Изобретение относится к области радиотехники и может быть использовано в панорамных радиоприемных устройствах систем радиомониторинга, станций радиопомех, радиолокационных систем, радиопеленгаторах, средствах радио и радиорелейной связи, а также других устройствах, в которых осуществляется обнаружение сигналов источников радиоизлучения, принимаемых на фоне шума с неизвестной интенсивностью.
Известен оптимальный обнаружитель, содержащий последовательно соединенные приемную антенну, линейный тракт приемника, согласованный фильтр, пороговое устройство, [см. Мартынов В.А., Селихов Ю.И. Панорамные приемники и анализаторы спектра / Под ред. Г.Д. Заварина. - 2-e изд., перераб. и доп. - М.: Советское радио, 1980. - 352 с, ил., рис. 2.6., с. 46].
Недостатком обнаружителя является высокий уровень вероятности ложной тревоги в случае отсутствия полезного сигнала и низкая вероятность обнаружения при наличии сигнала, обусловленная низким отношением сигнал/шум, вследствие отсутствия процедуры компенсации шумовой составляющей на входе порогового устройства.
Известен радиоприемник с компенсацией помех (патент RU 2363014, G01S 7/36, 15.04.08 г.), в котором осуществляется компенсация взаимно коррелированных помех на основе использования различий в значениях взаимно корреляционных функций внутренних шумов приемника и преднамеренных помех в основном и дополнительном компенсационном каналах приема.
Недостатком радиоприемника является низкий уровень вероятности обнаружения сигнала, обусловленный низким отношением сигнал/шум, а при отсутствии сигнала высокий уровень ложных тревог вследствие того, что компенсация помех осуществляется только для случая наличия в канале приема взаимно коррелированных помех и при этом компенсационное напряжение пропорционально уровню помехи в дополнительном канале приема, а не в основном.
Известен радиоприемник с адаптивной компенсацией помех (Радиоприемные устройства: Учебник для вузов / Н.Н. Фомин, Н.Н. Буга, О.В. Головин и др.; под редакцией Н.Н. Фомина. - 3-е издание, стереотип. - М.: Горячая линия - Телеком, 2007. с. 410-411), в котором осуществляется компенсация помехового сигнала на основе использования дополнительного канала приема, сдвинутого по частоте относительно основного и включающего последовательно соединенные перестраиваемый фильтр и вычитающее устройство.
Недостатком данного радиоприемника является то, что уровень шума (помехи) в основном канале приема не учитывается, а это, в свою очередь, приводит к несоответствию уровня компенсационного напряжения истинному значению уровня шума (помехи) в основном канале приема, что приводит к снижению вероятности обнаружения сигнала из-за низкого отношения сигнал/шум, а при отсутствии сигнала к увеличению вероятности ложной тревоги.
Известен обнаружитель [Борисов В.И. и др. Пространственные и вероятностно-временные характеристики эффективности станций ответных помех при подавлении систем радиосвязи. / Под ред. В.И. Борисова. - М.: РадиоСофт, 2008. - рис. 2.9.3, с. 131.] сигналов со случайной амплитудой и начальной фазой в шумах неизвестной интенсивности с поддержанием постоянного уровня ложных тревог (ПУЛТ) и принятием решения по критерию Неймана-Пирсона.
Недостатком обнаружителя сигналов со случайной амплитудой и начальной фазой в шумах неизвестной интенсивности является не соответствие уровня порога обнаружения реально сложившейся помехово-сигнальной обстановке, а, следовательно, требуемые значения вероятностей обнаружения и ложной тревоги не обеспечиваются. Это обусловлено тем, что измерение дисперсии шума в обнаружителе осуществляется при условии отсутствия сигнала в канале обнаружения и при изменении интенсивности шума (помех) на входе приемника результат измерения будет не верен.
Наиболее близким по технической сущности к заявляемому решению является обнаружитель [Борисов В.И. и др. Пространственные и вероятностно-временные характеристики эффективности станций ответных помех при подавлении систем радиосвязи. / Под ред. В.И.Борисова. - М.: РадиоСофт, 2008. - рис. 2.6.1, с. 87] сигналов в шумах неизвестной интенсивности с поддержанием постоянного уровня ложных тревог (ПУЛТ) и принятием решения по критерию Неймана-Пирсона, содержащий процессор быстрого преобразования Фурье (БПФ), М параллельных каналов некогерентной обработки, каждый из которых включает параллельно соединенные схемы косинусного и синусного преобразования (квадратурного преобразования сигнала), первый и второй квадратор и сумматор, при этом, входы схем косинусного и синусного преобразования объединены и являются входом канала некогерентной обработки, при этом выход схемы косинусного преобразования соединен с входом первого квадратора, а выход схемы синусного преобразования соединен с входом второго квадратора, при этом выходы первого и второго квадратора соединены с первым и вторым входами сумматора соответственно, выход которого является выходом канала обработки, при этом выход каждого из М каналов является соответствующим входом М-канальной схемы выбора максимума (СВМ) и М-канального накопителя, выход которого соединен с первым входом второго перемножителя, второй вход которого соединен с выходом регистра хранения коэффициента усреднения 1/М, а выход второго перемножителя соединен с первым входом первого перемножителя, второй вход которого соединен с выходом регистра хранения значения функции, определяющей уровень порога обнаружения в соответствии с требуемым значением вероятности ложной тревоги и измеренным значением средней дисперсии шума, при этом выход первого перемножителя соединен со вторым входом схемы сравнения, первый вход которой соединен со вторым выходом СВМ, первый выход которой соединен с первым входом электронного ключа, второй вход которого соединен с первым выходом схемы сравнения, который является выходом обнаружителя.
Недостатком такого обнаружителя является то, что ПУЛТ обеспечивается только за счет измерения дисперсии внутреннего шума приемника и обнаружителя. Это означает что, в случае изменения интенсивности шума (помех) на входе приемника, заданный уровень порога обнаружения не будет соответствовать реально сложившейся помехово-сигнальной обстановке и не будет обеспечивать требуемые значения вероятностей обнаружения и ложной тревоги.
Техническим результатом изобретения является повышение чувствительности цифрового обнаружителя панорамного приемника сигналов со случайной амплитудой и начальной фазой в условиях шума с неизвестной интенсивностью с ПУЛТ на основе уменьшения порогового отношения сигнал/шум на входе, определяющего его чувствительность при заданных значениях вероятности обнаружения и ложной тревоги, за счет реализации цифрового метода измерения средней дисперсии шума в канале обнаружения сигнала и ее компенсации путем алгоритмического вычитания на входе порогового блока. Это соответствует увеличению дальности обнаружения источника радиоизлучения (ИРИ) при наличии сигнала ИРИ, и обеспечивает сокращение времени анализа радиоэлектронной обстановки в заданной анализируемой полосе частот для априори неизвестной загруженности полосы частот ИРИ, а также обеспечение ПУЛТ в соответствии с заданными вероятностями обнаружения и ложной тревоги в случае отсутствия сигнала ИРИ.
Технический результат достигается тем, что в известном цифровом оценочно-корреляционном компенсационном обнаружителе, содержащем процессор БПФ, имеющий М выходов, М каналов квадратурной обработки, каждый из которых состоит из схем косинусного и синусного преобразования, первого и второго квадратора, сумматора, при этом, входы схем косинусного и синусного преобразования объединены и соединены с соответствующими выходами процессора БПФ, схему выбора максимума (СВМ), имеющую М входов, при этом вход и выход m-го канала квадратурной обработки, где 
Сущность изобретения заключается в том, что дополнительно введенный в каждый частотный канал обнаружителя канал когерентной обработки сигналов и третья схема вычитания, позволяют производить в масштабе времени близком к реальному одновременное раздельное измерение средней дисперсии совокупных помех в канале обнаружения независимо от наличия в нем сигнала, и средней мощности сигнала. Это позволяет: во-первых, алгоритмически путем вычитания осуществлять компенсацию измеренного значения средней дисперсии совокупных помех и, тем самым, при отсутствии сигнала уменьшить уровень ложных тревог, а при его наличии уменьшить пороговое отношение сигнал/шум на входе цифрового обнаружителя панорамного приемника, определяющего его чувствительность при заданных значениях вероятности обнаружения и ложной тревоги; во-вторых осуществлять адаптивное изменение уровня порога обнаружения, в соответствии с реально сложившейся помехово-сигнальной обстановкой и заданными по критерию Неймана-Пирсона значениями вероятностей ложной тревоги и обнаружения и, тем самым, обеспечить постоянный уровень ложных тревог на выходе обнаружителя с учетом компенсации уровня помехи.
На фиг. 1 представлена функциональная схема цифрового оценочно-корреляционного компенсационного обнаружителя, где введены следующие обозначения:
1 - процессор БПФ;
2 - схема косинусного преобразования;
3 - схема синусного преобразования;
4 - ЦЛЗ;
5 - первый перемножитель;
6 - первый квадратор;
7 - второй квадратор;
8 - накопитель;
9 - сумматор;
10 - второй перемножитель;
11 - регистр хранения коэффициента усреднения 1/Н;
12 - первая схема вычитания;
13 - вторая схема вычитания;
14-СВМ;
15 - накопитель, имеющий М входов;
16 - электронный ключ;
17 - схема сравнения;
18 - третья схема вычитания;
19 - третий перемножитель;
20 - четвертый перемножитель;
21 - регистр хранения коэффициента усреднения 1/М;
22 - регистр хранения значения функции, определяющей уровень порога обнаружения.
Заявляемое устройство содержит процессор БПФ 1, имеющий М выходов, М каналов квадратурной обработки, каждый из которых состоит из схем косинусного 2 и синусного 3 преобразования, первого 6 и второго 7 квадратора, сумматора 9, при этом, входы схем косинусного 2 и синусного 3 преобразования объединены и соединены с соответствующими выходами процессора БПФ 1, СВМ 14, имеющую М входов, при этом вход и выход m-го канала квадратурной обработки, где 
ЦЛЗ 4 предназначена для временной задержки в каждом из М каналов действительной части X1(k)=ReX(k), где k - аргумент БПФ в спектральной области, совокупности отсчетов аддитивной смеси сигнала s(t) и шума (помех) n(t) с выхода схемы косинусного преобразования 2 на длительность большую времени корреляции шумовой составляющей.
Первый перемножитель 5 предназначен для перемножения действительной части X1(k)r=ReX(k)r совокупности спектральных отсчетов, взятой в r-й момент времени, со своей копией X1(k)r+i=ReX(k)r+i сдвинутой во времени, где r - аргумент БПФ во временной области, i временной сдвиг отсчетов соответственно.
Накопитель 8 предназначен для накопления значений произведения X3(k)=X1(k)rX1(k)r+I.
Второй перемножитель 10 предназначен для умножения накопленной в накопителе 8 суммы произведений X3(k)=X1(k)rX1(k)r+i с коэффициентом усреднения 
Регистр хранения 11 предназначен для хранения коэффициента усреднения 
Первая схема вычитания 12 предназначена для вычитания из оценки мощности 


Вторая схема вычитания 13 предназначена для вычитания из оценки мощности


Третья схема вычитания 18 предназначена для вычитания из вычисленного значения уровня порога обнаружения на выходе третьего перемножителя 19 оценки мощности 
Заявляемое устройство работает следующим образом.
На вход процессора БПФ 1 поступает совокупность L временных отсчетов Хi(t) аддитивной смеси сигнала s(t) и шума (помехи) n(t). В процессоре БПФ 1 осуществляется преобразование совокупности L временных отсчетов Xi(t) аддитивной смеси сигнала и шума по алгоритму БПФ. Таким образом, на выходе каждого из М частотных каналов процессора БПФ 1 формируется совокупность отсчетов 





С выхода схемы косинусного преобразования 2 в каждом из М каналов некогерентной обработки действительная часть Х1(k)=ReX(k) совокупности отсчетов аддитивной смеси сигнала s(t) и шума (помех) n(t) поступает на вход каждого из М дополнительных каналов когерентной обработки на первый и второй входы первого перемножителя 5, причем на его второй вход через ЦЛЗ 4 с временем задержки большим времени корреляции шумовой составляющей, определяемым следующей формулой:
где ƒдискр=2Δƒс - частота дискретизации входного сигнала, определяемая в соответствии с теоремой Котельникова шириной спектра сигнала 2Δƒс.
Таким образом, в первом перемножителе 5 осуществляется перемножение действительной части X1(k)r=ReX(k)r совокупности спектральных отсчетов, взятой в r-й момент времени, со своей копией X1(k)r+i=ReX(k)r+i сдвинутой во времени X3(k)=X1(k)rX1(k)r+i. С выхода перемножителя 5 произведение X3(k)=X1(k)rX1(k)r+i поступает на вход накопителя 8, где осуществляется накопление 

Таким образом, на выходе каждого дополнительного канала когерентной обработки (выход перемножителя 10) формируется оценка автокорреляционной функции 
С выхода каждого из М каналов некогерентной (выход сумматора 9) и когерентной обработки (выход перемножителя 10) значения оценок мощности


С выхода каждого из М каналов некогерентной обработки сигнала (выход сумматора 9) и выхода первой схемы вычитания 12 значения оценок мощности



С выхода каждой из М вторых схем вычитания 13 в каждом канале обработки значение оценки средней мощности 




С выхода четвертого перемножителя 20 значение средней по анализируемой полосе частот мощности шумовой (помеховой) составляющей 
Таким образом, с выхода третьего перемножителя 19 значение уровня порога обнаружения, определяемого заданной по критерию Неймана-Пирсона вероятностью ложной тревоги РЛТ и измеренным значением средней по анализируемой полосе частот мощности шумовой (помеховой) составляющей


Регистр 11 хранения коэффициента усреднения 1/Н, регистр 19 хранения коэффициента усреднения 1/М, регистр 20 хранения значения функции, определяющей уровень порога обнаружения, могут быть реализованы на базе микроконтроллера типа ATMEGA 8515 компании ATMEL.
Электронный ключ 15 может быть выполнен на основе известных практических схем электронных ключей (приведенных, например, в кн. Применение прецизионных аналоговых микросхем / А.Г. Алексеенко, Е.А. Коломбет, Г.И. Стародуб. - Второе изд., перераб. И доп. - М.: Радио и связь, 1985, с. 205-208).
Заявляемое устройство позволяет:
во-первых, обеспечить за счет реализации в каждом канале обработки, в процессе обнаружения сигнала обнаружителем, измерения средней мощности совокупных помех (шума) с последующей ее компенсацией на входе схемы сравнения, что приводит к уменьшению вероятности ложной тревоги на его выходе и, как следствие, к сокращению времени анализа радиоэлектронной обстановки;
во-вторых, при заданных одинаковых требованиях к значениям вероятности ложной тревоги и обнаружения сигнала, в отличие от прототипа, позволяет за счет компенсации измеренного значения средней мощности совокупных помех (шума) на входе схемы сравнения снизить уровень порога обнаружения (порогового напряжения), а, следовательно, позволяет уменьшить пороговое отношение сигнал/шум, определяющее чувствительность приемника по обнаружению, и, как следствие, к увеличению дальности обнаружения сигналов радиоэлектронных средств;
в-третьих, обеспечить постоянство заданного значения вероятности ложной тревоги РЛТ независимо от изменения спектральной плотности шума на входе обнаружителя за счет введения в каждом канале дополнительного канала когерентной обработки, позволяющего реализовать измерение средней мощности шумовой составляющей в каждом канале независимо от наличия в нем сигнала.
Таким образом, совокупность введенных блоков и связей между ними позволяет обеспечить увеличение дальности обнаружения сигналов на основе уменьшения порогового отношения сигнал/шум, определяющего чувствительность приемника; сократить время анализа радиоэлектронной обстановки за счет уменьшения вероятности ложной тревоги при компенсации измеренного значения средней мощности совокупных помех (шума) на входе схемы сравнения и обеспечить постоянство заданного значения вероятности ложной тревоги РЛТ и вероятности обнаружения сигнала, разведываемого источника радиоизлучения, за счет адаптивного изменения уровня порога обнаружения на основе измерения и компенсации средней мощности шума и/или помехи в каждом частотном канале обработки, что отсутствовало в прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ОБНАРУЖИТЕЛЬ РАДИОСИГНАЛОВ В УСЛОВИЯХ ШУМА НЕИЗВЕСТНОЙ ИНТЕНСИВНОСТИ | 2014 |
|
RU2563889C1 |
| ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛА | 2013 |
|
RU2537849C1 |
| Адаптивный двухпороговый обнаружитель сигналов ИРИ, размещенных на подвижных носителях | 2024 |
|
RU2822921C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| АДАПТИВНЫЙ ДВУХПОРОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ ЦИФРОВОГО ПАНОРАМНОГО ПРИЕМНИКА МОДУЛЬНОГО ТИПА | 2013 |
|
RU2524551C1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| Обнаружитель сигналов управления беспилотного летательного аппарата с акустическим каналом пеленгования | 2024 |
|
RU2836857C1 |
| Обнаружитель сигналов | 1980 |
|
SU907487A1 |
| Адаптивный ранговый обнаружитель | 1975 |
|
SU566218A1 |
Изобретение относится к радиотехнике и может быть в радиотехнических устройствах для обнаружения источников радиоизлучения (ИРИ) в условиях шума неизвестной интенсивности. Техническим результатом изобретения является повышение чувствительности цифрового обнаружителя панорамного приемника сигналов со случайной амплитудой и начальной фазой в условиях шума с неизвестной интенсивностью с постоянным уровнем ложных тревог (ПУЛТ) на основе уменьшения порогового отношения сигнал/шум на входе, определяющего его чувствительность при заданных значениях вероятности обнаружения и ложной тревоги. Это соответствует увеличению дальности обнаружения ИРИ при наличии сигнала ИРИ, и обеспечивает сокращение времени анализа радиоэлектронной обстановки в заданной анализируемой полосе частот для априори неизвестной загруженности полосы частот ИРИ, а также обеспечение ПУЛТ в соответствии с заданными вероятностями обнаружения и ложной тревоги в случае отсутствия сигнала ИРИ. В цифровом оценочно-корреляционном компенсационном обнаружителе реализуется цифровой метод измерения средней дисперсии шума в канале обнаружения сигнала и ее компенсации путем алгоритмического вычитания на входе порогового блока. Компенсационный обнаружитель содержит процессор БПФ (1); схему косинусного преобразования (2); схему синусного преобразования (3); цифровую линию задержки (4); первый перемножитель (5); первый квадратор (6); второй квадратор (7); накопитель (8); сумматор (9); второй перемножитель (10); регистр хранения коэффициента усреднения 1/Н (11); первую схему вычитания (12); вторую схему вычитания (13); схему выбора максимума (14); накопитель, имеющий М входов (15); электронный ключ (16); схему сравнения (17); третью схема вычитания (18); третий перемножитель (19); четвертый перемножитель (20); регистр хранения коэффициента усреднения 1/М (21); регистр хранения значения функции, определяющей уровень порога обнаружения (22). 1 ил.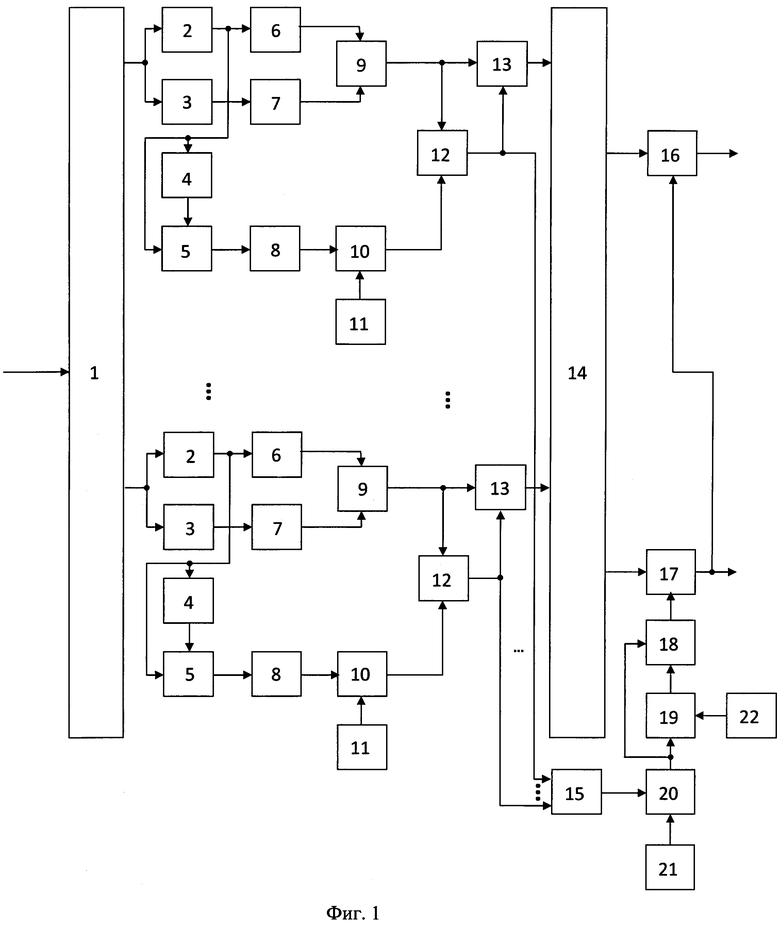
Цифровой оценочно-корреляционный компенсационный обнаружитель, содержащий процессор БПФ, имеющий М выходов, М каналов квадратурной обработки, каждый из которых состоит из схем косинусного и синусного преобразования, первого и второго квадратора, сумматора, при этом входы схем косинусного и синусного преобразования объединены и соединены с соответствующими выходами процессора БПФ, схему выбора максимума (СВМ), имеющую М входов, при этом вход и выход m-го канала квадратурной обработки, где  , соединены соответственно с соответствующими выходами процессора БПФ и входами СВМ, последовательно соединенные регистр хранения коэффициента усреднения 1/М, четвертый перемножитель, третий перемножитель, схема сравнения и электронный ключ, а также накопитель, имеющий М входов, выход которого соединен с вторым входом четвертого перемножителя, регистр хранения значения функции, определяющей уровень порога обнаружения, выход которого соединен с вторым входом третьего перемножителя, вторые входы электронного ключа и схемы сравнения соединены соответственно с первым и вторым выходом СВМ, а выходы электронного ключа и схемы сравнения являются выходами устройства, отличающийся тем, что дополнительно введены М каналов когерентной обработки сигнала, каждый из которых содержит последовательно соединенные цифровую линию задержки (ЦЛЗ), первый перемножитель, накопитель, второй перемножитель, первую и вторую схемы вычитания, а также регистр хранения коэффициента усреднения 1/Н, выход которого соединен с вторым входом второго перемножителя, объединенные вторые входы первой и второй схем вычитания m-го канала когерентной обработки соединены с выходом сумматора соответствующего канала квадратурной обработки, при этом выход первой схемы вычитания соединен - с соответствующим входом накопителя, имеющего М входов, а выход второй схемы вычитания - с соответствующим входом СВМ, при этом вход ЦЛЗ m-го канала когерентной обработки объединен со вторым входом первого перемножителя и соединен с выходом схемы косинусного преобразования соответствующего канала квадратурной обработки, третья схема вычитания, первый вход которой соединен с выходом третьего перемножителя, второй вход - с выходом четвертого перемножителя, а выход - с первым входом схемы сравнения.
, соединены соответственно с соответствующими выходами процессора БПФ и входами СВМ, последовательно соединенные регистр хранения коэффициента усреднения 1/М, четвертый перемножитель, третий перемножитель, схема сравнения и электронный ключ, а также накопитель, имеющий М входов, выход которого соединен с вторым входом четвертого перемножителя, регистр хранения значения функции, определяющей уровень порога обнаружения, выход которого соединен с вторым входом третьего перемножителя, вторые входы электронного ключа и схемы сравнения соединены соответственно с первым и вторым выходом СВМ, а выходы электронного ключа и схемы сравнения являются выходами устройства, отличающийся тем, что дополнительно введены М каналов когерентной обработки сигнала, каждый из которых содержит последовательно соединенные цифровую линию задержки (ЦЛЗ), первый перемножитель, накопитель, второй перемножитель, первую и вторую схемы вычитания, а также регистр хранения коэффициента усреднения 1/Н, выход которого соединен с вторым входом второго перемножителя, объединенные вторые входы первой и второй схем вычитания m-го канала когерентной обработки соединены с выходом сумматора соответствующего канала квадратурной обработки, при этом выход первой схемы вычитания соединен - с соответствующим входом накопителя, имеющего М входов, а выход второй схемы вычитания - с соответствующим входом СВМ, при этом вход ЦЛЗ m-го канала когерентной обработки объединен со вторым входом первого перемножителя и соединен с выходом схемы косинусного преобразования соответствующего канала квадратурной обработки, третья схема вычитания, первый вход которой соединен с выходом третьего перемножителя, второй вход - с выходом четвертого перемножителя, а выход - с первым входом схемы сравнения.
| БОРИСОВ В.И | |||
| и др | |||
| Пространственные и вероятностно-временные характеристики эффективности станций ответных помех при подавлении систем радиосвязи | |||
| / Под ред | |||
| В.И | |||
| БОРИСОВА., Москва.: РадиоСофт, 2008., с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 24721671 C1, 10.01.2013 | |||
| ДВУХПОРОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ ПАНОРАМНОГО ПРИЕМНИКА ПОСЛЕДОВАТЕЛЬНОГО АНАЛИЗА | 2006 |
|
RU2331083C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352063C1 |
| US 8270536 B2, 18.09.2012. | |||

