Изобретение относится к неразрушающему контролю ультразвуковым методом и может найти применение в различных отраслях промышленности, в частности для контроля ниппелей и муфт буровых замков, имеющих изменяющуюся толщину.
Известен способ и устройство для механизированного контроля ниппелей и муфт, которые позволяют выявлять дефекты, ориентированные только вдоль образующей. Установка позволяет выявлять скрытые металлургические дефекты в заготовках ниппелей и муфт буровых замков [1]
Наиболее близким техническим решением к изобретению является способ ультразвукового контроля изделий с изменяющейся толщиной, заключающийся в том, что изделие условно разделяют на зоны контроля, при сканировании излучают зондирующие импульсы, формируют строб-импульсы, соответствующие максимальной толщине в зоне, принимают эхо-импульсы в заданном строб-импульсном временном интервале и по положению эхо-импульса относительно строб-импульса зоны контроля судят о наличии дефекта в зоне.
Устройство ультразвукового контроля изделий с изменяющейся толщиной содержит синхронизатор, генератор зондирующих импульсов, ультразвуковой преобразователь, усилитель, формирователь строб-импульсов, подключенный к синхронизатору, и регистратор [2]
Недостатком способа и устройства является то, что они не обеспечивают качественный контроль изделий, имеющих отражатели, не являющиеся дефектами, что снижает достоверность выявления скрытых дефектов типа нарушения сплошности по всему сечению изделия со сложным профилем поверхности.
Целью изобретения является повышение достоверности контроля изделий со сложным профилем поверхности.
Поставленная цель достигается тем, что в способе ультразвукового контроля изделий с изменяющейся толщиной, заключающемся в том, что изделие условно разделяют на зоны контроля, при сканировании излучают зондирующие импульсы, формируют строб-импульсы, соответствующие максимальной толщине в зоне, принимают эхо-импульсы в заданном строб-импульсом временном интервале и по положению эхо-импульса относительно строб-импульса зоны контроля судят о наличии дефекта в зоне, над местами изменения профиля наружной или внутренней поверхности контролируемого изделия устанавливают датчики положения, при совпадении сигналов датчиков положения и эхо-сигналов выделяют сигналы, соответствующие изменению профиля поверхности, а переднюю границу строб-импульса перемещают относительно зондирующего импульса за пределы эхо-импульса, соответствующего изменению профиля поверхности.
Поставленная цель достигается тем, что устройство ультразвукового контроля изделий с изменяющейся толщиной, содержащее синхронизатор, генератор зондирующих импульсов, ультразвуковой преобразователь, усилитель, формирователь строб-импульсов, подключенный к синхронизатору, и регистратор, выполнено многоканальным по числу зон контроля, в каждом канале последовательно соединены генератор зондирующих импульсов, ультразвуковой преобразователь и усилитель, снабжено датчиками положения, выполненным в виде чувствительных элементов, предназначенных для размещения над местами изменения профиля поверхности, и приемников, расположенных на ультразвуковом преобразователе каждого канала, коммутатором, блоком управления, последовательно соединенными блоком аналоговой обработки, детектором и линией задержки, подключенной к регистратору, генератором тактовых импульсов, подключенным к второму входу формирователя строб-импульсов, и исполнительным органом, входы коммутатора соединены с выходами усилителей каналов и блока управления, выход с первыми входами блока аналоговой обработки и блока управления, выход синхронизатора соединен с вторыми входами блока управления и блока аналоговой обработки, с входом генератора тактовых импульсов и первым входом исполнительного органа, вторым входом соединенного с выходом линии задержки, третьим входом с выходом формирователя строб-импульсов, третьим и четвертым входами соединенного с выходами детектора и линии задержки соответственно. Первая группа входов формирователя строб-импульсов соединена с выходами приемников датчиков положения, вторая группа с соответствующими выходами блока управления, соединенного соответствующими выходами с входами блока аналоговой обработки, регистратора и исполнительного органа. Третий вход исполнительного органа объединен с соответствующим входом регистратора, а формирователь строб-импульсов выполнен из n пар каналов по числу зон контроля и содержит для каждой пары первой и второй пороговые блоки, подключенные к ним формирователь импульсов записи передней границы строб-импульса и формирователь импульса записи конца строб-импульса соответственно, подключенный к выходу формирователя импульса записи передней границы строб-импульса, входной регистр начала строб-импульса, подключенный к выходу формирователя импульса записи конца строб-импульса, селектор первого импульса записи конца строб-импульса, соединенный с ним входной регистр конца строб-импульса, подключенные к выходам входных регистров выходные регистры начала строб-импульса первого и второго каналов пары и выходные регистры конца строб-импульса первого и второго каналов пары, подключенные к выходам выходных регистров каналов начала и конца строб-импульсов первый и второй блоки сравнения соответственно, последовательно соединенные блок формирования передней границы строб-импульса, подключенный к выходу первого блока сравнения, и регистр сдвига, последовательно соединенные блок формирования задней границы строб-импульса, подключенный к выходу второго блока сравнения, и первую схему 2И, вторым входом соединенную с выходом регистра сдвига, выход которой является выходом формирователя строб-импульсов, последовательно соединенные выключатель зондирующих импульсов и схему ИСКЛЮЧАЮЩЕЕ ИЛИ выходом подключенную к выходному регистру начала строб-импульса второго канала пары и к входу блока формирования передней границы строб-импульса, последовательно соединенные формирователь начала строба, подключенный к второму входу схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, и вторую схему 2И, инвертор, включенный между выходом выключателя зондирующих импульсов и вторым входом второй схемы 2 И, последовательно соединенные формирователь конца строба, блок управления, схему 2 ИЛИ и счетчик-делитель, выходом подключенный к вторым входам блока управления, входных регистров и блоков сравнения, выход второй схемы 2 И соединен с вторым входом схемы 2 ИЛИ и третьими входами формирователя импульса записи передней границы строб-импульса и первого блока сравнения. Выход блока управления соединен с вторым входом селектора импульса записи конца строб-импульса и третьим входом второго блока сравнения. Выход синхронизатора соединен с соответствующими входами выключателя зондирующих импульсов, формирователей начала и конца строба, блока управления, блока формирования передней границы строб-импульса, регистра сдвига и блока формирования задней границы строб-импульса, выход тактового генератора подключен к соответствующим входам выключателя зондирующих импульсов, формирователей импульсов, записи, формирователей начала и конца строба, счетчика-делителя, блоков сравнения и регистра сдвига. Выходы блока управления устройства соединены с соответствующими входами выключателя зондирующих импульсов, формирователей начала и конца строба, входных и выходных регистров, а входы формирователей начала и конца строба являются первой группой входов формирователя строб-импульсов.
На фиг. 1 изображена блок-схема устройства; на фиг.2 блок формирователя строб-импульсов; на фиг.3-7 диаграммы, поясняющие работу устройства.
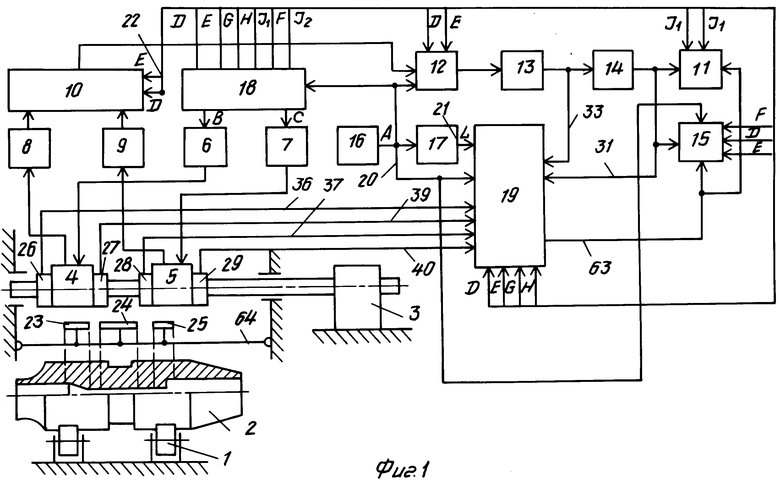
Устройство контроля изделий с изменяющейся толщиной содержит приводной стенд 1 для перемещения (вращения) контролируемого изделия 2, сканирующий механизм 3, например с двумя ультразвуковыми преобразователями 5, 4, каждый из которых соединен в своем канале с генератором 6 или 7 зондирующих импульсов и усилителем 8 или 9, подключенных к соответствующим каналам коммутатора 10. Выход последнего подключен к первому входу регистратора 11 через образующие канал обработки последовательно соединенные блок 12 аналоговой обработки сигналов, детектор 13 и линию 14 задержки, выход которой подключен также к первому входу исполнительного органа 15, выполненного в виде блока автоматической сигнализации дефекта с помехозащитой.
Синхронизатор 16 выходом подключен к генератору 17 тактовых импульсов, к входу блока 18 управления устройством и первому входу формирователя 19 строб-импульса, которым последний подключен к второму входу исполнительного органа 15, при этом выход генератора 17 тактовых импульсов подан на второй вход блока 19.
Блок 18 управления устройством своими выходами D, E, G, H, I1, F, I2 соединен соответственно с управляющими входами D, E блока 12 аналоговой обработки сигналов, подключен к управляющему входу I1 и I2 регистратора 11, к входам D, E, F исполнительного органа 15 и входам D, E, G, H формирователя 19 строб-импульса, при этом блок 18 управления устройством имеет соединение с тремя каналами 20, 21, 22 соответственно (канал синхронизатора, канал генератора тактовых импульсов и канал формирователя 19 строб-импульса).
Приводной стенд 1 снабжен кронштейном, на котором с возможностью фиксации установлены чувствительные элементы 23, 24, 25 профиля наружной 24 и внутренней 23, 25 поверхности контролируемого изделия 2. На каждом преобразователе 4 и 5 закреплена пара приемников соответственно 26, 27 и 28, 29, принадлежащих датчикам положения, фиксирующих изменения профиля наружной 26, 28 и внутренней 27, 29 поверхности контролируемого изделия 2. При этом каждый приемник соединен с соответствующим входом (третьим, четвертым, пятым или шестым) формирователя 19 строб-импульсов, седьмой и восьмой входы (аналоговые) которого связаны с коммутатором 10, причем седьмой через детектор 13, восьмой через линию 14 задержки. Выход формирователя 19 строб-импульса подключен к третьему входу исполнительного органа 15, соединенному с вторым входом регистратора 11.
Формирователь 19 строб-импульса, совместно с генератором 17 тактовых импульсов входящий в состав блока вычисления длительности зоны контроля, через канал 20 (первый вход формирователя) соединен с синхронизатором 16 (канал А фиг. 1, а также поз.20 на фиг.1 и 2), каналом 21 (второй вход формирователя 19) с генератором 17 тактовых импульсов (канал L фиг.1, 2), каналом 22 (входами D, E, G, Н) с блоком 18 управления (выходы D, E, G, H), при этом первый пороговый блок 30 входом 31 соединен с выходом линии 14 задержки (восьмой вход формирователя 19), а второй пороговый блок 32 входом 33 соединен с выходом детектора 13 (седьмой вход формирователя 19).
Выключатель 34 зондирующего импульса, служащий регулятором положения передней границы строб-импульса 19, одним входом соединен с каналом 22 формирователя 19 строб-импульсов, а входами, соединенными с каналами 21, 20 соответственно с генератором 17 тактовых импульсов с синхронизатором 16.
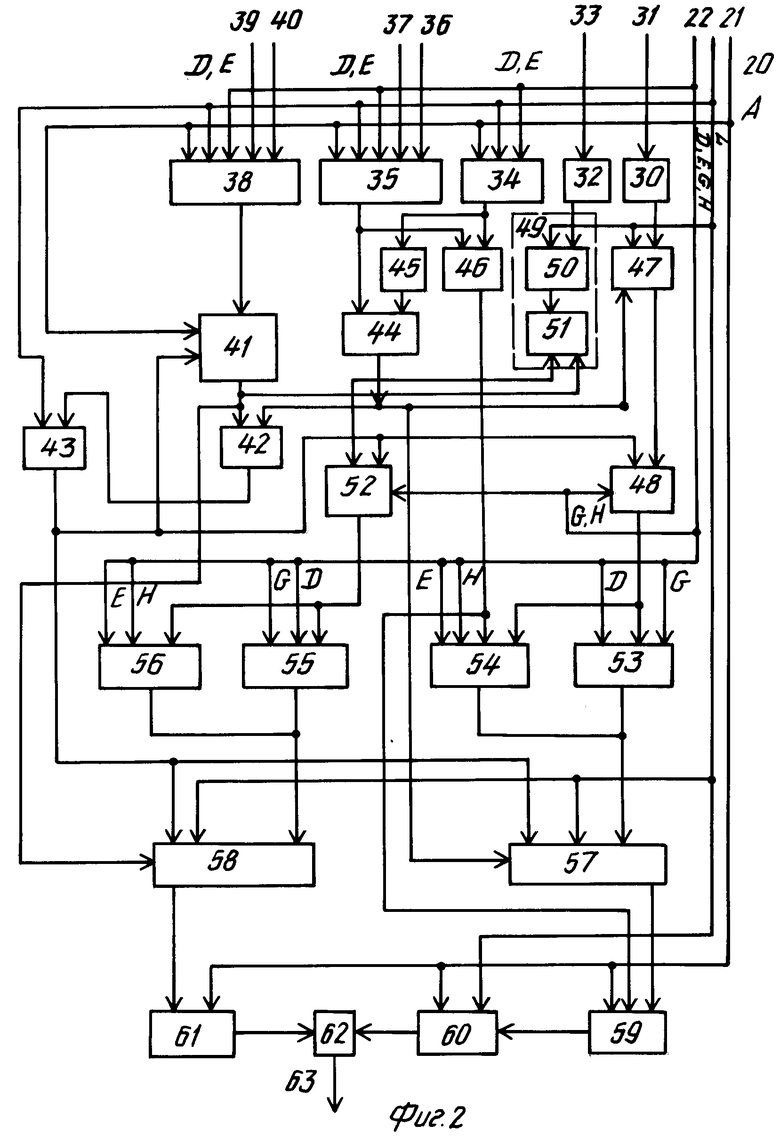
Формирователь 35 начала строб-импульса тремя входами соединен с каналами 20, 21, 22 соответственно синхронизатора, генератора тактовых импульсов, формирователя строб-импульсов, а входами 36, 37 (фиг.2) подключен к приемникам 26, 28 изменения профиля наружной поверхности изделия 2 датчиков положения. Формирователь 38 конца строб-импульса тремя входами соединен с каналами 20, 21, 22, а входами 39, 40 с выходами приемников 27, 29 изменения профиля внутренней поверхности изделия 2.
Блок 41 управления счетчиком-делителем через схему 2 ИЛИ 42 соединен с входом счетчика-делителя 43, второй вход которого соединен по каналу 21 с генератором 17 тактовых импульсов, а выход с одним из входов блока 41 управления счетчиком-делителем, другой вход которого соединен с выходом входного блока 38 формирования конца строб-импульса, третий с каналом 20 синхронизатора 16.
Второй вход схемы 2 ИЛИ 42 подключен к выходу первой схемы 2 И. Один вход первой схемы 2 И 44 через инвертор 45 соединен с выходом 34 зондирующего импульса, а другой вход непосредственно с выходом формирователя 35 начала строб-импульса. Кроме того, выход формирователя 35 соединен с одним входом схемы 46 ИСКЛЮЧАЮЩЕЕ ИЛИ, второй вход которой подан непосредственно на выход выключателя 34 зондирующего импульса.
Выход первой схемы 2 И 44 соединен с одним входом формирователя 47 импульса записи передней границы строб-импульса, управляемого эхо-сигналом от зоны, обозначенной пунктирными линиями на контролируемом изделии, изменения профиля поверхности, при этом два других его входа 47 соединены соответственно с пороговым устройством 30 и каналом 21 тактовых импульсов, а выход формирователя 47 с первым входом входного регистра 48 формирования начала строб-импульса, второй вход которого соединен с выходом счетчика-делителя 43, а третий с каналом 22 блока 18 управления устройством.
Формирователь 49 импульса конца строб-импульса выполнен в виде селектора 50 импульса записи конца строб-импульса и последовательно с ним соединенного формирователя 51, выполненного в виде селектора первого импульса записи конца строб-импульса, при этом один вход селектора 50 импульсов записи конца строб-импульса соединен с выходом порогового устройства 32, а другой вход с каналом 21 генератора 17 тактовых импульсов, с входом формирователя 51 соединен выход блока 41.
Выход формирователя 51 соединен с входным регистром 52 конца строб-импульса, второй вход входного регистра 52 конца строб-импульса соединен с выходом счетчика-делителя 43, а его третий вход с каналом 22 блока 18 управления. Выход входного регистра 48 начала строб-импульса соединен с выходным регистром 53 начала строб-импульса второго измерительного канала, а выход входного регистра 52 с выходным регистром 55 конца строб-импульса первого измерительного канала и выходным регистром 56 конца строб-импульса второго измерительного канала, при этом другие входы регистров 53, 54, 55, 56 соединены с каналом 22 блока управления, а третий вход регистра 54 с выходом схемы 46 ИСКЛЮЧАЮЩЕЕ ИЛИ.
Выходы регистров 53, 54 соединены с блоком 57 сравнения (начало строб-импульса), а каждый выход регистров 55 и 56 с блоком 58 сравнения (конца строб-импульса), вторые входы блоков 57 и 58 сравнения с каналом 21 генератора 17 тактовых импульсов, третьи входы блоков 57 и 58 сравнения с выходом счетчика-делителя 54, а четвертые входы с выходом блока 41 управления счетчиком-делителем.
Выход блока 57 сравнения соединен с входом блока 59 формирования передней границы строб-импульса, второй вход которого соединен каналом 20 с синхрогенератором 16, а третий вход с выходом схемы 46 ИСКЛЮЧАЮЩЕЕ ИЛИ. Выход блока 59 формирования передней границы строб-импульса соединен с регистром 60 сдвига начала строб-импульса, второй вход которого соединен с каналом 21 генератора 17 тактовых импульсов, а третий с каналом 20 синхронизатора 16.
Выход блока 58 сравнения соединен с блоком 61 формирования задней границы строб-импульса, второй вход которого соединен с каналом 20. Выход блока 59 через регистр 60 сдвига соединен с второй схемой 2 И 62, выход 63 которой соединен с входом исполнительного органа 15 и регистратора 11, а выход блока 61 с вторым входом схемы 2 И 62 соединен непосредственно. Чувствительные элементы 23-25 установлены на кронштейне 64.
Чувствительные элементы 23-25 датчиков положения выполнены, например, в виде пластин из ферромагнитного материала, приемники 26-29 представляют собой катушки индуктивности. Количество чувствительных элементов выбрано в зависимости от количества переходных зон, а количество приемников зависит от количества поверхностей (в данном случае наружная и внутренняя), причем каждый преобразователь 4, 5 снабжен двумя приемниками (для наружной и внутренней поверхности соответственно). Основу блока 18 составляют счетчики-делители и дешифраторы.
На фиг.3 изображены: эпюра А, соответствующая синхроимпульсам синхронизатора 16, эпюры напряжений управляющих сигналов D, E, F, G, H, I1, I2 блока 18 управления, которые он вырабатывает по синхроимпульсам, а также короткие импульсы В и С для поочередного запуска генераторов 6, 7 зондирующих импульсов.
Исполнительный орган 15 работает под управлением сигналов D, E, F. Сигналы D и Е указывают на текущий номер измерительного канала, а сигнал F служит для различения двух тактов в устройстве помехозащиты исполнительного органа 15. Синхронизация исполнительного органа осуществляется сигналами СИ (эпюра А) с выхода синхронизатора 16.
Блок 18 управления сигналами управляет блоками 48, 52, 53, 55, когда работает первый измерительный канал, а сигналами Н блоками 48, 52, 53, 54,56, когда работает второй измерительный канал. Импульсы L вырабатываются генератором 17 тактовых импульсов при поступлении на его вход заднего фронта синхроимпульса А (СИ), а импульсами I1, I2 запускаются развертки в регистраторе 11: I1 развертка первого измерительного канала; I2 развертка второго измерительного канала. Сигналами D и Е открывается вход коммутатора 10 первого измерительного канала, а сигналами Е вход коммутатора 10 второго измерительного канала.
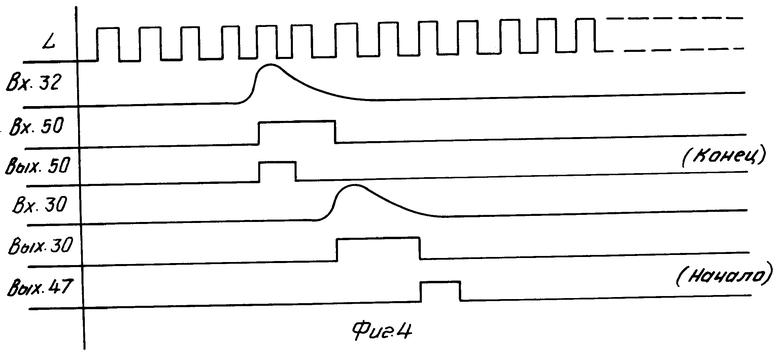
На фиг.4 приведена иллюстрация работы блоков 30, 32 47 и 50. В блоках 30 и 32 происходит формирование поступающих на входы этих блоков видеоимпульсов по длительности с точностью до длительности тика. В блоке 47 формируется импульс длительностью в один тик, отмечающий конец задержанного видеоимпульса и служащий для записи начала строб-импульса во входной регистр 48. В блоке 50 происходит формирование импульса длительностью в один тик, отмечающего начало видеоимпульса, служащего в дальнейшем для формирования в блоке 51 импульса записи строб-импульса в регистр 52. Блок 51 обеспечивает прохождение только одного (первого) импульса записи.
Блок 18 управления обеспечивает работу устройства в двух режимах: в режиме с фиксированной настройкой границ строб-импульсов и в режиме автоматической перестройки границ строб-импульсов в процессе контроля.
Способ осуществляется следующим образом.
На приводной стенд 1 устанавливают изделие 2, подлежащее контролю качества материала. Изделие условно разделяют на зоны контроля. В зоны контроля подводят блок ультразвуковых преобразователей 4 и 5 с помощью сканирующего механизма 3. Предварительно, над местами изменения профиля (ограничены на фиг. 1 пунктирными линиями) наружной или внутренней поверхности контролируемого изделия 2 устанавливают чувствительные элементы 23-25, которые с возможностью фиксации размещены на кронштейнах 6, 4. Включают дефектоскопическую аппаратуру, подают управляющее напряжение Uо на вход (не показан) исполнительного органа 15, который в этом случае устанавливается в исходное состояние, т.е. в состояние "Нуль". Включается синхронизатор 16, который начинает вырабатывать последовательно синхроимпульсы СИ (эпюра А).
По синхроимпульсам блок 18 управления вырабатывает совокупность сигналов, которые являются управляющими для блоков устройства. На входы регистратора 11 и исполнительного органа 15 поступает сигнал строб-импульса с выхода 63 блока формирователя строб-импульса 19 для выделения зоны контроля и визуализации этой зоны. После этого начинают прозвучивать изделие 2 с помощью блока ультразвуковых преобразователей 4 и 5, например, по спирали путем вращения контролируемого изделия 2 приводным стендом 1 и перемещения вдоль него образующей блока преобразователей с помощью сканирующего механизма 3.
Рассмотрим осуществление способа в режиме автоматической настройки границ строб-импульсов.
В исходном положении, когда преобразователи 4 и 5 со своими приемниками 26-29 датчиков положения находятся вне границ зон изменения профиля, т.е. не взаимодействуют с чувствительными элементами 23-25, находящимися над местами изменения профиля, длительность строб-импульсов в каждом измерительном канале (эпюра 62) имеет максимальную величину, пропорциональную толщине контролируемого изделия в данной зоне.
В процессе перемещения сканирующим механизмом 3 вдоль образующей вращающегося приводным стендом 1 контролируемого изделия первым в работу включается, например, ультразвуковой преобразователь 4, установленный в первом измерительном канале. В этом случае блок 18 управления вырабатывает короткие импульсы (эпюры В), которые со скважностью синхроимпульсов (эпюра А) синхронизатора 16 запускают генератор 6 зондирующих импульсов, импульсы которых (не показано) возбуждают ультразвуковой преобразователь 4, акустические импульсы его проникают в изделие 2. Одновременно с этим блоком 18 управления устройством вырабатываются импульсы (эпюры D, E, G, I1).
Акустические импульсы, отраженные от дефекта в контролируемом изделии 2, поступают на ультразвуковой преобразователь 4, который в это время работает как приемник. В нем акустический эхо-импульс от дефекта превращается в электрический сигнал (эпюры вх. 30, вх.32), усиливается усилителем 8 и поступает в коммутатор 10, вход первого измерительного канала его открыт сигналом (эпюра D), в результате этого электрический сигнал от дефекта с выхода коммутатора 10 поступает в блок 12 аналоговой обработки сигналов, так как он открыт тем же сигналом (эпюра D). В этом блоке 12 электрический сигнал обрабатывается, например, схемой временной регулировки чувствительности (ВРЧ).
Подвергнутый аналоговой обработке сигнал от дефекта после детектирования в детекторе 13 поступает на вход линии 14 задержки и на аналоговый вход 33 блока 19 формирования строб-импульса, на другой вход которого поступает сигнал D. Задержанный сигнал линией 14 задержки поступает на второй аналоговый вход 31 блока 19 формирования строб-импульса и на видеоконтрольное устройство регистратора 11, временная развертка которого запущена импульсами (эпюра I1) первого измерительного канала.
Одновременно с этим задержанный сигнал линией 14 задержки поступает в исполнительный орган 15, например сигнализатор дефектов. В исполнительный орган 15 поступают сигналы (эпюры D и Е). При этом сигнал D указывает, что работает первый измерительный канал, а сигнал Е предназначен для двух тактов в блоке помехозащиты. Одновременно с этим на видеоконтрольное устройство регистратора 11 и исполнительный орган 15 поступает сигнал строб-импульса (эпюра 62) по каналу 63 для визуализации зоны контроля в регистраторе 11 и выделении зоны контроля в исполнительном органе 15. Синхронная работа измерительного канала осуществляется синхроимпульсами (эпюра А (СИ) при работе синхронизатора 16.
Таким же образом работает второй (n-ный) измерительный канал. В этом случае блоком 18 управления вырабатывается запускающий сигнал (эпюра С), который запускает генератор 7 зондирующих импульсов, а вход усилителя 9 в коммутаторе 10 открывает импульс Е, этот же импульс открывает входы блока аналоговой обработки 12, исполнительного органа 15 и блока формирователя строб-импульса 19, сигнал I2 запускает второго измерительного канала временную развертку в регистраторе 11. В этом случае работает в режимах излучения и приема ультразвуковой преобразователь 5. Таким же путем совмещают на регистраторе 11 и исполнительном органе 17 сигналы строб-импульса и дефекта (если он обнаружен этим измерительным каналом).
В процессе поиска дефектов, когда ультразвуковые преобразователи 4 и 5 со своими приемниками 26-29 датчиков положения находятся вне зон изменения профиля, т. е. когда упомянутые приемники не взаимодействуют с чувствительными элементами 23-25 датчиков положения, на выходах приемников 26-29 нет сигналов (установлены низкие уровни логических сигналов). В этом случае передний фронт (граница) строб-импульса в каждом измерительном канале начинает формироваться блоком 34 выключателем зондирующего импульса.
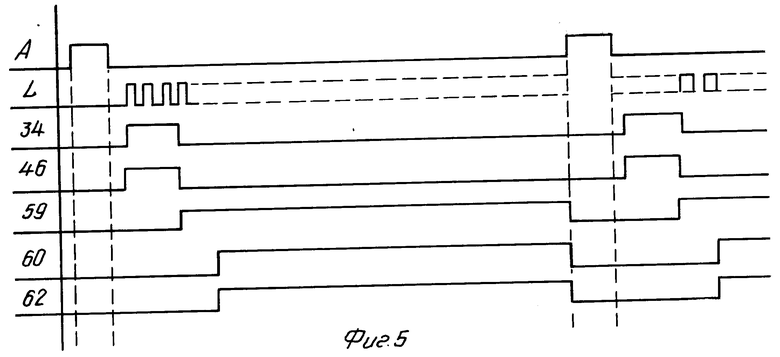
По отрицательному перепаду (заднему фронту) синхроимпульсов (эпюра А) (фиг. 5) блок 34 вырабатывает по каждому каналу протактированный тактовыми импульсами (тиками) генератора 17 тактовых импульсов, импульсы (эпюра 34) блока 3 поступают на схему 46 ИСКЛЮЧАЮЩЕЕ ИЛИ.
С выхода схемы 46 при низком уровне сигнала на его втором входе с выхода блока 36 начального формирователя строб-импульса происходит повторение импульса со схемы 46. По отрицательному перепаду (заднему фронту) этого импульса происходит переключение триггера (не показан) в блоке 59 формирования передней границы строб-импульса в высокое состояние (эпюра 59), а низкий уровень этого сигнала устанавливается каждый раз передним фронтом синхроимпульса (эпюра А).
После сдвига этого сигнала (эпюра 59) на заданное число тиков (эпюра L) в сдвиговом регистре 60 (на фиг.6 показан сдвиг на 4 тика), сигнал подается с выхода регистра 60 сдвига на вторую схему 2 И 62, а на ее второй вход с выхода блока 61 формирования задней границы строб-импульса поступает высокий уровень сигнала, так как в этом режиме выход блока 61 находится в состоянии высокого уровня сигнала и постоянно подтверждается синхроимпульсами (эпюра А).
Таким образом на выходе схемы 62 формируется начало и конец строб-импульса (эпюра 62). Сформированный строб-импульс по каналу 63 поступает на регистратор 11 и исполнительный орган 15. Если в это время одним из измерительных каналов обнаружен дефект, электрический сигнал от которого после линии 14 задержки поступает на регистратор 11 и совпадает по времени со строб-импульсом на экране регистратора 11, а при совпадении по времени этих сигналов в блоке исполнительного органа 15 включается, например, световая сигнализация (не показано) "Дефект".
Длительность этого строб-импульса (эпюра 62) является максимальной и пропорциональна максимальной толщине контролируемого изделия 2.
Поиск дефектов в изделии 2 продолжается и сканирующим механизмом 3 ультразвуковые преобразователи 4 и 5 с приемниками 26-29 перемещаются вдоль образующей изделия. В результате такого перемещения, например, приемник 26, закрепленный на ультразвуковом преобразователе 4, управляющим положением передней границы строб-импульса, совпадает с чувствительным элементом 24, установленным на кронштейне 64 над местом изменения профиля наружной поверхности изделия (кольцевая проточка). В этом случае необходимо отстроиться от эхо-сигналов, отраженных от кромок проточки, так чтобы они не попали в створ строб-импульса. В этом случае необходимо "передвинуть" переднюю границу строб-импульса на такую величину от зондирующего импульса, чтобы эхо-сигналы от проточки не могли сместиться со строб-импульсом и тем самым была бы исключена ложная браковка изделия 2. Это осуществляется следующим образом. При совмещении чувствительного элемента 24 с приемником 26 датчика положения сигнал высокого уровня с приемника 26 по каналу (проводу) 36 поступает в блок 35 начального формирования начала строб-импульса. В блоке 35 формируется сигнал (эпюра 35), который поступает на второй вход схемы 46 ИСКЛЮЧАЮЩЕЕ ИЛИ, при этом блок 34 продолжает вырабатывать импульсы (эпюра 34). В результате этого на выходе схемы 46 ИСКЛЮЧАЮЩЕЕ ИЛИ появляется разностный сигнал высокого уровня (эпюра 46) (фиг.6). Этот сигнал поступает в блок 59, где задним фронтом переключает триггер, который в этом же такте осуществляет скачкообразное перемещение передней границы строб-импульса. Это видно, если сравнить положения задних фронтов импульсов 46 (на фиг.5 и 6) в первом случае положение импульса 46 такое, когда чувствительный элемент не совмещен с приемником датчика положения, а во втором когда они совмещены. Укороченный сигнал из блока 59 поступает через регистр 60 сдвига на схему 2 И 62, на выходе которой формируется укороченный строб-импульс (эпюра 62 на фиг.6). При этом задний фронт этого строб-импульса остается на прежнем месте, как до совмещения чувствительного элемента с приемником датчика положения.
Полученный таким образом короткий строб-импульс не позволяет выявлять дефекты по всему сечению стенки контролируемого изделия 2 в зоне изменения профиля. Для увеличения объема контроля формируется строб-импульс большей длительности чем тот, который был сформирован при совмещении чувствительного элемента 34 с приемником 26.
Новый строб-импульс при совмещении упомянутых элементов датчика положения формируется эхо-импульсом (эпюры вх.32 и вх.30), зафиксированным ультразвуковым преобразователем и обработанным первым (вторым) измерительным каналом от границ проточки на наружной поверхности изделия 2.
Прежде чем сформировать увеличенной длительности новый строб-импульс, формируют "внутренний" строб-импульс (эпюра 44 на фиг.6). Для этого с выхода блока 35 начального формирования начала строб-импульса на первую схему 2 И 44, как и на схему 46 поступают сигналы (эпюра 35), а на второй вход схемы 44 поступают через инвертор 45 сигналы (эпюра 34) с выхода выключателя 34 зондирующего импульса. В результате чего происходит в схеме 44 формирование импульса (эпюра 44), аналогичного импульсу 45.
По высокому уровню сигнала с выхода схемы 44 разрешается прохождение импульса записи из блока 47 формирователя импульса записи передней границы строб-импульса, разрешается работа блока 57 сравнения начала строб-импульса и через схему 3 ИЛИ 42 происходит снятие сброса со счетчика-делителя 43, работающего по сигналам тиков генератора 17 тактовых импульсов.
На фиг. 6 в качестве примера приведен четырехразрядный код на выходе счетчика делителя 43. При появлении в этом измерительном канале в пределах внутреннего строб-импульса 44 видеоимпульса (эхо-импульса) от места сопряжения проточки с поверхностью изделия (эпюра вх.32) незадержанный видеосигнал по каналу 33 поступает на второе пороговое устройство 32 и задержанный линией 14 задержки по каналу 31 на первое пороговое устройство 30 и по переднему фронту с выхода блока 47 формирователя импульса записи передней границы строб-импульса импульс (эпюра вых.47) проводит во входной регистр 48 начала строб-импульса запись кода с выхода счетчика-делителя 43, причем перед записью в регистре 48 хранится код, содержащий единицы во всех разрядах, который систематически устанавливается по сигналам G или Н в зависимости от номера измерительного канала (фиг.3). После этого из входного регистра 48 происходит перезапись полученного кода в один из выходных регистров 53 и 54 (включенного первого или второго измерительного канала), и по сигналу G или Н устанавливается в регистре 48 код из "единиц".
По сигналу D или Е (в зависимости от номера измерительного канала) осуществляется подключение выхода регистра 5 или 54 к общему выходу, соединенному с входом блока 57 сравнения. Одновременно с этим на второй вход блока 57 сравнения поступает текущий код с выхода счетчика-делителя 43, таким образом в следующем после записи кода во входной регистр 48 происходит в блоке 57 сравнения сравнение кодов блока 48 и счетчика-делителя 43, а в регистре 48 происходит запись нового положения импульса, формируемого блоком 47 (эпюра Вых. 47). Эпюра Вых. 47 формируется задним фронтом выходным нормированным сигналом (эпюра Вых.40) первого порогового устройства 30, полученным видеосигналом (эпюра Вх.30) эхо-импульса от места сопряжения проточки с наружной поверхностью изделия 2.
При совпадении кодов блоков 43 и 48 на выходе блока 57 сравнения появляется импульс, повторяющий один импульс тика, который устанавливает триггер в блоке 59 в высокое состояние (это произойдет до того, как этот блок 59 отреагирует на задний фронт импульса блока 46). Это обеспечит скачкообразное смещение начала строб-импульса к видеосигналу упомянутого эхо-импульса. В этом случае новый строб-импульс по длительности будет больше предыдущего.
Если в течение действия "внутреннего" строб-импульса (эпюра 44) появится несколько видеосигналов, то запомнится положение конца последнего из них.
Новый строб-импульс (с передвинутой передней границей) будет существовать до следующего зондирующего импульса, например, эпюра G.
Количество сдвигов в регистре 60 устанавливается от количества измерительных каналов, в данном случае двух.
При исчезновении мешающего видеоимпульса (в процессе дальнейшего перемещения ультразвуковых преобразователей 4 и 5 сканирующим механизмом 3) импульс записи Вых. 47 не будет сформирован. В этом случае в выходной регистр, например 53, в конце такта перепишутся все единицы из регистра 48 и блок 57 cравнения не выработает на своем выходе управляющий импульс для блока 59, это сделает задний фронт импульса с выхода блока 46, т.е. длительность строб-импульса укоротится до предыдущего значения. Эта граница будет удерживаться до тех пор, пока не перестанут взаимодействовать между собой чувствительный элемент 24 с приемником 26 датчика положения. Это определяется предварительной настройкой и имеет минимальную протяженность, как только эти элементы датчика положения перестанут взаимодействовать между собой установится длительность строб-импульса максимальной длительности, т.е. для фиксации дефектов по всему сечению стенки изделия. В этом случае начало строб-импульса определяется задним фронтом импульса блока 34.
Поиск дефектов продолжается.
Преобразователи 4 и 5 сканирующим механизмом 3 перемещаются вдоль образующей изделий 2. Ультразвуковой преобразователь 4 перемещается в зону изменения профиля внутренней поверхности изделия 2, т.е. в место, над которым установлен чувствительный элемент, например 23, и с ним начинает взаимодействовать приемник 27 датчика положения. В этом случае сигнал с приемника 27 по каналу 39 запускает блок 38 начального формирования начала конца строб-импульса (эпюра 38). В этом случае задним фронтом импульса 38 блок 41 вырабатывает сигнал (эпюра 41), выводящий счетчик-делитель 43 из состояния сброса. При этом возврат блока 41 в исходное состояние осуществляется синхроимпульсом (эпюра А) или по сигналу переполнения счетчика-делителя 43. Итак, сигнал 41, пройдя через схему 2 ИЛИ 42 выводит счетчик-делитель 43 из состояния сброса (второй раз за такт, если перед этим он работал по сигналу блока 44). Одновременно с этим с выхода блока 41 сигнал поступает на входы селектора 51 первого импульса записи конца строб-импульса и на блок 58 сравнения конца строб-импульса.
В исходном положении блок 58 сравнения находится в "нулевом" положении (устанавливается сигналами G или Н, в зависимости от номера измерительного канала) и следовательно, выходные регистры 55 и 56 обесточены (процедура перезаписи аналогична описанной для регистров 53 и 54). В это время счетчик-делитель 43 также не участвует в работе. При появлении на выходе блока 41 высокого уровня сигнала срабатывает одновременно с его передним фронтом блок 58 сравнения и на его выходе сигнал производит сброс триггера 61 (в положение "Единицы" его устанавливают синхроимпульсы, эпюра А), тем самым формируется задняя граница строб-импульса 62 по заднему фронту импульса 38 до прихода следующего синхроимпульса.
При появлении видеоимпульса (вх.32) эхо-сигнал от места сопряжения двух внутренних отверстий различного диаметра изделия 2, поступающего по каналу 33 на второе пороговое устройство 32 с выхода детектора 13 в пределах "внутреннего" строб-импульса 41 (фиг.4 и 7), на вход блока 50 формирователя импульса записи конца cтроба-импульса поступает формализованный импульс, который блоком 50 формирователя 49 импульса конца строб-импульса укорачивается по длительности, равной одному тику (эпюра L на фиг.4 и 7), совпадающей с точностью до тика с начала незадержанного видеоимпульса (эпюра Вх.32). Пройдя через селектор 51 первого импульса записи конца строб-импульса блока 49, импульс (эпюра Вых.50) поступает на второй регистр 52 конца строб-импульса, при этом селектор 51 пропускает только первый видеоимпульс в случае следования нескольких видеоимпульсов. Регистром 52 по входному импульсу (вых.51) производится запись текущего состояния счетчика-делителя 43 (второй вход регистра 52).
Запомненный код поступает на выходной регистр 55, если работает первый измерительный канал, или на регистр 56, если работает второй измерительный канал. Код с выхода регистра 55 или 56 сравнивается с текущим кодом счетчика-делителя 43 в блоке 58 сравнения и при их совпадении вырабатывается импульс, который "сбрасывает" триггер 61 в нулевое положение, тем самым формируется новая задняя граница строб-импульса 62. В этом случае задержанный линией 14 задержки видеосигнал эхо-сигнала от места сопряжения попадает на видеоконтрольное устройство регистратор 11 и исполнительный орган 15 после задней границы сформированного строб-импульса. Из этих соображений устанавливается величина возможной задержки эхо-сигнала.
В процессе дальнейшего перемещения преобразователей 4 и 5 сканирующим механизмом 3 видеоимпульс эхо-сигнала в пределах внутреннего строб-импульса 41 исчезает, что возвращает задний фронт строб-импульса в предыдущее положение, определяемое фронтом импульса 38.
Далее, при прекращении взаимодействия чувствительного элемента 23 с приемником 27 датчика положения в процессе удаления ультразвуковых преобразователей 4 и 5 из этой зоны, прекращается работа блока 38, счетчик-делитель 43 остается в состоянии сброса, работа цепи формирования задней границы строб-импульса прекращается и границы строб-импульса 62 определяются только цепью формирования переднего фронта, т.е. в этом случае длительность строб-импульса 62 становится максимальной.
Перевод устройства во второй режим с фиксированной настройкой границ строб-импульса 62 осуществляется по сигналам I1 и I2 с помощью ручного блокиратора блоков 30, 32 и 35, а блок 38 в этом случае переводится в режим запуска независимо от взаимного расположения соответствующих пар чувствительный элемент-приемник датчиков положения. В этом случае работа устройства по формированию строб-импульса будет аналогично описанной, когда передний фронт строб-импульса определяется задним фронтом импульса 34, а задний фронт задним фронтом импульса 38.
В том случае, когда видеосигналы эхо-импульсов от дефектов (эпюры Вх. 30 и Вх. 32) не попадают в створы "внутренних" строб-импульсов 41 и 44, они являются сигналами от дефектов, обнаруженных преобразователями 4 и 5, и, следовательно, попадают в створ строб-импульса 62, поэтому их можно наблюдать на регистраторе 11 и отключается в исполнительном органе 15 сигнализация об обнаруженном дефекте.
Такое выполнение способа и устройства позволяет отстроиться от ложных сигналов, обусловленных изменением профиля (толщины) контролируемого изделия и тем самым повысить достоверность контроля в автоматическом режиме поиска дефектов при контроле изделий со сложным профилем (изменяющейся толщиной), а при работе во втором режиме (с фиксированным строб-импульсом) проводить контроль изделий простой формы, например труб, прутков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для ультразвукового контроля изделий | 1989 |
|
SU1732259A1 |
| Ультразвуковой дефектоскоп | 1987 |
|
SU1471118A1 |
| Устройство для ультразвукового контроля изделий | 1987 |
|
SU1631404A1 |
| АВТОМАТИЧЕСКИЙ СИГНАЛИЗАТОР ДЕФЕКТОВ К УЛЬТРАЗВУКОВОМУ ДЕФЕКТОСКОПУ | 2008 |
|
RU2357242C1 |
| Ультразвуковой дефектоскоп | 1985 |
|
SU1364974A1 |
| Устройство для автоматического ультразвукового контроля изделия | 1983 |
|
SU1133543A1 |
| Ультразвуковой эхо-импульсный дефектоскоп | 1987 |
|
SU1446559A1 |
| Ультразвуковой эхо-импульсный дефектоскоп | 1981 |
|
SU974259A1 |
| Ультразвуковой дефектоскоп для контроля сварных швов | 1986 |
|
SU1388786A1 |
| Ультразвуковой дефектоскоп | 1983 |
|
SU1087884A1 |



Изобретение относится к технологическому оборудованию для неразрушающего контроля изделий сложной формы и может быть использовано, в частности, для контроля ниппелей и муфт буровых замков. Изобретение позволяет повысить достоверность при контроле изделий со сложным профилем поверхности за счет того, что на границах зон контроля, выбранных в соответствии с изменяющимся профилем поверхности изделия, устанавливают датчики положения, по сигналу с которых осуществляют формирование управляющего сигнала длительностью и положением строб-импульса в каждом измерительном канале. Устройство, реализующее способ, снабжено датчиками положения, каждый из которых выполнен в виде индикатора, расположенного в зоне контроля, и приемника, установленного на ультразвуковом преобразователе соответствующего измерительного канала, а также выполнением формирователя строб-импульсов. 2 с.п.ф-лы, 7 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ультразвуковой дефектоскоп | 1987 |
|
SU1446558A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
