Изобретение относится к области акустики и может быть использовано в прикладной гидроакустике: для защиты морских нефтегазовых платформ (МНГП), подводных хранилищ углеводородного сырья и специализированных судов; водозаборных сооружений электростанций, в том числе атомных, от проникновения потенциально опасных подводных объектов (ПО): подводных диверсантов (ПД), боевых морских животных (БМЖ), обитаемых (ОПА) и необитаемых (НПА) подводных аппаратов, а также в рыбной промышленности: для защиты водозаборных сооружений различных технических сооружений от проникновения морских биологических объектов (МБО) - рыб, рачков, медуз и др., а также для контроля прохода промысловых скоплений МБО через заданный рубеж.
Задача, которая решается изобретением, заключается в обнаружении, достоверном распознавании (классификации) и точном определении пространственных координат «акустически малозаметных» - с малым уровнем подводных акустических шумов и слабой акустической отражательной способностью, ПО в условиях повышенных окружающих шумов моря, техногенного: работы механизмов МНГП и т.д., и природного: шумы и звуки МБО и т.д., происхождения и интенсивной реверберации из-за биологических звукорассеивающих слоев (ЗРС), газовых факелов и т.д. на дальней дистанции: единицы - десятки км от МНГП; в вытеснении ПД, БМЖ, а также в повреждении элементов ОПА и НПА, в том числе и систем управления, на ближней дистанции: сотни метров - единицы км от МНГП.
Известен способ обнаружения ПО, в том числе и биологических, по их первичному акустическому полю, заключающийся в приеме сигналов от них в звуковом диапазоне (ЗД) - от 1…1,6 кГц до 16…20 кГц частот и ультразвуковом диапазоне (УЗД) - выше 16 кГц частот, усилении принятых сигналов, спектральном анализе, с целью выделения наиболее информативных классификационных признаков, сравнении их с эталонным сигналом и принятии решения об обнаружении и распознавании ПО [Шишкова Е.В. Физические основы промысловой гидроакустики.- М.: Пищевая промышленность, 1977, с.172-190].
К недостаткам данного способа относятся:
1. Незначительная дальность действия из-за использования ЗД и УЗД частот.
2. Влияние зон «акустической тени» на дальность обнаружения и достоверность распознавания ПО, обусловленных особенностями распространения акустических волн ЗД и УЗД частот в неоднородной морской среде: содержащей пузырьки воздуха, ЗРС и т.д.
3. Наличие «мертвых» зон, обусловленных несформированностью характеристики направленности (ХН) антенны в ее ближней зоне.
4. Низкая достоверность распознавания обнаруженных ПО из-за невозможности использования информации, содержащей в низком звуковом диапазоне (НЗД) частот - от 16…20 Гц до 16…20 кГц и инфразвукового диапазона (ИЗД) частот - ниже 16…20 Гц частот, в которых сосредоточена наибольшая энергия шумоизлучений ПО и регистрируется наибольшее количество дискретных составляющих (ДС) в их спектрах.
5. Невозможность применения в условиях автономных и подводных средств из-за больших - сотни метров - волновых размеров приемных антенн.
6. Невозможность вытеснения ПД и БМЖ или повреждения НПА и т.д.
Известен способ обнаружения ПО, в том числе и биологических, по их вторичному акустическому полю, заключающийся в формировании и излучении в направлении объекта поиска импульсного сигнала ЗД или УЗД частот, лоцировании объекта поиска, приеме отраженного акустического сигнала (эхо-сигнала), сравнении эхо-сигнала с эталонным сигналом и принятии решения об обнаружении и распознавании ПО [Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с.119].
К недостаткам данного способа относятся:
1. Незначительная дальность действия из-за использования ЗД и УЗД частот.
2. Влияние зон «акустической тени» на дальность обнаружения и достоверность распознавания ПО, обусловленных особенностями распространения акустических волн ЗД и УЗД частот в неоднородной морской среде, содержащей пузырьки воздуха, ЗРС и т.д.
3. Ограниченный угловой сектор наблюдения, обусловленный направленностью антенны в вертикальной и горизонтальной плоскости.
4. Наличие «мертвых» зон, обусловленных реверберацией - послезвучанием излученного сигнала.
5. Зависимость эффективности от ракурса облучения объекта - минимальная эффективность на острых курсовых углах.
6. Низкая достоверность распознавания ПО из-за использования информации, только содержащейся в эхо-сигнале.
7. Низкая эффективность вытеснения ПД и БМЖ.
8. Невозможность повреждения НПА и т.д.
Наиболее близким по технической сущности к заявляемому относится способ, выбранный в качестве способа-прототипа, обнаружения и вытеснения ПО, заключающийся в размещении на одной стороне контролируемого рубежа блока параметрического излучения низкочастотных (НЧ) сигналов, а на противоположной стороне рубежа блока параметрического приема НЧ-сигналов, обнаружение, распознавание и определение координат ПО; с помощью блока параметрического излучения НЧ-сигналов осуществляют формирование, усиление и излучение в направлении блока параметрического приема НЧ-сигналов, двух высокочастотных (ВЧ) сигналов накачки на частотах f1 и f2, близких к резонансной частоте f0 пузырьков воздуха, находящихся в приповерхностном слое воды, нелинейном взаимодействии ВЧ-волн накачки с образованием НЧ-волны разностной частоты (ВРЧ) Ω=f1-f2, распространяющейся направленно в водной среде; в формировании в блоке параметрического приема НЧ-сигналов, усилении и ненаправленном излучении ВЧ-сигнала накачки на частоте f3, который, рассеиваясь на неоднородностях водной среды, взаимодействует с НЧ ВРЧ, отраженной от ПО Ω/, а также с НЧ-волной собственного шумоизлучения ПО на частот Ω// с образованием ВЧ-волн комбинационных f3±Ω/ и f3±Ω//, распространяющихся в сторону блока параметрического приема НЧ-сигналов; выделении НЧ-сигналов на частотах Ω/ и Ω// из ВЧ модуляционных частот f3±Ω/ и f3±Ω// методом детектирования; спектральном анализе НЧ-сигналов на частотах Ω/ и Ω// и сравнении их с эталонными НЧ-сигналами на частотах Ω/ и Ω// и распознавании ПО; определение координат ПО; при этом НЧ ВРЧ воздействует на ПО, вызывая резкие отрицательные изменения в функционировании внутренних органов ПО и осуществляя их гидроакустическое вытеснение из заданного водного пространства [Бахарев С.А. Способ гидроакустического обнаружения и вытеснения пловцов и морских биологических объектов от системы водозабора атомной электростанции.- Патент РФ №2256196 по заявке №2003122012/09 от 15.07.2003 г.].
К недостаткам способа-прототипа относятся:
1. Незначительная площадь подводного наблюдения из-за использования малого количества активных гидроакустических средств (ГАС), в состав которых входит параметрическая излучающая антенна (ПИА), и пассивных ГАС, в состав которых входит параметрическая приемная антенна (ППА).
2. Невозможность реализации способа при глубинах моря более 50 м из-за использования только стационарных - установленных на дне моря - активных ГАС с ПИА и пассивных ГАС с ППА.
3. Низкая эффективность обнаружения (например, дальность и т.д.) и распознавания акустически малошумных ПО.
4. Низкая эффективность обнаружения (например, дальность и т.д.) акустически малозаметных (со слабой отражающей способностью) ПО.
5. Низкая эффективность использования ГАС с ПИА и ГАС с ППА для параметрического излучения и приема сигналов соответственно, т.к. в качестве рассеивателей используют только пузырьки воздуха, находящиеся в приповерхностном слое моря.
6. Недостаточная достоверность распознавания из-за использования информации, содержащейся только в первичном и вторичном акустических полях.
7. Малая подводная площадь, с которой акустически вытесняются ПО.
8. Невозможность повреждения НПА и т.п.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в дальнем обнаружении, достоверной классификации и точном определении пространственных координат «акустически малозаметных» ПО в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации на дальней дистанции, в вытеснении ПД, БМЖ, а также в повреждении элементов НПА, в том числе и систем управления, на ближней дистанции относительно простым способом при минимальных временных и финансовых затратах.
Поставленная цель достигается тем, что в известном способе обнаружения, распознавания и вытеснения ПО от МНГП, заключающемся в размещении на одной стороне первого контролируемого гидроакустического рубежа первого ГАС с блоком параметрического излучения НЧ-сигналов, а на противоположной стороне первого контролируемого гидроакустического рубежа первого ГАС с первым блоком параметрического приема НЧ, в обнаружении - по превышению уровня сигнала над уровнем помехи, в распознавании - сравнении принятого сигнала с эталонным сигналом и в оценке координат - пелена и дистанции ПО, а также в воздействии на ПО НЧ-сигналами и вытеснении его из заданного водного пространства, при этом первое параметрическое направленное излучение НЧ осуществляют путем формирования, усиления и направленного излучения двух первых ВЧ-сигналов накачки на частотах f1i, и f2i, близких к резонансной частоте f0 рассеивателей звука, нелинейном взаимодействии ВЧ-сигналов накачки с образованием первого НЧ-сигнала разностной частоты Ω1i=f1i-f2i, распространяющегося направленно в водной среде, при этом первый направленный параметрический прием НЧ-сигналов осуществляют путем формирования, усиления и ненаправленного излучения ВЧ-сигнала накачки на частоте f3i, близкой к резонансной частоте рассеивателей звука, рассеянии на неоднородностях водной среды и нелинейном взаимодействии ВЧ-сигнала накачки на частоте f/ 3i с первым НЧ-сигналом разностной частоты, отраженного от ПО Ω1i /, а также с НЧ собственного шумоизлучения ПО на частоте Ω// с образованием ВЧ-волн комбинационных f/ 3i±Ω1i / и f/ 3i±Ω1i //, распространяющихся в сторону первого ГАС с первым блоком параметрического приема НЧ; в выделении НЧ-сигналов на частотах Ω1j // и Ω// из ВЧ-сигналов комбинационных частот f/ 3j±Ω1i / и f/ 3i±Ω// методом детектирования, в качестве ПО дополнительно используют БМЖ, а также ОПА или НПА; дополнительно используют еще несколько - не менее двух - контролируемых гидроакустических рубежей, полностью перекрывающих по периметру со всех сторон и по всей глубине МНГП; каждое ГАС с блоком параметрического излучения НЧ-сигналов дополнительно содержит блок линейного излучения ВЧ-сигналов на частоте со ω1i (i=1,2,3 …n), равной f1i; при этом данные ГАС размещены на дне равномерно вокруг МНГП; каждое ГАС с блоком параметрического приема НЧ-сигналов дополнительно содержит блок линейного приема сигналов ЗД и УЗД в диапазоне частот Δωj (j=1, 2, 3 …n), при этом данные ГАС размещены на дне и в толще воды вокруг МНГП последовательно в шахматном порядке; дополнительно формируют, усиливают и направленно излучают над поверхностью воды электромагнитные сигналы на частотах ωэм1i (i=1, 2, 3 …n), а также направленно принимают отраженные от надводных объектов и электромагнитных неоднородностей воздушной среды, сформированных над поверхностью воды движущимся под водой ПО, электромагнитные сигналы на частотах ω/ эм1i (i=1, 2, 3 …n) с использованием нескольких - не менее трех - радиолокационных средств (РЛС), обеспечивая при этом полное радиолокационное наблюдение вокруг МНГП; дополнительно при обнаружении используют информацию о нарушениях естественной стратификации среды и искажениях параметров акустических сигналов: амплитуда, фаза и т.д., за счет акустического затенения, акустической дифракции, нелинейном взаимодействии волн различной физической природы: акустических, гидродинамических, электромагнитных и т.д., излученных ранее на частотах: f1i, f2i и ω1i - излученных в соответствующих активных ГАС соответствующими блоками параметрического и линейного излучения ВЧ акустических сигналов, а также в соответствующих пассивных ГАС соответствующими блоками излучения ВЧ-сигналов накачки f3i, рассеянных на неоднородностях водной среды ВЧ-сигналов на частотах f/ 3i и о нарушениях естественной стратификации среды и искажениях параметров электромагнитных сигналов: амплитуда, фаза и т.д., за счет нелинейного взаимодействия волн различной физической природы: электромагнитных, гидродинамических и т.д., излученных ранее на частотах ωэмi; дополнительно при распознавании объекта на классы надводный - подводный используют информацию, содержащуюся в отраженном электромагнитном сигнале на частотах ωэмi; от корпуса надводного объекта или от неоднородностей среды, сформированных в воздухе движущимся под водой ПО; дополнительно в качестве рассеивателей звука используют ЗРС и газовые факелы; дополнительно при энергетическом воздействии на ПО используют интенсивные - с амплитудой звукового давления на расстоянии 1 м от излучателя не менее 105 Па - НЧ-сигналы ИЗД и ЗД диапазонов частот; дополнительно при информационном воздействии на ПО используют сигналы ЗД и УЗД частот с амплитудой звукового давления не менее 103 Па.
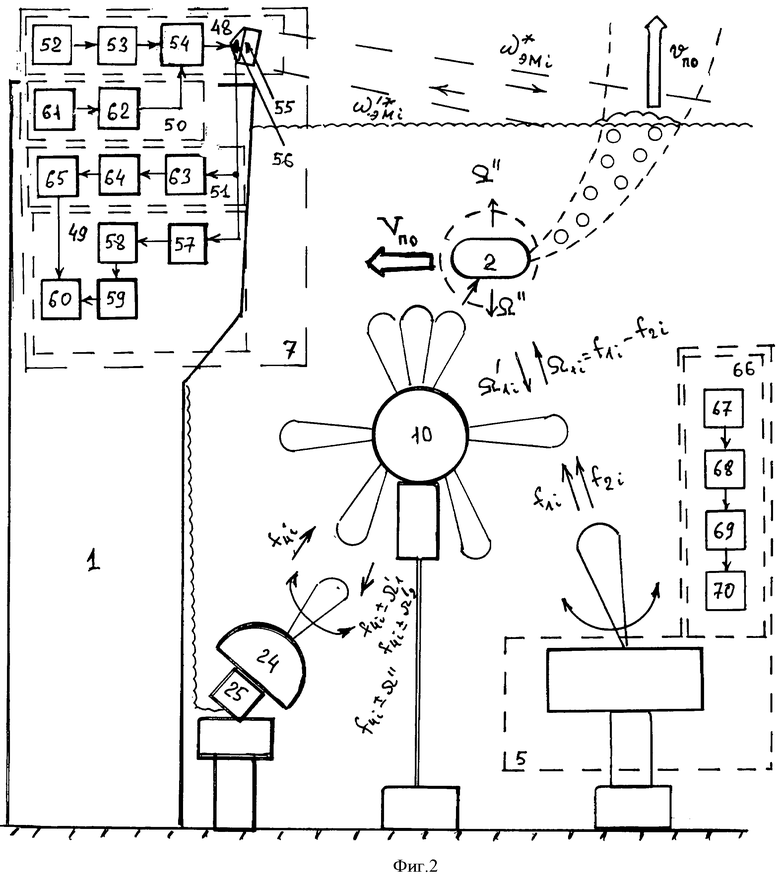
На фиг.1 и фиг.2 представлена структурная схема устройства, реализующая разработанный способ обнаружения, распознавания и вытеснения ПО от МНГП. При этом на фиг.1 представлена структурная схема устройства применительно к использованию ГАС с ПИА и ГАС с ППА, а на фиг.2 представлена структурная схема применительно к использованию РЛС.
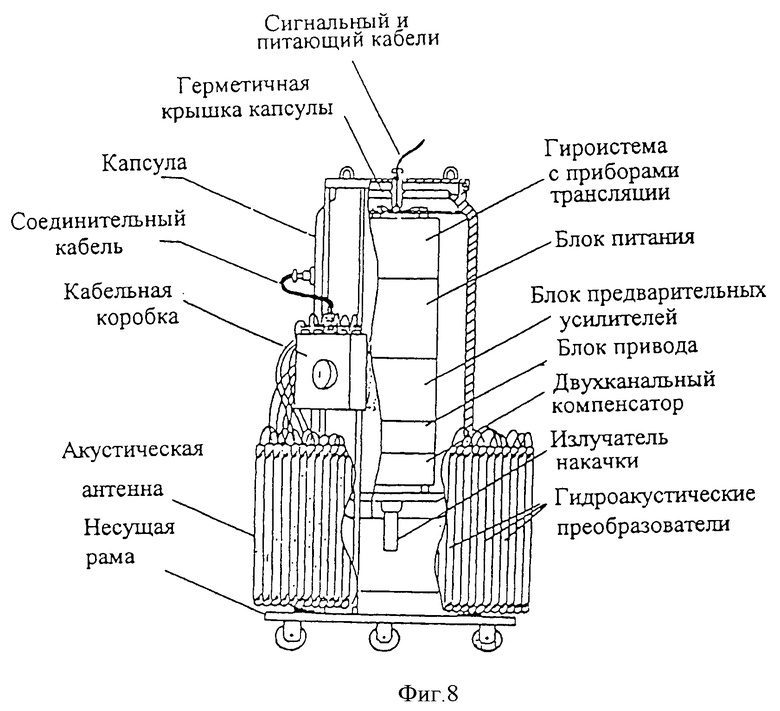
На фиг.3 - фиг.10 иллюстрируются внешних вид некоторых приборов и блоков. При этом на фиг.3 иллюстрируется внешний вид плоско-поворотной антенны, входящей в состав стационарной активной ГАС с ПИА; на фиг.4 иллюстрируется внешний вид пассивной ГАС с ППА, способной к установке в стационарном и автономном вариантах и у которой ХН вращается механическим способом; на фиг.5 иллюстрируется внешний вид автономной пассивной ГАС с ППА, у которой осуществляется электронное сканирование ХН; на фиг.6 иллюстрируется внешний вид акустической системы энергетического и информационного воздействия на ПО; на фиг.7 иллюстрируется внешний вид активно-пассивной ГАС с ПИА и ППА, способной к установке в стационарном и автономном вариантах и у которой ХН вращается механическим способом; на фиг.8 иллюстрируется внешний вид стационарной пассивной ГАС с ППА, у которой осуществляется электронное сканирование ХН; на фиг.9 иллюстрируется усилитель мощности, используемый для усиления информационных сигналов воздействия на ПО; на фиг.10 иллюстрируется усилитель мощности, используемый для усиления энергетических сигналов воздействия на ПО.
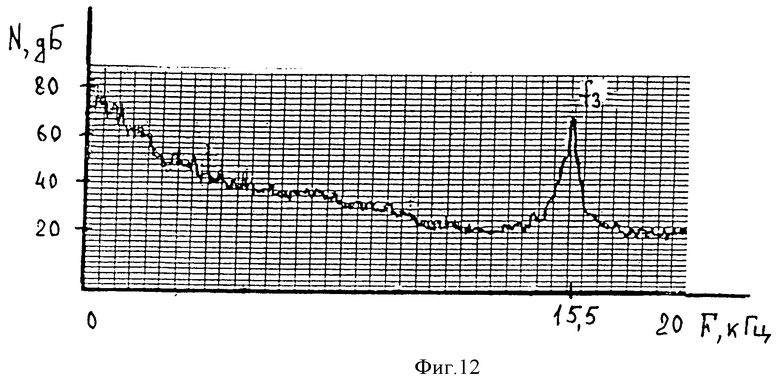
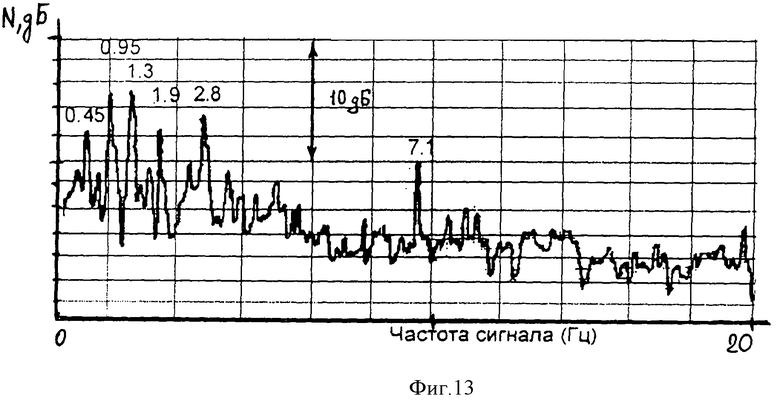
На фиг.11 - фиг.14 иллюстрируются результаты испытаний разработанных ГАС с ППА. При этом на фиг.11 представлен отклик ППА в составе пассивной ГАС с диаметром приемного элемента 600 мм при его механическом сканировании в горизонтальной плоскости в процесс пеленгования НЧ-сигнала частотой 28,5 Гц; на фиг.12 представлена спектрограмма ВЧ-сигнала накачки в ГАС с ППА на частоте f3=15,5 кГц при пеленговании источника НЧ подводных сигналов; на фиг.13 представлена спектрограмма сигналов ПО, зарегистрированная с помощью стационарной ГАС с ППА; на фиг.14 представлена спектрограмма сигналов ПО, зарегистрированная с помощью автономной ГАС с ППА.
Устройство содержит: МНГП (1), движущийся со скоростью Vпо, превышающей скорость распространения внутренних волн ПО (2), в качестве которого могут быть использованы: подводный аппарат (2/) - НПА или ОПА; подводный пловец (2//) с индивидуальным или коллективным средством передвижения и БМЖ (2///), имеющий (сивуч и т.д.) и не имеющий (касатка) в природе естественного хищника.
При этом в толще воды равномерно по пространству на дальней дистанции: единицы - десятки км от МНГП (1) - на одинаковом угловом расстоянии по периметру размещено несколько - не менее 3-х - автономных пассивных ГАС (3), в состав каждого из которых входят: тракт параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот и тракт линейного приема сигналов в ЗД и УЗД диапазонах частот; несколько - не менее 3-х - стационарных пассивных ГАС, в состав каждого из которых входят: тракт параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот и тракт линейного приема сигналов в ЗД и УЗД диапазонах частот. При этом автономные пассивные ГАС (3) и стационарные пассивные ГАС (4) размещены в шахматном порядке относительно друга.
Также в толще воды равномерно по пространству на средней дистанции: сотни метров - единицы км от к МНГП (1) на одинаковом угловом расстоянии по периметру размещено несколько - не менее 3-х - стационарных активных ГАС (5), в состав каждого из которых входят: тракт параметрического излучения сигналов в НЗД, ЗД и УЗД диапазонах частот и тракт линейного излучения сигналов в ЗД и УЗД диапазонах частот, а также блок параметрической и линейной обработки принятых сигналов. Также в толще воды равномерно по пространству на ближней дистанции: десятки - сотни метров от к МНГП (1) - на одинаковом угловом расстоянии по периметру размещено несколько - не менее 3-х - стационарных направленных: вперед-вверх излучающих систем (6) ИЗД и НЗД диапазонов частот.
Одновременно с этим на самой МНГП (1) на одинаковом угловом расстоянии по периметру размещено несколько - не менее 3-х - стационарных РЛС (7), в состав каждого из которых входят: тракт линейного изучения импульсных электромагнитных сигналов и тракт линейного приема отраженных от надводного или воздушного объекта импульсных электромагнитных сигналов, а также тракт непрерывного излучения электромагнитных сигналов сложной формы: линейно-частотно модулированных (ЛЧМ) и т.д. сигналов и тракт приема отраженных от поверхности воды и от неоднородностей водной среды над движущимся под водой ПО, электромагнитных сигналов сложной формы.
В свою очередь каждое автономное пассивное ГАС (3) содержит тракт (8) линейного приема сигналов в ЗД и УЗД диапазонах частот и тракт (9) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот. При этом тракт (8) линейного приема сигналов в ЗД и УЗД диапазонах частот, в свою очередь, содержит последовательно электрически соединенные: приемную многоэлементную антенну (10) с веером ХН в горизонтальной и вертикальной плоскостях, перекрывающих друг друга на уровне «-3 дБ», основной усилитель (11), диапазонный фильтр (12), интегратор (13), решающее устройство (14) и индикаторное устройство (15). Тракт (9) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот содержит: последовательно электрически соединенные первый перестраиваемый полосовой ВЧ-фильтр (16), подключенный своим входом к выходу основного усилителя (11), детектор (17) и второй перестраиваемый полосовой НЧ-фильтр (18), подключенный своим выходом ко второму входу решающего устройства (14). Кроме того, тракт (9) содержит последовательно электрически соединенные перестраиваемый генератор ВЧ-сигнала накачки (19), усилитель мощности (20) и ненаправленный излучатель (21) ВЧ-сигнала накачки на частоте f3i.
В свою очередь каждое стационарное пассивное ГАС (4) содержит тракт (22) линейного приема сигналов в ЗД и УЗД диапазонах частот и тракт (23) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот. При этом тракт (22) линейного приема сигналов в ЗД и УЗД диапазонах частот, в свою очередь, содержит последовательно электрически соединенные: приемную антенну (24) с компенсатором (25) - устройством для формирования и сканирования ХН в горизонтальной и вертикальной плоскостях, основной усилитель (26), диапазонный фильтр (27), интегратор (28), решающее устройство (29) и индикаторное устройство (30). Тракт (23) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот содержит: последовательно электрически соединенные первый перестраиваемый полосовой ВЧ-фильтр (31), подключенный своим входом к выходу основного усилителя (26), детектор (32) и второй перестраиваемый полосовой НЧ-фильтр (33), подключенный своим выходом ко второму входу решающего устройства (29). Кроме того, тракт (23) содержит последовательно электрически соединенные перестраиваемый генератор ВЧ-сигнала накачки (34), усилитель мощности (35) и ненаправленный излучатель (36) ВЧ-сигнала накачки на частоте f4i.
В свою очередь в каждом стационарном активном ГАС (5) тракт (37) параметрического излучения сигналов в НЗД, ЗД и УЗД диапазонов частот содержит последовательно электрически соединенные: первый ВЧ-генератор (39), первый ВЧ-усилитель мощности (40), сумматор-коммутатор (41) и ВЧ-излучатель (42) гидроакустических сигналов, а также последовательно соединенные второй ВЧ-генератор (43), второй усилитель мощности (44) и сумматор-коммутатор (41). При этом тракт (38) линейного излучения сигналов в ЗД и УЗД диапазонах частот содержит последовательно соединенные второй ВЧ-генератор (43), второй усилитель мощности (44), сумматор-коммутатор (41) и ВЧ-излучатель (42) гидроакустических сигналов. При этом тракт (38) линейного излучения сигналов составляет часть тракта (37) параметрического излучения сигналов. Кроме того, в каждом стационарном активном ГАС (5) блок (66) параметрической и линейной обработки принятых сигналов содержит последовательно электрически соединенные широкополосный усилитель (67), блок фильтров (68), решающее устройство (69) и устройство отображения информации (70).
Также в толще воды равномерно по пространству на ближней дистанции: десятки - сотни метров от к МНГП (1) - на одинаковом угловом расстоянии по периметру размещено несколько - не менее 3-х - стационарных направленных: вперед-вверх, вперед-вперед и вперед-вниз излучающих систем (6) ИЗД и НЗД диапазонов частот. При этом каждая излучающая система (6) содержит последовательно функционально соединенные: блок формирования сигналов (46), блок усиления сигналов (47) и несколько - не менее трех - блоков излучения сигналов (47), подключенных к выходу блока усиления сигналов (47) параллельно друг другу.
Одновременно с этим на самой МНГП (1) на одинаковом угловом расстоянии по периметру размещено несколько - не менее 3-х - стационарных РЛС (7), в состав каждого из которых входят: тракт (48) линейного изучения импульсных электромагнитных сигналов и тракт (49) линейного приема отраженных от надводного или воздушного объекта импульсных электромагнитных сигналов, а также тракт (50) непрерывного излучения электромагнитных сигналов сложной формы: линейно-частотно модулированных сигналов (ЛЧМ) и т.д. и тракт (51) приема отраженных от поверхности воды и от неоднородностей водной среды над движущимся под водой ПО, электромагнитных сигналов сложной формы.
При этом тракт (48) линейного изучения импульсных электромагнитных сигналов ωэмi содержит последовательно электрически соединенные: импульсный генератор (52) электромагнитных сигналов, импульсный усилитель электромагнитных сигналов, коммутатор (54) режимов излучения и приемоизлучающую антенну (55) электромагнитных сигналов ωэмi. Тракт (49) линейного приема отраженных от надводного или воздушного объекта импульсных электромагнитных сигналов ω/ эмi содержит последовательно электрически соединенные: приемоизлучающую антенну (55), коммутатор (56) режимов приема, предварительный усилитель (57) импульсных электромагнитных сигналов, блок обработки сигналов (58), индикаторное устройство (59) и решающее устройство (60).
При этом тракт (50) непрерывного излучения электромагнитных сигналов ω*эмi сложной формы содержит последовательно электрически соединенные: генератор (61) электромагнитных сигналов сложной формы, усилитель (62) электромагнитных сигналов сложной формы, коммутатор (54) режимов излучения и приемоизлучающую антенну (55); тракт (51) приема отраженных от поверхности воды и от неоднородностей водной среды над движущимся под водой ПО электромагнитных сигналов сложной формы ω/*эмi содержит последовательно электрически соединенные: приемоизлучающую антенну (55), коммутатор (56) режимов приема, предварительный усилитель (63) электромагнитных сигналов сложной формы, блок обработки сигналов (64) сложной формы, индикаторное устройство (65) и решающее устройство (60). При этом решающее устройство (60) является общим для обоих трактов приема.
Следует отметить, что все несколько - не менее 3-х - автономных пассивных ГАС (3), несколько - не менее 3-х - стационарных пассивных ГАС (4), несколько - не менее 3-х - стационарных активных ГАС (5), несколько - не менее 3-х - стационарных направленных излучающих систем (6) и несколько - не менее 3-х - стационарных РЛС (7) являются близкими по технической сущности и незначительно - для обеспечения близости к резонансным рассеивателям звука, обеспечения гидроакустической и электромагнитной совместимости и для обеспечения раздельного наблюдения работы каждого из них.
Устройство функционирует следующим образом (фиг.1, фиг.2).
К МНГП (1) со скоростью Vпо приближается ПО (2), в качестве которого могут быть использованы: подводный аппарат (2/), подводный пловец (2//) и БМЖ (2///). При этом в процессе своего движения ПО (2) формирует вокруг себя неоднородность в водной среде - за счет нарушения естественной стратификации толщи воды и над собой, преимущественно за собой, формирует неоднородность воздушной среды. Условно это можно представить как три физических процесса: образование мельчайших пузырьков воздуха в морской воде, всплытие ионизированных солями морской воды пузырьков воздуха на поверхность воды и поднятие ионизированных солями морской воды пузырьков воздуха вверх от воды после разрушения пузырьков воздуха на поверхности воды. При этом ПО содержит внутреннюю полость с воздухом: легкие и желудок подводного пловца (ПП) и БМЖ, баллон с воздухом у ПП и т.д., которая обладает собственными резонансными частотами переотражения и поглощения акустической энергии. Кроме того, из-за собственных геометрических размеров ПО является своеобразным экраном для акустических волн, распространяющихся в водной среде.
В каждом из автономных пассивных ГАС (3), равномерно установленных в толще воды: ближе к поверхности - при глубинах больших более 50 м, и на среднем горизонте - при глубинах менее 50 м, на дальней дистанции: единицы - десятки км от МНГП (1) на одинаковом угловом расстоянии по периметру, в тракте (9) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот при помощи последовательно электрически соединенных: соответствующего перестраиваемого генератора (19), усилителя мощности (20) и ненаправленного излучателя (21), формируют, усиливают и ненаправленно излучают ВЧ-сигнал накачки на частоте f3i (i=1, 2, 3 …): ВЧ-сигнал накачки на частоте f31 - для первого автономного пассивного ГАС (3) распространяется во все стороны и принимается ближайшими - слева и справа от него на одном горизонте, автономными пассивными ГАС (3), а также ближайшими - слева и справа от него, а также находящимися на более нижнем горизонте, стационарными пассивными ГАС (4). Рассеиваясь на неоднородностях водной среды, приповерхностный пузырьковый слой (ПППС), глубинный ЗРС, придонный ЗРС, газовый факел, область возмущения вокруг движущегося ПО (2), граница раздела двух сред: вода-воздух, граница раздела двух сред: вода-грунт и т.д., ВЧ-сигнал накачки на частоте f/ 31 - для первого автономного пассивного ГАС (3) - взаимодействует с НЧ-сигналом разностной частоты, отраженной от корпуса и (или) прилегающих к корпусу неоднородностей водной среды, вызванных движением ПО (2), Ω1 / - в процессе работы первого стационарного активного ГАС (5) и Ω2 / - в процессе работы второго стационарного активного ГАС (5) и т.д., а также с НЧ-волной собственного шумоизлучения - первичного акустического поля ПО (2) на частоте Ω//. При этом формируются ВЧ-волны комбинационных частот f/ 31±Ω1 /, f/ 31±Ω2 / и f/ 31±Ω//, которые распространяются во все стороны, в том числе в сторону приемной многоэлементной антенны (10) с веером ХН в горизонтальной и вертикальной плоскостях, перекрывающих друг друга на уровне «-3 дБ», первого автономного пассивного ГАС (3).
В тракте (8) линейного приема сигналов в ЗД и УЗД диапазонах частот сигналы на частоте Ω1 / - отраженный от ПО (2) сигнал в процессе работы первого стационарного активного ГАС (5), на частоте Ω2 / - отраженный от ПО (2) сигнал в процессе работы второго стационарного активного ГАС (5), а также на частоте Ω// - собственного шумоизлучения ПО (2) последовательно поступают на приемную многоэлементную антенну (10) с веером ХН в горизонтальной и вертикальной плоскостях, перекрывающих друг друга на уровне «-3 дБ», основной усилитель (11), в котором осуществляют усиление принятых сигналов до необходимого уровня, диапазонный фильтр (12), в котором повышают соотношение сигнал/помеха (С/П) за счет фильтрации (отделения) НЧ- и ВЧ-помех, интегратор (13), в котором осуществляют повышение соотношения С/П за счет накопления энергии сигнала, в решающее устройство (14), в котором определяют параметры принятого сигнала и принимают решение об обнаружении ПО (2), и индикаторное устройство (15), на котором иллюстрируют параметры ПО: направление на него (пеленг) - по соотношению С/П в той или иной ХН из веера ХН, ориентировочную дистанцию до него - по сравнению фактического соотношения С/П с расчетным соотношением С/П, ориентировочную глубину нахождения ПО - по соотношению С/П в той или иной ХН из веера ХН, ориентировочные курс и скорость движения ПО - по изменению соотношения С/П в основной и соседних ХН из веера ХН, по доплеровскому изменению частоты и т.д.
Одновременно с этим в тракте (9) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот с помощью приемной многоэлементной антенны (10) с веером ХН в горизонтальной и вертикальной плоскостях, перекрывающих друг друга на уровне «-3 дБ», принимают ВЧ-волны комбинационных частот: f/ 31±Ω1 /, f/ 31±Ω2 / и f/ 31±Ω//, которые затем усиливают в основном усилителе (11) и подают на вход первого перестраиваемого полосового ВЧ-фильтра (16), центральная частота которого f/ 31 равна частоте излученного ранее ВЧ-сигнала f31, в котором уменьшают НЧ- и ВЧ-помехи, находящиеся, соответственно, слева и справа от центральной частоты полосового фильтра (16). Далее сигнал подают на детектор (17), в котором осуществляют выделение НЧ-сигналов на частотах Ω1 /, Ω2 / и Ω// из ВЧ-сигналов на частотах f/ 31±Ω1 /, f/ 31±Ω2 / и f/ 31±Ω// методом амплитудной и фазовой (частотной) демодуляции. При фазовой демодуляции на второй - опорный - вход детектора (17) с выхода перестраиваемого генератор (19) подают сигнал на частоте f31. При этом фазовая демодуляция повышает дальность обнаружения из-за того, что более чувствительна к изменению параметров гидроакустических сигналов на неоднородностях водной среды, но имеет высокую вероятность ложной тревоги, в то время как амплитудная демодуляция наоборот, обладая меньшей чувствительностью, повышает вероятность правильной классификации обнаруженных ПО.
С выхода детектора (17) НЧ-сигнал последовательно подают на фильтр (18) нижних частот - для уменьшения влияния НЧ-помех, далее в решающее устройство (14), в котором определяют параметры принятого сигнала и принимают решение об обнаружении ПО (2), а затем на индикаторное устройство (15), на котором иллюстрируют параметры ПО: направление на него (пеленг) - по соотношению С/П в той или иной ХН из веера ХН, ориентировочную дистанцию до него - по сравнению фактического соотношения С/П с расчетным соотношением С/П, ориентировочную глубину нахождения ПО - по соотношению С/П в той или иной ХН из веера ХН, ориентировочные курс и скорость движения ПО - по изменению соотношения С/П в основной и соседних ХН из веера ХН, по доплеровскому изменению частоты и т.д.
Одновременно с этим по аналогичному принципу в каждом из стационарных пассивных ГАС (4), равномерно установленных на дне на одинаковом угловом расстоянии по периметру, в тракте (23) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот при помощи последовательно электрически соединенных соответствующего перестраиваемого генератора (34), усилителя мощности (35) и ненаправленного излучателя (36) формируют, усиливают и ненаправленно излучают ВЧ-сигнал накачки на частоте f4i (i=1, 2, 3 …): ВЧ-сигнал накачки на частоте f41 - для первого стационарного пассивного ГАС (4) - распространяется во все стороны и принимается ближайшими - слева и справа от него на одном горизонте - стационарными пассивными ГАС (4), а также ближайшими - слева и справа от него, а также находящимися на более высоком горизонте автономными пассивными ГАС (3). Рассеиваясь на неоднородностях водной среды, ПППС - в условиях глубин района менее 50 м, глубинный ЗРС, придонный ЗРС, газовый факел, область возмущения вокруг движущегося ПО (2), граница раздела двух сред: вода-воздух, граница раздела двух сред: вода-грунт и т.д., ВЧ-сигнал накачки на частоте f/ 41 - для первого стационарного пассивного ГАС (4) взаимодействует с НЧ-сигналом разностной частоты, отраженной от корпуса и (или) прилегающих к корпусу неоднородностей водной среды, вызванных движением ПО (2), Ω1 / - в процессе работы первого стационарного активного ГАС (5) и Ω2 / - в процессе работы второго стационарного активного ГАС (5) и т.д., а также с НЧ-волной собственного шумоизлучения ПО (2) на частоте Ω//. При этом формируются ВЧ-волны комбинационных частот f/ 41±Ω1 /, f/ 41±Ω2 / и f/ 41±Ω//, которые распространяются во все стороны, в том числе в сторону приемной антенны (24) с устройством (25) формирования и сканирования ХН в заданной плоскости, обеспечивающем подводное наблюдение в толще водного пространства в заданном секторе наблюдения вокруг МНГП.
В тракте (22) линейного приема сигналов в ЗД и УЗД диапазонах частот сигналы на частоте Ω1 / - отраженный от ПО (2) сигнал в процессе работы первого стационарного активного ГАС (5), на частоте Ω2 / - отраженный от ПО (2) сигнал в процессе работы второго стационарного активного ГАС (5), а также на частоте Ω// - собственного шумоизлучения ПО (2) последовательно поступают на приемную антенну (24), ориентированную устройством (25) формирования и сканирования ХН соответствующим образом в заданной плоскости, основной усилитель (26), в котором осуществляют усиление принятых сигналов до необходимого уровня, диапазонный фильтр (27), в котором повышают соотношение сигнал/помеха (С/П) за счет фильтрации (отделения) НЧ- и ВЧ-помех, интегратор (28), в котором осуществляют повышение соотношения С/П за счет накопления энергии сигнала, в решающее устройство (29), в котором определяют параметры принятого сигнала и принимают решение об обнаружении ПО (2) и индикаторное устройство (30), на котором иллюстрируют параметры ПО: направление на него (пеленг) - по соотношению С/П, ориентировочную дистанцию до него - по сравнению фактического соотношения С/П с расчетным соотношением С/П, ориентировочную глубину нахождения ПО - по соотношению С/П при том или ином угле наклона ХН в вертикальной плоскости и скорость движения ПО - по изменению соотношения С/П и доплеровской частоте и т.д.
Одновременно с этим в тракте (23) параметрического приема сигналов в ИЗД, НЗД, ЗД и УЗД диапазонах частот с помощью приемной антенны (24) с устройством (25), обеспечивающим соответствующую ориентацию ХН в горизонтальной и вертикальной плоскостях, принимают ВЧ-волны комбинационных частот: f/ 41±Ω1 /, f/ 41±Ω2 / и f/ 41±Ω//, которые затем усиливают в основном усилителе (26) и подают на вход первого перестраиваемого полосового ВЧ-фильтра (31), центральная частота которого f/ 41 равна частоте излученного ранее ВЧ-сигнала f41, в котором уменьшают НЧ- и ВЧ-помехи, находящиеся, соответственно, слева и справа от центральной частоты полосового фильтра (31). Далее сигнал подают на детектор (32), в котором осуществляют выделение НЧ-сигналов на частотах Ω1 /, Ω2 / и Ω// из ВЧ-сигналов на частотах f/ 41±Ω1 /, f/ 41±Ω2 / и f/ 41±Ω// методом амплитудной и фазовой (частотной) демодуляции. При фазовой демодуляции на второй - опорный - вход детектора (32) с выхода перестраиваемого генератора (34) подают сигнал на частоте f41. При этом фазовая демодуляция повышает дальность обнаружения из-за того, что более чувствительна к изменению параметров гидроакустических сигналов на неоднородностях водной среды, но имеет высокую вероятность ложной тревоги, в то время как амплитудная демодуляция наоборот, обладая меньшей чувствительностью, повышает вероятность правильной классификации обнаруженных ПО.
С выхода детектора (32) НЧ-сигнал последовательно подают на фильтр (33) нижних частот - для уменьшения влияния НЧ-помех, далее в решающее устройство (29), в котором определяют параметры принятого сигнала и принимают решение об обнаружении ПО (2), а затем на индикаторное устройство (30), на котором иллюстрируют аналогичные параметры ПО: пеленг на ПО, ориентировочную дистанцию до ПО, ориентировочную глубину нахождения ПО, ориентировочные курс и скорость движения ПО, по доплеровскому изменению частоты и т.д.
Одновременно с этим периодически - с чередованием режимов параметрического и линейного излучения зондирующих сигналов в соответствующем тракте (37) параметрического излучения сигналов в НЗД, ЗД и УЗД диапазонов частот каждого их нескольких стационарных активных ГАС (5), установленных в толще воды равномерно по пространству на средней дистанции: сотни метров - единицы км от к МНГП (1) на одинаковом угловом расстоянии по ее периметру, с помощью последовательно электрически соединенных первого ВЧ-генератора (39) и первого ВЧ-усилителя мощности (40) формируют и усиливают ВЧ-сигнал на частоте f1i, а с помощью последовательно электрически соединенных второго ВЧ-генератора (43) и второго усилителя мощности (44) формируют и усиливают ВЧ-сигнал на частоте f2i. При этом частоты f1i и f2i близки к резонансной частоте f0 рассеивателей звука, доминирующих в области взаимодействия акустических волн на частотах f1i и f2i. Далее сигналы на частотах f1i и f2i последовательно подают на сумматор-коммутатор (41), обеспечивающий коммутацию режимов излучения и приема сигналов, а также согласование сигналов на частотах f1i и f2i, и ВЧ-излучатель (42).
С выхода ВЧ-излучателя (42) ВЧ-сигналы на частотах f1i и f2i направленно - благодаря волновым размерам ВЧ-излучателя (42) - одновременно излучают в неоднородную водную среду, в которой происходит нелинейное взаимодействие акустических волн на частотах f1i и f2i с образованием ВЧ-волн суммарных и разностных частот. Высокочастотные волны суммарных частот и исходные ВЧ-волны на частотах f1i и f2i относительно быстро затухают в пространстве, а вот НЧ ВРЧ Ω1i=f1i-f2i распространяется в узком пространственном секторе на значительное расстояние. При этом исходные ВЧ-волны на частотах f1i и f2i и НЧ ВРЧ Ω1i принимаются, соответственно, в линейном и в параметрическом режимах работы ближайших автономных пассивных ГАС (3) и ближайших стационарных пассивных ГАС (4), и они также являются сигналами дальней подсветки среды.
Распространяясь в водной среде, в том числе и в сторону движущегося ПО (2), НЧ ВРЧ полностью отражается от корпуса ПО (2), резонансно переотражается от воздушной полости внутри ПО (2) или резонансно поглощается воздушной полостью ПО (2) - если ПО находится в основном максимуме ХН антенны, а частота НЧ ВРЧ близка к НЧ резонансной частоте переотражения или поглощения акустической энергии, соответственно; рассеивается, в том числе и в обратном направлении, на неоднородностях водной среды, сформированных движущимся ПО (2), - если область неоднородностей находится в основном максимуме ХН антенны.
В дальнейшем отраженную НЧ ВРЧ Ω/ 1i направленно принимают обратимым ВЧ приемо-передающим электроакустическим преобразователем - ВЧ-излучателем (42) гидроакустических сигналов, преобразуют в электрический сигнал и через сумматор-коммутатор (41) последовательно подают на широкополосный усилитель (67), в котором происходит усиление НЧ-сигнала, блок фильтров (68), в котором принятый НЧ эхо-сигнал Ω/ 1i фильтруют от более НЧ- и более ВЧ-помех, решающее устройство (69), в котором определяют параметры эхо-сигнала НЧ ВРЧ Ω/ 1i и принимают решение об обнаружении ПО (2), а затем на индикаторное устройство (70), на котором иллюстрируют параметры ПО: направление на него (пеленг) - по соотношению С/П, ориентировочную дистанцию до него - по сравнению фактического соотношения С/П с расчетным соотношением С/П, ориентировочную глубину нахождения ПО - по углу наклона ХН антенны в вертикальной плоскости, ориентировочные курс и скорость движения ПО - по изменению соотношения С/П в ХН, по доплеровскому изменению частоты и т.д., блока (66) параметрической и линейной обработки принятых сигналов.
Одновременно с этим периодически - с чередованием режимов параметрического и линейного излучения зондирующих сигналов - в соответствующем тракте (38) линейного излучения сигналов в ЗД и УЗД диапазонов частот каждого из нескольких стационарных активных ГАС (5), установленных в толще воды равномерно по пространству на средней дистанции: сотни метров - единицы км от к МНГП (1), на одинаковом угловом расстоянии по ее периметру, с помощью последовательно электрически соединенных ВЧ-генератора (43) и ВЧ-усилителя мощности (44) формируют и усиливают ВЧ импульсный сигнал на частоте f2иi, который далее последовательно подают на сумматор-коммутатор (41) и ВЧ-излучатель (42).
С выхода ВЧ-излучателя (42) ВЧ импульсный сигнал на частоте f2иi направленно - благодаря волновым размерам ВЧ-излучателя (42) - излучают в направлении ПО (2). При этом исходный ВЧ импульсный сигнал на частоте f2иi принимается, соответственно, в линейном и в параметрическом режимах работы ближайших автономных (3) и стационарных (4) пассивных ГАС, и они также являются сигналами дальней подсветки среды. При наличии ПО (2) в ХН ВЧ-антенны (42) ВЧ импульсный сигнал на частоте f/ 2иi отражается от корпуса ПО (2). В дальнейшем его направленно принимают обратимым ВЧ приемо-передающим электроакустическим преобразователем - ВЧ-излучателем (42) гидроакустических сигналов - преобразуют в электрический сигнал и через сумматор-коммутатор (41) последовательно подают на широкополосный усилитель (67), в котором происходит усиление НЧ-сигнала, блок фильтров (68), в котором принятый ВЧ импульсный сигнал на частоте f/ 2иi фильтруют от более НЧ- и более ВЧ-помех, решающее устройство (69), в котором определяют его параметры и принимают решение об обнаружении ПО (2), а затем на индикаторное устройство (70), на котором иллюстрируют параметры ПО: направление на него (пеленг) - по соотношению С/П, ориентировочную дистанцию до него - по сравнению фактического соотношения С/П с расчетным соотношением С/П, ориентировочную глубину нахождения ПО - по углу наклона ХН антенны в вертикальной плоскости, ориентировочные курс и скорость движения ПО - по изменению соотношения С/П в ХН, по доплеровскому изменению частоты и т.д., блока (66) параметрической и линейной обработки принятых сигналов.
Одновременно с этим в каждой из нескольких излучающих систем (6), равномерно по пространству и на одинаковом угловом расстоянии по периметру размещенных на ближней дистанции: десятки - сотни метров от МНГП (1), - в последовательно функционально соединенных блоке формирования сигналов (46), блоке усиления сигналов (47) и нескольких - не менее трех - блоках излучения сигналов (47), подключенных к выходу блока усиления сигналов (47) параллельно друг другу, осуществляют формирование, усиление и излучение: вперед-вверх, вперед-вперед и вперед-вниз от МНГП (1) интенсивных гидроакустических сигналов ИЗД и НЗД диапазонов частот. При этом в качестве излучающих систем (6) могут быть использованы электроакустические, воздушные (пневмопушки) и т.д.
Направленно распространяясь в толще воды, - чтобы исключить повреждения оборудования МНГП (1) и обслуживающего персонала - интенсивные гидроакустические сигналы воздействуют на ПО (2) и на ближней дистанции от МНГП (1) выводят его из строя: повреждают ОПА и НПА, травмируют ПД и МБЖ и т.д.
Одновременно с этим на дальней дистанции данные интенсивные гидроакустические сигналы ИЗД и НЗД диапазонов частот используют в качестве лоцирующих сигналов для обнаружения ПО (2), по аналогии с НЧ ВРЧ Ω1i. Распространяясь в водной среде, в том числе и в сторону движущегося ПО (2), данные интенсивные гидроакустические сигналы ИЗД и НЗД диапазонов частот аналогичным образом полностью отражаются от корпуса ПО (2) или резонансно переотражаются от воздушной полости внутри ПО (2); рассеиваются, в том числе и в обратном направлении, на неоднородностях водной среды, сформированных движущимся ПО (2).
Одновременно с этим на самой МНГП (1) в тракте (48) линейного излучения импульсных электромагнитных сигналов ωэмi соответствующей РЛС (7) с помощью последовательно электрически соединенных импульсного генератора (52) электромагнитных сигналов, импульсного усилителя электромагнитных сигналов, коммутатора (54) режимов излучения и приемоизлучающей антенны (55) формируют, усиливают и излучают импульсный электромагнитный сигнал ωэмi При наличии надводного - быстроходное судно, катер и т.д. - или воздушного - беспилотный самолет, вертолет и т.д. - объекта в ХН антенны (55) РЛС (7) отраженный от их корпуса импульсный электромагнитный сигнал ω/ эмi принимают, усиливают, обрабатывают и анализируют его параметры в тракте (49) линейного приема отраженных от надводного или воздушного объекта импульсных электромагнитных сигналов ω/ эмi с помощью последовательно электрически соединенных приемоизлучающей антенны (55), коммутатора (56) режимов приема, предварительного усилителя (57) импульсных электромагнитных сигналов, блока обработки сигналов (58), индикаторного устройства (59) и решающего устройства (60). При этом особое внимание в случае отсутствия ближних надводных или ближних воздушных посторонних объектов уделяют тем областям воздушного пространства, под которыми в толще воды произведено обнаружение ПО (2), но затруднена его первичная классификация на классы: надводный или подводный объект.
В случае отсутствия ближних надводных или ближних воздушных посторонних объектов периодически в тракте (50) непрерывного излучения электромагнитных сигналов сложной формы: ЛЧМ и т.д., ω*эмi соответствующей РЛС (7) с помощью последовательно электрически соединенных генератора (61) электромагнитных сигналов сложной формы, усилителя (62) электромагнитных сигналов сложной формы, коммутатора (54) режимов излучения и приемоизлучающей антенны (55) формируют, усиливают и непрерывно излучают электромагнитный сигнал сложной формы ω*эмi. При этом ось ХН приемоизлучающей антенны (55) наклоняют электрическим или механическим способом, ближе к поверхности воды.
При наличии под водой движущегося ПО отраженный от поднявшихся над ним из-под воды в воздух неоднородностей водной среды: ионизированных пузырьков воздуха и т.д., частично отраженный от них электромагнитный сигнал сложной формы ω*/ эмi принимают, усиливают, обрабатывают и анализируют его параметры в тракте (51) с помощью последовательно электрически соединенных приемоизлучающей антенны (55), коммутатора (56) режимов приема, предварительного усилителя (63) электромагнитных сигналов сложной формы, блока (64) обработки сигналов сложной формы, индикаторного устройства (65) и решающего устройства (60). При этом визуально отраженный от поднявшихся над ним из-под воды в воздух неоднородностей водной среды электромагнитный сигнал сложной формы ω*/ эмi представляет собой не яркую точечную отметку, как для импульсного электромагнитного сигнала ω/ эмi, а светящуюся менее ярко пространственную область кольцевой структуры типа бублик.
При этом:
1. Расширение области применения достигается за счет того, что в качестве ПО дополнительно используют ОПА, НПА и БМЖ.
2. Дальнее обнаружение акустически малозаметных - малошумных и со слабой отражающей способностью - ПО, в том числе в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации, достигается за счет того, что:
- дополнительно используют еще несколько контролируемых гидроакустических рубежей;
- дополнительно используют линейный режим излучения зондирующих сигналов в каждом стационарном активном ГАС;
- дополнительно используют линейный режим приема эхо-сигналов от ПО и шумов самого ПО в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС;
- дополнительно используют информацию о нарушениях естественной стратификации воздушной среды и границы раздела двух сред: вода-воздух, а также об искажениях параметров электромагнитных сигналов;
- дополнительно используют информацию о нарушениях естественной стратификации водной среды и искажениях параметров акустических сигналов, излученных ранее в соответствующих активных ГАС, а также излученных в соответствующих пассивных ГАС соответствующими блоками излучения ВЧ-сигналов накачки f3i;
- дополнительно в качестве рассеивателей звука используют ЗРС и газовые факелы и т.д.
3. Достоверная классификация акустически малозаметных - малошумных и со слабой отражающей способностью - ПО, в том числе в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации, достигается за счет того, что:
- дополнительно используют линейный режим излучения зондирующих сигналов в каждом стационарном активном ГАС;
- дополнительно используют линейный режим приема эхо-сигналов от ПО и шумов самого ПО в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС;
- дополнительно при классификации объекта используют информацию, содержащуюся в отраженных импульсных электромагнитных сигналах от корпуса надводного объекта или от неоднородностей среды, сформированных в воздухе движущимся под водой ПО;
- дополнительно используют информацию о нарушениях естественной стратификации воздушной среды и границы раздела двух сред: вода-воздух, а также об искажениях параметров электромагнитных сигналов;
- дополнительно используют информацию о нарушениях естественной стратификации водной среды и искажениях параметров акустических сигналов, излученных ранее в соответствующих активных ГАС, а также излученных в соответствующих пассивных ГАС соответствующими блоками излучения ВЧ-сигналов накачки f3i;
- дополнительно в качестве рассеивателей звука используют ЗРС и газовые факелы и т.д.
4. Точное определение пространственных координат акустически малозаметных - малошумных и со слабой отражающей способностью - ПО в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации, достигается за счет того, что:
- дополнительно используют еще несколько контролируемых гидроакустических рубежей;
- дополнительно используют линейный режим излучения зондирующих сигналов в каждом стационарном активном ГАС;
- дополнительно используют линейный режим приема эхо-сигналов от ПО и шумов самого ПО в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС;
- дополнительно в качестве рассеивателей звука используют ЗРС и газовые факелы и т.д.
5. Вытеснение ПО: ПД и БМЖ достигается за счет того, что:
- дополнительно при информационном воздействии на ПО используют сигналы ЗД и УЗД частот с амплитудой звукового давления выше 103 Па;
- дополнительно при энергетическом воздействии на ПО используют интенсивные сигналы ИЗД и ЗД диапазонов частот и т.д.
6. Повреждение элементов ПО: ОПА и НПА, в том числе систем их управления, достигается за счет того, что:
- дополнительно при энергетическом воздействии на ПО используют интенсивные сигналы ИЗД и ЗД диапазонов частот и т.д.
7. Обеспечение простоты способа и минимально финансовых затрат на его реализацию достигается за счет того, что:
- используют снятые с вооружения военно-морского флота РФ пассивные и активные ГАС;
- используют уже не применяемые в рыболовстве активные ГАС;
- нанотехнологии позволяют изготавливать дешевые блоки и т.д.
Отличительные от прототипа признаки заявляемого способа:
1. В качестве ПО дополнительно используют ОПА, НПА и БМЖ.
2. Дополнительно используют еще несколько - не менее двух - контролируемых гидроакустических рубежей, полностью перекрывающих по всей глубине и со всех сторон МНГП.
3. Дополнительно формируют и излучают в линейном режиме работы каждого стационарного активного ГАС ВЧ-сигнал на частоте ωi, при этом данные ГАС размещены на дне равномерно вокруг МНГП.
4. Дополнительно в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС с помощью соответствующего линейного блока принимают гидроакустические сигналы в ЗД и УЗД диапазонах частот Δωj, при этом данные ГАС размещены, соответственно, в толще воды и на дне вокруг МНГП последовательно в шахматном порядке.
5. Дополнительно формируют и направленно излучают над поверхностью воды импульсные электромагнитные сигналы на частотах ωэмi а также направленно принимают отраженные от надводных и воздушных объектов электромагнитные сигналы ω/ эмi с использованием нескольких РЛС, обеспечивая полное радиолокационное наблюдение вокруг МНГП.
6. Дополнительно при классификации объекта на классы надводный - подводный используют информацию, содержащуюся в отраженных импульсных электромагнитных сигналах на частотах ωэмi от корпуса надводного объекта или от неоднородностей среды, сформированных в воздухе движущимся под водой ПО.
7. Дополнительно формируют и направленно излучают над поверхностью воды непрерывные электромагнитные сигналы сложной формы на частотах ω*эмi, а также направленно принимают отраженные от неоднородностей воздушой среды, сформированных над поверхностью движущимся под водой ПО, электромагнитные сигналы на частотах ω*/ эмi с использованием нескольких РЛС, обеспечивая радиолокационное наблюдение вокруг МНГП.
8. Дополнительно при обнаружении и распознавании ПО используют информацию о нарушениях естественной стратификации воздушной среды и границы развела двух сред: вода-воздух, а также об искажениях параметров электромагнитных сигналов: амплитуда, фаза и т.д., за счет нелинейного взаимодействия волн различной физической природы: электромагнитных, гидродинамических и т.д., излученных ранее на частотах ωэмi.
9. Дополнительно при обнаружении и распознавании ПО используют информацию о нарушениях естественной стратификации водной среды и искажениях параметров акустических сигналов: амплитуда, фаза и т.д., за счет акустического затенения, акустической дифракции, нелинейном взаимодействии волн различной физической природы: акустических, гидродинамических, электромагнитных и т.д., излученных ранее на частотах: f1j, f2i и ωi - в соответствующих активных ГАС соответствующими блоками параметрического и линейного излучения ВЧ акустических сигналов, а также в соответствующих пассивных ГАС соответствующими блоками излучения ВЧ-сигналов накачки f3i, рассеянных на неоднородностях водной среды ВЧ-сигналов на частотах f/ 3i.
10. Дополнительно в качестве рассеивателей звука используют ЗРС и газовые факелы.
11. Дополнительно при энергетическом воздействии на ПО используют интенсивные - с амплитудой звукового давления на расстоянии 1 м от излучателя не менее 105 Па - НЧ-сигналы ИЗД и ЗД диапазонов частот.
12. Дополнительно при информационном воздействии на ПО используют сигналы ЗД и УЗД частот с амплитудой звукового давления не менее 103 Па.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признаки 1, 3, 4, 6-9 являются новыми.
Признаки 2, 5 и 10 являются известными. В то же время неизвестно их использование для обнаружения, распознавания и вытеснения ПО от МНГП.
Признаки 11 и 12 являются известными. В то же время неизвестно их использование для воздействия на БМЖ, ОПА и НПА.
Таким образом, наличие новых признаков в совокупности с известными обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - обеспечить дальнее обнаружение, достоверную классификацию и точное определение пространственных координат «акустически малозаметных» ПО в условиях повышенных окружающих шумов моря техногенного и природного происхождения, а также интенсивной реверберации; в вытеснении ПД, БМЖ, а также в повреждении элементов НПА, в том числе и систем управления, на ближней дистанции относительно простым способом при минимальных временных и финансовых затратах.
В данном случае имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
Пример реализации способа
Вначале следует заметить, что биологическое воздействие НЧ акустических колебаний на организм человека целенаправленно исследовался специалистами НИИ «Промышленной и морской медицины» Российской Военно-медицинской академии. В результате многолетних исследований было установлено, что частота 4 Гц неблагоприятно сказывается на работе сердца, частоты 6…7 Гц оказывают отрицательное влияние на работу головного мозга, 13 Гц вызывает расстройство желудка и т.д. [Довгуша В.В., Тихонов М.Н., Кудрин И.Д. Биологическое действие низкоинтенсивных экологических факторов на организм человека. - Экологические системы и приборы. - №1, 2002, с.37-39].
Работа выполнялась в период с 1999 г. по 2009 гг., в том числе: в 3-х промысловых рейсах в 2002 г., 2004 г. и 2005 г., - по управлению поведением касаток и сивучей в Охотском и Беринговом морях; ежегодно на промысле лосося ставными неводами на Западном и Восточном побережьях п-ова Камчатка, - по управлению поведением нерп, на специальном морском полигоне - по управлению поведением подводных пловцов и т.д.
На фиг.3 иллюстрируется внешний вид плоско-поворотной антенны, входящей в состав стационарной активной ГАС с ПИА. В конструкцию включены двигатели, обеспечивающие механическое сканирование антенны в вертикальной и горизонтальной плоскостях. При этом в качестве излучающих элементов данной антенны использовали электроакустические преобразователи снятого с вооружения ВМФ РФ ГАС МГ-7.
На фиг.4 иллюстрируется внешний вид пассивной ГАС с ППА, способной к установке в стационарном и автономном вариантах и у которой ХН в горизонтальной плоскости вращается механическим способом. При этом в качестве приемных элементов данной антенны использовали электроакустические преобразователи снятого с вооружения ВМФ РФ ГАС МГ-7, а антенное устройство со стабилизаторами глубины, а также индикаторное устройство и часть блоков линейной обработки сигналов - от снятой с вооружения ВМФ РФ ГАС-329.
На фиг.5 иллюстрируется внешний вид автономной пассивной ГАС с ППА, у которой осуществляется электронное сканирование ХН. При этом в качестве базовой использовали конструкцию снятого с вооружения ВМФ РФ авиационного буя БМ-3.
На фиг.6 иллюстрируется внешний вид акустической системы энергетического и информационного воздействия на ПО. Данная акустическая система была разработана в Гидрофизическом Центре г.Владивосток под научным руководством д.ф.-м.н. Ю.В. Матвиенко и обеспечивает излучение гидроакустических сигналов в диапазоне частот от 10 Гц до 100 кГц.
На фиг.7 иллюстрируется внешний вид ГАС с ПИА и ППА, изготовленной на базе снятой с вооружения ВМФ РФ ГАС-329 и способной к установке в стационарном и автономном вариантах. При этом ХН антенны в горизонтальной плоскости вращается механическим способом.
На фиг.8 иллюстрируется внешний вид стационарной пассивной ГАС с ППА, изготовленной на базе, снятой с вооружения ВМФ ГАС-10М, и у которой сканирование ХН в горизонтальной плоскости осуществляется электронным образом.
На фиг.9 иллюстрируется усилитель мощности, использованной для усиления информационных сигналов воздействия на ПО.
На фиг.10 иллюстрируется усилитель мощности, используемый для усиления энергетических сигналов воздействия на ПО.
Для примера на фиг.11 представлен отклик ППА в составе пассивной ГАС, изготовленной на базе снятой с вооружения ВМФ РФ ГАС МГ-329, с диаметром приемного элемента 600 мм при его механическом сканировании в горизонтальной плоскости в процесс пеленгования НЧ-сигнала 28,5 Гц. Как видно из фиг.11, острота главного максимума ХН на уровне «-3» дБ составляет величину ~20 градусов при частоте ВЧ-сигнала накачки 15,5 кГц. Следует заметить, что прямой сигнал данной частоты (длины волны) вообще не может попасть в приемный тракт ГАС. В параметрическом же режиме работы данного ГАС с ППА обеспечивается направленный прием сигнала с соотношением С/П, составляющим около 40 дБ. Другими словами, данное ГАС стало выполнять функции, не предусмотренные при ее разработке.
На фиг.12 представлена спектрограмма ВЧ гармонического сигнала накачки на частоте f3=15,5 кГц, зарегистрированного на входе ГАС с ППА при пеленговании шумового источника НЧ подводных сигналов в диапазоне частот от единиц Гц до единиц кГц. Как видно из фиг.12, форма сигнала в этом случае стала представлять собой колокол, а не отдельную дискретную составляющую. Данное обстоятельство свидетельствует о нелинейном взаимодействии ВЧ-сигнала накачки с шумами ПО.
На фиг.13 представлена спектрограмма сигналов ПО, зарегистрированная на выходе тракта параметрического приема НЧ-сигналов стационарной пассивной ГАС. Как видно из фиг.13, в параметрическом режиме работы данной стационарной ГАС удалось зарегистрировать НЧ-шумоизлучение ПО в диапазоне частот от 0,45 Гц и выше.
На фиг.14 представлена спектрограмма сигналов ПО, зарегистрированная на выходе тракта параметрического приема НЧ-сигналов автономной пассивной ГАС. Как видно из фиг.14, в параметрическом режиме работы данной автономной ГАС удалось зарегистрировать не только отдельные дискретные составляющие (ДС ДС), но и области возмущений (черные пятна на фиг.14) в НЧ-диапазоне частот от долей Гц и выше.
При этом:
1. Расширение области применения достигнуто за счет того, что в качестве ПО дополнительно использовали ОПА, НПА и БМЖ.
2. Дальнее обнаружение акустически малозаметных - малошумных и со слабой отражающей способностью - ПО, в том числе в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации, достигнуто за счет того, что:
- дополнительно использовали еще несколько контролируемых гидроакустических рубежей;
- дополнительно использовали линейный режим излучения зондирующих сигналов в каждом стационарном активном ГАС;
- дополнительно использовали линейный режим приема эхо-сигналов от ПО и шумов самого ПО в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС;
- дополнительно использовали информацию о нарушениях естественной стратификации воздушной среды и границы раздела двух сред: вода-воздух, а также об искажениях параметров электромагнитных сигналов;
- дополнительно использовали информацию о нарушениях естественной стратификации водной среды и искажениях параметров акустических сигналов, излученных ранее в соответствующих активных ГАС, а также излученных в соответствующих пассивных ГАС соответствующими блоками излучения ВЧ-сигналов накачки f3i;
- дополнительно в качестве рассеивателей звука использовали ЗРС и газовые факелы и т.д.
3. Достоверная классификация акустически малозаметных - малошумных и со слабой отражающей способностью - ПО, в том числе в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации, достигнута за счет того, что:
- дополнительно использовали линейный режим излучения зондирующих сигналов в каждом стационарном активном ГАС;
- дополнительно использовали линейный режим приема эхо-сигналов от ПО и шумов самого ПО в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС;
- дополнительно при классификации объекта использовали информацию, содержащуюся в отраженных импульсных электромагнитных сигналах от корпуса надводного объекта или от неоднородностей среды, сформированных в воздухе движущимся под водой ПО;
- дополнительно использовали информацию о нарушениях естественной стратификации воздушной среды и границы раздела двух сред: вода-воздух, а также об искажениях параметров электромагнитных сигналов;
- дополнительно использовали информацию о нарушениях естественной стратификации водной среды и искажениях параметров акустических сигналов, излученных ранее в соответствующих активных ГАС, а также излученных в соответствующих пассивных ГАС соответствующими блоками излучения ВЧ-сигналов накачки f3i;
- дополнительно в качестве рассеивателей звука использовали ЗРС и газовые факелы и т.д.
4. Точное определение пространственных координат акустически малозаметных - малошумных и со слабой отражающей способностью - ПО в условиях повышенных окружающих шумов моря, техногенного и природного, а также интенсивной реверберации достигнуто за счет того, что:
- дополнительно использовали еще несколько контролируемых гидроакустических рубежей;
- дополнительно использовали линейный режим излучения зондирующих сигналов в каждом стационарном активном ГАС;
- дополнительно использовали линейный режим приема эхо-сигналов от ПО и шумов самого ПО в каждом автономном пассивном ГАС и в каждом стационарном пассивном ГАС;
- дополнительно в качестве рассеивателей звука использовали ЗРС и газовые факелы и т.д.
5. Вытеснение ПО: ПД и БМЖ достигнуто за счет того, что:
- дополнительно при информационном воздействии на ПО использовали сигналы ЗД и УЗД частот с амплитудой звукового давления выше 103 Па;
- дополнительно при энергетическом воздействии на ПО использовали интенсивные сигналы ИЗД и ЗД диапазонов частот и т.д.
6. Повреждение элементов ПО: ОПА и НПА, в том числе систем их управления, достигнуто за счет того, что:
- дополнительно при энергетическом воздействии на ПО использовали интенсивные сигналы ИЗД и ЗД диапазонов частот и т.д.
7. Обеспечение простоты способа и минимально финансовых затрат на его реализацию достигнуто за счет того, что:
- использовали снятые с вооружения военно-морского флота РФ пассивные и активные ГАС;
- использовали уже не применяемые в рыболовстве активные ГАС;
- нанотехнологии позволили изготовить дешевые блоки и т.д.





Изобретение относится к области акустики и может быть использовано в прикладной гидроакустике: для защиты морских нефтегазовых платформ (МНГП), подводных хранилищ углеводородного сырья и специализированных судов; водозаборных сооружений электростанций, в том числе атомных, от проникновения потенциально опасных подводных объектов (ПО): подводных диверсантов (ПД), боевых морских животных (БМЖ), обитаемых (ОПА) и необитаемых (НПА) подводных аппаратов, а также в рыбной промышленности: для защиты водозаборных сооружений различных технических сооружений от проникновения морских биологических объектов (МБО) - рыб, рачков, медуз и др., а также для контроля прохода промысловых скоплений МБО через заданный рубеж. Задача, которая решается изобретением, заключается в обнаружении, достоверном распознавании (классификации) и точном определении пространственных координат «акустически малозаметных» - с малым уровнем подводных акустических шумов и слабой акустической отражательной способностью - ПО в условиях повышенных окружающих шумов моря, техногенного: работы механизмов МНГП и т.д., и природного: шумы и звуки МБО и т.д., происхождения и интенсивной реверберации из-за биологических звукорассеивающих слоев (ЗРС), газовых факелов и т.д. 14 ил.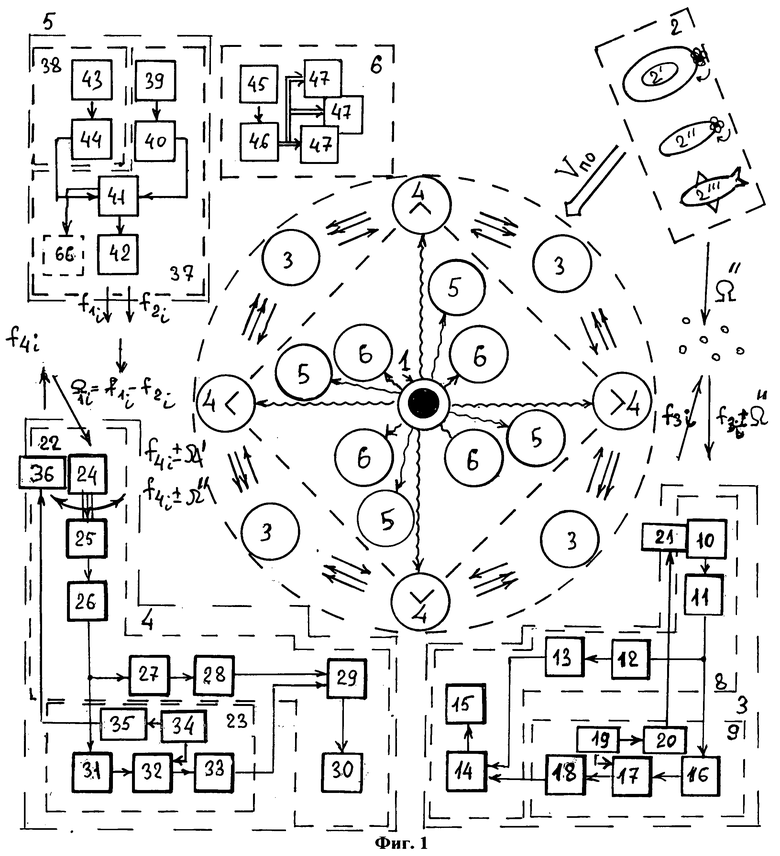
Способ обнаружения, распознавания и вытеснения подводных объектов от морской нефтегазовой платформы, заключающийся в размещении на одной стороне первого контролируемого гидроакустического рубежа первого гидроакустического средства с блоком параметрического излучения низкочастотных сигналов, а на противоположной стороне первого контролируемого гидроакустического рубежа первого гидроакустического средства с первым блоком параметрического приема низкочастотных сигналов, в обнаружении - по превышению уровня сигнала над уровнем помехи, в распознавании - сравнении принятого сигнала с эталонным сигналом и в оценки координат - пеленга и дистанции подводного объекта, а также в воздействии на подводный объект низкочастотными сигналами и вытеснении его из заданного водного пространства, при этом первое параметрическое направленное излучение низкочастотных сигналов осуществляют путем формирования, усиления и направленного излучения двух первых высокочастотных сигналов накачки на частотах f1i и f2i, близких к резонансной частоте f0 рассеивателей звука, нелинейном взаимодействии высокочастотных сигналов накачки с образованием первого низкочастотного сигнала разностной частоты Ω1i=f1i-f2i, распространяющегося направленно в водной среде, при этом первый направленный параметрический прием низкочастотных сигналов осуществляют путем формирования, усиления и ненаправленного излучения высокочастотного сигнала накачки на частоте f3i, близкой к резонансной частоте рассеивателей звука, рассеянии на неоднородностях водной среды и нелинейном взаимодействии высокочастотного сигнала накачки на частоте f'3i с первым низкочастотным сигналом разностной частоты, отраженного от подводного объекта Ω1i', а также с низкочастотным сигналом собственного шумоизлучения подводного объекта на частоте Ω” с образованием высокочастотных волн комбинационных f'3i±Ω1i' и f'3i±Ω”, распространяющихся в сторону первого гидроакустического средства с первым блоком параметрического приема низкочастотных сигналов; в выделении низкочастотных сигналов на частотах Ω1j' и Ω” из высокочастотных сигналов комбинационных частот f'3i±Ω1i' и f'3i±Ω” методом детектирования, отличающийся тем, что в качестве подводного объекта дополнительно используют боевое морское животное, а также обитаемый или необитаемый подводный аппарат; дополнительно используют еще несколько - не менее двух, контролируемых гидроакустических рубежей, полностью перекрывающих по периметру со всех сторон и по всей глубине морскую нефтегазовую платформу; каждое гидроакустическое средство с блоком параметрического излучения низкочастотных сигналов дополнительно содержит блок линейного излучения высокочастотных сигналов на частоте ωi (i=1, 2, 3…n), равной f1i; при этом данные гидроакустические средства размещены на дне равномерно вокруг морской нефтегазовой платформы; каждое гидроакустическое средство с блоком параметрического приема низкочастотных сигналов дополнительно содержит блок линейного приема сигналов звукового и ультразвукового диапазонов в диапазоне частот Δωj (j=1, 2, 3…n), при этом данные гидроакустические средства размещены на дне и в толще воды вокруг морской нефтегазовой платформы последовательно в шахматном порядке; дополнительно формируют, усиливают и направленно излучают над поверхностью воды электромагнитные сигналы на частотах ωэм1i (i=1, 2, 3…n), а также направленно принимают отраженные от надводных объектов и электромагнитных неоднородностей воздушной среды, сформированных над поверхностью воды движущимся под водой подводным объектом, электромагнитные сигналы на частотах ω'эм1i (i=1, 2, 3…n) с использованием нескольких - не менее трех - радиолокационных средств, обеспечивая при этом полное радиолокационное наблюдение вокруг морской нефтегазовой платформы; дополнительно при обнаружении используют информацию о нарушениях естественной стратификации среды и искажениях параметров акустических сигналов: амплитуды, фазы и т.д., за счет акустического затенения, акустической дифракции, нелинейном взаимодействии волн различной физической природы: акустических, гидродинамических, электромагнитных и т.д., излученных ранее на частотах f1i, f2i и ωi - излученных в соответствующих активных гидроакустических средствах соответствующими блоками параметрического и линейного излучения высокочастотных акустических сигналов, а также в соответствующих пассивных гидроакустических средствах соответствующими блоками излучения высокочастотных сигналов накачки f3i, рассеянных на неоднородностях водной среды высокочастотных сигналов на частотах f'3i, и о нарушениях естественной стратификации среды и искажениях параметров электромагнитных сигналов: амплитуды, фазы и т.д., за счет нелинейного взаимодействия волн различной физической природы: электромагнитных, гидродинамических и т.д., излученных ранее на частотах ωэм1i; дополнительно при распознавании объекта на классы надводный - подводный используют информацию, содержащуюся в отраженном электромагнитном сигнале на частотах ω'эм1i от корпуса надводного объекта или от неоднородностей среды, сформированных в воздухе движущимся под водой подводным объектом; дополнительно в качестве рассеивателей звука используют биологические звукорассеивающие слои и газовые факелы; дополнительно при энергетическом воздействии на подводный объект используют интенсивные - с амплитудой звукового давления на расстоянии 1 м от излучателя не менее 105 Па - низкочастотные сигналы инфразвукового и звукового диапазонов частот; дополнительно при информационном воздействии на подводный объект используют сигналы звукового и ультразвукового диапазонов частот с амплитудой звукового давления не менее 103 Па.
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И ВЫТЕСНЕНИЯ ПЛОВЦОВ И МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ ОТ СИСТЕМЫ ВОДОЗАБОРА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2003 |
|
RU2256196C2 |
| СПОСОБ ДАЛЬНЕГО ОБНАРУЖЕНИЯ И ОТПУГИВАНИЯ КИТОВ ОТ СКОРОСТНЫХ ПАССАЖИРСКИХ СУДОВ | 2007 |
|
RU2342680C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| US 5594451 А, 14.01.1997 | |||
| JP 9269369 A, 14.10.1997. | |||

