Изобретение относится к радиолокационной технике, в частности к импульсно-доплеровским радиолокационным станциям (РЛС), и может использоваться для обеспечения возможности детального анализа спектра сигнала в пределах элемента разрешения по критерию Релея, в том числе численного состава обнаруженного в нем движущегося объекта, а также в случае применения заявляемого устройства в моноимпульсных РЛС для точного определения доплеровской частоты каждой отдельной цели в группе и ее углового положения.
Широко известны обнаружители когерентных радиолокационных сигналов (А.И.Перов. Статистическая теория радиотехнических систем. «Радиотехника», 2003 г.). В них характеристики разрешения по частоте, так называемого «разрешения в режиме согласования обработки сигналов» (Я.Д.Ширман, В.Н.Манжос. Теория и техника обработки радиолокационной информации на фоне помех. «Радио и связь», М., 1981 г.), определяются условиями согласованного приема сигналов на фоне собственного шума и характеризуются критерием Релея. В таких обнаружителях достижение высокого разрешения по частоте для определения численного состава групповой цели связано с увеличением объема выборки эхосигнала. Однако в современных многоцелевых РЛС промежуток времени, отводимый в ходе обзора контролируемой области для одного углового направления, ограничен и в ряде случаев не позволяет реализовать требуемое разрешение. Поэтому решение задачи раздельного наблюдения целей откладывают до перехода к этапу их сопровождения, когда дефицит времени, отводимого для накопления необходимого объема входных данных, не стоит столь остро. Пример такого технического решения при использовании в качестве «доплеровских фильтров» отсчетов дискретного преобразования Фурье (ДПФ) приводится в работе (А.А.Форштер. Распознавание и определение численного состава групповой воздушной цели. «Радиотехника», 2004, №8), в которой наращивание объема входной выборки достигается объединением нескольких интервалов наблюдения в режиме сопровождения. Однако кроме увеличения времени накопления этому простому для реализации техническому решению свойственны довольно высокая вероятность ошибки в оценке численного состава групповой цели, а также повышенная погрешность в оценке частот разрешенных сигналов.
Известны также радиолокационные обнаружители, обеспечивающие оптимальное разрешение сигналов, под которым понимается оптимальное обнаружение полезного сигнала на фоне совместного воздействия собственного шума и мешающих сигналов (П.А.Бакут и др. Вопросы статистической теории радиолокации. Под общей редакцией Г.П.Тартаковского, т.II, «Советское Радио», М., 1964 г.). Реализация таких обнаружителей предусматривает многоканальность обработки (параметрирование) для всех возможных сочетаний полезного сигнала и остальных, относимых к помехам. В результате практическое использование их из-за возникающих сложностей, по-видимому, оправдано лишь при достаточно жестких ограничениях в отношении числа и положения целей, однако знание потенциальных характеристик разрешения важно при сравнении близости качества реальных устройств к оптимальным.
В настоящее время получили распространение методы параметрического спектрального оценивания случайных процессов, а также линейной комбинации действительных или комплексных экспонент (С.Л.Марпл-мл. Цифровой спектральный анализ и его приложения. «Мир», М., 1990 г.), позволяющие достичь очень высокого разрешения сигналов, в том числе гармонических, по частоте. Однако эти результаты можно получить только при весьма большой величине отношения сигнал/шум в анализируемой выборке на входе устройства обработки (5-10 дБ и более), в противном случае точность оценок оказывается неудовлетворительной, к тому же возникает большое число ложных отсчетов. В импульсно-доплеровских радиолокационных станциях, для которых предназначены рассматриваемые обнаружители, этот показатель составляет величину -20...-5 дБ (необходимое для достижения требуемой вероятности правильного обнаружения значение отношения сигнал/шум на входе порогового устройства в 12-15 дБ обеспечивается в них за счет когерентного накопления сигнала и повышения благодаря этому величины отношения сигнал/шум приблизительно на 10logM (М - объем входной выборки) относительно уровня на входе устройства обработки).
Из известных технических решений наиболее близким является обнаружитель-измеритель произвольных параметров (в том числе частоты) сигналов нескольких источников излучения (В.В.Абраменков. Структура оптимального измерителя параметров в многосигнальных ситуациях. Авионика, 2002-2004, (сб. статей), под ред. А.И.Канащенкова, «Радиотехника», М., 2005 г., стр.215-217). Он построен на основе односигнального обнаружителя с добавлением последующей весовой обработки значений взаимно корреляционных функций (ВКФ) принятого и зондирующего сигналов. В качестве весовых коэффициентов выступают значения автокорреляционной функции (АКФ) зондирующего сигнала, которые известны до приема сигнала и могут быть рассчитаны и запомнены заранее.
Недостатком прототипа является требование априорного знания числа обнаруживаемых целей, а также сложность (или большой объем вычислений) при практической реализации, поскольку требуется формирование взаимных корреляционных функций (ВКФ) при различных комбинациях взаимных расстроек ожидаемых сигналов по оцениваемому параметру (частоте).
Задачей изобретения является повышение эффективности обнаружителя радиолокационных сигналов за счет обеспечения возможности оценки численного состава обнаруженного движущегося группового объекта, а также точного определения доплеровской частоты каждой отдельной цели в группе и ее углового положения (в случае применения заявляемого устройства в моноимпульсных РЛС) путем детального анализа спектра принятого сигнала в пределах элемента спектрального разрешения по критерию Релея.
Решение поставленной задачи достигается тем, что в многоканальном обнаружителе когерентных импульсных сигналов с N однотипными каналами дальности, каждый из которых включает блок амплитудно-весовой обработки (АВО), блок формирования частотного спектра (БФС) входного сигнала на основе алгоритма быстрого преобразования Фурье (БПФ), амплитудный детектор (АД) и пороговое устройство (ПУ) в каждом частотном канале, к объединенному выходу пороговых устройств N каналов дальности дополнительно подключены блок цифрового гетеродинирования (БЦГ), последовательно соединенные первый и второй коммутаторы, буферное запоминающее устройство (БЗУ), блок обратного дискретного преобразования Фурье (БОДПФ), умножитель и вычислительное устройство, причем управляющий вход первого коммутатора соединен с выходами ПУ всех каналов дальности, управляющий вход второго коммутатора - с первым выходом БЦГ, управляющий вход БЗУ - со вторым выходом БЦГ, а на второй вход умножителя поданы сигналы множителей, обратных по величине коэффициентам исходной весовой функции окна для спектрального анализа с амплитудно-весовой обработкой, а к выходным сигналам обнаружителя, снятым с выходов ПУ и поступающим на вторичную обработку и индикацию, с выхода вычислительного устройства добавляются данные о числе целей в группе, значениях доплеровских сдвигов и, в зависимости от возлагаемых на РЛС задач, значениях амплитуд и фаз их эхосигналов.
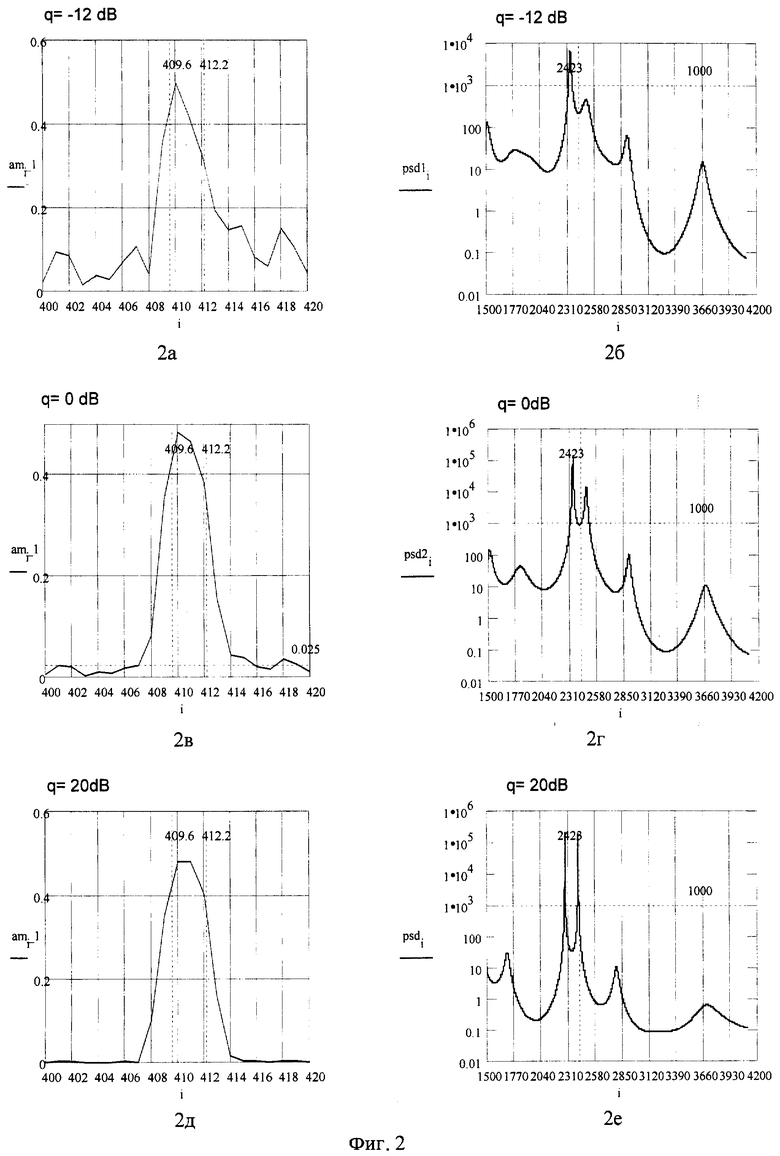
На фиг.1 приведена блок-схема заявляемого устройства с подробным начертанием одного из N однотипных каналов дальности обнаружителя в импульсно-доплеровской РЛС. На фиг.2 графики слева (2а, 2в, 2д) отображают огибающую отсчетов спектра входного сигнала на выходе блока формирования спектра (доплеровской фильтрации), а графики справа (2б, 2г, 2е) - то же после дополнительной обработки сигнала с целью достижения высокого разрешения по частоте при одинаковом входном отношении сигнал/шум: соответственно при входном отношении сигнал/шум qвх=-10 дБ (а, б), qвх=0 дБ (в, г), qвх=20 дБ (д, е).
Обнаружитель радиолокационных сигналов (фиг.1) содержит последовательно соединенные в каждом отдельном канале дальности импульсно-доплеровской РЛС блок амплитудно-весовой обработки (АВО) 1 выборки входного воздействия («пачки» импульсов), блок формирования спектра (БФС) 2 анализируемого сигнала, амплитудный детектор (АД) 3 и пороговое устройство (ПУ) 4, подключенные к выходам пороговых устройств 4 всех каналов дальности блок цифрового гетеродинирования (БЦГ) 5, предназначенный для установления номеров частотных отсчетов на выходе блока формирования спектра (БФС), подлежащих дальнейшей обработке, и первый коммутатор 6, подключающий к вновь вводимым блокам обнаружителя канал дальности с сигналом обнаруженной цели с выхода БФС, второй коммутатор 7 для передачи комплексных значений спектральных отсчетов сигнала в БЗУ 8, блок обратного дискретного преобразования Фурье (БОДПФ) 9, умножитель 10 результата обратного дискретного преобразования Фурье (ОДПФ) на множители, обратные по величине коэффициентам исходной весовой функции, и вычислительное устройство 11, осуществляющее спектральный анализ выходного сигнала умножителя с высоким разрешением по частоте.
Каждый отдельный канал дальности обнаружителя когерентного сигнала, включающий блоки АВО 1, БФС 2 и амплитудного детектирования 3, а также пороговое устройство 4, предназначен для обнаружения эхосигналов во всем требуемом диапазоне доплеровских частот. Блок АВО 1 служит для снижения уровня боковых лепестков амплитудно-частотной характеристики (АЧХ) доплеровского фильтра за счет применения одного из известных спектральных окон (Ф.Дж.Хэррис. Использование окон при гармоническом анализе методом дискретного преобразования Фурье. ТИИЭР, т.66, №1, январь 1978 г.), например часто употребляемого окна Дольф-Чебышева (здесь и далее в описании изобретения используется функциональная эквивалентность понятий «доплеровский фильтр» и «отсчет БПФ»).
Блок цифрового гетеродинирования 5 на основании данных с выхода пороговых устройств 4 определяет для канала дальности с обнаруженным сигналом номера спектральных отсчетов (доплеровских фильтров) на выходе блока формирования спектра сигнала 2, требующихся для дальнейшей обработки, и номера ячеек БЗУ 8, в которые эти отсчеты записываются. Тем самым осуществляется цифровое гетеродинирование обнаруженного сигнала в середину диапазона анализируемых частот, совпадающую в данном случае с половиной частоты повторения зондирующего сигнала (или частоты выборки входного сигнала). Кроме цифрового гетеродинирования здесь же производится и ограничение протяженности спектра профильтрованного сигнала, восстанавливаемого путем обратного преобразования Фурье во временную область. Производимые преобразования при этом основаны на следующих выражениях. Пусть, например, a(m) - комплексный спектральный отсчет на выходе блока формирования спектра 2 с номером m (m=1, 2...M, M - число доплеровских фильтров в каждом канале дальности, численно равное объему входной выборки); A(k), (k=1, 2...M) - эти же (а(m)) спектральные отсчеты, преобразованные для записи в k-тую ячейку БЗУ 8, m0 - номер спектрального отсчета (доплеровского фильтра) с обнаруженным сигналом, mR - число сохраняемых спектральных компонент обнаруженного сигнала (одной боковой полосы), mR=1-2. Тогда данные с выхода БФС 2 размещаются в ячейках БЗУ 8 следующим образом. В центральную ячейку с номером, равным М/2, записывается спектральный отсчет с выхода БФС с номером m0, соответствующим середине спектра обнаруженного сигнала

Подлежащие дальнейшей обработке остальные 2* mR спектральных отсчетов размещаются симметрично относительно центрального:

В оставшиеся ячейки БЗУ записываются нули:

Указанные операции обеспечивают 1) существенное увеличение отношения сигнал/шум после последующего преобразования сигнала во временную область с помощью алгоритма ОДПФ благодаря обнулению спектральных отсчетов за пределами выделенного участка протяженностью 2*mR, в которых составляющие сигнала пренебрежимо малы (выигрыш около 10log(M/(2*mR)), где M - объем входной выборки или число импульсов в «пачке»); 2) исключение "концевого эффекта", когда часть подлежащего сохранению спектра сигнала попадает в отсекаемую область, т.е. номера спектральных отсчетов меньше 0 или больше M; 3) снижение в восстанавливаемом сигнале искажений типа осцилляций Гиббса, возникающих из-за ограничения протяженности спектра сигнала. Эти искажения при дальнейшем спектральном оценивании с высоким разрешением могут привести к появлению ложных сигналов. Благодаря симметричному отсечению боковых составляющих спектра сигнала степень искажений в восстанавливаемом сигнале уменьшается. Коммутаторы 6 и 7, выполненные с использованием распостраненных микросхем, например, из наборов серий К561, К566, предназначены для передачи значений комплексных спектральных отсчетов с выхода блока формирования спектра 2 в канале дальности (n), в котором обнаружен сигнал, на вход БЗУ 8.
Блок обратного дискретного преобразования Фурье 9 служит для осуществления обратного преобразования Фурье известным способом на основе того же алгоритма БПФ (Л.Рабинер, Б.Гоулд. Теория и применение цифровой обработки сигналов. "Мир", М., 1978 г., стр.410-411). Этот блок может быть выполнен, например, на микросхемах серий К561, К566 и др. указанным в этой же книге способом (глава 10).
Умножитель 10, выполненный, например, на микросхемах упомянутых серий, предназначен для устранения влияния на результат последующей обработки действия спектрального окна при АВО в блоке 1. Множители {wi -1}, i=1, 2...M, на которые умножаются отсчеты восстанавливаемого сигнала во временной области, обратны по величине коэффициентам исходной весовой функции окна {wi}, i=1, 2...M.
Вычислитель 11 предназначен для осуществления параметрического спектрального оценивания выходного сигнала умножителя 10 по одному из известных алгоритмов, например алгоритму Прони, алгоритму MUSIC, алгоритму на основе метода собственных значений ковариационной матрицы данных, алгоритму авторегрессионного спектрального оценивания и др., которые рассмотрены, например, в упоминавшейся на стр.2 книге С.Л.Марпла-мл. Выбор определяется характером анализируемого сигнала (совокупность гармонических колебаний или случайных процессов) и поставленными целями (определение числа сигналов и их частот или дополнительно их интенсивностей). Реализации программ, написанных на FORTRAN для указанных алгоритмов спектрального оценивания сигналов, приведены в этой же книге: алгоритм Прони - стр.397-417; алгоритмы MUSIC и на основе метода собственных значений ковариационной матрицы данных - стр.448-450; алгоритм авторегерессионного спектрального оценивания - стр.312-315.
Заявляемое устройство работает следующим образом. На вход обнаружителя радиолокационных сигналов (фиг.1) поступает сигнал с выхода одного из однотипных каналов дальности многоканального (по дальности) приемного устройства РЛС в виде временной выборки объемом М. Далее эта выборка подвергается амплитудно-весовой обработке в блоке АВО 1 с коэффициентами исходной весовой функции окна, поступающими из внешнего запоминающего устройства (ЗУ), преобразованию в частотную область в блоке формирования спектра сигнала 2 и амплитудному детектированию в блоке 3 для каждого доплеровского фильтра. Затем производится сравнение продетектированного сигнала с пороговым значением «П» в пороговом устройстве 4, после чего результаты обработки в виде массива признаков наличия цели ПНЦ (n, m), значение которого (0 или 1) свидетельствует о превышении или непревышении сигналом порога в доплеровском канале с номером m для канала дальности с номером n (на фиг.1 номер канала дальности и номер фильтра, где обнаружен сигнал, снабжены индексом 0), и амплитуды обнаруженного сигнала передаются для вторичной обработки радиолокационной информации и на блок индикации РЛС. Дополнительно массив признаков ПНЦ (n, m) поступает на вход блока цифрового гетеродинирования 5, где по этому массиву определяются номера доплеровских фильтров на выходе блока формирования частотного спектра сигнала 2, для которых значения комплексных спектральных отсчетов подлежат записи в БЗУ 8, и номера ячеек памяти БЗУ 8, куда эти значения должны быть записаны. Запись производится через коммутаторы 6 и 7. Остальные ячейки памяти БЗУ 8 обнуляются. Считанная из БЗУ 8 выборка данных объемом М элементов преобразуется в блоке обратного дискретного преобразования Фурье 9 из частотной области во временную и после поэлементного умножения на множители в блоке 10 подвергается в вычислительном устройстве 11 спектральному оцениванию с высоким разрешением с определением числа целей в группе Кц, значений доплеровских сдвигов частот fдj (j=1, 2...Кц) и, при необходимости, значений амплитуд и фаз их эхосигналов. Эти данные в дополнение к вышеназванным поступают на вторичную обработку и индикацию.
Графики на фиг.2 отображают результаты обработки выборки входного сигнала объемом 1024 при трех значениях отношения сигнал/шум на входе обнаружителя qвх=-10 дБ, 0 дБ и +20 дБ. На входе действуют два сигнала с равными амплитудами и относительными частотами fотн1=0.4000 и fотн2=0.4025 (по определению относительная частота fотн=f/FП, где f - частота сигнала, FП - частота повторения импульсов). На выходе блока формирования спектра БФС 2 Фурье-спектр воздействия представляется группой отсчетов с номерами 406...414 (графики представлены в левом столбце). Видно, что сигналы не разрешаются по частоте по критерию Релея. После дополнительной обработки в соответствии со схемой заявляемого устройства оба сигнала (правая группа графиков) четко позиционируются в центре анализируемой частотной области (участок 2310...2580 преобразованной частотной шкалы с более крупным масштабом). В качестве метода спектрального оценивания использовался метод разложения ковариационной матрицы данных по собственным значениям. При амплитудно-весовой обработке применялось окно Дольфа-Чебышева с уровнем боковых лепестков -90 дБ.
Как уже указывалось, для выполнения заявляемого устройства могут быть использованы, например, отечественные микросхемы на МОП-транзисторах серий К156, К561, К566 и т.п. или зарубежные аналоги: микросхемы серий 4000, МАХ300 и др., а также микропроцессорные наборы других подходящих серий. При реализации операций, выполняемых вводимыми блоками 6-11, частично или полностью могут быть использованы возможности бортовой вычислительной системы.
Использование изобретения позволит повысить эффективность разрешения групповой цели, в том числе определение ее численного состава, при обнаружении объектов с помощью когерентных РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
Изобретение относится к радиолокационной технике и предназначено для обеспечения в ходе обзора контролируемого пространства детального анализа спектра сигнала в пределах элемента разрешения, определяемого критерием Релея. Достигаемый технический результат заключается в определении в ходе обзора с ограниченным временем наблюдения каждого отдельного углового направления численного состава обнаруженного движущегося объекта и в точном определении доплеровской частоты каждой отдельной цели в группе, а также в случае применения заявляемого устройства в моноимпульсных РЛС определении их угловых положений. Технический результат достигается за счет того, что заявленное устройство содержит N однотипных каналов дальности, каждый из которых включает блок амплитудно-весовой обработки, блок формирования частотного спектра входного сигнала на основе алгоритма быстрого преобразования Фурье, амплитудный детектор и пороговое устройство в каждом частотном канале, а также блок цифрового гетеродинирования, последовательно соединенные первый и второй коммутаторы, буферное запоминающее устройство, блок обратного дискретного преобразования Фурье, умножитель и вычислительное устройство, осуществляющее спектральное оценивание выборки преобразованного обнаруженного сигнала. 7 ил.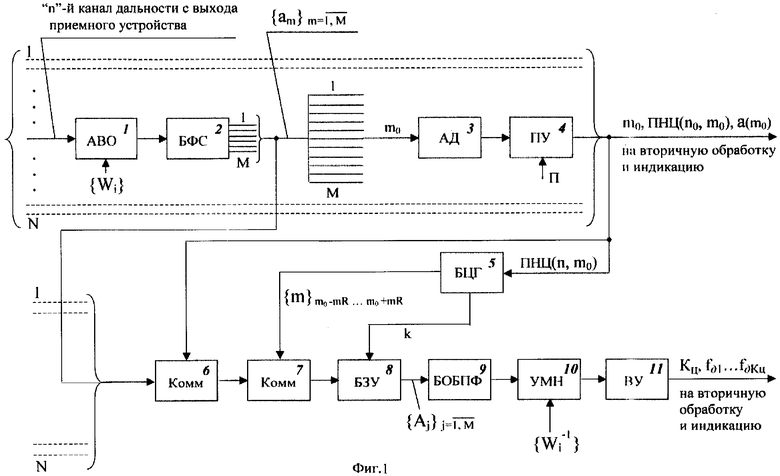
Обнаружитель радиолокационных сигналов с N однотипными каналами дальности, каждый из которых содержит последовательно соединенные блок амплитудно-весовой обработки входного сигнала, на который из внешнего запоминающего устройства (ЗУ) поступают коэффициенты исходной весовой функции окна, блок формирования спектра на основе быстрого преобразования Фурье (БПФ), амплитудный детектор, пороговое устройство, сигнал с выхода которого поступает на вторичную обработку и индикацию, отличающийся тем, что в него дополнительно введены буферное запоминающее устройство (БЗУ), блок цифрового гетеродинирования, предназначенный для определения номеров доплеровских фильтров, для которых значения комплексных спектральных отсчетов подлежат запоминанию, а также для определения номеров ячеек БЗУ, в которые записываются упомянутые отсчеты, два коммутатора, блок обратного дискретного преобразования Фурье, умножитель, вычислительное устройство, предназначенное для параметрического спектрального оценивания выходного сигнала, при этом выходы пороговых устройств всех N однотипных каналов дальности объединены и соединены с входом блока цифрового гетеродинирования и управляющим входом первого коммутатора, первый выход блока цифрового гетеродинирования соединен с управляющим входом второго коммутатора, а второй выход - с вторым входом буферного БЗУ, сигнальный вход первого коммутатора соединен с выходом блока формирования спектра на основе БПФ каждого из N однотипных каналов дальности, выход первого коммутатора соединен с сигнальным входом второго коммутатора, выход второго коммутатора соединен с первым входом БЗУ, выход которого соединен с входом блока обратного дискретного преобразования Фурье, выход последнего присоединен к первому входу умножителя, на второй вход которого из внешнего запоминающего устройства поступают множители, обратные по величине коэффициентам исходной весовой функции окна, выход умножителя соединен с входом вычислительного устройства, выходной сигнал которого дополнительно поступает на вторичную обработку и индикацию.
| АБРАМЕНКОВ В.В | |||
| Структура оптимального измерителя параметров в многосигнальных ситуациях, Авионика, 2002-2004, (сб | |||
| статей)./Под ред | |||
| КАНАЩЕНКОВА А.И | |||
| - М.: Радиотехника, 2005, с.215-217 | |||
| РАДИОПРИЕМНОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ РЛС С ОПТИМАЛЬНОЙ ФИЛЬТРАЦИЕЙ СИГНАЛА | 2003 |
|
RU2255351C1 |
| КОГЕРЕНТНЫЙ ПРИЕМНИК РЛС С ЦИФРОВЫМ УСТРОЙСТВОМ ДЛЯ АМПЛИТУДНОЙ И ФАЗОВОЙ КОРРЕКТИРОВКИ КВАДРАТУРНЫХ СОСТАВЛЯЮЩИХ ПРИНИМАЕМОГО СИГНАЛА | 2004 |
|
RU2273860C2 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2002 |
|
RU2237264C2 |
| US 2005156779 A1, 21.07.2005 | |||
| Стык металлической колонны с фундаментом | 1981 |
|
SU998684A1 |
| Якорная связь | 1982 |
|
SU1041398A1 |

