Изобретение относится к медицинской технике, в частности к устройствам и приспособлениям, предназначенным для испытаний протезных изделий на эксплуатационную прочность, и может быть использовано для ресурсных и ускоренных испытаний указанных изделий при отработке новых конструкций и материалов их основных деталей.
Известно устройство для испытания протезов бедра на долговечность (авт. св. N 157824, кл. А 61 F 2/76, 1963), содержащее платформу, установленную на роликах и приводимую в возвратно-поступательное движение посредством кривошипно-шатунного механизма. Платформа служит опорой для испытуемого протеза, закрепленного на толкателе, который установлен в шарнире с возможностью осевого перемещения и качания в плоскости движения платформы. Через толкатель при помощи ролика испытуемый протез поджимается нажимной пластиной к платформе. Усилие поджатия регулируется винтом. Таким образом, величина сил, действующих на протез, обусловлена затяжкой пружины, а закон изменения их в течение цикла нагружения определяется профилем нажимной пластины.
Недостатком этого устройства является несоответствие закона нагружения протеза во время испытаний (синусоидальный закон нагружения) реальным условиям: отсутствует полная разгрузка, соответствующая переносу ноги. Кроме того, в данном устройстве затруднена переналадка, осуществляемая заменой нажимной планки, изменение закона нагружения, и кривошипа изменение длины шага.
Известно устройство для испытания протезов бедра (Клименко Н.И. Число циклов нагружения протезов бедра, Протезирование и протезостроение. М. 1960, вып. III (VII)). Нагружение протеза в этом устройстве в опорный период шага задается при помощи шестизвенного механизма, приводимого от электродвигателя через клиноременную передачу и редуктор. Протез устанавливается на опорную доску, причем точка его подвеса может перемещаться по вертикали, вызывая поджатие пружины и обеспечивая этим нагружение испытуемого протеза силой заданной величины. Регулировка положения точки подвеса, т.е. усилия затяжки пружины нагружения, осуществляется с помощью специального приспособления. Переносный период шага на данном стенде имитируется при помощи штанги, выходящей из зацепления с роликом в крайнем положении опорной доски и отключающейся вместе с бедром под действием пружины.
К недостаткам этого устройства следует отнести жесткую зависимость (невозможность изменения) закона нагружения протеза в опорный период шага от геометрии шестизвенного механизма. В этом стенде не предусмотрено регулирование изгибающего момента во фронтальной плоскости и торсионного момента.
Известно устройство [1] включающее опорную площадку, на которую опирается испытуемый протез и которая установлена на платформе с возможностью поворота вокруг горизонтальной и вертикальной осей. Такая конструкция дает возможность создать в опорный период шага торсионный момент (поворачивая опорную площадку вокруг вертикальной оси) и изгибающий момент во фронтальной плоскости (поворачивая опорную площадку вокруг горизонтальной оси), а также позволяет изменять эти моменты.
Данному устройству присущи основные недостатки, аналогичные вышеперечисленным, а именно несоответствие законов нагружения протеза во время испытаний реальным условиях эксплуатации, так как механизм создания сил нагружения не позволяет их воспроизводить или изменять. Кроме того, в таких устройствах наблюдается искажение заданной формы цикла нагружения, вызываемое упругими несовершенствами испытуемого изделия.
Цель изобретения компенсация искажений, вносимых упругими несовершенствами образца и другими причинами в форму рабочего цикла, т.е. повышение точности воспроизведения заданного закона нагружения испытуемого протеза бедра достигается тем, что устройство снабжено задатчиками формы, амплитуды и частоты повторения рабочих циклов силового динамического нагружения и управляемыми сигналами рассогласования электрогидравлическими усилителями, выходные каналы которых соединены с полостями исполнительных силовых гидроцилиндров.
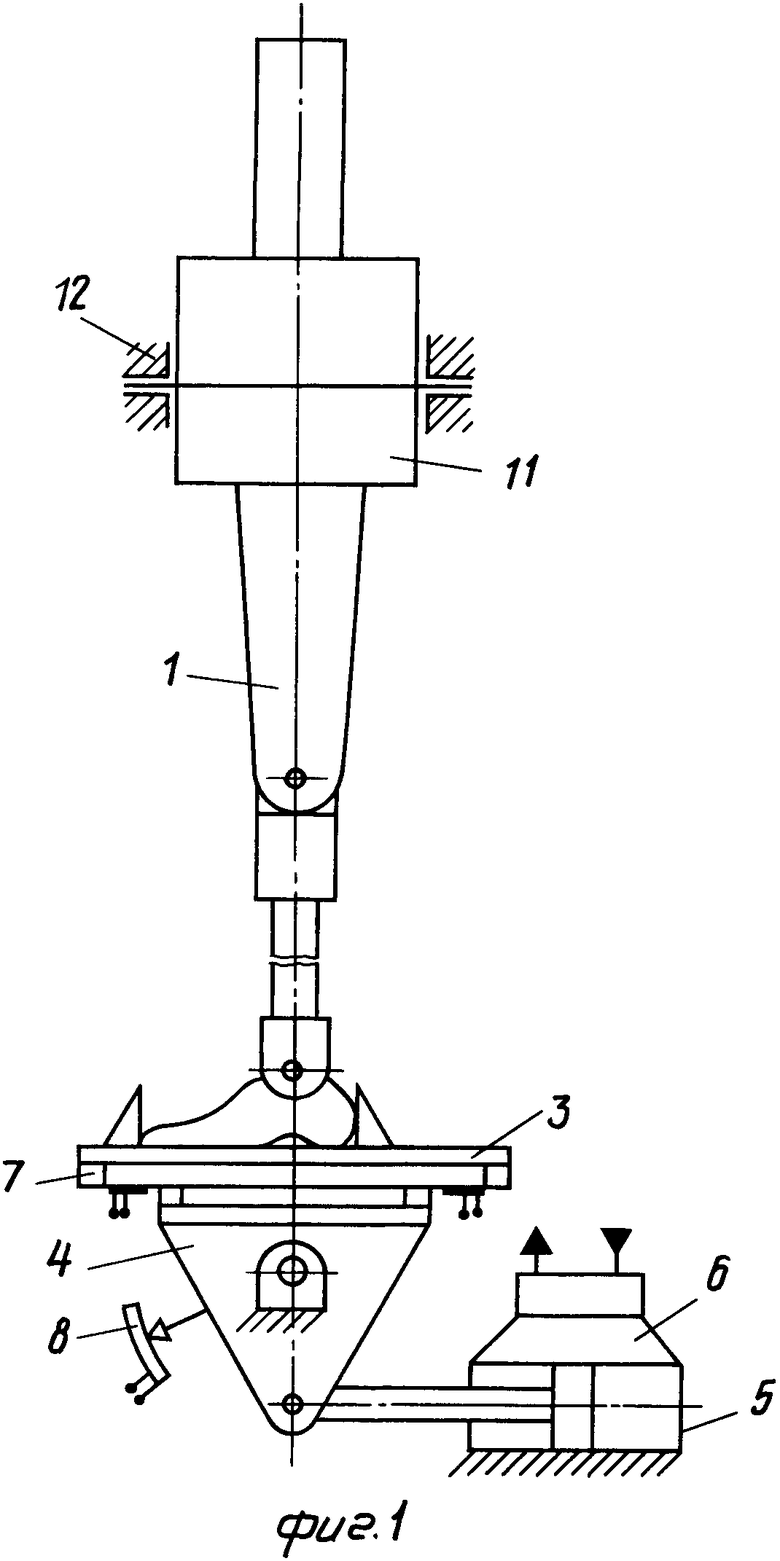
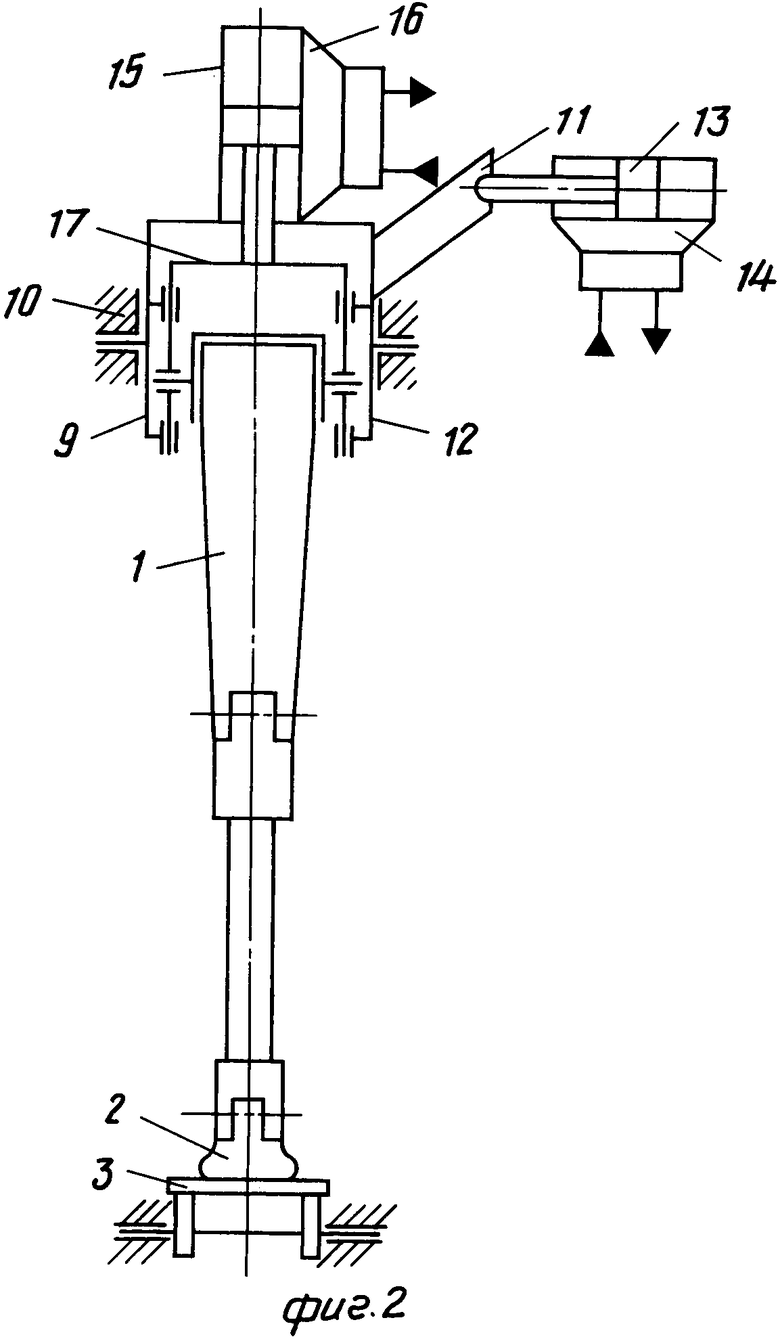
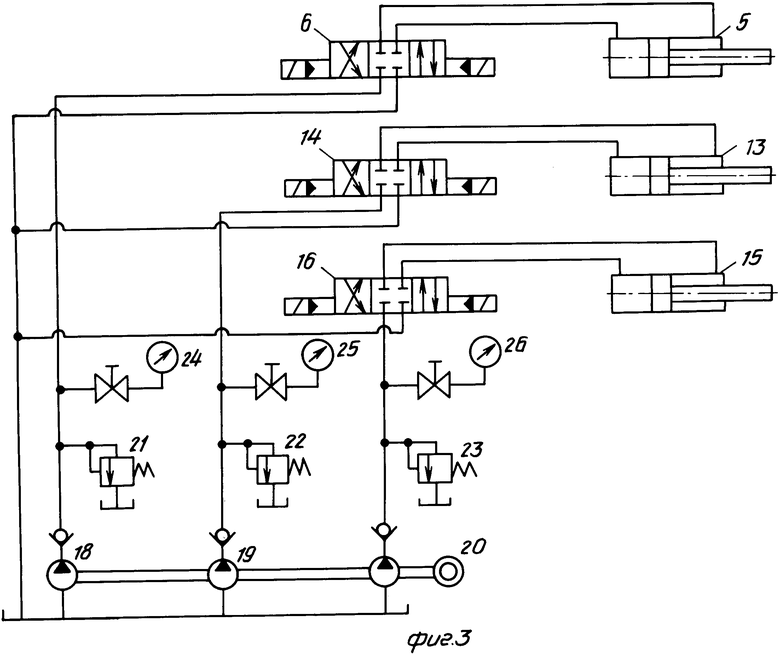
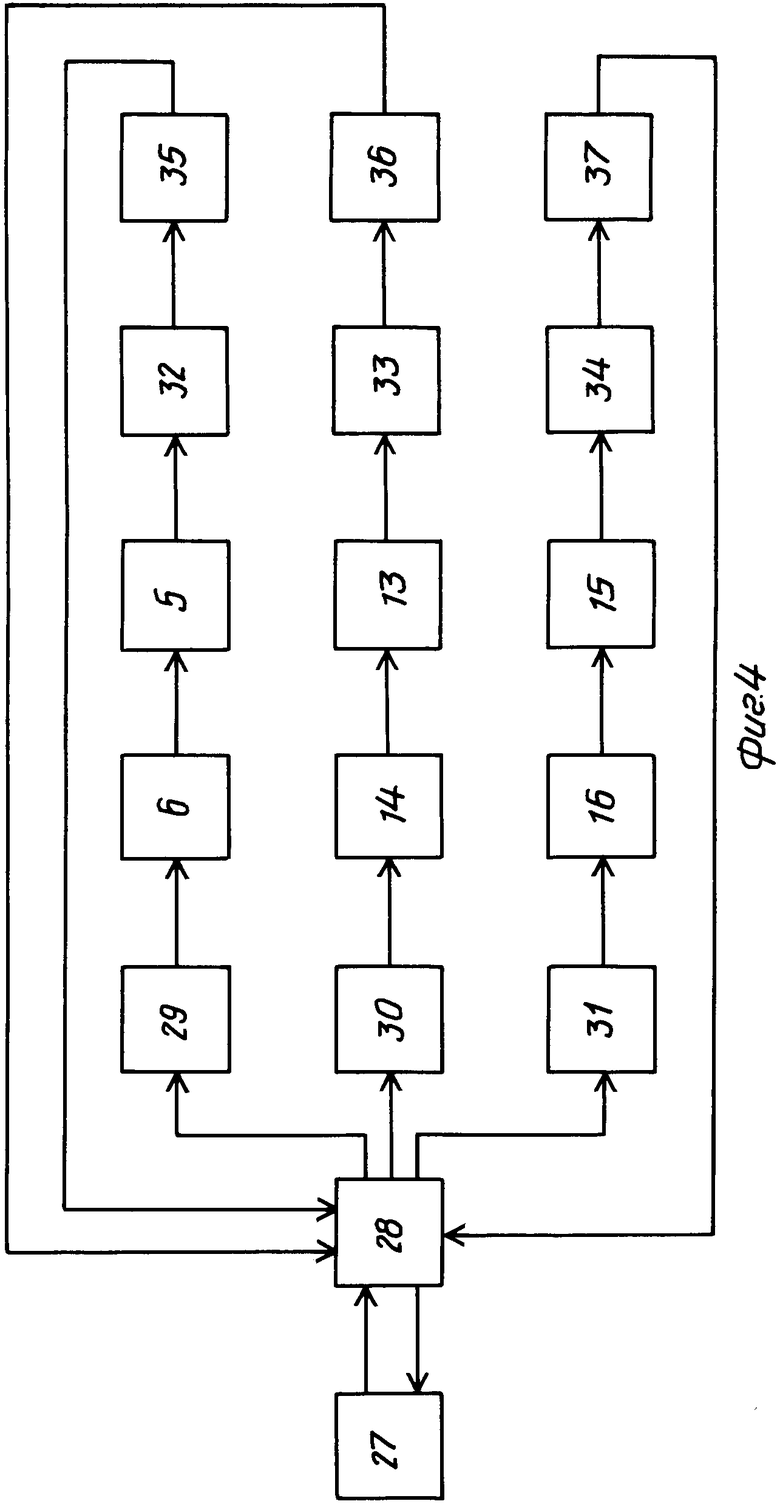
На фиг. 1, 2 представлена конструктивная схема предлагаемого устройства для испытания протезов бедра на эксплуатационную прочность; на фиг. 3 изображена принципиальная схема электрогидравлического привода узлов динамического нагружения; на фиг. 4 блок-схема системы дистанционного автоматического управления электрогидравлическим приводом.
Устройство содержит испытуемый протез 1 бедра, стопа 2 которого установлена на опорную площадку 3. Качание опорной площадки 3 осуществляется через поворотный сектор 4 силовым гидроцилиндром 5, управляемым электрогидравлическим усилителем 6. Датчики поворота и усилий, соответственно 7 и 8, фиксируют изменения кинематических и динамических параметров, имеющие место при осуществлении поворота опорной площадки. Верхняя часть протеза закреплена в специальной головке 9, которая установлена в цапфах 10, что позволяет ей качаться в сагиттальной плоскости при качании стопы 2. Через рычаг 11, закрепленный на обойме 12 головки 9, силовой гидроцилиндр 13, управляемый электрогидравлическим усилителем 14, осуществляет ротационные нагружения протеза 1. Осевое нагружение создает силовой гидроцилиндр 15, управляемый электрогидравлическим усилителем 16, на штоке которого закреплена вилка 17 с возможностью осевых перемещений относительно корпуса головки 9. Узлы ротационного и осевого нагружения оснащены датчиками поворота или продольного перемещения, а также датчиками усилий нагружения (на конструктивной схеме эти датчики не показаны).
На фиг. 3 изображена принципиальная схема электрогидравлического привода устройства, который включает насосную установку с тремя приводными гидронасосами 18-20, которые посредством напорных гидролиний соединены через электрогидравлические усилители 6, 14 и 16 с соответствующими им силовыми гидроцилиндрами поворота опорной площадки 5, ротационного нагружения 13 и осевого нагружения 15. Кроме того, каждый электрогидравлический усилитель гидролиниями связан с поршневой и штоковыми полостями гидроцилиндров 5, 13, 15, а также со сливной магистралью. В каждой из напорных магистралей установлены предохранительно-переливные клапаны 21-23, а также манометры 24-26 контроля давления.
Блок-схема системы дистанционного автоматического управления электрогидравлическим приводом (фиг. 4) включает задатчик 27 формы, амплитуды и частоты повторения рабочих циклов нагружения персональную электронно-вычислительную машину (ПЭВМ), микропроцессорный контроллер 28, который через цифроаналоговые преобразователи 29-31 связан с электрогидравлическими усилителями 6, 14 и 16, осуществляющими управление рабочим циклом нагружения с помощью силовых гидроцилинлров 5, 13 и 15. Силовые и подвижные элементы предлагаемой установки посредством семейства датчиков 32-34 поворота или перемещений и усилий установлены по каждому направлению и связаны через аналого-цифровые преобразователи 35-37 с микропроцессорным контроллером 28 и ПЭВМ 27.
Работа устройства для испытания протезов бедра на эксплуатационную прочность осуществляется в соответствии с заданной программой и режимами нагружений. Устройство позволяет осуществлять при независимых движениях выполняемые по заданным законам и позволяющие имитировать нагружения протеза в процессе ходьбы, а также форсированные режимы.
Для создания циклического нагружения с пульта ПЭВМ 27 по заданной программе производится пуск насосной установки, в результате чего приводные гидронасосы 18-20 нагнетают рабочую жидкость в напорные магистрали гидролинии, связывающие их через электрогидравлические усилители 6, 14 и 16 с исполнительными силовыми гидроцилиндрами 5, 13 и 15 нагружения. На электронные блоки управления электрогидравлическими усилителями подаются управляющие электрические сигналы, изменяющиеся по заданной программе, согласно которой происходит изменение давлений в поршневых и штоковых полостях силовых гидроцилиндров 5, 13 и 15, вызывая этим их соответствующее перемещение или изменение усилия нагружения. При этом будет циклически происходить поворот-качание опорной площадки 3, на которой установлена стопа 2 испытуемого протеза 1, а также его осевое и ротационное нагружение.
Задавая посредством ПЭВМ 27 и других электронных узлов различные режимы нагружения, можно в широких пределах изменять частоту повторения циклических нагружений по всем направлениям. В результате этого можно будет имитировать реальные условия эксплуатации протезов, производить их форсированные испытания при отработке их конструктивных элементов и материалов основных деталей. Плавные программируемые изменения изгибающих и торсионных моментов в необходимых плоскостях позволяют достоверно воспроизводить нагрузки на протез при ходьбе.
В процессе испытаний могут наблюдаться искажения заданного закона нагружения, вносимые упругими несовершенствами деталей протеза и другими причинами в форму рабочего цикла, которые будут фиксироваться соответствующими датчиками перемещений, поворота или усилий и передаваться в виде электрических сигналов на обработку в ПЭВМ 27. Благодаря такой обратной связи будет происходить соответствующая корректировка закона управления режимами нагружения с целью повышения точности воспроизведения заданных законов нагружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез нижней конечности | 1983 |
|
SU1175471A1 |
| СПОСОБ ИМИТАЦИИ ХОДЬБЫ И БЕГА ЧЕЛОВЕКА ДЛЯ РЕАБИЛИТАЦИИ БОЛЬНЫХ С РАЗЛИЧНЫМИ ДВИГАТЕЛЬНЫМИ НАРУШЕНИЯМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2082378C1 |
| Коленный механизм протеза бедра | 1983 |
|
SU1124964A1 |
| ГЛУБИННЫЙ ВИБРОУПЛОТНИТЕЛЬ | 1992 |
|
RU2049663C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032434C1 |
| ПРОТЕЗ БЕДРА | 1992 |
|
RU2043091C1 |
| ПРОТЕЗ БЕДРА | 1993 |
|
RU2049446C1 |
| КИНЕМАТИЧЕСКИЙ ШАРНИР КОЛЕННОГО УЗЛА ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1992 |
|
RU2061443C1 |
| Валец вибрационного катка | 1988 |
|
SU1608282A1 |
| Прицепная гидроинерционная вибротрамбовка | 1991 |
|
SU1796735A1 |
Использование: изобретение относится к медицинской технике, в частности к устройствам и приспособлениям, предназначенным для испытаний протезных изделий на эксплуатационную прочность, и может быть использовано для ресурсных и ускоренных испытаний указанных изделий при обработке новых конструкций и материалов их основных деталей. Существо изобретения: устройство содержит опорную площадку с поворотным сектором, силовой гидроцилиндр, управляемый электрогидравлическим усилителем. Датчики поворота и усилий фиксируют изменение кинематических и динамических параметров. Головка установлена в цапфах. 4 ил.
УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРОТЕЗОВ БЕДРА НА ЭКСПЛУАТАЦИОННУЮ ПРОЧНОСТЬ, содержащее опорную площадку для размещения испытуемого протеза, установленную на платформе с возможностью поворота вокруг горизонтальной и вертикальной осей, механизм поворота опорной площадки, механизмы осевого и ротационного нагружения с головкой для крепления протеза, отличающееся тем, что оно снабжено задатчиками формы, амплитуды и частоты повторения рабочих циклов силового динамического нагружения, причем механизмы поворота опорной площадки, осевого и ротационного нагружения выполнены в виде исполнительных силовых гидроцилиндров, соединенных соответственно с опорной площадкой и головкой, и управляемых электрогидравлических усилителей, выходные каналы которых соединены с полостями исполнительных силовых гидроцилиндров, при этом задатчики формы, амплитуды и частоты соединены с управляемыми электрогидравлическими усилителями.
| Устройство для испытания протеза бедра на долговечность | 1987 |
|
SU1477402A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
