Изобретение относится к радиолокации и предназначено для обнаружения наземных движущихся целей.
Характерной особенностью наземных движущихся целей является сравнительно малая скорость их движения (на два порядка меньше скоростей аэродинамических и баллистических объектов). При этом спектры сигналов от целей и помех, обусловленных отражениями от колеблющейся под действием ветра растительности, в значительной мере перекрываются.
В результате этого на выходе фильтра СДЦ при радиолокации малоскоростных наземных целей существуют остатки от указанных помех, уровень которых превышает уровень собственных шумов приемника. Возникает задача обнаружения сигналов, отраженных движущимися целями на фоне коррелированных шумов (остатков от помех) при постоянном уровне ложных тревог.
Известен способ обнаружения сигналов, отраженных от наземных движущихся целей со стабилизацией ложных тревог по однородным в пространстве помехам, осуществляемый путем усреднения мощности остатков помех по элементам дальности. Известны также другие технические решения, реализующие данный способ, отличающийся алгоритмами формирования оценок мощностей остатков помех с использованием знаковых, ранговых, порядковых статистик.
К недостаткам данного способа следует отнести требование пространственной однородности помех.
Эффективность способа резко снижается в случае неоднородной по дальности помехи. В этом случае дисперсия оценки помехи возрастает, а качество обнаружения падает.
Земные ландшафты в большинстве случаев, представляющих интерес, обладают существенной пространственной неоднородностью. При этом амплитуда отраженного от земной поверхности сигнала распределена по закону Вейбула и интервал ее корреляции не превышает десятков метров.
Известен более совершенный способ обнаружения целей со стабилизацией ложных тревог, осуществляемый путем оценки мощности остатка помехи, не требующий пространственной однородности помех. Согласно данному способу оценка мощности остатка помехи на выходе режекторного фильтра производится в частотной области и осуществляется фильтрацией составляющих в спектре помехи, расположенных в непосредственной близости от полосы прозрачности режекторного фильтра с последующим взятием модуля и накоплением этих составляющих. Значение порогового уровня формируется умножением полученной оценки мощности остатка помехи на постоянный масштабный коэффициент.
Решение о наличии цели принимается при условии превышения оцененного уровня мощности сигнала с выхода режекторного фильтра над пороговым уровнем.
Устройство для осуществления данного способа содержит последовательно соединенные режекторный фильтр, первую схему выделения огибающей, первый накопитель, пороговое устройство, последовательно соединенные фильтр выделения помехи, вторую схему выделения огибающей, второй накопитель, масштабирующий каскад, причем входы режекторного фильтра и фильтра выделения помехи соединены и являются входом устройства, а выход второго накопителя соединен с вторым входом порогового устройства, выход которого является выходом устройства.
К недостаткам способа, реализованного в этом устройстве, относятся противоречивые требования к полосовому фильтру, предназначенному для оценки мощности остатка помех.
С одной стороны, он должен быть настроен так, чтобы его полоса пропускания на оси частот располагалась в непосредственной близости от полосы пропускания режекторного фильтра, чтобы производить наиболее достоверную оценку мощности остатка помехи в полосе прозрачности режекторного фильтра, но при этом мощность полезного сигнала, попадающего в полосу фильтра оценки помехи, будет снижать вероятность обнаружения цели.
С другой стороны, для оценки мощности остатка узкополосной помехи, имеющей быстроспадающий спектр, необходимо иметь ширину полосы пропускания помехового фильтра не более ширины спектра самой помехи, а при воздействии широкополосной помехи ширина полосы пропускания этого фильтра должна быть большой, что позволяет получить меньшую дисперсию оценки. Поэтому на практике обнаружители, построенные на основе данного способа, эффективны только при воздействии узкого класса помех.
Целью изобретения является повышение вероятности обнаружения малоразмерных целей на фоне нестационарных по дальности помех с различной шириной спектра.
Это достигается тем, что при способе, включающем режекцию низкочастотной помехи, выделение огибающей сигнала, накопление отсчетов огибающей и сравнение накопленного значения с адаптивным порогом, осуществляют измерение корреляционной функции сигнала, полученного в результате режекции низкочастотной помехи, выделяют огибающую корреляционной функции, затем режектируют помеховые компоненты огибающей корреляционной функции, накапливают полученные отсчеты огибающей корреляционной функции и результат сравнивают с адаптивным порогом, в качестве которого используют промасштабированный в соответствии с заданным уровнем ложной тревоги нулевой отсчет огибающей корреляционной функции.
Цель достигается также тем, что в устройстве, включающем последовательно соединенные накопитель и пороговое устройство, введены последовательно соединенные первый и второй блоки преобразования, каждый из которых состоит из блока преобразования Фурье (БПФ), входы которого являются входами блока преобразования, первого и второго квадраторов, сумматора, умножителя и запоминающего устройства, при этом первые и вторые выходы БПФ соединены с входами соответственно первого и второго квадраторов, выходы первого и второго квадраторов соединены соответственно с первыми и вторыми входами сумматора, выход которого соединен с первыми входами умножителя, вторые входы которого соединены с выходами запоминающего устройства, а выходы умножителя являются выходами блока преобразования, причем входы первого блока преобразования являются входами устройства, первый выход второго блока преобразования соединен с опорным входом порогового устройства, а другие выходы второго блока преобразования соединены с входами накопителя, при этом выход порогового устройства является выходом всего устройства.
Предложенный способ обнаружения отличается от известных тем, что позволяет уйти от необходимости осуществлять оценку мощности остатка помехи после режекции, которую затруднительно выполнять точно в реальном масштабе времени из-за дисперсии оценки и отсутствия априорной информации о виде помехи.
В отличие от известных способов обнаружения, которые предполагают измерение энергии полезного сигнала и сравнение измеренного значения с пороговым уровнем, по предлагаемому способу производится измерение степени коррелированности (узкополосности) сигнала и сравнение измеренного значения с пороговым уровнем.
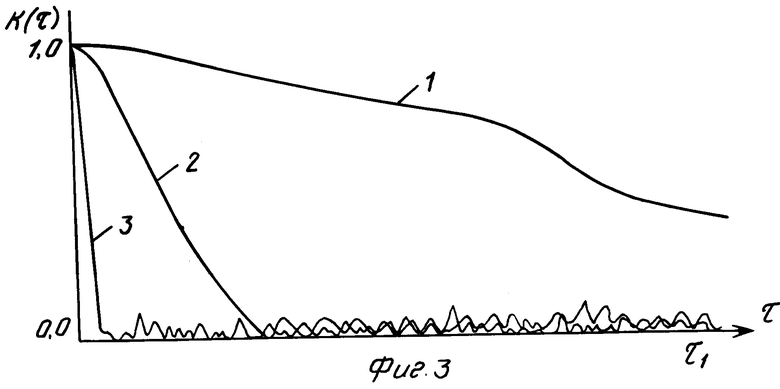
На фиг. 1 представлены спектр сигнала (кривая 1), помехи (кривая 2) и шум (кривая 3) до выполнения операции режектирования низкочастотных помех, а также квадрат амплитудно-частотной характеристики режекторного фильтра (кривая 4); на фиг. 2 спектр сигнала (кривая 1), помехи (кривая 2) и шума (кривая 3) после операции режектирования низкочастотных помех; на фиг. 3 корреляционные функции сигнала (1), остатка помехи (2) и шума (3) после режектирования низкочастотной помехи; на фиг. 4 пример выполнения заявляемого устройства.
В соответствии с предложенным способом обнаружения вначале принимают радиолокационный сигнал, отраженный наземными движущимися целями. Характерными особенностями таких сигналов являются их относительно узкий спектр и наличие доплеровского смещения частоты, в то же время сигналы, отраженные от флуктуирующих местных предметов, имеют, как правило, более широкий спектр, расположенный вблизи нулевой доплеровской частоты.
Затем производят режектирование низкочастотной составляющей помех. Целью данной операции является с одной стороны улучшение отношения мощности сигнала к мощности помехи за счет подавления низкочастотной компоненты помехи, с другой стороны частичное ее выбеливание, т.е. расширение ее спектра. В результате после операции режектирования задача обнаружения значительно облегчается, так как имеет место надежный признак ширина спектра. Если сигнал узкополосный, то это движущаяся цель, если широкополосный флуктуирующий "местник".
П р и м е р. Пусть когерентная РЛС работает в коротковолновой части сантиметрового диапазона. Тогда доплеровский спектр помех, обусловленный отражениями от земной поверхности имеет вид обратной степенной зависимости с показателем степени равным 3. Ширина спектра зависит от скорости ветра вблизи поверхности земли. При скорости ветра 10 м/с ширина спектра помех по уровню минус 3 дБ в пределах 40-50 Гц. Если РЛС должна обнаруживать цели, движущиеся с радиальными скоростями свыше 3-4 км/ч, то частота среза фильтра СДЦ (режектора помех) будет равна 50-60 Гц. При этом ширина спектра остатка помехи на выходе режекторного фильтра по уровню минус 3 дБ составит 120-140 Гц, что значительно превышает ширину спектра полезного сигнала равную 3-10 Гц.
При малой скорости ветра (3-5 м/с) помеха на входе обнаружителя более узкополосная и ширина ее спектра по уровню минус 3 дБ составляет 10-20 Гц, однако на выходе режектора ширина спектра остатка помех меняется незначительно и составляет 100-110 Гц.
Две последующие операции измерения корреляционной функции и выделение ее огибающей позволяют далее строить обнаружение полезного сигнала по критерию его коррелированности (узкополосности).
Операция режектирования компонент корреляционной функции с малым интервалом корреляции позволяет исключить из рассмотрения сигналы шириной спектра более определенной величины.
После операции режектирования компонент с малым интервалом корреляции производится накопления компонент с большим интервалом корреляции, обусловленных узкополосным сигналом.
После накопления сильно коррелированных компонент огибающей корреляционной функции производится сравнение результата накопления с промасштабированным нулевым отсчетом корреляционной функции, представляющим собой оценку мощности сигнала на выходе режектора низкочастотной помехи. Масштабный коэффициент выбирается в соответствии с заданной вероятностью ложной тревоги. Полезный сигнал считается обнаружением, если результат накопления, характеризующий мощность коррелированных компонент в сигнале, в необходимое число раз превышает полную мощность сигнала.
Последняя операция позволяет стабилизировать ложную тревогу при изменении мощности помехи и шума.
Предложенный обнаружитель наземных движущихся целей содержит первый блок преобразования, состоящий из блока быстрого преобразования Фурье (БПФ) 1, первого квадратора 2, второго квадратора 3, сумматора 4, умножителя 5, первого блока памяти 6, второй блок преобразования, состоящий из второго блока БПФ 7, третьего квадратора 8, четвертого квадратора 9, сумматора 10, умножителя 11, второго блока памяти 12, а также содержит накопитель 13 и пороговый блок 14.
В предлагаемом обнаружителе на вход БПФ 1 поступают N отсчетов входного сигнала, представляющего собой аддитивную смесь узкополосного полезного сигнала, широкополосного шума и низкочастотной помехи, которая может быть как узкополосной, так и широкополосной. В блоке БПФ 1 производится разложение исходного сигнала по ортогональным гармоническим функциям. При этом на первом и втором выходах блока БПФ 1 образуются соответственно N коэффициентов разложения по косинусам и N по синусам различных частот. С первого и второго выходов блока БПФ 1 косинусные и синусные отсчеты поступают на входы квадратора 2 и квадратора 3 соответственно, затем после возведения их в квадрат поступают соответственно на первый и второй вход сумматора 4.
Результат суммирования, представляющий собой N отсчетов спектральной плоскости мощности входного сигнала поступает на первый вход умножителя 5, на второй вход которого поступают N постоянных коэффициентов с выхода блока памяти 6. Коэффициенты, хранящиеся в блоке 6, выбираются так, чтобы спектральные составляющие, расположенные в диапазоне частот полезного сигнала, оставались без изменения, а низкочастотные помехи, расположенные в области нулевых доплеровских частот, подавлялись. Степень подавления помех на выходе умножителя 5 зависит от ширины спектральной плотности низкочастотной помехи на выходе обнаружителя, так узкополосные низкочастотные помехи могут быть подавлены на 50-60 дБ, а широкополосные помехи на 10-20 дБ, при этом за счет подавления основного лепестка их спектр становится более широкополосным. Выходной сигнал с умножителя 5, представляющий собой N отсчетов спектральной плотности сигнала после режектирования низкочастотных составляющих помех от местных предметов, поступает на вход блока БПФ 7.
На первом и втором выходах блока БПФ 7 образуется соответственно N косинусных, N синусных отсчетов корреляционной функции огибающей входного сигнала с подавленными низкочастотными составляю- щими, которые затем поступают соответственно на вход квадраторов 8 и 9 и далее после возведения отсчетов в квадрат на первый и второй входы сумматора 10. На выходе сумматора 10 формируется N отсчетов квадрата корреляционной функции огибающей входного сигнала после режектирования помех. С выхода сумматора 10 отсчеты квадрата корреляционной функции поступают на вход умножителя 11, на второй вход которого поступают N постоянных коэффициентов с выхода блока 12.
С выхода умножителя отсчет с нулевым номером поступает на опорный вход порогового устройства 14, а отсчеты, имеющие номер с первого по N-1, поступают на вход накопителя 13, с выхода накопителя 13 число, равное сумме отсчетов огибающей квадрата корреляционной функции входного сигнала, после режектирования низкочастотных помех поступает на сигнальный вход порогового устройства 14. В блок памяти 12 коэффициенты с номерами с первого по N-1 выбраны так, чтобы полностью подавить отсчеты корреляционной функции с малыми номерами, а отсчеты корреляционной функции с большими номерами оставить без изменения. В этом случае при неизменном числе накапливаемых отсчетов, распределение сигналов на выходе накопителя не будет изменяться при изменении спектральной плотности низкочастотной помехи на выходе обнаружителя, так как после операции режектирования низкочастотных спектральных составляющих помех в умножителе 5 интервал корреляции остатков помех будет не более 8-32 отсчетов.
Величина сигнала с выхода накопителя 13 при отсутствии полезного сигнала будет зависеть только от мощности широкополосных помех (шумов приемника и остатков низкочастотных помех).
Поскольку нулевой отсчет выходного сигнала умножителя 11, являющийся нулевым отсчетом корреляционной функции, умноженным на нулевой коэффициент блока 12, при отсутствии полезного сигнала также зависит только от мощности широкополосных помех, соотношение сигналов на сигнальном и пороговом входе порогового устройства будет неизменным при воздействии на вход обнаружителя любых низкочастотных, а также любых широкополосных помех. При этом изменением коэффициента с нулевым номером может быть задана необходимая вероятность ложной тревоги.
В отличие от широкополосных помех узкополосный полезный сигнал имеет интервал корреляции не менее 256 отсчетов, поэтому в данном случае на выходе накопителя 13 будет иметь место не сумма отсчетов огибающей корреляционной функции декоррелированных помех, математическое ожидание отсчетов которой равно  , а сумма отсчетов корреляционной функции полезного сигнала с математическим ожиданием К ˙Nн σ2, при этом σ2 мощность сигнала на входе второго блока преобразователя; Nн число накапливаемых отсчетов корреляционной функции; К усредненный по номерам накапливаемых отсчетов коэффициент корреляции.
, а сумма отсчетов корреляционной функции полезного сигнала с математическим ожиданием К ˙Nн σ2, при этом σ2 мощность сигнала на входе второго блока преобразователя; Nн число накапливаемых отсчетов корреляционной функции; К усредненный по номерам накапливаемых отсчетов коэффициент корреляции.
Таким образом, при подаче на вход обнаружителя узкополосного полезного сигнала на сигнальном входе порогового устройства будет иметь место превышения порогового уровня.
Предлагаемый способ обнаружения наземных движущихся целей и обнаружитель для реализации данного способа по сравнению с другими известными аналогичными техническими решениями обеспечивает следующие повышение вероятности обнаружения наземных движущихся целей при стабильном уровне ложных тревог; стабилизацию уровня ложных тревог при воздействии широкополосных помех, в том числе не являющихся низкочастотными.
Сравнение рабочих характеристик устройства, реализующего предлагаемый способ и устройства-прототипа, полученных статистическим моделированием на ЭВМ, показало преимущество предлагаемого устройства при обнаружении сигналов, отраженных целями с малыми радиальными скоростями.
Предлагаемое устройство практически инвариантно к ширине и форме спектра помехи и не требует дополнительной подстройки в изменяющихся метеоусловиях. В отличие от прототипа предлагаемое устройство работоспособно при воздействии широкополосных (ширина спектра которых в 5-10 раз превышает ширину спектра сигнала) помех, имеющих доплеровский сдвиг центральной частоты (гидрометеоры, отражение от взволнованной водной поверхностью).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ УЗКОПОЛОСНОГО РАДИОСИГНАЛА | 2002 |
|
RU2237261C2 |
| ЦИФРОВОЙ ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ | 2014 |
|
RU2575481C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1998 |
|
RU2173468C2 |
| ЦИФРОВОЙ ОБНАРУЖИТЕЛЬ РАДИОСИГНАЛОВ В УСЛОВИЯХ ШУМА НЕИЗВЕСТНОЙ ИНТЕНСИВНОСТИ | 2014 |
|
RU2563889C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНОГО СИГНАЛА | 2001 |
|
RU2206179C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413238C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ НА ФОНЕ УЗКОПОЛОСНЫХ ПОМЕХ | 1996 |
|
RU2112249C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |


Использование: в радиолокации. Сущность изобретения: по способу обнаружения наземных движущихся целей для повышения вероятности обнаружения малоскоростных целей на фоне нестационарных по дальности помех после выделения огибающей сигнала определяют ее корреляционную функцию, выделяют ее огибающую, режектируют помеховые составляющие огибающей, накапливают сигналы прорежектированной огибающей, в качестве порога используют промасштабированный в соответствии с заданным уровнем ложной тревоги нулевой отсчет огибающей корреляционной функции. устройство, реализующее способ, содержит блоки 1, 7 быстрого преобразования Фурье, квадраторы 2, 3, 8, 9, сумматоры 4, 10, умножители 5, 11, блоки памяти 6, 12, накопитель 13, пороговый блок 14. 2 с.п. ф-лы, 4 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кузьмин С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| М | |||
| : Радио и связь, 1986, с.31,50. | |||
