Изобретение относится к области радиотехники и может быть использовано для демодуляции кратковременных сигналов многоуровневой абсолютной фазовой модуляции. Под кратковременным понимают сигнал, длительность которого  меньше длительности входной реализации
меньше длительности входной реализации  , подвергнутой обработке с целью его обнаружения, распознавания и последующего измерения его технических параметров [1].
, подвергнутой обработке с целью его обнаружения, распознавания и последующего измерения его технических параметров [1].
Известен способ когерентной демодуляции сигналов многоуровневой абсолютной фазовой модуляцией (ФМ-М) [см. 2, п 6.2.5. – стр. 303], который состоит в умножении принимаемого сигнала на квадратурные опорные гармонические колебания, синхронные с несущим колебанием принимаемого сигнала, формируемые генератором, управляемого напряжением (ГУН), низкочастотной фильтрации произведений сигнала и опорных колебаний, тактовой синхронизации с принимаемым сигналом, которая заключается в определении границ элементарных посылок, вычислении оценок выходных напряжений фильтров нижних частот (ФНЧ) на длительности каждого тактового интервала и принятии решения о значении принятого символа на основе вычисления арктангенса отношения полученных оценок, причем синхронизация ГУН с несущей частотой принимаемого сигнала выполняется при помощи системы фазовой автоподстройки частоты (ФАПЧ), которая определяет величину рассогласования мгновенной частоты опорного гармонического колебания ГУН и несущего колебания принимаемого сигнала ФМ-М и преобразует его в управляющее напряжение, меняющее мгновенную частоту ГУН.
Недостатки данного способа обусловлены использованием системы ФАПЧ и заключаются в зависимости погрешности определения рассогласования мгновенной частоты опорного гармонического колебания ГУН и несущего
колебания принимаемого сигнала от количества элементарных посылок на длительности выборки сигнала, отношения сигнал/шум (ОСШ) и интенсивности замираний (общих и частотно-селективных) на радиолинии, которая может привести к невозможности правильной демодуляции [3]. Недоступность обнаружения начала и окончания сеанса связи, что приводит к появлению на выходе демодулятора в отсутствие сигнала случайной последовательности символов из-за влияния аддитивного шума.
Наиболее близким к предлагаемому изобретению является известный способ некогерентной демодуляции сигналов относительной ФМ (ОФМ) [см. 4, п.11.7. – стр. 300], который состоит в несинхронном фазовом детектировании, осуществляемом умножением принимаемого сигнала на квадратурные опорные гармонические колебания неуправляемого генератора, настроенного на частоту, близкую к несущей частоте принимаемого сигнала, интегрировании выходных напряжений смесителей синфазного и квадратурного каналов, дискретизации выходных напряжений интеграторов, выполняемой системой тактовой синхронизации и заключающейся в разделении интегрированных напряжений на тактовые интервалы, расчёте арктангенса выходных напряжений синфазного и квадратурного каналов, значение которого подается на первый вход сумматора и, через линию задержки на один тактовый интервал, на второй (вычитающий) вход сумматора для вычисления разности фаз текущего и предыдущего тактовых интервалов, принятии решения о значении текущего символа сигнала ОФМ при помощи устройства принятия решения. Данный способ выбран в качестве прототипа.
По сравнению с предыдущим способом в способе-прототипе исключаются ошибки, обусловленные влиянием системы ФАПЧ, что снимает ограничение на длительность сеанса связи [4, 5].
Недостатками способа-прототипа являются:
1. Область применения прототипа ограничена демодуляцией сигналов ОФМ и невозможностью его применения для демодуляции сигналов абсолютной ФМ-М, что следует из описания способа-прототипа.
2. Подверженность ошибкам, обусловленным замираниями на радиолинии.
3. Необходимость оценивания частоты сигнала для настройки неуправляемого генератора местной несущей на частоту, близкую к несущей частоте принимаемого сигнала, а в практической реализации, как указано в прототипе [см. 4, п.11.7. – стр. 300], применения автоподстройки частоты гетеродина, ограничивающей минимальную длительность сеанса связи либо фрагмента сигнала, передаваемого на одной частоте, либо выборки сигнала.
4. Недоступность обнаружения начала и окончания сеанса связи, что приводит к появлению на выходе демодулятора в отсутствие сигнала случайной последовательности символов из-за влияния аддитивного шума.
Достигаемым техническим результатом заявленного способа является уменьшение минимальной длительности сеанса связи, а также уменьшение вероятности ошибки  демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии.
демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии.
Для достижения указанного технического результата в способе демодуляции кратковременных сигналов абсолютной ФМ-М выполняется аналого-цифровое преобразование входного случайного процесса (ВСП), обнаружение сигнала в выборке ВСП для запуска или остановки демодулятора, определение границ элементарных посылок при помощи устройства тактовой синхронизации (УТС), выделение первой элементарной посылки из обрабатываемой выборки принимаемого сигнала и ее сдвиг по фазе на 90° с использованием преобразования Гильберта, запись первой элементарной посылки принимаемого сигнала и ее задержанной на 90° копии в запоминающие устройства (ЗУ) для последующего использования в качестве опорных колебаний, потактное, под управлением УТС, детектирование принимаемого сигнала квадратурным методом, интегрирование детектированных напряжений раздельно в синфазном и квадратурном каналах, решение системы уравнений для определения значения принятого информационного символа в устройстве принятия решения.
Общими признаками прототипа и предлагаемого способа являются использование квадратурного детектора, интеграторов на выходах каналов квадратурного детектора, устройства тактовой синхронизации демодулятора с принимаемым сигналом, а также устройства принятия решения относительно изменения фазы.
Отличительными признаками предлагаемого способа от прототипа являются:
1. Введен обнаружитель сигнала, позволяющий определять начало и окончание работы демодулятора.
2. Устройство тактовой синхронизации применяется для разделения на тактовые интервалы радиосигнала, а не детектированных напряжений синфазного и квадратурного каналов как в прототипе, что позволяет детектировать сигнал по тактам относительно первой элементарной посылки.
3. Вместо генератора местной несущей используются ЗУ синфазного и квадратурного каналов, в которых хранится первая элементарная посылка сигнала и ее копия, сдвинутая по фазе на 90°, используемые в качестве опорного колебания.
4. Значение символа сообщения, переносимого каждой элементарной посылкой, определяется относительно первой посылки радиосигнала.
Благодаря новой совокупности существенных признаков технический результат – уменьшение минимальной длительности сеанса связи, а также уменьшение вероятности ошибки  демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии, достигается за счет использования в качестве опорного колебания на длительности всего принимаемого сигнала первой элементарной посылки с известной (заранее определенной на данной линии связи) начальной фазой. Частотно-селективные замирания наблюдаются при многолучевом распространении радиоволн, когда разность хода лучей превышает длительность элементарной посылки [3]. Условимся называть луч с кратчайшей траекторией распространения первым лучом. Тогда первая посылка первого луча не подвергается искажающему воздействию сигналов других лучей. Поэтому детектированное напряжение содержит сумму произведений
демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии, достигается за счет использования в качестве опорного колебания на длительности всего принимаемого сигнала первой элементарной посылки с известной (заранее определенной на данной линии связи) начальной фазой. Частотно-селективные замирания наблюдаются при многолучевом распространении радиоволн, когда разность хода лучей превышает длительность элементарной посылки [3]. Условимся называть луч с кратчайшей траекторией распространения первым лучом. Тогда первая посылка первого луча не подвергается искажающему воздействию сигналов других лучей. Поэтому детектированное напряжение содержит сумму произведений
первой (неискаженной) посылки на i-ю элементарную посылку первого луча, напряжения сигналов остальных лучей на i-м тактовом интервале, а также шумовые и комбинационные компоненты.
Амплитуда сигнала, приходящего в пункт приема по кратчайшей траектории существенно превышает амплитуду сигналов других лучей [3] и сумма энергии произведений первой (неискаженной) посылки на напряжения сигналов остальных лучей на i-м тактовом интервале будет меньше энергии произведения первой (неискаженной) посылки на i-ю элементарную посылку первого луча. Поэтому вероятность ошибочного решения при демодуляции по сравнению с однолучевым приемом сигнала снижается пропорционально отношению энергии лучей. Кроме того, система ФАПЧ, используемая при когерентной и квазикогерентной (как в способе-прототипе) демодуляции для восстановления местной несущей, в условиях замираний формирует управляющий сигнал, искаженный мультипликативной помехой. Влияние такой помехи приводит к ложному захвату или срыву синхронизации генератора местной несущей [5] и, как следствие, появлению длинных серий ошибок, т.е. резкому увеличению вероятности ошибки демодуляции.
Другим фактором, снижающим  , является использование обнаружения начала и окончания сеанса связи для предотвращения появления случайной последовательности символов на выходе демодулятора в отсутствие сигнала и пропуска кратковременных сигналов за счет введения в схему демодулятора обнаружителя, применяемого для автоматического исключения из обработки выборок ВСП, не содержащих сигнал.
, является использование обнаружения начала и окончания сеанса связи для предотвращения появления случайной последовательности символов на выходе демодулятора в отсутствие сигнала и пропуска кратковременных сигналов за счет введения в схему демодулятора обнаружителя, применяемого для автоматического исключения из обработки выборок ВСП, не содержащих сигнал.
Проведенный анализ уровня существующей техники позволил установить, что аналоги, характеризующиеся совокупностью признаков тождественных всем признакам заявленного технического решения, отсутствуют. Это указывает на соответствие заявленного способа условию патентоспособности «новизна». Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность
влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Способ поясняется иллюстрациями, на которых представлены:
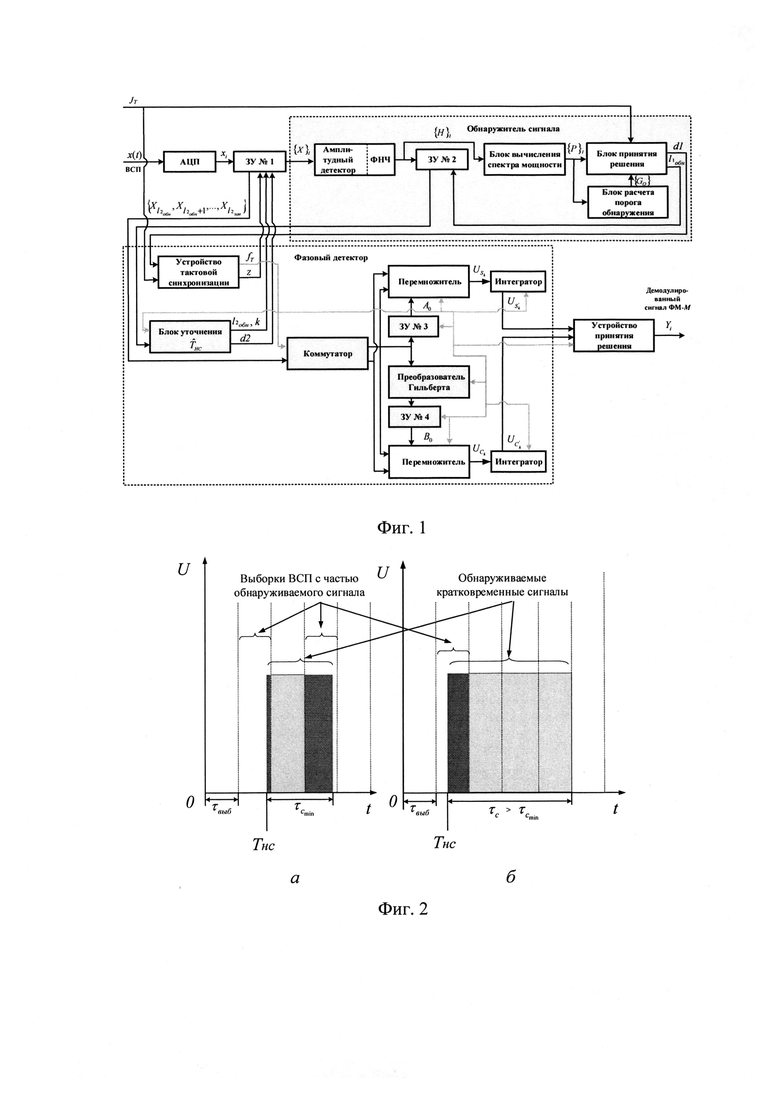
фиг. 1 – структурная схема демодулятора кратковременных сигналов ФМ-М;
фиг. 2 – диаграмма, поясняющая критерии выбора длины выборки ВСП: а – кратковременный сигнал ФМ-М с минимальной длительностью  ; б – кратковременный сигнал ФМ-М с длительностью
; б – кратковременный сигнал ФМ-М с длительностью  >
> ;
;
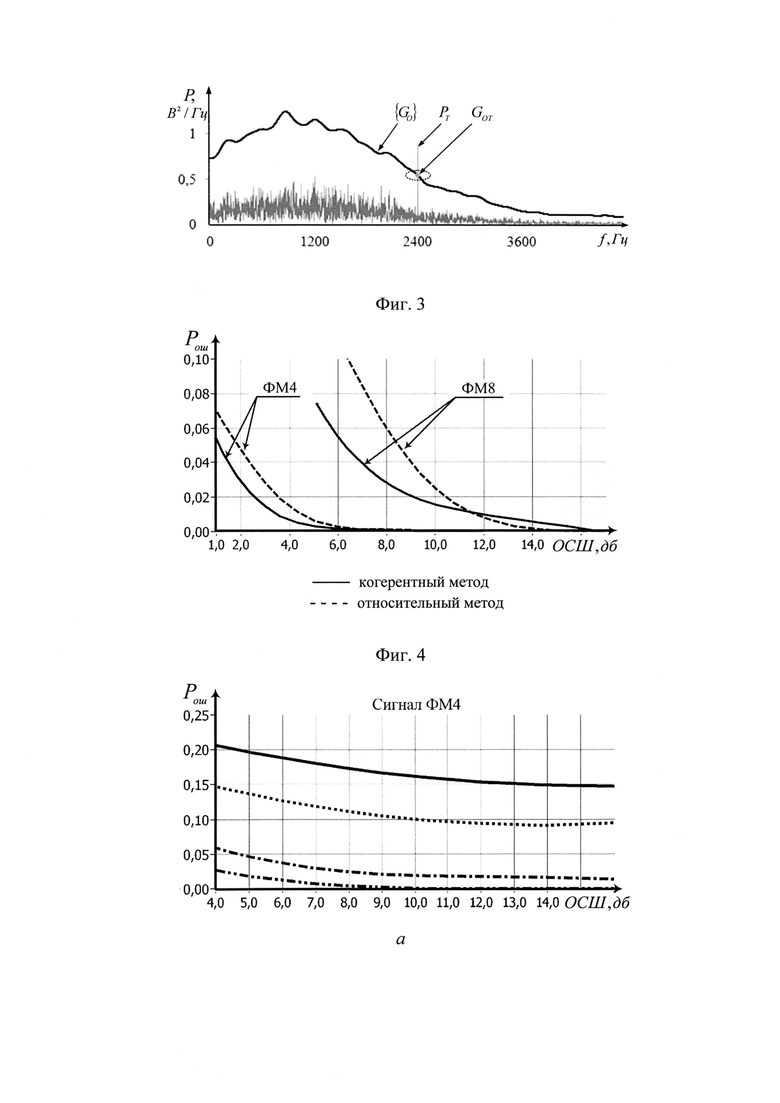
фиг. 3 – адаптивный пороговый уровень обнаружения составляющей тактовой частоты fт в спектре мощности огибающей сигнала ФМ4-2400 при ОСШ 5 дБ;
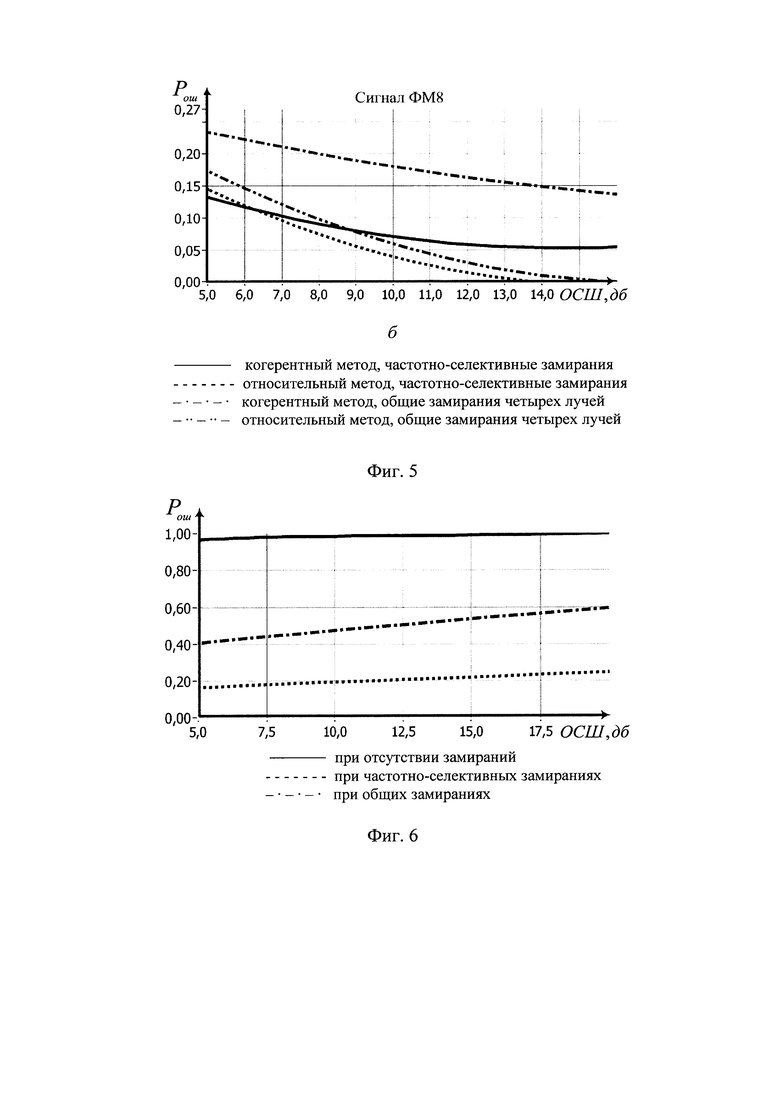
фиг. 4 – график зависимости вероятности ошибки  демодуляции сигналов ФМ4 и ФМ8 от ОСШ при отсутствии замираний;
демодуляции сигналов ФМ4 и ФМ8 от ОСШ при отсутствии замираний;
фиг. 5 – график зависимости вероятности ошибки  демодуляции сигналов ФМ-М от ОСШ при замираниях: а – сигнал ФМ4; б – сигнал ФМ8;
демодуляции сигналов ФМ-М от ОСШ при замираниях: а – сигнал ФМ4; б – сигнал ФМ8;
фиг. 6 – график зависимости вероятности захвата частоты ФАПЧ от ОСШ при наличии и отсутствии замираний для сигнала ФМ8.
Способ демодуляции кратковременных сигналов многоуровневой абсолютной фазовой модуляции в условиях замираний осуществляется следующим образом (фиг. 1):
Во все ячейки памяти всех ЗУ, входящих в состав демодулятора, принудительно записывается «0».
Этап 1. Аналого-цифровое преобразование ВСП, представляющего сумму сигнала и шума:
х(t)= α ·S(t)+n(t), (1)
где S(t) – сигнал на постоянной промежуточной частоте радиоприемника; n(t) – шум; α – неизвестный параметр, принимающий значения 0 или 1, α=0 (x(t) не содержит сигнал S(t)); α=1 (в x(t) содержится сигнал S(t)).
Это преобразование реализуется на основе способа дискретизации [см. 6, п.1.3.3. – стр. 36] при помощи аналого-цифрового преобразователя (АЦП). В результате этого непрерывный ВСП х(t) преобразуется в последовательность дискретных отсчетов  , i ∈{0, 1, 2, …, ∞} – порядковый номер отсчета ВСП, которые непрерывным потоком поступают в буферное ЗУ № 1, а считываются – выборками
, i ∈{0, 1, 2, …, ∞} – порядковый номер отсчета ВСП, которые непрерывным потоком поступают в буферное ЗУ № 1, а считываются – выборками  длиной К отсчетов, где l ∈ {0, 1, 2, …, ∞} – номер выборки.
длиной К отсчетов, где l ∈ {0, 1, 2, …, ∞} – номер выборки.
Объем ЗУ № 1 должен обеспечить хранение не менее 6 выборок длиной К отсчетов каждая. Поступающие с АЦП отсчеты, после заполнения ЗУ № 1, записываются в те ячейки памяти, в которых хранились отсчеты первой выборки (принцип FIFO – первый пришел, первый ушел). Длина выборки К определена исходя из заданной вероятности правильного обнаружения кратковременного сигнала не менее 0,95 и ложной тревоги не более 10-3 при ОСШ не ниже 5 дБ [7, 8] и минимальной длительности сеанса связи (сигнала) 50 мс для диапазона высоких частот по формуле 2:
 , (2)
, (2)
где  – минимальная длительность кратковременного сигнала,
– минимальная длительность кратковременного сигнала,  – частота дискретизации АЦП, задаваемая в соответствии с теоремой Котельникова [9].
– частота дискретизации АЦП, задаваемая в соответствии с теоремой Котельникова [9].
Таким образом, длительность выборки  объемом К отсчетов не превышает половины минимальной длительности сеанса связи (сигнала). Это гарантирует получение, по меньшей мере, одной выборки
объемом К отсчетов не превышает половины минимальной длительности сеанса связи (сигнала). Это гарантирует получение, по меньшей мере, одной выборки  , полностью состоящей из отсчетов принимаемого сигнала минимальной длительности (фиг. 2, а). В такой выборке ОСШ превышает ОСШ в выборке, содержащей начало (окончание) принимаемого сигнала (фиг. 2, а, б), что позволяет достичь максимальной вероятности правильного обнаружения и минимизировать вероятность ложной тревоги.
, полностью состоящей из отсчетов принимаемого сигнала минимальной длительности (фиг. 2, а). В такой выборке ОСШ превышает ОСШ в выборке, содержащей начало (окончание) принимаемого сигнала (фиг. 2, а, б), что позволяет достичь максимальной вероятности правильного обнаружения и минимизировать вероятность ложной тревоги.
Обнаружение выполняется сравнением энергии выборки входного процесса с порогом. Если энергия выборки  не превышает порога, то принимается
не превышает порога, то принимается
решение об отсутствии сигнала. Если энергия выборки превышает порог, то принимается решение о наличии сигнала.
При этом принятые решения могут быть ошибочными в случаях [3]:
1. Сигнала нет (α=0), но он обнаружен – ложная тревога или ошибка I рода.
2. Сигнал есть (α=1), но он не обнаружен – пропуск сигнала или ошибка II рода.
Этап 2. Энергетическое обнаружение сигнала. Выполняется для автоматического запуска или остановки демодулятора, а также исключения из обработки выборок ВСП, не содержащих сигнал. Результатами обнаружения являются: управляющий сигнал d1 и номер выборки ВСП –  , в которой принято решение о наличии сигнала. Управляющий сигнал предназначен для запуска (остановки) УТС.
, в которой принято решение о наличии сигнала. Управляющий сигнал предназначен для запуска (остановки) УТС.  определяет адрес области памяти ЗУ № 2, с которой начнется считывание данных на третьем этапе. Обнаружение сигнала осуществляется с использованием двух критериев порогового и мажоритарного в блоке принятия решения.
определяет адрес области памяти ЗУ № 2, с которой начнется считывание данных на третьем этапе. Обнаружение сигнала осуществляется с использованием двух критериев порогового и мажоритарного в блоке принятия решения.
Пороговое обнаружение выполняется на основе анализа спектра огибающей выборки ВСП [8] путем обнаружения спектрального пика в спектре мощности выборки ВСП и сравнение его с номинальным значением тактовой частоты, используемой на линии связи, что позволяет повысить вероятность правильного обнаружения. Применение мажоритарной обработки результатов работы порогового обнаружителя позволяет минимизировать вероятность ложной тревоги.
Огибающую l-й выборки сигнала ФМ-М  рассчитывают методом его амплитудного детектирования [см. 9, гл.8 – стр. 512] с последующей НЧ фильтрацией. Ширина полосы пропускания ФНЧ выбирается равной скорости модуляции, что позволяет минимизировать влияние аддитивного шума на величину искажений огибающей. При цифровой обработке амплитудное детектирование выполняется исключением из обработки знакового разряда двоичных комбинаций отсчетов. С выхода ФНЧ амплитудного детектора отсчеты
рассчитывают методом его амплитудного детектирования [см. 9, гл.8 – стр. 512] с последующей НЧ фильтрацией. Ширина полосы пропускания ФНЧ выбирается равной скорости модуляции, что позволяет минимизировать влияние аддитивного шума на величину искажений огибающей. При цифровой обработке амплитудное детектирование выполняется исключением из обработки знакового разряда двоичных комбинаций отсчетов. С выхода ФНЧ амплитудного детектора отсчеты
 записываются в ЗУ №2 и поступают на вход блока вычисления спектра мощности.
записываются в ЗУ №2 и поступают на вход блока вычисления спектра мощности.
ЗУ № 2 предназначено для хранения не менее четырех выборок огибающей  , которые в дальнейшем могут быть использованы в блоке уточнения времени начала сигнала.
, которые в дальнейшем могут быть использованы в блоке уточнения времени начала сигнала.
Вычисление спектра мощности выборки  осуществляется методом дискретного преобразования Фурье [9] в соответствии с выражением 3:
осуществляется методом дискретного преобразования Фурье [9] в соответствии с выражением 3:
 , (3)
, (3)
где  – v-й комплексный спектральный коэффициент, v∈{0, 1, 2, …, K–1},
– v-й комплексный спектральный коэффициент, v∈{0, 1, 2, …, K–1},  – k-й отсчет детектированного напряжения выборки с номером l, k – порядковый номер отсчета, k∈{0, 1, 2, …, K – 1}, К – количество отсчетов в выборке, j – мнимая единица. Коэффициенты спектра мощности рассчитываются как [9]:
– k-й отсчет детектированного напряжения выборки с номером l, k – порядковый номер отсчета, k∈{0, 1, 2, …, K – 1}, К – количество отсчетов в выборке, j – мнимая единица. Коэффициенты спектра мощности рассчитываются как [9]:
 . (4)
. (4)
Каждая точка адаптивного порога обнаружения  рассчитывается в блоке расчета порога обнаружения для каждой составляющей спектра огибающей как сумма сглаженной оценки спектра мощности в скользящем временном окне и функции от их среднеквадратического отклонения [см. 7, эт. 4 – стр. 9]. Решение о наличии или отсутствии сигнала в текущей выборке принимают сравнением коэффициента спектра мощности, соответствующего номинальному значению тактовой частоты
рассчитывается в блоке расчета порога обнаружения для каждой составляющей спектра огибающей как сумма сглаженной оценки спектра мощности в скользящем временном окне и функции от их среднеквадратического отклонения [см. 7, эт. 4 – стр. 9]. Решение о наличии или отсутствии сигнала в текущей выборке принимают сравнением коэффициента спектра мощности, соответствующего номинальному значению тактовой частоты  , используемой на линии связи, с соответствующей ему точкой адаптивного порога
, используемой на линии связи, с соответствующей ему точкой адаптивного порога  (фиг.3) в блоке принятия решения [см. 7, эт. 5 – стр. 11].
(фиг.3) в блоке принятия решения [см. 7, эт. 5 – стр. 11].
Номер спектрального коэффициента, соответствующего номиналу тактовой частоты, рассчитывают в блоке принятия решения по правилу:  , где
, где  – разрешающая способность преобразования Фурье;
– разрешающая способность преобразования Фурье;  – длительность выборки.
– длительность выборки.
Результат сравнения принимает значение логической единицы, если в текущей выборке  и логического нуля в противном случае. При ОСШ 5 дБ и более вероятность ложной тревоги не превышает 10-3, а вероятность правильного решения превышает 0,95 [7]. При ОСШ менее 5 дБ вероятность ошибки обнаружения резко возрастает. Для снижения вероятности ложной тревоги результаты порогового обнаружения подвергаются мажоритарной обработке.
и логического нуля в противном случае. При ОСШ 5 дБ и более вероятность ложной тревоги не превышает 10-3, а вероятность правильного решения превышает 0,95 [7]. При ОСШ менее 5 дБ вероятность ошибки обнаружения резко возрастает. Для снижения вероятности ложной тревоги результаты порогового обнаружения подвергаются мажоритарной обработке.
Решение об обнаружении принимается по трем последовательно взятым выборкам с использованием мажоритарного правила два из трех в блоке принятия решения обнаружителя сигнала. Количество выборок, по которым выполняется обнаружение, определено исходя из заданной выше длины выборки, равной половине  (фиг. 2, а). По окончанию сравнения результатов порогового обнаружения, полученным в трех последовательно взятых выборках, по правилу: если
(фиг. 2, а). По окончанию сравнения результатов порогового обнаружения, полученным в трех последовательно взятых выборках, по правилу: если  превысило
превысило  в двух или более выборках, принимается решение о наличии сигнала в ВСП. При невыполнении этого правила на первом (управляющем) выходе блока принятия решения формируется сигнал d1 низкого уровня, запрещающий работу УТС. Если по описанному правилу принято решение о наличии сигнала в ВСП, то на управляющем выходе блока принятия решения формируется сигнал d1 высокого уровня, запускающий УТС, а со второго выхода подается
в двух или более выборках, принимается решение о наличии сигнала в ВСП. При невыполнении этого правила на первом (управляющем) выходе блока принятия решения формируется сигнал d1 низкого уровня, запрещающий работу УТС. Если по описанному правилу принято решение о наличии сигнала в ВСП, то на управляющем выходе блока принятия решения формируется сигнал d1 высокого уровня, запускающий УТС, а со второго выхода подается  в ЗУ № 2.
в ЗУ № 2.
Использование двухкритериального обнаружения позволяет достичь вероятности правильного обнаружения не менее 0,95 и ложной тревоги не более 10-3 при ОСШ не ниже 5 дБ, однако не позволяет точно определить время начала сигнала. Для предотвращения потери части сообщения задача точного определения времени начала сигнала  решается на этапе 3.
решается на этапе 3.
Этап 3. Уточнение времени начала сигнала. Выполняется в блоке уточнения  . Погрешность оценивания времени начала сигнала по результатам спектральной обработки может достигать 1/2 длительности выборки (фиг. 2), что приводит к потере части элементарных посылок. Известно [3, 5], что ошибка определения границ элементарных посылок не должна превышать
. Погрешность оценивания времени начала сигнала по результатам спектральной обработки может достигать 1/2 длительности выборки (фиг. 2), что приводит к потере части элементарных посылок. Известно [3, 5], что ошибка определения границ элементарных посылок не должна превышать
10% от длительности тактового интервала. Таким образом, для достижения требуемой помехоустойчивости демодуляции время начала сигнала необходимо определять с погрешностью не более 10% от длительности элементарной посылки.
Для достижения указанной точности определения  предложено использовать адаптивный алгоритм временной автоподстройки [10] с использованием укрупненной выборки огибающей сигнала. Укрупненная выборка содержит 2К отсчетов и формируется из К отсчетов предыдущей (с номером
предложено использовать адаптивный алгоритм временной автоподстройки [10] с использованием укрупненной выборки огибающей сигнала. Укрупненная выборка содержит 2К отсчетов и формируется из К отсчетов предыдущей (с номером  ) выборки огибающей, хранящихся в ЗУ № 2 и К отсчетов текущей (
) выборки огибающей, хранящихся в ЗУ № 2 и К отсчетов текущей ( ) выборки. В результате временной автоподстройки определяется номер отсчета k начала сигнала в выборке
) выборки. В результате временной автоподстройки определяется номер отсчета k начала сигнала в выборке  и
и  – номер выборки, содержащей начало сигнала. После определения
– номер выборки, содержащей начало сигнала. После определения  блоком уточнения начала сигнала формируется управляющий сигнал d2 высокого уровня, разрешающий считывание выборок ВСП из ЗУ № 1.
блоком уточнения начала сигнала формируется управляющий сигнал d2 высокого уровня, разрешающий считывание выборок ВСП из ЗУ № 1.  и k используются для определения адреса ячейки памяти ЗУ № 1, с которой выборки ВСП содержащие сигнал
и k используются для определения адреса ячейки памяти ЗУ № 1, с которой выборки ВСП содержащие сигнал , где
, где  – номер выборки, в которой обнаружено окончание сигнала, будут поступать в фазовый детектор. При начале работы демодулятора и после считывания выборки ВСП с номером
– номер выборки, в которой обнаружено окончание сигнала, будут поступать в фазовый детектор. При начале работы демодулятора и после считывания выборки ВСП с номером  блоком уточнения
блоком уточнения  формируется управляющий сигнал d2 низкого уровня, запрещающее считывание выборок ВСП
формируется управляющий сигнал d2 низкого уровня, запрещающее считывание выборок ВСП  из ЗУ № 1 в блок считывания посылок.
из ЗУ № 1 в блок считывания посылок.
Этап 4. Тактовая синхронизация. Заключается в разделении ВСП на тактовые интервалы, обрабатываемые раздельно, а также в формировании тактовых синхроимпульсов, управляющих работой блоков фазового детектора. Границы тактовых интервалов определяются после измерения  по формуле
по формуле  , где m ∈ {0, 1, 2, …} – номер тактового интервала. Погрешность
, где m ∈ {0, 1, 2, …} – номер тактового интервала. Погрешность
тактовой синхронизации определяется величиной ошибки определения времени начала сигнала.
Этап 5. Формирование опорного колебания. Реализуется с использованием УТС, ЗУ № 3, 4, коммутатора и блока преобразования Гильберта. В известных реализациях метода относительного детектирования в качестве опорного напряжения используется предыдущий тактовый интервал принимаемого сигнала [4], преобразованный в комплексную форму. При приеме сигналов абсолютной ФМ-М применение такого подхода приведет к кодированию детектированного сигнала М-ичным относительным кодом и, как следствие, невозможности восстановления принимаемого сообщения. Поэтому для достижения требуемого результата: возможности демодуляции сигнала ФМ-М без использования генератора местной несущей с системой ФАПЧ, ограничивающей минимальную длительность принимаемого сигнала, и предотвращения невосстанавливаемого искажения сообщения предложено выполнять детектирование относительно первого тактового интервала. Это меняет значения всех элементарных посылок принимаемого сигнала на одну и ту же величину, кратную фазовому углу, что позволяет восстановить принятое сообщение.
Длительность элементарной посылки в количестве отсчетов  поступает из УТС в ЗУ № 1. С приходом сигнала d2 высокого уровня в ЗУ № 1 отсчеты выборок
поступает из УТС в ЗУ № 1. С приходом сигнала d2 высокого уровня в ЗУ № 1 отсчеты выборок  поступают на информационный вход коммутатора блоками по z отсчетов. Первая элементарная посылка радиосигнала длиной z отсчетов поступает на входы ЗУ № 3 синфазного канала, блока преобразования Гильберта и перемножителей синфазного и квадратурного каналов с первого выхода коммутатора. Вторая и последующие посылки поступают только на входы перемножителей синфазного и квадратурного каналов со второго выхода коммутатора. В блоке преобразования Гильберта [см. 9, гл.4 – стр. 276] фаза первой элементарной посылки радиосигнала длиной
поступают на информационный вход коммутатора блоками по z отсчетов. Первая элементарная посылка радиосигнала длиной z отсчетов поступает на входы ЗУ № 3 синфазного канала, блока преобразования Гильберта и перемножителей синфазного и квадратурного каналов с первого выхода коммутатора. Вторая и последующие посылки поступают только на входы перемножителей синфазного и квадратурного каналов со второго выхода коммутатора. В блоке преобразования Гильберта [см. 9, гл.4 – стр. 276] фаза первой элементарной посылки радиосигнала длиной
z отсчетов сдвигается на 90°, после чего она записывается в ЗУ № 4 квадратурного канала фазового детектора.
Записанные в ЗУ № 3, 4 первая элементарная посылка принимаемого сигнала и ее задержанная на 90° копия до окончания сеанса связи (сигнала) используются в качестве опорных колебаний для детектирования принимаемого сигнала квадратурным методом.
Этап 6. Относительное детектирование принимаемого сигнала. Со второго выхода коммутатора элементарные посылки радиосигнала длиной z отсчетов поступают на первые (сигнальные) входы умножителей. На вторые входы (опорные) с выходов ЗУ № 3 и № 4 в синфазном и квадратурном каналах подаются z отсчетов соответственно первой элементарной посылки и ее Гильбертовской копии.
На выходах первого и второго перемножителей формируются напряжения, описываемые выражениями:

 , (5)
, (5)
где  и
и  – модуляционные символы первой элементарной посылки синфазного и квадратурного каналов,
– модуляционные символы первой элементарной посылки синфазного и квадратурного каналов,  и
и  – модуляционные символы синфазного и квадратурного каналов на k-м тактовом интервале; k = 0, 1, …, K;
– модуляционные символы синфазного и квадратурного каналов на k-м тактовом интервале; k = 0, 1, …, K;  и
и  напряжения синфазного и квадратурного каналов.
напряжения синфазного и квадратурного каналов.
Выходные напряжения каналов детекторов после интеграторов содержат комбинации канальных символов:
 ;
;
 . (6)
. (6)
Этап 7. Решение системы уравнений (6). Для разрешения системы уравнений (6) делается допущение о значении символов  = 1 и
= 1 и  = –1. С учетом принятого допущения система уравнений (6) может быть записана в виде:
= –1. С учетом принятого допущения система уравнений (6) может быть записана в виде:
 ;
;
 , (7)
, (7)
позволяющим получить оценки канальных символов синфазного и квадратурного каналов  и
и  :
:
 ;
;
 . (8)
. (8)
Оценки  и
и  в дальнейшем используются в качестве исходных данных для принятия решения о символе.
в дальнейшем используются в качестве исходных данных для принятия решения о символе.
Принятое допущение о значении  и
и  в большинстве случаев не соответствует их истинным значениям и приводит к повороту сигнального созвездия на величину, кратную фазовому углу принимаемого сигнала
в большинстве случаев не соответствует их истинным значениям и приводит к повороту сигнального созвездия на величину, кратную фазовому углу принимаемого сигнала  , где μ = 0, 1,…, М – 1, где М – объем сигнального ансамбля. Такое искажение может быть компенсировано на основе заранее известной на данной линии связи начальной фазой принимаемого сигнала либо применением методов анализа манипуляционного кода.
, где μ = 0, 1,…, М – 1, где М – объем сигнального ансамбля. Такое искажение может быть компенсировано на основе заранее известной на данной линии связи начальной фазой принимаемого сигнала либо применением методов анализа манипуляционного кода.
Вывод выражений, описывающих относительное детектирование для двухлучевого сигнала, выполнен на основе выражения (5) при допущении о том, что первая посылка первого луча не искажена интерференцией:
 ;
;
 , (9)
, (9)
где Q – целое количество тактовых интервалов, на которые задержан второй луч относительно первого,  и
и  – амплитуды соответственно первого и второго лучей сигнала ФМ,
– амплитуды соответственно первого и второго лучей сигнала ФМ,  – начальная фаза,
– начальная фаза,  – медленно изменяющаяся с течением времени разность фаз сигналов первого и второго лучей.
– медленно изменяющаяся с течением времени разность фаз сигналов первого и второго лучей.
В принятых допущениях ( = 1 и
= 1 и  = –1) оценки канальных символов синфазного и квадратурного каналов
= –1) оценки канальных символов синфазного и квадратурного каналов  и
и  получаются подстановкой (9) в
получаются подстановкой (9) в
(8):
 ;
;
 . (10)
. (10)
В то же время, когерентный демодулятор в аналогичных условиях формирует:
 ;
;
 . (11)
. (11)
Сравнение выражений (10) и (11) позволяет заключить, что при относительном детектировании мешающее воздействие второго луча в  раз меньше, чем при когерентном. Поэтому при замираниях помехоустойчивость относительного демодулятора выше, чем когерентного даже при точном захвате несущей системой ФАПЧ.
раз меньше, чем при когерентном. Поэтому при замираниях помехоустойчивость относительного демодулятора выше, чем когерентного даже при точном захвате несущей системой ФАПЧ.
Исследование возможности предложенного способа проведено на персональной ЭВМ посредством имитационного моделирования.
Для реализации этапов 1…7 разработано программное обеспечение в среде моделирования LabVIEW.
Возможность достижения заявленного технического результата подтверждена экспериментально. В ходе эксперимента проведено имитационное моделирование сигналов ФМ4 и ФМ8 длительностью 0,1 с со скоростью модуляции 1200 Бод. Модуляционные символы перед подачей на модулятор фильтровались ФНЧ с АЧХ типа «приподнятый косинус». Модель сигнала на выходе канала с замираниями формировалась сложением исходного модулированного сигнала с его ослабленными и задержанными копиями. Задержка имитировалась введением в последовательность отсчетов сигнала серии нулевых отсчетов. Демодуляция выполнялась без использования обратной связи по корректирующему коду. Экспериментальные данные обработаны методом регрессионного анализа с использованием полиномиальной модели второго порядка.
При отсутствии замираний относительный демодулятор проигрывает когерентному (фиг.4), причем с ростом объема сигнального ансамбля преимущество когерентного увеличивается, что полностью согласуется с теорией [5].
В условиях замираний, как общих, так и частотно-селективных (фиг.5, а, б), полученные данные не противоречат выводу о более высокой помехоустойчивости относительного демодулятора. Они также согласуются с известными данными о том, что увеличение объема сигнального ансамбля снижает помехоустойчивость некогерентного демодулятора в большей мере, чем когерентного. Частотно-селективные замирания моделировались задержкой второго луча на 2,25 тактовых интервала. Отношение амплитуды лучей: ФМ4 – 1/1,5; ФМ8 – 1/2. Общие замирания моделировались задержкой второго, третьего и четвертого лучей на 1/8, 5/15 и 1/2 тактового интервала. Отношение амплитуд лучей для ФМ4 – 1/1,8; 1/1,5 и 1/5. Амплитуды лучей для ФМ8 – 0,32; 0,26 и 0,34 от амплитуды первого луча.
В ходе экспериментов также проведена оценка зависимости вероятности захвата частоты системой ФАПЧ. Полученные результаты для сигнала ФМ8 представлены на фиг. 6. Анализ данных, представленных на графиках фиг. 6 позволяет заключить, что в отсутствие замираний система ФАПЧ работает устойчиво, вероятность захвата частоты стремится к 1, снижаясь до 0,96 при ОСШ 5 дБ. В таких условиях, даже при точной настройке генератора местной несущей, вероятность ошибки демодуляции превышает допустимое значение (фиг.6). Поэтому при отсутствии замираний ФАПЧ не оказывает влияния на вероятность ошибки демодуляции. Напротив, при замираниях, особенно частотно-селективных, вероятность захвата частоты существенно падает и не превышает 0,6 при ОСШ 20 дБ. В этих условиях ложный захват частоты системой ФАПЧ является основной причиной ошибок демодулятора.
Повышение помехоустойчивости метода относительной демодуляции обусловлено с одной стороны, меньшим в  раз вкладом мешающих лучей в детектированный сигнал абсолютной ФМ-М и, с другой стороны, отсутствием ошибок, обусловленных ложным захватом частоты системой ФАПЧ.
раз вкладом мешающих лучей в детектированный сигнал абсолютной ФМ-М и, с другой стороны, отсутствием ошибок, обусловленных ложным захватом частоты системой ФАПЧ.
Таким образом, проведенные экспериментальные исследования подтвердили заявленный технический результат – уменьшение минимальной длительности сеанса связи, а также уменьшение вероятности ошибки  демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии.
демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии.
Литература
1. Дворников С.В. Теоретические основы синтеза билинейных распределений. – СПб.: Изд-во Политехн. ун-та, 2007. – 268 с.
2. Прокис Джон Цифровая связь. Пер. с англ. / Под ред. Д.Д. Кловского. – М.: Радио и связь, 2000. – 800 с.
3. Финк Л.М. Теория передачи дискретных сообщений. – М.: Советское радио, 1970. – 728 с.
4. Спилкер Джон Цифровая спутниковая связь. Пер. с англ. / Под ред. В.В. Маркова. – М.: Связь, 1979. – 592 с.
5. Окунев Ю.Б. Цифровая передача информации фазомодулированными сигналами. – М.: Радио и связь, 1991. – 296 с.
6. Волков Л.Н. Системы цифровой радиосвязи: базовые методы и характеристики: Учеб. пособие. / Л. Н. Волков, М. С. Немировский, Ю. С. Шинаков. – М.: Эко-Трендз, 2005. – 392 с.
7. Патент РФ № 2010124535/28, 15.06.2010. Способ обнаружения множества узкополосных радиосигналов в широкой полосе частот // Патент России № 2429494. 2011. Бюл. № 26. / Нохрин О.А., Калмычков И.Е., Печурин В.В.
8. Печурин В.В. Алгоритм оценивания синхропараметров и различения радиосигналов с ЧМ-М, ФМ-М/КАМ. // Общие вопросы радиоэлектроники. 2010. Выпуск 1. С.94–103
9. Сергиенко А. Б. Цифровая обработка сигналов: Учеб. пособие. / А. Б. Сергиенко – 3-е изд. – СПб.: БХВ-Петербург, 2011. – 768 с.
10. Сорохтин М.М. Алгоритмы обнаружения и определения временного сдвига сигналов коротких информационных пакетов с фазовой манипуляцией. // Тр. XII научной конференции по радиофизике (Нижний Новгород, 7 мая 2008 г.), Н.Новгород, ННГУ, 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ | 2004 |
|
RU2274956C2 |
| КОНВЕЙЕРНЫЙ ПРИЕМНИК БАЗОВОЙ СТАНЦИИ СОТОВОЙ ЯЧЕЙКИ ДЛЯ УПЛОТНЕНННЫХ СИГНАЛОВ С РАСШИРЕННЫМ СПЕКТРОМ | 1996 |
|
RU2154913C2 |
| ВРЕМЕННОЙ ДИСКРИМИНАТОР УСТРОЙСТВА ТАКТОВОЙ СИНХРОНИЗАЦИИ | 2006 |
|
RU2314646C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВИДА МОДУЛЯЦИИ | 2007 |
|
RU2361368C2 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ДЕМОДУЛЯТОРА СИГНАЛОВ С ШЕСТНАДЦАТИПОЗИЦИОННОЙ АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2013 |
|
RU2550548C2 |
| ЧУВСТВИТЕЛЬНОЕ К СКОРОСТИ УПРАВЛЕНИЕ МОЩНОСТЬЮ | 2003 |
|
RU2323523C2 |
| СПОСОБ ТАКТОВОЙ И ЦИКЛОВОЙ СИНХРОНИЗАЦИИ С ОЦЕНКОЙ КАЧЕСТВА ПРИ ПЕРЕДАЧЕ ДИСКРЕТНЫХ СООБЩЕНИЙ АМПЛИТУДНО-МАНИПУЛИРОВАННЫМИ СИГНАЛАМИ С МНОГОКРАТНЫМ ЧАСТОТНО-ВРЕМЕННЫМ РАЗНЕСЕНИЕМ | 2019 |
|
RU2711256C1 |
| УСТРОЙСТВО И СПОСОБ СЛЕЖЕНИЯ ЗА РАДИОЧАСТОТОЙ И ЕЕ ЗАХВАТА | 2003 |
|
RU2321955C2 |
| СПОСОБ ОЦЕНИВАНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ ПРИ ИСПОЛЬЗОВАНИИ СИГНАЛОВ С ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2012 |
|
RU2548032C2 |
Изобретение относится к области радиотехники. Способ демодуляции кратковременных сигналов многоуровневой абсолютной фазовой модуляции в условиях замираний заключается в выполнении аналого-цифрового преобразования входного случайного процесса (ВСП), решении задачи обнаружения сигнала в ВСП для запуска или остановки демодулятора, определении границ элементарных посылок при помощи устройства тактовой синхронизации (УТС), выделении первой элементарной посылки из обрабатываемой выборки принимаемого сигнала и ее сдвига по фазе на 90° с использованием преобразования Гильберта, записи первой элементарной посылки принимаемого сигнала и ее задержанной на 90° копии в запоминающие устройства (ЗУ) для последующего использования в качестве опорных колебаний, потактном, под управлением УТС, детектировании принимаемого сигнала квадратурным методом - умножением текущей элементарной посылки и хранящихся в ЗУ первой элементарной посылки сигнала и ее копии, задержанной по фазе на 90°, интегрировании детектированных напряжений раздельно в синфазном и квадратурном каналах и решении системы уравнений для определения значения принятого информационного символа в устройстве принятия решения. Технический результат - уменьшение минимальной длительности сеанса связи, а также уменьшение вероятности ошибки 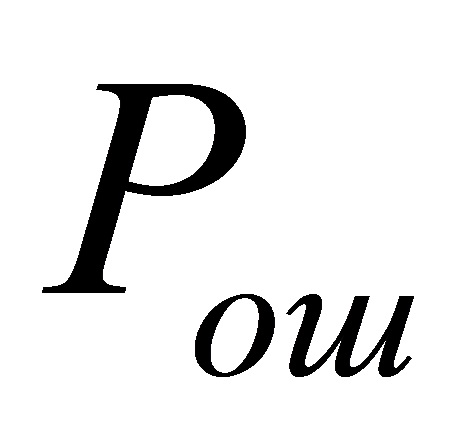 демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии. 6 ил.
демодуляции сигналов абсолютной ФМ-М при замираниях на радиолинии. 6 ил.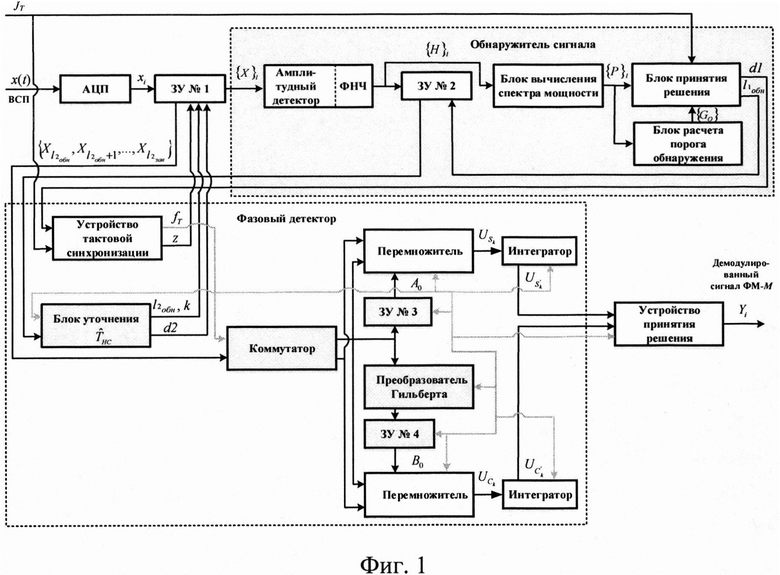
Способ демодуляции кратковременных сигналов многоуровневой абсолютной фазовой модуляции в условиях замираний, включающий аналого-цифровое преобразование входного случайного процесса, определение границ элементарных посылок устройством тактовой синхронизации, детектирование принимаемого сигнала квадратурным методом, интегрирование детектированных напряжений раздельно в синфазном и квадратурном каналах, решение системы уравнений для определения значения переданного информационного символа в устройстве принятия решения, отличающийся тем, что начало и окончание работы демодулятора определяются обнаружителем сигнала, запускающим устройство тактовой синхронизации, тактовая синхронизация выполняется до фазового детектирования, что позволяет демодулировать сигналы с ФМ-М на радиочастоте, в качестве опорного колебания используется первая элементарная посылка сигнала, причем делается допущение о том, что она имеет фазу 45°, квадратурная обработка производится умножением сигнала в квадратурном канале на первую элементарную посылку, а в синфазном – на ее копию, задержанную по фазе на 90°.
| ДЕМОДУЛЯТОР МНОГОПОЗИЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2246794C1 |
| ИВКОВ С.В | |||
| и др | |||
| Анализ помехоустойчивости метода относительной демодуляции кратковременных сигналов с многоуровневой абсолютной фазовой модуляцией в условиях замираний, IV Всероссийская научно-техническая конференция " РТИ Системы ВКО-2016": труды конференции, Москва: изд-во МГТУ им.Н.Э | |||
| Баумана, 2017, с.421-429 | |||
| НОХРИН О.А и др | |||
| Анализ помехоустойчивости метода относительной демодуляции сигналов ФМ в условиях замираний, ж | |||
| Наукоемкие технологии, т.16, #12, 2015, с.9 - 13 | |||
| Магнтно-транзисторный ключ постоянного тока | 1973 |
|
SU746931A1 |

