В), прямо пропорциональна уровню воздействующего звукового давления p (Па), а акустическая мощность (интенсивность) принимаемого сигнала W (Вт) ~ p2 (Па), то помехоустойчивость заявляемого устройства на ВЧ тракте должна повыситься ~ в k раз, т.е. ~ 2,9 раза.
Как известно, направленные свойства антенных систем в режиме приема используются для пеленгования объектов поиска (определение его угловых координат). В нашем случае определение направления на цель осуществляется путем изменения положения диаграммы направленности (ДН) антенны в плоскости пеленгования до достижения на выходе приемного тракта максимальной амплитуды сигнала от цели (максимальный метод пеленгования). Зафиксированное при этом пространственное положение ДН и является пеленгом цели. Зависимость выходного напряжения приемного тракта на U(α) от величины угла α между осью ДН и направлением на цель называется пеленгационной характеристикой. Для гидролокационных устройств эта характеристика описывается выражением
U(α) = Umax•Dи•Dп, (6)
где Umax - максимальное выражение, получаемое при ориентации ДН на объект;
Dи, Dп - выражение для ДН в режиме излучения и в режиме приема соответственно.
Если ДН в режимах излучения и приема одинаковы, то
U(α) = Umax•D2. (7)
Крутизна пеленгационной характеристики Sп = dU(α)/dα в области максимума ДН называется пеленгационной чувствительностью. Так как эта величина при совпадении максимума ДН с направлением на цель равна нулю, то существует определенный угол Δα, при отклонении на который оператор или решающий автомат уверенно фиксирует уменьшение амплитуды сигнала. Величиной угла Δα и характеризуют точность пеленгования. Для максимального метода пеленгования
где μ = 1-U(Δα)/Umax,
при использовании оператором визуального индикатора μ = 0,05 - 0,15, для слухового индикатора μ ≥ 0,2 (см. Колчеданцев А.С. Гидроакустические станции. - Л.: Судостроение, 1982).
Оценим точность Δα максимального метода пеленгования НЧ и ВЧ трактами макета параметрического гидролокатора ближнего действия, характеристики которого описаны в статье В.Ю. Волощенко "Гидролокатор ближнего действия с излучающей параметрической антенной"/ТРТИ. - Таганрог, 1992. - 25 с. - Деп. в ВИНИТИ 23.06.92, N 2037-B92. Так как в описываемом локационном устройстве приемно-излучающая система содержит излучающий преобразователь накачки параметрической антенны (ПА) и один приемный преобразователь, то ширина эквивалентных ДН приемно-излучающей системы по уровню 0,7 составляла: для сигнала суммарной частоты f+ = 476 кГц - 2θ0,7 = 2,6o, при предлагаемой обработке сигналов f+ = 476 кГц, 2f1 = 456 кГц, 2f2 = 496 кГц - 2θ0,7 ≃ 1,6o, для сигнала разностной частоты F- = 20 кГц - 6,4o. Тогда при визуальном пеленговании цели оператором (μ = 0,1) с помощью описываемой локационной системы точность пеленгования Δα будет равна: для ВЧ тракта - при работе на одном сигнале суммарной частоты f+ = 476 кГц - Δα = 0,5o; при предлагаемой обработке вторичных акустических сигналов f+, 2f1, 2f2 - Δα ≃ 0,28o; для НЧ тракта - при работе на сигнале разностной частоты F- = 20 кГц - Δα ≃ 1,3o. Таким образом, использование предлагаемого устройства с ВЧ приемным трактом позволяет увеличить точность пеленгования в сравнении с лоцированием как на сигнале суммарной частоты f+ (~ 2 раза), так и на сигнале разностной частоты F- (~ 3 раза). Кроме того, при горизонтальном лоцировании на малых дистанциях в мелком море наблюдались увеличение помехозащищенности и повышение точности пеленгования целей за счет снижения маскирующего влияния объемной и поверхностной реверберационной помех, а также устранение "ложных" целей" - эхо-сигналов от целей, расположенных на направлениях боковых лепестков приемной антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАМЕТРИЧЕСКИЙ АКУСТИЧЕСКИЙ ЛОКАТОР | 2002 |
|
RU2205420C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2205421C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 1996 |
|
RU2138059C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| АКУСТИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1999 |
|
RU2158007C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛЕДОМЕР | 1991 |
|
RU2019855C1 |
| Способ обнаружения объектов вблизи дна и на дне | 1991 |
|
SU1809405A1 |
Изобретение относится к устройствам активной локации для обнаружения объектов, расположенных в различных средах. Преимущественная область использования - гидроакустика. Для повышения помехозащищенности и увеличения точности пеленгования целей, что является достигаемым техническим результатом, дополнительно введены перемножитель, установленный в высокочастотном приемном тракте между детектором и вторым входом индикатора, и две цепочки из последовательно соединенных фильтра, усилителя, детектора входы которых соединены с выходом приемного акустического высокочастотного преобразователя, а выходы - с двумя другими входами перемножителя. 2 ил.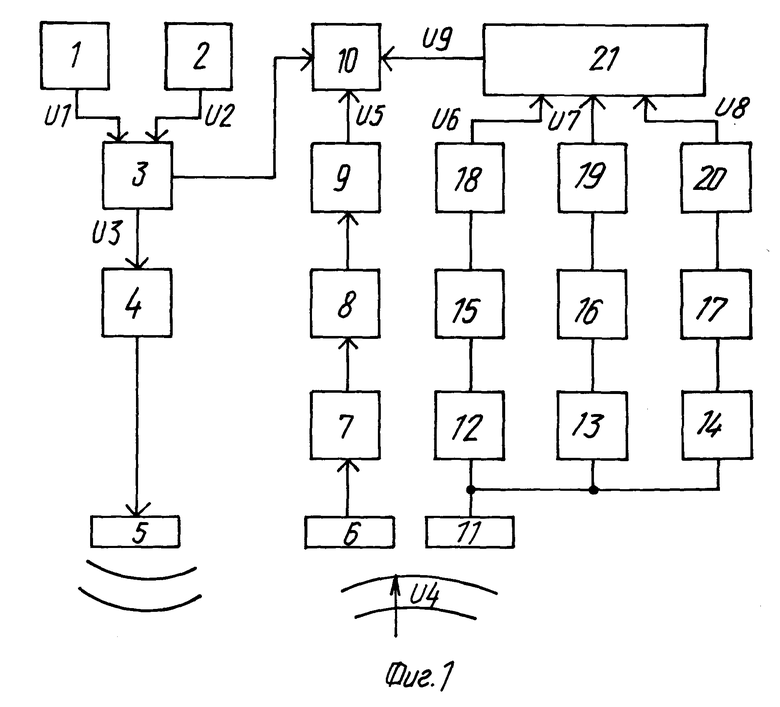
Параметрический эхо-импульсный локатор, содержащий излучающий тракт: два генератора, соединенных через последовательно включенные хронизатор-модулятор и усилитель мощности с излучающим преобразователем накачки параметрической антенны, два приемных тракта: низкочастотный (НЧ) приемный преобразователь акустических сигналов разностной частоты, соединенный через последовательно включенные полосовой фильтр сигналов разностной частоты F- = f2 - f1, усилитель, детектор с первым входом индикатора и высокочастотный (ВЧ) приемный преобразователь вторичных высокочастотных сигналов, соединенный через последовательно включенные полосовой фильтр сигналов суммарной частоты f+ = F1 + f2, усилитель, детектор со вторым входом индикатора, третий вход которого соединен с дополнительным выходом хронизатора-модулятора, отличающийся тем, что дополнительно введены перемножитель, установленный в ВЧ приемном тракте между детектором и вторым входом индикатора, и две цепочки из последовательно соединенных полосового фильтра, усилителя, детектора, входы которых соединены с выходом приемного ВЧ преобразователя, а выходы - с двумя другими входами перемножителя, причем полосовые фильтры настроены на частоты вторых гармоник 2f1 и 2f2 соответственно.
| DE 3113261 A1, 21.10.82 | |||
| СИСТЕМА ЭКРАНИРОВАНИЯ ПЕРЕМЕННЫХ МАГНИТНЫХПОЛЕЙ | 0 |
|
SU200041A1 |
| US 4470299 A, 11.09.84 | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛОТ | 1991 |
|
RU2011205C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
