Изобретение относится к автоматическому управлению и регулированию на металлорежущих станках преимущественно токарной группы, встраиваемой в ГПС, и может быть использовано для построения системы регулирования процесса контроля с использованием нескольких измерителей (измерительных преобразователей) различной точности и затратам на измерение.
Известны системы регулирования процесса контроля на металлорежущем станке [1 и 2] которых происходит регулирование процесса контроля по данным текущих измерений детали и инструмента, например переход от косвенного к прямому методу измерения размерного износа инструмента и обратно.
Недостатком известных систем является то, что процедура регулирования происходит от цикла к циклу и не происходит непосредствено в процессе обработки детали.
Известны способы определения запаздывания измерения силы резания (возмущающего фактора) от изменения толщины среза, выходного параметра, соответствующего отклонению размера детали в поперечном сечении [3] Это отстаивание связано с инерционностью процесса резания, что определяет несоответствие в реальном масштабе времени показаний измерителей не только различного типа, но и измеряющих параметры динамической системы станка в разных его точках.
Эти способы не используют статистические зависимости между входными и выходными факторами регрессионной модели.
Наиболее близким по технической сущности к заявляемому адаптивной системе является выбранная за прототип адаптивная система регулирования процесса контроля [4] содержащая последовательно соединенные первый измеритель, второй сумматор, третий масштабирующий блок, переключатель, выход которого является выходом системы, последовательно соединенные второй измеритель, третий блок сравнения, второй вход которого поключен к выходу первого измерителя, фильтр низкой частоты, дифференциатор, втрой блок определения модуля, второй блко сравнения, второй вход которого сооединен с выходом второго задатчика, масштабирующий блок, второй блок памяти, арифметический блок, экстраполятор, первый сумматор, второй вход которого подключен к входу второго блока памяти, а выход к одному из входов третьего блока памяти, другой вход которого подключен к второму входу второго блока памяти и к выходу второго блока задержки, последовательно соединенные первый блок определения модуля, первый компаратор, таймер, второй компаратор, первый ключ, первый блок задержки, выход которого подключен к третьему входу переключателя, к второму входу которого подключена последовательно соединенная цепь из второго ключа и третьего измерителя, последовательно соединенные первый задатчик, первый блок сравнения, первый блок памяти и второй масштабирующий блок, выход которого подключен к входу арифметического блока, другой вход которго подключен к второму входу первого ключа, при этом вход второго ключа связан с выходом первого ключа, входы первого и второго измерителей соединены и являются входами устройства, выход второго измерителя соединен с входами сумматра и третьего блока сравнения, а выход первого ключа связан с входом первого блока задержки.
Известная система регулирует процесс контроля, обеспечивая заданную точность измерения и поддерживая затраты на процедуру измерения на минимально возможном уровне, используя для этого два менее точных и менее дорогих измерителя и один более точный и соответственно требующий больших затрат на измерение измеритель.
Однако в известной системе не учитывается влияние статистической взаимосвязи между измерителями, если они контролируют технологический процесс различными способами (например, если первые два измерителя осуществляют косвенный способ измерения, а третий более точный прямой, но требующий существенных затрат, способ измерения). В известной системе не учитывается также возможный дискретный характер управления самим технологическим процессом, а также возможный дискретный способ получения и обработки измерительной информации (например, использование стробоскопического эффекта для систем технического зрения). Использование только детерминированной модели технологического процесса может не дает положительного результата для нестационарного процесса, где параметры регрессионной модели оценивания выходного показателя качества могут изменяться. Этого можно избежать, введя устройство идентификации и "отслеживая" параметры модели для обоеспечения минимума ошибки между прямым и косвенным способами измерения.
Целью изобретения является повышение точности регулирования процесса контроля и расширение функциональных возможностей.
Цель достигается тем, что адаптивная система регулирования процесса контроля на металлорежущем станке, содержащая три измерителя, по три блока памяти, блока сравнения и масштабирующего блока, по два задатчика, сумматора, блока задержки, блока определения модуля, компаратора, ключа, арифметический блок, экстраполятор, дифференциатор, фильтр низких частот, таймер и переключатель, выход которого соединен с выходом системы, причем выход первого задатчика соедиен с первым входом первого блока сравнения и с вторым входом первого компаратора, выход второго задатчика с первым входом второго блока сравнения, выход первого масштабирующего блока с первым входом первого сумматора, выход первого блока памяти с входом второго масштабирующего блока, выход третьего блока сравнения с входом фильтра низких частот, выход которого соединен с вторым входом первого блока сравнения, через первый блок оопределения модуля с первым входом первого компаратора, а через последовательно включенные дифференциатр, второй блок определения модуля, второй блок сравнения, первый масштабирующий блок, втрой блок памяти, арифметический блок, экстраполятор, первый сумматор, третий блок памяти с первым входом второго компаратора, выход третьего блока памяти подключен также к второму входу арифметического блока, выход первого ключа связан с первым входом второго ключа и с первым входом первого блока задержки, выход вторго ключа через третий измеритель соединен с вторым входом переключателя, выход первого компаратра соединен с входом второго блока задержки, с вторым входом первого блока задержки, с первым входом первого ключа и через таймер с вторым входом второго компаратора, выход которого связан с вторым входом первого ключа, выход второго блока задержки соединен с первым входом третьего блока памяти и вторым входом второго блока памяти, выход первого блока сравнения подключен к первому входу первого блока памяти, выход второго масштабирующего блока к третьему входу арифметического блока, вход системы соединен с первым входом второго ключа и с входами первого и второго измерителей, выходы которых подключены к входу третьего блока сравнения и через последовательно соединенные третий масштабирующий блок и второй сумматор к первому входу переключателя, выход третьего масштабирующего блока связан с первым входом третьего блока сравнения, дополнительно оснащена дисперсиометром, идентификатором, вторым и третьим экстраполяторами, третьим и четвертым задатчиками, третьим компаратором, третьим и четвертым ключами, четвертым блоком сравнения, четвертым масштабирующим блоком и четвертым блоком памяти, причем входы второго и третьего экстраполяторов соединены соответственно с выходами первого и второго измерителей, выход второго экстраполятора связан с первыми входами третьего масштабирующего блока и идентификатора, выход третьего экстраполятора с первым входом четвертого масштабирующего блока и вторым входом идентификатора, третий вход которого подключен к входу третьего измерителя, а его первый и второй выходы к вторым входам третьего и четвертого масштабирующих блоков, выход четвертого масшабирующего блока соединен с вторыми входами второго сумматора и третьего блока сравнения, выход второго сумматора подключен к первому входу блока сравнения, второй вход которого связан с выходом третьего измерителя а его выход с входом дисперсиометра, выход дисперсиометра соединен с первым входом третьего компаратора, второй вход которого связан с выходом третьего задатчика, а его выход с входом четвертого блока памяти, выход четвертого блока памяти соединен с первыми входами третьего и четвертого ключей, второй вход третьего ключа соединен с выходом первого ключа, а его выход с вторым входом второго ключа, второй вход четвертого ключа соединен с выходом первого блока задержки, а его выход с третьим входом переключателя и вторым входом первого блока памяти, четвертый вход арифметического блока соединен с выходом четвертого задатчика.
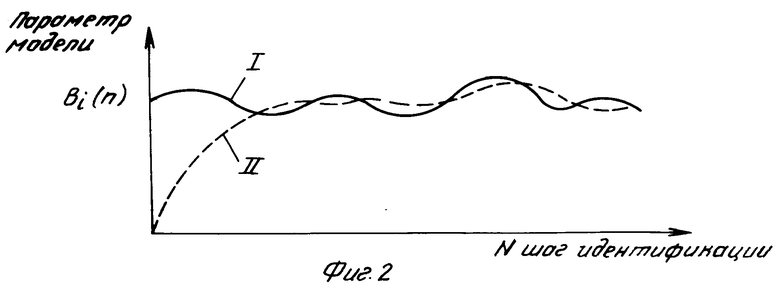
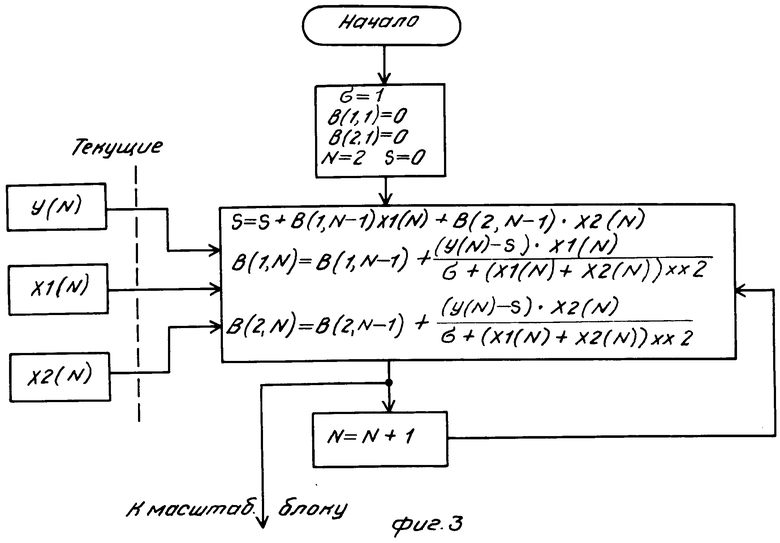
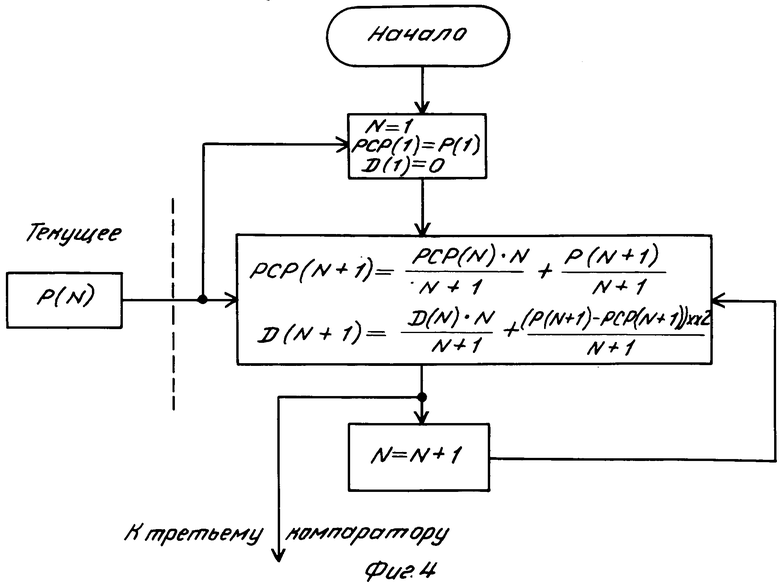
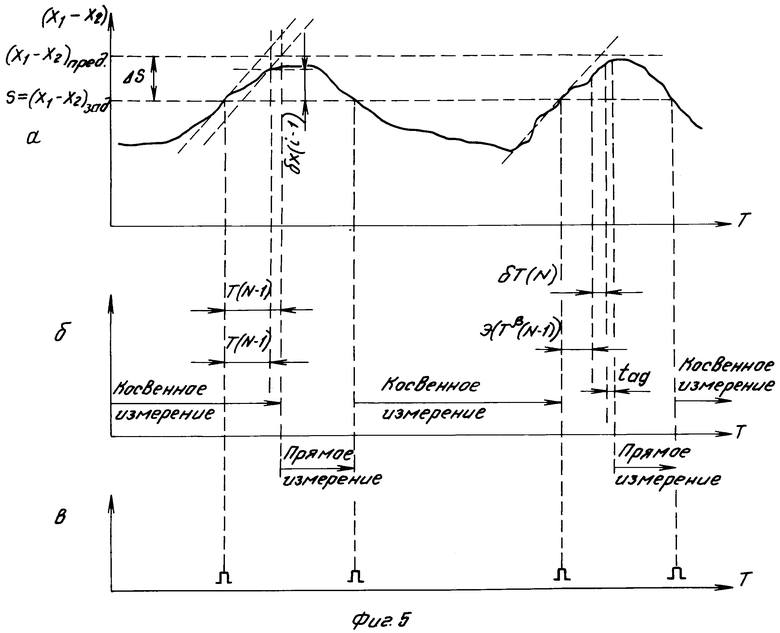
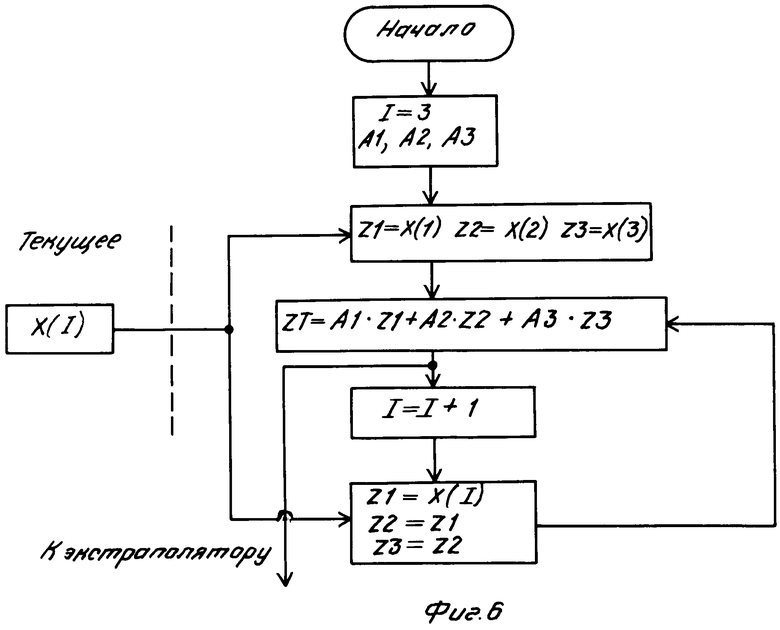
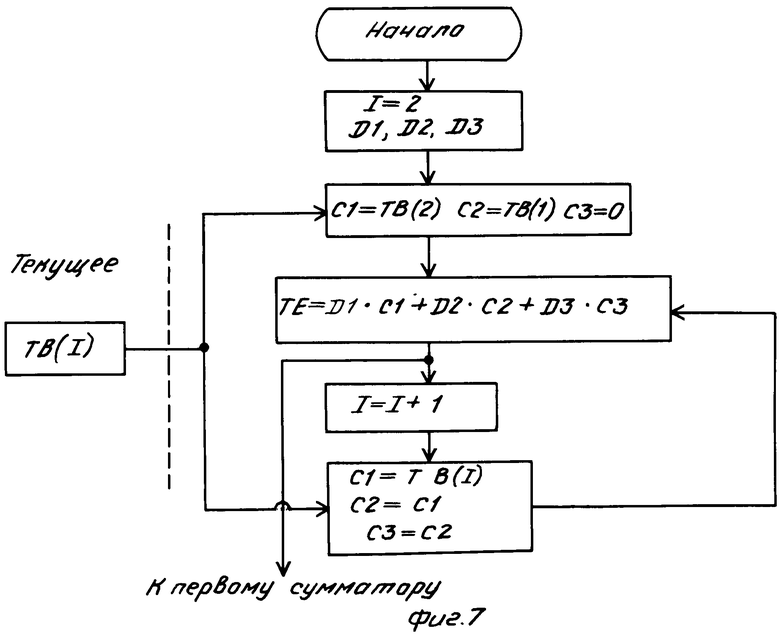
На фиг. 1 представлена блок-схема адаптивной системы регулирования процесса контроля на металлорежущем станке; на фиг. 2 показан график процесса идентификации весовых коэффициентов модели, входящих в масштабирующие блоки, где I истинные, а II "отслеживаемые" идентифицируемые параметры модели; на фиг. 3 и 4 представлены алгоритмы идентификатра и дисперсиометра сооответственно; на фиг. 5 график изменения разности масштабированных сигналов измерителей от времени (а), временная диаграмма изменения данного сигнала (б), диаграмма управляющих импульсов на первом компараторе (в); на фиг. 6 и 7 алгоритмы функционирования первого и втрого экстраполяторов соответственно.
Система содержит первый 1, второй 2 и третий 3 измерители, первый 4, второй 5, третий 6 и четвертый 7 блоки памяти, первый 8, второй 9, третий 10 и четвертый 11 блоки сравнения, первый 12, второй 13, третий 14 и четвертый 15 масштабирующие блоки, первый 16, второй 17 и третий 18 задатчики, первый 19 и второй 20 сумматоры, первый 21 и второй 22 блоки задержки, первый 23 и второй 24 блоки определения модуля, первый 25, второй 26 и третий 27 компараторы, первый 28, второй 29, третий 30 и четвертый 31 ключи, арифметический блок 32, первый 33, второй 34 и третий 35 экстраполяторы, дифференциатор 36, фильтр 37 низких частот, таймер 38, переключатель 39, идентификатор 40, дисперсиометр 41, четвертый задатчик 42. Выход переключателя 39 соединен с выходом системы. Выход первого задатчика 16 соединен с первым входом первого блока 8 сравнения и в с вторым входом первого компаратора 25, а выход второго задатчика 17 с первым входом второго блока 9 сравнения. Выход первого масштабирующего блока 12 соединен с первым входом первого сумматора 19, выход первого блока 4 памяти с входом второго масштабирующего блока 13, выход третьего блока 10 сравнения с входом фильтра 37 низких частот, выход которого соединен с вторым входом первого блока 8 сравнения, через первый блок 23 определения модуля с первым входом первого компаратора 25, а через последовательно включенные дифференциатор 36, второй блок 24 определения модуля, второй блок 9 сравнения, первый масштабирующий блок 12, второй блок 5 памяти, арифметический блок 32, первый экстраполятор 33, первый сумматор 19, третий блок 6 памяти с первым входом второго компаратора 26. Выход третьего блока 6 памяти подключен также к второму входу арифметического блока 32. Выход первого ключа 28 связан с первым входом второго ключа 29 и с первым входом первого блока 21 задержки, выход второго ключа 29 через третий измеритель 3 соединен с вторым входом переключателя 39. Выход первого компаратора 25 сооединен с входом второго блока 22 задержки, с вторым входом первого блока 21, с первым входом первого ключа 28 и через таймер 38 с вторым входом второго компаратора 26, выход которого связан с вторым входом первого ключа 28. Выход второго блока 22 задержки соединен с первым входом третьего блока 6 памяти и вторым входом второго блока 5 памяти. Выход первого блока 8 сравнения подключен к первому входу первого блока 4 памяти, выход второго масштабирующего блока 13 к третьему входу арифметического блока 32. Вход системы соединен с первым входом второго ключа 29 и с выходами первого 1 и второго 2 измерителей, выходы которых соединены соответственно с входами второго 34 и третьего 35 экстраполяторов. Выход второго экстраполятора 34 связан с первыми входами третьего масштабирующего блока 14 и идентификатора 40, а выход третьего экстраполятора 35 с первым входом четвертого масштабирующего блока 15 и вторым входом идентификатора 40, третий вход которого подключен к входу третьего измерителя 3, а его первый и второй выходы к вторым входам третьего 14 и четвертого 15 масштабирующих блоков. Выход четвертого масштабирующего блока 15 соединен с вторыми входами второго сумматра 20 и третьего блока 10 сравнения. Выход второго сумматора 20 подключен к первому входу четвертого блока 11 сравнения, второй вход которого связан с выходом третьего измерителя 3, а выход с входом дисперсиометра 41. Выход дисперсиометра 41 соединен с первым входом третьего компаратора 27, второй вход которого связан с выходом третьего задатчика 18, а выход с входом четвертого блока 7 памяти. Выход четвертого блока 7 памяти соединен с первыми входами третьего 30 и четвертого 31 ключей. Второй вход третьего ключа 30 соединен с выходом первого ключа 28, а выход с вторым входом второго ключа 29. Второй вход четвертого ключа 31 соединен с выходом первого блока 21 задержки, а выход с третьим входом переключателя 39 и вторым входом первого блока 4 памяти. Четвертый вход арифметического блока 32 связан с выходом четвертого задатчика 42.
В предлагаемой адаптивной системе регулирования процесса контроля на металлорежущем станке в процессе резания производится контроль одного из выбранных параметров, например диаметра обрабатываемой детали, толщины фактически удаляемого слоя и др. При этом данный параметр контролируется и прямым, и несколькими косвенными методами. Применение прямого метода измерения трудоемко, технически трудно реализуемо, но обеспечивает более достоверной информацией об изменении аттестуемого параметра, в противоположность чему использование косвенных методов измерения, более простых и доступных, не требует значительных затрат на реализацию, но приводит к снижению достоверности измерительной информации. Наличие в составе предлагаемой адаптивной системы дополнительных функциональных блоков решает задачу повышения точности регулирвания процесса контроля и расширяет ее функциональные возможности за счет более полного и рациональнго использования имеющихся измерителей.
Рассматривается объект, описываемый следующим уравнением в дискретные моменты времени:
y(N) hi(N)·xi(N) где Y(N) выход объекта в N-м такте;
hi(N)·xi(N) где Y(N) выход объекта в N-м такте;
Хi(N) значения i-го входа в N-м такте;
hi(N) неизвестные параметры объекта;
n число входов.
Модель объекта имеется в следующем виде:
y*(N) Bi(N-1)xi(N) где Y*(N) оценка выхода объекта, полученная по модели;
Bi(N-1)xi(N) где Y*(N) оценка выхода объекта, полученная по модели;
Bi(N-1) оценка i-го параметра объекта для (N-1)-го такта.
Выбрав произвольно начальные оценки Bi(O), производят уточнение их по итерационной формуле
Bi(N) Bi(N-1) +  · xi(N) где γ параметр "шума" (0 < γ < 2 ).
· xi(N) где γ параметр "шума" (0 < γ < 2 ).
Если входные и выходные переменные измеряются, "отслеживание" происходит в реальном времени. Величина, на которую исправляются коэффициенты модели, пропорциональна ошибке предсказания. Работо- способность (устойчивость и сходимость алгоритма) обеспечивается достаточно медленным изменением параметров модели (точность возмущающиеся факторы) образования погрешности на металлорежущем станке.
Адекватность регрессионной модели обеспечивается на этапе проектирования системы контроля путем выбора факторов, имеющих наибольшую статистическую зависимость с выходным параметрым регрессионной модели (модуль коэффициента парной корреляции не менее 0,6). На полученной выборке отклонений размерв деталей возмущающих факторов (сила резания, уровень вибрации, температура) проводится математическое моделирование и оценка параметров модели на адекватность.
Критерий нестационарности процесса, используемый в предлагаемом техническом решении, превышение дисперсии разности показаний третьего измерителя и суммы масштабированных сигналов первого и втрого измерительных преобразователей допустимого уровня.
На металлорежущем станке встраивание измерительных преобразователей может быть различным и по месту, и по выбору датчика. В связи с этим динамические процессы, происходящие при обработке детали регистрируются не одновременно с технологическим процессом, а с определенным запаздыванием. Если учитывать, что измерение отклонений размеров деталей в системе СТЗ происходит почти мгновенно, то измерение температурных и силовых деформаций происходит существенно позже зависит от дальности расположения датчика от зоны резания). Кроме того, время запаздывания определяется и скоростью работы соответствующего вычислительного алгоритма.
Это время запаздывания определяется на этапе проектирования системы контролоя путем постановки эксперимента: отклонения размерв возмущающие факторы (сила резания, вибрации, температура и др.) с одновременной регистрацией измеренных сигналов. Временная выборка разбивается с интервалом 10-4 и вводится в память микроЭВМ, после чего вычисляются парные коэффициенты корреляции отклонения размера возмущающий фактор по формуле
r  где yiv, xiv сигналы, поступающие с выходов измерителей. После этого определяется время запаздывания li, соответствующее максимальному значению коэффициента парной корреляции.
где yiv, xiv сигналы, поступающие с выходов измерителей. После этого определяется время запаздывания li, соответствующее максимальному значению коэффициента парной корреляции.
Экспериментально получено, что скорость изменения разности масштабированных сигналов измерительных преобразователей не является величиной постоянной (она достаточно медленно меняется во времени относительно базового значения), она зависит от времени работы металлорежущего станка и режимов его работы (припуска, скорости резания).
Приращение времени включения третьего измерителя вычисляется с учетом изменения сигнала о разности показаний первого и второго измерителей:
δTv(N) K -
-  где Φ обозначение фильтра;
где Φ обозначение фильтра; базовое значение скорости изменения разности масштабирванных сигналов измерителей;
базовое значение скорости изменения разности масштабирванных сигналов измерителей; производная (дискретная) по времени. Коэффициент К1 между приращением скорости изменения разности масштабируемых сигналов измерителей и приращением времени δTv относительно среднего определяется до работы системы. Коэффициент К1 близок к постоянному, задается перед началом работы системы.
производная (дискретная) по времени. Коэффициент К1 между приращением скорости изменения разности масштабируемых сигналов измерителей и приращением времени δTv относительно среднего определяется до работы системы. Коэффициент К1 близок к постоянному, задается перед началом работы системы.
В тот момент, когда сигнал о разности преобразованных сигналов измерителей достигнет заданного значения, вычисляется требуемое время включения третьего измерителя при предшествующем (N-1)-м включении, причем это время зависит и от приращения времени включения третьего измерителя (скорости изменения разности преобразованных сигналов) в предыдущем включении. Фактическое время включения определяется с определенной погрешностью, поэтому не происходит совпадения его с требуемым. Согласно фиг. 5 разница между требуемыми фактическим временем может бытиь определена путем нахождения скорости изменения разницы преобразованных сигналов измерителей.
Система работает следующим образом.
Выходные сигналы первого 1 (например, датчика виброакустических колебаний) и второго 2 (например, датчика силы резания) измерителей либо, например, тензодатчиков, наклеенных на разные штатные части станка, осуществляющих косвенный котроль измерителей, экстраполируются соответственно, вторым 34 и третьим 35 экстраполяторами на величины запаздывания, соответствующие максимальному значению коэффициента корреляции между величинами, измеряемыми первым 1 и вторым 2 измерителями, и величиной, измеряемой третьим измерителем прямого контроля (например, размером обработанной детали или толщиной фактически удаляемого слоя). Выходные сигналы второго 34 и третьего 35 экстраполяторов умножаются на весовые коэффициенты в третьем 14 и четвертом 15 масштабирующих блоках соответственно, после чего они суммируются во втором сумматоре 20, и сигнал о косвенно измеренной величине (например, размере обработанной детали или толщине фактически удаляемого слоя) подается на первый вход переключателя 39. Для обеспечения работоспособности системы предполагается адекватность регрессионной модели "возмущающие факторы выходные параметры качества" процесса обработки на металлорежущем станке.
Если отклонение преобразованных сигналов первого 1 и втрого 2 измерителей не превышает заданную величину, то на выходе системы имеют сигнал, пропорциональный среднему значению косвенно измеренной величины. Когда разность преобразованных показаний первого 1 и второго 2 измерителей приближается к предельному значению (т.е. когда погрешность измерения может превысить предельно допустимое значение), определяется требуемое время подключения третьего, более точного измерителя 3. Это время прогнозируется с учетом скорости изменения сигнала о разности преобразованных показаний первого 1 и второго 2 измерителей. По истечении прогнозируемого отрезка времени включается третий измеритель 3.
Таким образом, происходит регулирование процесса контроля, в результате чего обеспечивается заданная точность контроля, а затраты на измерение находятся на минимально возможном уровне.
Выходной сигнал третьего блока 10 сравнения о разности показаний масштабируемых сигналов измерителей поступает на фильтр 37 низких частот, где подавляется высокочастотная составляющая, и далее через первый блок 23 определения модуля на первый вход первого компаратора 25, на второй вход которого поступает сигнал с выхода первого задатчика 16 о заданном значении разности масштабированных сигналов измерителей. При превышении величиной модуля разности сигналов измерителей на выходе первого компаратора 25 появляется сигнал, по которому включается таймер 38, замыкается первый ключ 28 и в первом блоке 21 задержки устанавливается время, соответствующее времени адаптации третьего измерителя 3. Сигнал с выхода фильтра 37 низких частот поступает также на вход дифференциатора 36 и второй блок 24 определения модуля, где определяется скорость его изменения и берется модуль полученной скорости, из которого во втором блоке 9 сравнения вычитается поступающее из второго задатчика 17 базовое, в частности нулевое или среднее, значение скорости изменения разности масштабированых сигналов измерителей. Сигнал о полученном приращении пересчитывается в первом масштабирующем блоке 12 в приращение времени включения третьего измерителя 3 и подается на первый вход второго блока 5 памяти и первый вход первого сумматора 19.
Заполненое в третьем блоке 6 памяти значение фактического времени включения третьего измерителя 3, под которым принимается время от момента срабатывания первого компаратора 25 до момента подачи управляющего сигнала на переключатель 39, поступает на вход арифметического блока 32, где определяется требуемое время включения T  третьего измерителя при предшествующем его включении по выражению
третьего измерителя при предшествующем его включении по выражению
Tβ(N-1) T(N-1)+  где T
где T  (N-1) требуемое время включения третьего измерителя 3 при предшествующем (N-1)-м включении;
(N-1) требуемое время включения третьего измерителя 3 при предшествующем (N-1)-м включении;
Т(N-1) фактическое время включения третьего измерителя;
К1 коэффициент пересчета отклонения скорости изменения разности сигналов измерения от базового (задается до работы системы);
К коэффициент пересчета отклонения разности показаний первого и второго измерителей от заданного значения;
Δх величина (задатчик 42), соответствующая превышению предельно допустимого значения над заданным (первый задатчик 16, по которому начинается процесс регулирования), значением разницы преобразованых сигналов измерителей.
δх(N-1) превышение разности сигналов измерителей над заданным при (N-1)-м включении (блок 8 сравнения).
Сигнал о значении T  (N-1) экстраполируется первым экстраполятором 33 на текущий момент времени и в первом сумматоре 19 алгебраически суммируется с выходным сигналом первого масштабирующего блока 12. В результате на выходе первого сумматора 19 выделяется сигнал о времени предстоящего включения третьего измерителя 3. Значение этого сигнала запоминается в третьем блоке 6 памяти по сигналу с выхода второго блока 22 задержки, время задержки котрого соответствует времени проведения расчетов в арифметическом блоке 32, первом экстраполяторе 33 и первом сумматоре 19. Выходной сигнал третьего блока 6 памяти сравнивается во втором компараторе 26 с сигналом о текущем времени, поступающем с выхода таймера 38. При превышении значением текущего времени значения времени включения третьего измерителя 3 на выходе второго компаратора 26 появляется сигнал, который с помощью первого 28, третьего 30 и второго 29 ключей обеспечивает подключение питающего напряжения к третьему измерителю 3 и ввод его в работу. Выходной сигнал второго компаратора 26 через первый ключ 28 поступает также на первый вход первого блока 21 задержки, где задерживается на время адаптации третьего измерителя 3. По истечении этого времени сигнал поступает на третий вход переключателя 39, обеспечивая подключение выхода переключателя к второму входу. Таким образом, на выход системы поступает выходной сигнал третьего измерителя 3.
(N-1) экстраполируется первым экстраполятором 33 на текущий момент времени и в первом сумматоре 19 алгебраически суммируется с выходным сигналом первого масштабирующего блока 12. В результате на выходе первого сумматора 19 выделяется сигнал о времени предстоящего включения третьего измерителя 3. Значение этого сигнала запоминается в третьем блоке 6 памяти по сигналу с выхода второго блока 22 задержки, время задержки котрого соответствует времени проведения расчетов в арифметическом блоке 32, первом экстраполяторе 33 и первом сумматоре 19. Выходной сигнал третьего блока 6 памяти сравнивается во втором компараторе 26 с сигналом о текущем времени, поступающем с выхода таймера 38. При превышении значением текущего времени значения времени включения третьего измерителя 3 на выходе второго компаратора 26 появляется сигнал, который с помощью первого 28, третьего 30 и второго 29 ключей обеспечивает подключение питающего напряжения к третьему измерителю 3 и ввод его в работу. Выходной сигнал второго компаратора 26 через первый ключ 28 поступает также на первый вход первого блока 21 задержки, где задерживается на время адаптации третьего измерителя 3. По истечении этого времени сигнал поступает на третий вход переключателя 39, обеспечивая подключение выхода переключателя к второму входу. Таким образом, на выход системы поступает выходной сигнал третьего измерителя 3.
Одновременно с этим сигнал с третьего измерителя поступает на третий вход идентификатора 40, на первый и вторые входы которого поступают преобразованные сигналы с первого и второго измерителей. В идентификаторе 40 формируются масштабирующие (весовые) коэффициенты в соответствии с формулой
bi(n) bi(n-1) +  где bi(n) значение весового коэффициента в n-м шаге идетификации;
где bi(n) значение весового коэффициента в n-м шаге идетификации;
Y*(n) дискретное значение сигнала третьего измерителя 3;
γ параметр шума;
xi (n) дискретное значение сигналов первого (второго) измерителя (i 1, 2) (экстраполированное).
(n) дискретное значение сигналов первого (второго) измерителя (i 1, 2) (экстраполированное).
Полученные (адаптированные) в реальном масштабе времени весовые коэффициенты поступают на входы третьего 14 и четвертого 15 масштабирующих блоков, суммируются во втором сумматоре 20, определяя косвенно измеренную величину, после чего сравниваются в четвертом блоке 11 сравнения с сигналом от третьего измерителя 3 (происходит сопоставление сигналов об изменении измеряемой величины, определенной косвенными и прямыми методами). В дисперсиометре 41 находится дисперсия ошибок (погрешностей) измерений. Если величина погрешности измерения меньше заданной величины, то с третьего компаратора 27 подается разрешающий сигнал на третий 30 и четвертый 31 ключи.
В момент времени, когда выходной сигнал первого блока 23 определения модуля становится меньше сигнала первого задатчика 16, выходной сигнал первого компаратора 25 становится равным нулю. Тогда размыкается первый ключ 28 и в первом блоке 21 задержки устанавливается время задержки, равное нулю. В результате сигнал, пройдя через третий ключ 30, размыкает второй ключ 29, и обеспечивается отключение питающего напряжением от третьего измерителя 3 (возможно, например, закрытие объектива камеры системы технического времени СТЗ), переключатель 39 соединяет свой выход с первым входом и на выход системы поступает сигнал с второго сумматора 20.
Если наблюдается нестационарный процесс и не удается получить параметры адекватной модели (сигналов третьего 14 и четвертого 15 масштабирующих блоков), удовлетворяющие критерию минимума ошибки регрессионной модели, то третий компаратор 27 запрещает прохождение выключающего сигнала от первого ключа 28 через третий 30 на второй 29 ключи и от первого блока 21 задержки через четвертый ключ 31 к переключателю 39.
Если текущая величина дисперсии ошибок измерения оказывается меньше допустимого предела, то через четвертый блок 7 памяти на третий 30 и четвертый 31 ключи поступает разрешающий сигнал на выключение третьего измерителя 3 и на переключение переключателя 39, через который идет сигнал с второго сумматора 20.
Применение идентификатора позволяет осуществить адаптацию процесса контроля к изменяющимся условиям обработки на металлорежущем станке в случае, если производится контроль параметра процесса резания (например, диаметра контролируемой детали) различными способами измерения прямыми и косвенными.
Параметр К1 (величина, обратно пропорциональная среднему значению второй производной разницы преобразованных сигналов измерителей) задавался равным 0,1 с2/мкм. Экспериментально было установлено, что вторая производная меняется незначительно и может быть принята постояной.
Время адаптации третьего измерителя задается до работы сисремы (выбирается, например, из паспорта системы технического зрения). Второй и третий экстраполяторы могут быть выполнены в виде реального формирующего звена, а также в виде вычислительного блока, осуществляющего вычисление прогнозируемого значения текущего параметра по формуле
xi(N) a1i ˙ xiv(N-1) + a2i ˙ xiv(N- 2) +
+ а3i ˙ xiv(N-3)
i 1, 2, 3 где xiv(N) сигналы, поступающие в N-м шаге (такте) с выходов первого и второго измерителей;
аi коэффициенты, определяемые до работы системы, в нашем случае аi 0,5; а2 0,1; а3 -0,05 (см. фиг. 6).
Аналогично может быть выполнен первый экстраполятор в виде реального формирующего звена либо с помощью вычислительного блока, работающего по формуле (см. фиг. 7).
T  (N) d1T
(N) d1T  (N-1) + d2T
(N-1) + d2T  (N-2) +
(N-2) +
+ d3T  (N-3).
(N-3).
Экспериментально получено, что для повышения надежности работы системы целесообразно использовать заглубленные параметры экстраполятора d1 0,9; d2 0; d3 0.
Формула работы низкочастотного фильтра 37 может иметь вид текущего среднего: (N)
(N) 
 или по другим формулам, например, медианной фильтрации.
или по другим формулам, например, медианной фильтрации.
Формула работы дифференциатора может иметь следующий вид при работе в реальном времени:
 где h интервал дифференцирования, соответствующий времени такта работы системы, h 0,0001 с (тактовый генератор используется во всех трех измерителях);
где h интервал дифференцирования, соответствующий времени такта работы системы, h 0,0001 с (тактовый генератор используется во всех трех измерителях);
N номер такта.
В предлагаемой адаптивной системе контроля подключение измерителя, выполняющего прямые измерения, но требующего больших затрат на измерение, производится только в те моменты времени, когда предлагается большое отклонение между масштабируемыми показаниями менее точных измерителей, поэтому в предлагаемой системе достигнуто существенное повышение точности регулирования процесса контроля при незначительном повышении затрат на измерение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ СГУЩЕНИЯ | 1992 |
|
RU2084264C1 |
| Адаптивная система регулирования процесса контроля | 1985 |
|
SU1278808A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| РЕЛЕ ПЕРЕМЕННОГО ТОКА | 1994 |
|
RU2097892C1 |
| ИЗМЕРИТЕЛЬ МАЛЫХ СОПРОТИВЛЕНИЙ | 1996 |
|
RU2099722C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИГОТОВЛЕНИЕМ ОБЕСКРЕМНИВАЮЩЕГО РЕАГЕНТА | 1991 |
|
RU2080294C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ВКЛЮЧЕНИЯ ЭЛЕКТРИЧЕСКОГО АППАРАТА | 1994 |
|
RU2073785C1 |
Изобретение может быть использовано в системах автоматического управления и регулирования на металлорежущих станках преимущественно токарной группы и может быть использовано для построения системы регулирования процесса контроля с использованием нескольких измерителей различной точности. Цель изобретения повышение точности регулирования процесса контроля. В систему, содержащую три измерителя 1, 2, 3, по три блока 4, 5, 6 памяти, блока 8, 9, 10 сравнения, масштабирующих блоков 12, 13, 14, по два задатчика 16, 17, сумматора 19, 20, блока 21, 22 задержки, блока 23, 24 определения модуля, компаратора 25, 26, ключа 28, 29, арифметический блок 32, экстраполятор 23, дифференциатор 36, фильтр 37 низких частот, таймер 38 и переключатель 39, введены дисперсиометр 41, идентификатор 40, второй и третий экстраполяторы 34 и 35, третий и четвертый задатчики 18 и 42, третий компаратор 27, третий и четвертый ключи 30 и 31, четвертый блок 11 сравнения, четвертый масштабирующий блок 15 и четвертый блок 7 памяти. Это позволяет осуществлять учет статистической взаимосвязи между измерителями при контроле процесса резания различными способами. 7 ил.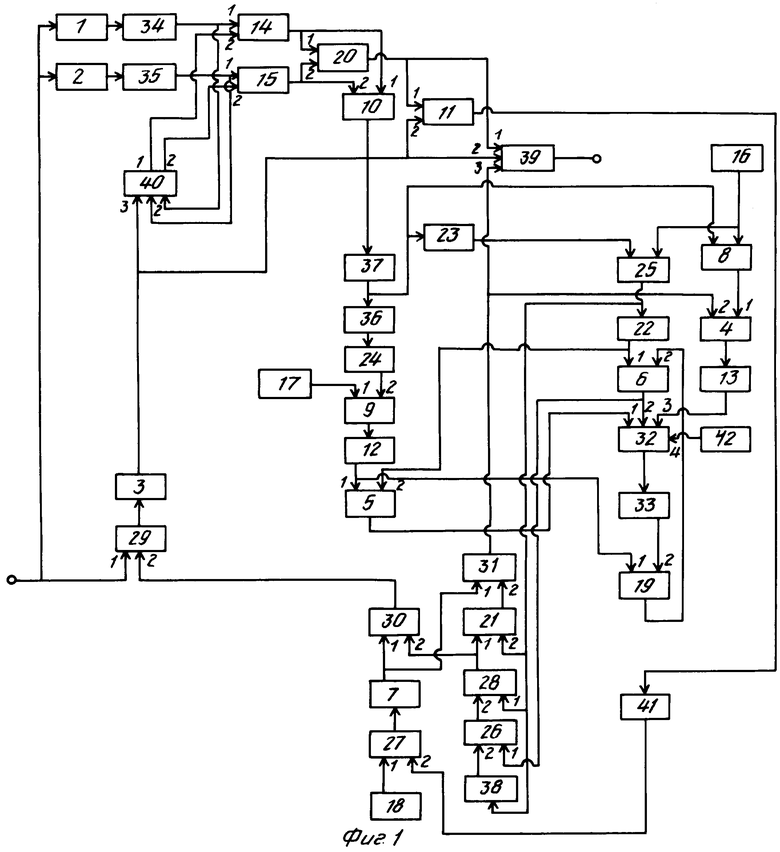
АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПРОЦЕССА КОНТРОЛЯ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ, содержащая три измерителя, по три блока памяти, блока сравнения и масштабирующих блока, по два задатчика, сумматора, блока задержки, блока определения модуля, компаратора, ключа, арифметический блок, экстраполятор, дифференциатор, фильтр низких частот, таймер и переключатель, выход которого соединен с выходом системы, выход первого задатчика соединен с первым входом первого блока сравнения и с вторым входом первого компаратора, выход второго задатчика с первым входом второго блока сравнения, выход первого масштабирующего блока с первым входом первого сумматора, выход первого блока памяти с входом второго масштабирующего блока, выход третьего блока сравнения с входом фильтра низкой частоты, выход которого соединен с вторым входом первого блока сравнения, через первый блок определения модуля с первым входом первого компаратора, а через последовательно включенные дифференциатор, второй блок определения модуля, второй блок сравнения, первый масштабирующий блок, второй блок памяти, арифметический блок, экстраполятор, первый сумматор, третий блок памяти с первым входом второго компаратора, выход третьего блока памяти подключен также к второму входу арифметического блока, выход первого ключа связан с первым входом второго ключа и первым входом блока задержки, выход второго ключа через третий измеритель соединен с вторым входом переключателя, выход первого компаратора соединен с входом второго блока задержки, вторым входом первого блока задержки, первым входом первого ключа и через таймер с вторым входом второго компаратора, выход которого связан с вторым входом первого ключа, выход второго блока задержки соединен с первым входом третьего блока памяти и вторым входом второго блока памяти, выход первого блока сравнения подключен к первому входу первого блока памяти, выход второго масштабирующего блока к третьему входу арифметического блока, вход системы соединен с первым входом второго ключа и входами первого и второго измерителей, выходы которых подключены к входу третьего блока сравнения и через последовательно соединенные третий масштабирующий блок и второй сумматор к первому входу переключателя, выход третьего масштабирующего блока связан также с первым входом третьего блока сравнения, отличающаяся тем, что в систему дополнительно введены дисперсиометр, идентификатор, второй и третий экстраполяторы, третий и четвертый задатчики, третий компаратор, третий и четвертый ключи, четвертый блок сравнения, четвертый масштабирующий блок и четвертый блок памяти, причем входы второго и третьего экстраполяторов соединены соответственно с выходами первого и второго измерителей, выход второго экстраполятора связан с первыми входами третьего масштабирующего блока и идентификатора, выход третьего экстраполятора с первым входом четвертого масштабирующего блока и вторым входом идентификатора, третий вход которого подключен к выходу третьего измерителя, а его первый и второй выходы к вторым входам третьего и четвертого масштабирующих блоков соответственно, выход четвертого масштабирующего блока соединен с вторыми входами второго сумматора и третьего блока сравнения, выход второго сумматора подключен к первому входу четвертого блока сравнения, второй вход которого связан с выходом третьего измерителя, а его выход с входом дисперсиометра, выход дисперсиометра соединен с первым входом третьего компаратора, второй вход которого связан с выходом третьего задатчика, а его выход с входом четвертого блока памяти, выход четвертого блока памяти соединен с первыми входами третьего и четвертого ключей, второй вход третьего ключа соединен с выходом первого ключа, а его выход с вторым входом второго ключа, второй вход четвертого ключа соединен с выходом первого блока задержки, а его выход - с третьим входом переключателя и вторым входом первого блока памяти, четвертый вход арифметического блока соединен с выходом четвертого задатчика.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Адаптивная система регулирования процесса контроля | 1985 |
|
SU1278808A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
