Изобретение относится к способам передачи данных по каналам связи и может быть использовано для построения устройств приема сигналов с угловой модуляцией, а именно с частотой и фазовой манипуляцией.
Цель изобретения заключается в расширении функциональных возможностей способа приема сигналов с частотой и фазовой модуляцией, повышении достоверности принимаемых сигналов.
Способ основан на однозначной связи изменений фазы (и частоты) модулированного сигнала и его периода и включает в себя перенос спектра модулированного радиосигнала в область низких частот, проведение множества измерений периода преобразованного модулированного сигнала (через измерение интервалов времени, кратных периоду) в тактируемые моменты времени.
Для достижения поставленной цели производят измерение интервалов времени, кратных периоду модулированного сигнала, в тактируемые моменты времени с известным периодом тактирования и с перекрытием измеряемых интервалов времени, коэффициент кратности выбирают из условия:
0,5 ˙Тм > Тии > τип > τпп (1) где τпп длительность переходных процессов при модуляции;
Тм период модуляции;
Тии длительность измеренных интервалов времени;
τип длительность перекрывающих частей измеренных интервалов; значения измеренных интервалов последовательно запоминают с привязкой к соответствующим тактовым интервалам и далее осуществляют демодуляцию сигнала и дешифрацию переданного сообщения, используя распределение во времени полученной последовательности измеренных значений и связь этого распределения с характером угловой модуляции и кодирования переданного сообщения.
Фиг. 1-4 поясняют сущность предлагаемого способа применительно к различным видам угловой модуляции.
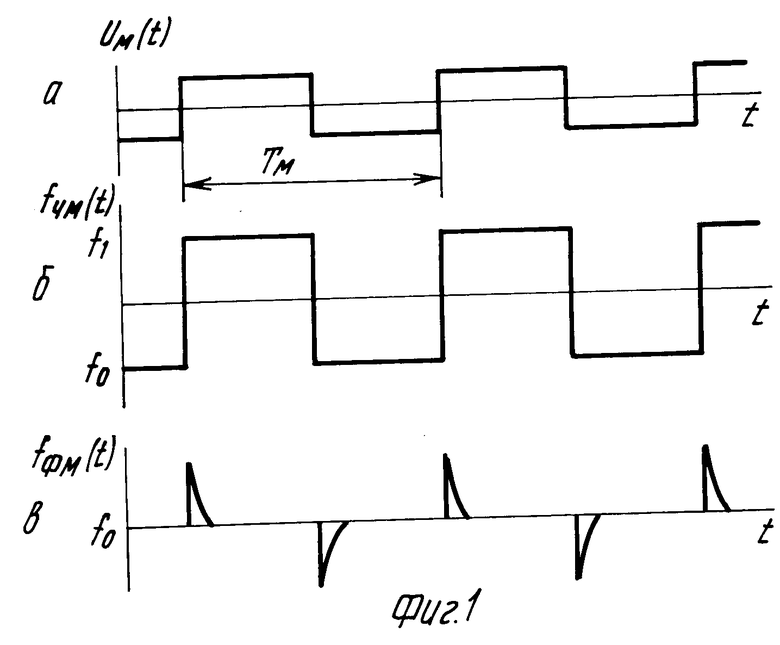
Как показано на фиг. 1, измерения частоты модулированного сигнала под воздействием модулирующего сигнала (фиг.1,а) носят различный характер при различных видах угловой модуляции: частотной манипуляции (фиг.1,б) и фазовой манипуляции (фиг.1,в). При частотной манипуляции (ЧМ) изменения частоты полностью повторяют изменения модулирующего сигнала. Измеряя, в соответствии с предложенным способом, интервалы времени Тии, кратные периоду Т модулированного сигнала Тии nТ, где n коэффициент кратности, проводя эти измерения в тактируемые моменты времени с известным периодом тактирования Ттакм и последовательно запоминая результаты измерений, с привязкой к соответствующим тактовым интервалам получают последовательность результатов измерений Тии во времени. Определяя по результатам измерений период Т Тии/n и частоту
f + 1/T n/Tии (2) модулированного сигнала, получают соответственно распределение во времени изменений этой частоты, используя которое, осуществляют демодуляцию ЧМ-сигнала аналогично известному способу и дешифрацию переданного сообщения. Демодуляцию ЧМ-сигнала можно осуществлять и по исходной последовательности измеренных интервалов Тии, однозначно связанных со значениями частоты f соотношением (2), используя полученное распределение значений Тии по времени.
При фазовой манипуляции (фиг.1,в) частота модулированного сигнала испытывает кратковременные изменения при "скачках" фазы, длительность которых определяется переходными процессами переключения фазы при модуляции. Соответствующие изменения будут испытывать и измеряемые в соответствии с предложенным способом интервалы Тии, кратные периоду Т 1/f модулированного сигнала.
Как показано на фиг. 2, любое изменение фазы Δϕ при угловой модуляции сигнала приводит к пропорциональному изменению измеряемого интервала Тии, кратному периоду Т модулированного сигнала:
Δϕ  t
t  t
t
(3) где Δ t Тии nTo,
То период немодулированного сигнала.
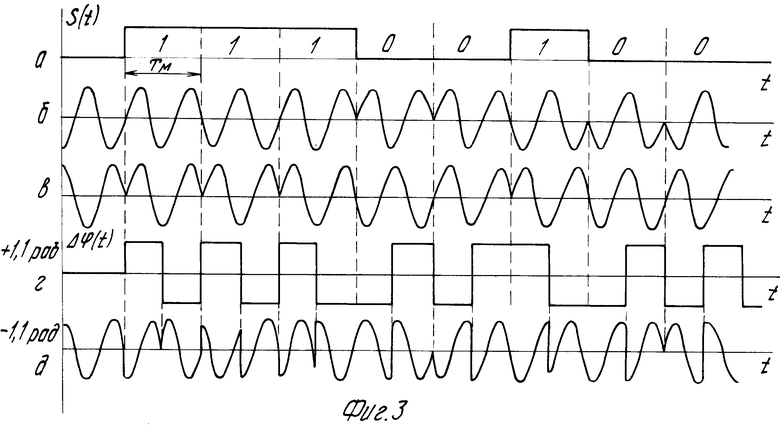
На фиг. 3 показаны диаграммы изменения ФМ-сигналов при различном характере фазовой манипуляции при воздействии модулирующего (двоичного) телеграфного сигнала (фиг.3,а). На диаграмме 3,б показан сигнал, фаза которого скачкообразно изменяется при всяком переходе к нулевому уровню (от "1" к "0" или от "0" к "0") в модулирующем телеграфном сигнале, а на диаграмме 3,в показан сигнал, фаза которого скачкообразно изменяется при переходах к единичному уровню (от "0" к "1" или от "1" к "1") в модулирующем телеграфном сигнале. Скачки фазы при таком формировании ФМ-сигнала происходят не чаще, чем один раз за период Тм модулирующего воздействия, а величина этих скачков обычно равна π (180о фазоразностная модуляция).
На диаграмме фиг. 3,г приведена модулирующая функция изменения фзы для ФМ-сигнала, используемого в портативных ДМВ-передатчиках аварийных радиобуев АРБ-406 глобальной спутниковой системы поиска и спасения терпящих бедствие КОСПАС-САРСАТ. Модуляция фазы в модулированной части импульсных сигналов АРБ-406 производится так называемым взвешенным манчестерским кодом, при котором скачки фазы происходят не чаще, чем два раза за период модулирующего воздействия Тм (с восстановлением фазы), а девиация фазы при ФМ составляет ±1,1 рад ( ±63о). На диаграмме фиг.3,д показан ФМ-сигнал, соответствующий такому изменению фазы (фиг.3,г).
Учитывая вышеизложенное, для демодуляции ФМ-сигнала предложенным способом необходимо проводить измерения интервалов Тии таким образом, чтобы ни одно изменение ("скачок") фазы при ФМ не было потеряно, чтобы каждое изменение фазы попало в один из измеряемых интервалов полностью и чтобы в один измеряемый интервал не попало больше одного изменения фазы.
При определении периода Т ФМ-сигнала в измерительных интервалах Тии, меньших, чем минимальное время между соседними воздействиями на фазу сигнала (Тм на фиг.3,а), измеренные значения периода (и частоты) сигнала зафиксируют эти воздействия (если они произойдут в течение какого-либо измерительного интервала Тии). Если же воздействий на фазу в течение какого-то интервала Тииi не будет, то его величина будет кратна периоду немодулированного сигнала То:Тииi nTo. При длительности измерительных интервалов Тии, больших, чем время между соседними воздействия на фазу, в один измерительный интервал Тииk могут попасть два воздействия на фазу модулированного сигнала, которые могут скомпенсировать друг друга, и результирующая величина измеренного интервала Тииk также будет кратна периоду немодулированного сигнала: Тииk n˙To.
Таким образом, чтобы не потерять при демодуляции ФМ-сигналов информации о каждом изменении фазы при воздействии модулиpующего сигнала, коэффициент кратности измеряемых интервалов Тии периоду модулированного сигнала необходимо выбрать таким, чтобы величина любого измеряемого интервала Тии при модуляции сигнала была всегда меньше, чем минимальная величина интервала времени Тм между соседними воздействиями модулирующего телеграфного сигнала на фазу исследуемого модулируемого сигнала, в соответствии с условием (1).
Кроме того, измерения этих интервалов Тии при работе с реальными ФМ-сигналами, когда моменты воздействия на фазу модулирующих сигналов заранее неизвестны, необходимо производить таким образом, чтобы любое изменение фазы ФМ-сигнала полностью было зафиксировано в одном из измеряемых интервалов Тии (и только одно это изменение фазы в одном интервале Тии). Это условие выполняется только в том случае, если измерения интервалов Тии, кратных периоду Т модулированного сигнала, будут производить с перекрытием по времени, причем длительности перекрывающихся частей соседних измерительных интервалов ( τип) должны быть больше длительности переходных процессов при модуляции фазы сигнала ( τпп) и меньше половины минимального интервала между соседними воздействиями модулирующего сигнала (периода модуляции Тм).
Для обеспечения дешифрации сообщения, передаваемого модулированным сигналом, необходима фиксация всех моментов воздействия модулирующего телеграфного сигнала на фазу модулированного сигнала и значение величин результатов этих воздействий и их распределения во времени. Для выполнения последнего условия измерения интервалов Тии, кратных периоду модулированного сигнала Т, должны проводиться не только с перекрытием, но и в тактируемые моменты времени с известным периодом тактирования, величина которого должна быть заведомо меньше ожидаемого периода модуляции Тм. Результаты измерений интервалов Тии необходимо последовательно запомнить к соответствующим тактовым интервалам. Демодуляцию модулированного сигнала и дешифрацию переданного сообщения производят посредством обработки полученной последовательности запомненных значений измеренных интервалов с известным периодом тактирования, используя распределение во времени полученной последовательности измеренных значений Тии и связь этого распределения с характером угловой модуляции и кодирования передаваемого сообщения. Для демодуляции модулированного сигнала и дешифрации переданного сообщения по полученной последовательности измеренных значений Тии необходимо определить прежде всего период модуляции ("битовый интервал") Тм по известному периоду тактирования. Для определения величины Тм в начале информационного сообщения в модулированном сигнале обычно передают сигналы т. н. "битовой синхронизации". Например, в начале сообщения в модулированной части каждого импульса АРБ-406 упомянутой выше системы КОСПАС-САРСАТ передается синхросигнал в виде 15 единиц (при этом в каждом периоде Тмпроисходит по одному "скачку" фазы на +2,2 рад и на -2,2 рад). Далее необходимо провести сортировку измеренных значений Тии по их величинам, выделить экстремальные значения Тии и определить величины и знаки отклонений ΔТии экстремальных значений от "средних" (соответствующих немодулированному сигналу с периодом То). По этим отклонениям ΔТииможно восстановить (при априорно известном характере модуляции) исходную модулирующую функцию, отражающую изменение модулируемого параметра сигнала (фазы или частоты) от времени, т.е. осуществлять демодуляцию сигнала.
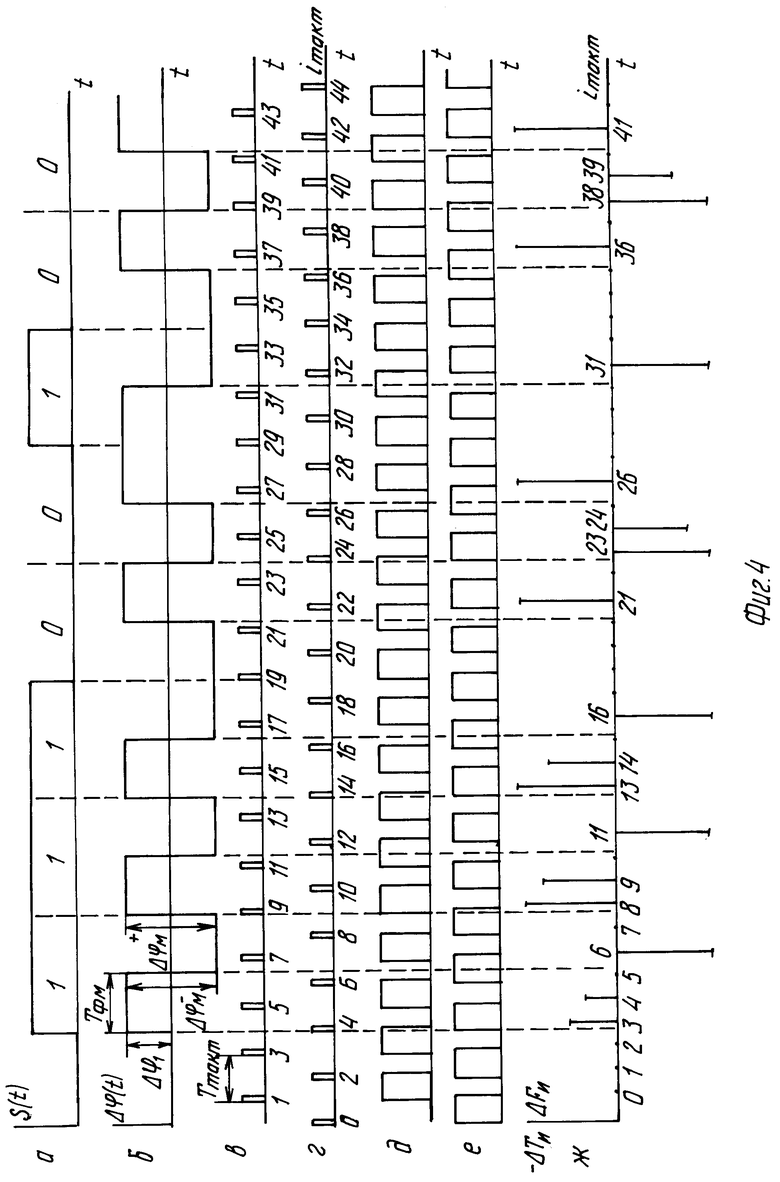
Пример реализации предложенного способа при демодуляции ФМ-сигнала передатчика АРБ-406 системы КОСПАС-САРСАТ, удовлетворяющий вышеперечис- ленным требованиям, иллюстрируется диаграммами на фиг.4. На диаграмме 4,а представлен информационный цифровой сигнал S(t) в потенциальном двоичном коде (в виде последовательности "единиц" и "нулей"), а на диаграмме 4,б показаны соответствующие изменения фазы Δϕ высокочастотного сигнала АРБ-406 при модуляции ее информационным цифровым сигналом. На диаграммах 4,в и 4,г представлены две последовательности соответственно "нечетных" и "четных" тактовых импульсов с равными частотами, сдвинутые одна относительно другой на половину периода Ттакт. Отличительной особенностью предложенного способа является проведение измерений перекрывающихся интервалов Тии, кратных периоду исследуемого модулированного сигнала, поочередно двумя измерителями, запускаемыми двумя вышеуказанными последовательностями тактовых импульсов. На диаграмме 4,д показана последовательность интервалов Тии (нечетных), измеряемых первым измерителем, запускаемым тактирующей последовательностью 4,в, а на диаграмме 4,е показана другая последовательность интервалов Тии ("четных"), измеряемых вторым измерителем, запускаемым другой тактирующей последовательностью 4,г, сдвинутой относительно последовательности 4, в, как указывалось выше, на Ттакт/2. В промежутках между окончанием каждого предыдущего измеряемого интервала Тии и началом каждого последующего измеряемого интервала в каждом измерителе производится передача измеренных значений каждого предыдущего интервала Тии в блок памяти (например, микроЭВМ) и приведение счетчиков импульсов каждого измерителя в исходное состояние (их "обнуление"). Величины этих промежутков из-за взаимного перекрытия "четных" и "нечетных" интервалов Тии будут меньше Ттакт/2, однако они должны быть больше некоторой минимальной величины, необходимой для передачи измеренных значений Тии в блок памяти в "обнуления" счетчиков (конкретное значение этой минимальной величины определяется быстродействием выбранной элементной базы для блока памяти и счетчиков измерителей). Необходимое перекрытие "нечетных" и "четных" измеряемых интервалов Тии обеспечивается надлежащим выбором коэффициента n кратности этих интервалов периоду Т модулированного сигнала.
В блок памяти заносят результаты измерений обоих измерителей в соответствующие ячейки ("нечетные" и "четные"), нумеруют эти результаты с привязкой к соответствующим тактовым интервалам и к адресам ячеек памяти. Таким образом формируют последовательность измеренных значений интервалов Тии, по которой затем производят (с помощью, например, той же ЭВМ) демодуляцию исходного модулированного сигнала и дешифрацию переданного сообщения, используя распределение во времени полученной последовательности измеренных значений Тии и связь этого распределения с характером угловой модуляции, и кодирование переданного сообщения. Для этого производят сортировку измеренных значений Тии по их величинам, выделяют экстремальные значения Тии и определяют величины и знаки отклонений ΔTии экстремальных значений от "средних" (соответствующих немодулированному сигналу с периодом То). По этим отклонениям ΔТии (или по соответствующим отклонениям частоты ΔFи (Fи1/Tии), последовательность которых показана на диаграмме 4,ж, восстанавливают исходную модулирующую функцию, отражающую изменение модулируемого параметра сигнала (в данном примере, фазы) от времени.
Упрощенная структурная схема устройства, реализующего предложенный способ, представлена на фиг. 5.
Устройство состоит из блока 1 преобразователя частоты исследуемого модулированного сигнала в низкочастотный диапазон, тактового генератора 2, управляющего работой двух идентичных измерителей 3 и 4 интервалов времени Тх, кратных периоду исследуемого модулированного сигнала, устройства связи 5 этих измерителей с микроЭВМ 6, к которой подключено регистрирующее устройство 7.
Работа устройства поясняется диаграммами, представленными на фиг.4. Сигналы от тактового генератора 2 (фиг.4,в и г) поочередно запускают измерители 3 и 4, которые поочередно измеряют интервалы времени Тх с таким (заранее выбранным) коэффициентом кратности n, который обеспечивает перекрытие этих интервалов (в обоих измерителях) на необходимое время (фиг.4,д и е), а также возможность передачи результатов измерений через устройство связи 5 в микроЭВМ 6 и приведения счетчиков импульсов в каждом измерителе в исходное состояние. При появлении сигнала после запуска очередным тактовым импульсом измерители 3 и 4 успевают закончить измерения до появления следующего тактового импульса. По окончании каждого измерения от измерителей 3 и 4 на устройство связи 5 подаются сигналы об окончании измерения и по этим сигналам измеренные значения Тии передаются в память микроЭВМ 6, в которой располагают запомненные значения в определенном порядке по мере поступления и затем их обрабатывают или выводят весь массив измеренных значений Тии на регистрирующее устройство 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения комплекса параметров выходных сигналов импульсных радиопередатчиков | 1990 |
|
SU1737369A1 |
| Устройство для определения комплекса параметров выходных сигналов импульсных радиопередатчиков | 1987 |
|
SU1479892A1 |
| Способ определения сдвига фазы в фазоманипулированном сигнале | 1987 |
|
SU1476402A1 |
| СПОСОБ ПЕРЕДАЧИ ДОПОЛНИТЕЛЬНОЙ ИНФОРМАЦИИ В СИСТЕМЕ УКВ-ВЕЩАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2030835C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| АБОНЕНТСКИЙ ПУНКТ В СИСТЕМЕ БЕСПРОВОДНОЙ ЦИФРОВОЙ ТЕЛЕФОННОЙ СВЯЗИ | 1990 |
|
RU2154360C2 |
| АБОНЕНТСКИЙ ПУНКТ В АБОНЕНТСКОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 1990 |
|
RU2138122C1 |
| ИЗМЕРИТЕЛЬ ФАЗ ОСЦИЛЛОГРАФИЧЕСКИЙ | 2005 |
|
RU2314543C2 |
| БЕСПРОВОДНАЯ СЕТЬ И ИСПОЛЬЗУЕМЫЕ В НЕЙ БАЗОВАЯ ПРИЕМОПЕРЕДАЮЩАЯ СТАНЦИЯ И БЕСПРОВОДНОЕ СЕТЕВОЕ УСТРОЙСТВО | 2009 |
|
RU2518204C2 |
| СПОСОБ РАДИОСВЯЗИ | 2007 |
|
RU2342785C1 |


Использование: передача данных по каналам связи. Сущность изобретения: способ включает в себя перенос спектра модулированного радиосигнала в область низких частот, проведение множества измерений периода преобразованного модулированного сигнала (через измерение интервалов времени, кратных периоду) в тактируемые моменты времени, измерение интервалов, кратных периоду, производят с перекрытием этих интервалов во времени, коэффициент кратности выбирают таким, чтобы перекрываемые части измеряемых интервалов были больше длительности переходных процессов при модуляции сигнала, а сами эти интервалы были меньше половины периода модуляции, значения измеренных интервалов последовательно запоминают с привязкой к соответствующим тактовым интервалам и далее осуществляют демодуляцию сигнала и дешифрацию переданного сообщения по распределению во времени запомненных значений измеренных интервалов и связи этого распределения с характером угловой модуляции. 5 ил.
СПОСОБ ПРИЕМА СИГНАЛОВ С УГЛОВОЙ МОДУЛЯЦИЕЙ, заключающийся в преобразовании принимаемого модулированного сигнала путем переноса его спектра в область низких частот, выделении информации путем многократного измерения периодов преобрзованного модулированного сигнала в тактируемые моменты времени, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения приема сигналов с частотной и фазовой модуляцией и повышения достоверности принимаемых сигналов, производят измерения интервалов времени преобразованного сигнала, кратных периоду модулированных сигнала с известным периодом тактирования, с перекрытием измеряемых интервалов времени, при этом коэффициент кратности выбирают из условия
(1/2)τм> τи.и> τи.п> τп.п,
где τп.п длительность переходных процессов при модуляции;
τм период модуляции;
τи.и длительность измеренных интервалов времени;
τи.п длительность перекрывающихся частей измеренных интервалов,
значения измеренных интервалов последовательно запоминают с привязкой к соответствующим тактовым интервалам и демодулируют сигнал и дешифрируют переданное сообщение по распределению во времени запомненных значений измеренных интервалов и связи этого распределения с характером угловой модуляции.
| Патент США N 4574247, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
