Изобретение относится к геофизике, в частности к способам геоэлектроразведки с использованием электромагнитных волн высокой частоты, и предназначено для обнаружения подповерхностных объектов, например рудных месторождений.
Известные способы геоэлектроразведки основаны на использовании последовательности знакочередующих прямоугольных импульсов тока со скважностью два (авт.св. N 959005, кл. G 01 V 3/06, 1981); на непрерывном излучении над исследуемой поверхностью двухчастотного сигнала, измерении отраженного сигнала, их сравнении и выделении по разности сигналов поляризационно-анизотропных аномалий (авт. св. N 959007, кл. G01 V 3/10, 1981); на зондировании среды электромагнитными импульсами конечной длительности и регистрации сигналов вторичного поля в паузах между импульсами (авт.св. N 968776, кл. G 01 V 3/10, 1981); на использовании в качестве модулирующих сигналов функции Уолша (авт. св. N 1037197, кл. G 01 V 3/12, 1982; N 11505843, кл. G 01 V 3/08, 1982); на облучении исследуемой среды широкополосными периодическими импульсами с последующей обработкой отраженных импульсов в двух точках [1] на использовании многочастотного зондирующего сигнала, который формируется из последовательности радиоимпульсов с заданными периодом, длительностью и формой модулирующего сигнала [2] и другие.
Из известных способов наиболее близким к предлагаемому является способ геоэлектроразведки [2] который выбран в качестве прототипа.
Однако указанный способ, используя простой зондирующий сигнал, имеет сравнительно низкие помехоустойчивость, чувствительность и точность измерения.
Целью изобретения является повышение помехоустойчивости, чувствительности и точности измерения.
Цель достигается за счет того, что формируют последовательность радиоимпульсов с заданными периодом, длительностью и формой модулирующего импульса, изменяют частоту несущей от радиоимпульса к радиоимпульсу последовательно по заданному закону, для формирования зондирующего сигнала выполняют фазовую манипуляцию на 180опоследовательности радиоимпульсов, принимают отраженный фазоманипулированный сигнал, формируют опорное напряжение со стабильной частотой, перемножают его с отраженным фазоманипулированным сигналом, фильтруют напряжение суммарной частоты, перемножают его с зондирующим фазоманипулированным сигналом, фильтруют напряжение разностной частоты, определяют величину разности фаз между напряжением разностной частоты и опорным напряжением, функцию зависимости величины разности фаз от номера радиоимпульса и ее корреляционные характеристики, по измеренным величинам судят о свойствах геологических тел и вмещающих пород, одновременно производят корреляционную обработку зондирующего и отраженного фазоманипулированных сигналов, по максимальному значению корреляционной функции определяют время задержки отраженного фазоманипулированного сигнала по отношению к зондирующему фазоманипулированному сигналу, по значению времени задержки судят о глубине залегания геологических тел.
Геоэлектроразведку по предлагаемому способу осуществляют путем выполнения следующей последовательности операций.
Формируют последовательность радиоимпульсов с заданным периодом, длительностью и формой модулирующего импульса
Uc(t) Uc˙cos(ωit + ϕi), 0≅t≅Ti, где Uc, ωi, ϕi, Ti амплитуда, несущая частота, начальная фаза и длительность радиоимпульсов.
Изменяют частоту несущей от радиоимпульса к радиоимпульсу последовательно по заданному закону.
Для формирования зондирующего сигнала выполняют фазовую манипуляцию на 180о последовательности радиоимпульсов
U1(t) Uc˙cos[ ωit + ϕk(t) + ϕi]
0≅t≅Ti, где ϕk(t) 0, π- манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М(t), причем ϕk(t) соnst при К τи < t < (K + 1)τи и может изменяться скачком при t K τи, т.е. на границах между элементарными посылками (К 1, 2, Ni-1);
τи, Ni длительность и количество элементарных посылок, из которых составлен i-й радиоимпульс длительностью Тi (Ti= Ni τи).
Принимают отраженный фазоманипулированный сигнал U2(t) U2˙cos[ωit + ϕk(t) + ϕi+Δ ϕi]
0≅t≅Ti, где Δϕi= ωiτ= фазовый сдвиг.
фазовый сдвиг.
Формируют опорное напряжение со стабильной частотой
U0(t) U0˙cos(ω0t + ϕ0), где U0, ω0, ϕ0 амплитуда, частота и начальная фаза опорного напряжения.
Перемножают опорное напряжение с отраженным фазоманипулированным сигналом
UΣ(t) U0(t) ˙U2(t) UΣ1˙cos[(ω0 + +ωi)t + ϕк(t) + ϕ0 + ϕi+Δ ϕ2] + UΣ1x
x cos[( ωi ω0)t + ϕк(t) + ϕi -ϕ0 +Δ ϕi] где UΣ1=  K1·Uo·U2
K1·Uo·U2
К1 коэффициент передачи перемножителя.
Фильтруют напряжение суммарной частоты
U3(t)=UΣ1˙cos[(ω0+ωi)t+
+ϕк(t)+ϕ0+ϕi+Δ ϕi] 0≅t≅Ti.
Перемножают напряжение суммарной частоты с зондирующим фазоманипулированным сигналом U1(t)
UΣ2(t)=U3(t)˙U1(t)=UΣ2x
xcos(ω0+ϕ0+Δ ϕi)+UΣ2x
xcos[(ω0+2 ωi)t+2 ϕк(t)+ϕ0+
+2 ϕi+Δ ϕi] где UΣ2=  K1·UΣ1·Uc
K1·UΣ1·Uc
Фильтруют напряжение разностей частоты
U4(t)=UΣ2˙cos(ω0+ϕ0+Δ ϕi).
Определяют величину разности фаз между напряжением разностной частоты и опорным напряжением, функцию зависимости величины разности фаз от номера i радиоимпульса и ее корреляционные характеристики.
По измеренным величинам судят о свойствах геологических тел и вмещающих пород.
Одновременно производят корреляционную обработку зондирующего U1(t) и отраженного U2(t) фазоманипулированных сигналов.
По максимальному значению корреляционной функции определяют время задержки τ0 отраженного фазоманипулированного сигнала по отношению к зондирующему фазоманипулированному сигналу.
По значению времени задержки τ0 судят о глубине залегания геологических тел.
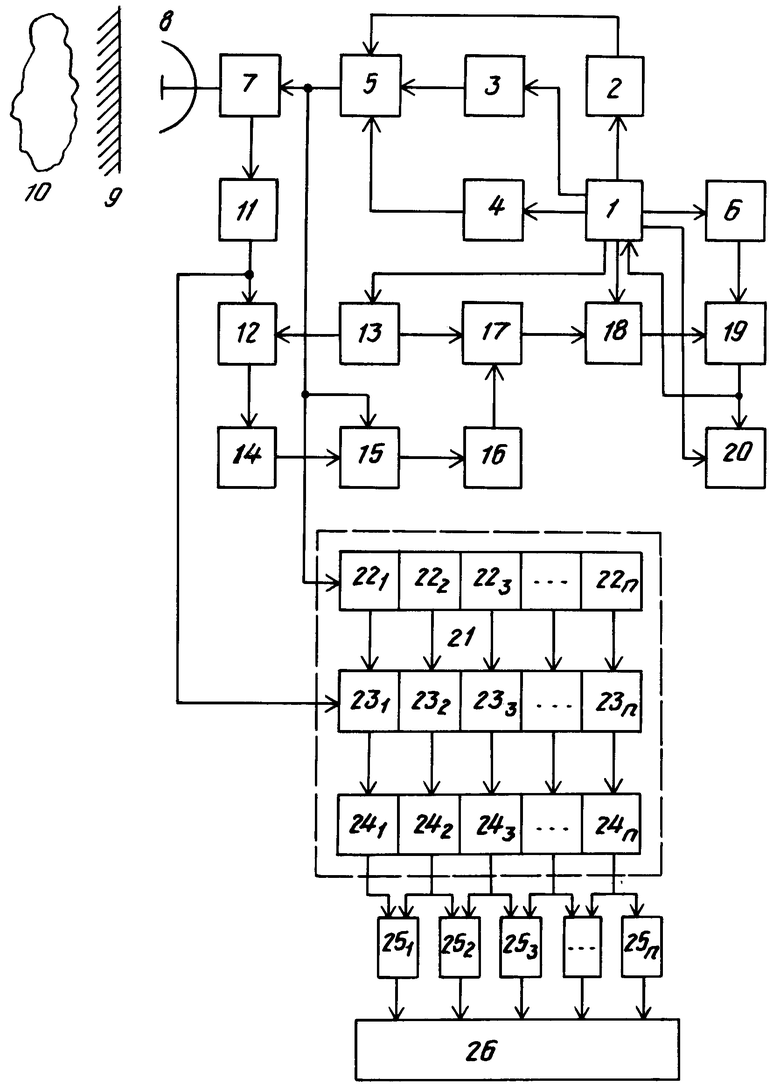
На чертеже представлена структурная схема устройства, реализующего предлагаемый способ.
Устройство содержит блок 1 управления, блок 2 формирования модулирующего кода, блок 3 изменения периода следования модулирующих импульсов, блок 4 изменения несущей частоты, передатчик 5, блок 6 памяти, антенный переключатель 7, антенну 8, исследуемую среду 9, исследуемый объект 10, приемник 11, первый перемножитель 12, блок 13 формирования опорного напряжения, фильтр 14 суммарной частоты, второй перемножитель 15, фильтр 16 разностной частоты, фазовый дискриминатор 17, аналого-цифровой преобразователь 18, коррелометр 19, первый блок 20 индикации, многоканальный коррелятор 21, многоотводную линию 22i задержки, многоканальный перемножитель 23i, многоканальный фильтр 24i нижних частот, компаратор 25i (i= 1, 2, n) и второй блок 26 индикации. К первому выходу блока 1 управления последовательно подключены блок 2 формирования модулирующего кода, передатчик 5, второй вход которого через блок 3 изменения периода следования модулирующих импульсов соединен с вторым выходом блока 1 управления, а третий через блок 4 изменения несущей частоты соединен с третьим выходом блока 1 управления, антенный переключатель 7 и антенна 8. К выходу антенного переключателя 7 последовательно подключены приемник 11, перемножитель 12, второй вход которого через блок 13 формирования опорного напряжения соединен с четвертым выходом блока 1 управления, фильтр 14 суммарной частоты, перемножитель 15, второй вход которого соединен с выходом передатчика 5, фильтр 16 разностной частоты, фазовый дискриминатор 17, второй вход которого соединен с вторым выходом блока 13 формирования опорного напряжения, аналого-цифровой преобразователь 18, вход которого соединен с пятым выходом блока 1 управления, коррелометр 19, второй вход которого через блок 6 памяти соединен с шестым выходом блока 1 управления, и блок 20 индикации, второй вход которого соединен с седьмым выходом блока 1 управления. К выходу передатчика 5 последовательно подключены многоканальный коррелятор 21, второй вход которого соединен с выходом приемника 11, компаратор 25i и блок 26 индикации. Управляющий вход блока 1 управления соединен с выходом коррелометра 19.
Устройство работает следующим образом.
С первого, второго и третьего выходов блока 1 управления импульсы синхронизации (фиг. 2а) подаются на входы блока 2 формирования модулирующего кода, блока 3 изменения периода следования модулирующих импульсов и блока 4 изменения несущей частоты, которые управляют работой передатчиков 5. Блок 2 формирует модулирующий код М(t) (фиг. 2в). Блок 3 изменения периода следования модулирующих импульсов запускает передатчик 5, который вырабатывает радиоимпульсы, несущая частота которых изменяется от радиоимпульса к радиоимпульсу по заданному закону с помощью блока 4 изменения несущей частоты. Сформированный модулирующий код М(t) с выхода блока 2 поступает на третий вход передатчика 5 и осуществляет манипуляцию фазы на 180о, формируя тем самым фазоманипулированный ФМн зондирующий сигнал U1(t) (фиг. 2д). Указанный сигнал через антенный переключатель 7 поступает на антенну 8 и излучается в направлении исследуемой среды 9. Зондирующий ФМн сигнал проходит через среду 9 и достигает исследуемого объекта 10, частично поглощающего его и частично отражающего в направлении приемопередающей антенны 8. Отраженный ФМн сигнал U2(t) с выхода антенны 8 через антенный переключатель 7 и приемник 11 поступает на первый вход перемножителя 12, на второй вход которого подается опорное напряжение U0(t) с выхода блока 13 формирования опорного напряжения. Последний запускается импульсами синхронизации с четвертого выхода блока 1 управления. На выходе перемножителя 12 образуется суммарное напряжение UΣ1(t), состоящее из напряжений суммарной и разностной частот. Фильтром 14 выделяется напряжение U3(t) только суммарной частоты. Это напряжение представляет собой ФМн сигнал на суммарной частоте ω0+ωi, который подается на второй вход перемножителя 15, на первый вход которого поступает зондирующий ФМнсигнал U1(t) с выхода передатчика 5. На выходе перемножителя 15 образуется суммарное напряжение UΣ2(t), состоящее из напряжений суммарной и разностной частот. Фильтром 16 выделяется напряжение U4(t) разностной частоты, которое представляет собой гармоническое колебание на частоте ω0 опорного напряжения. Это напряжение поступает на первый вход фазового дискриминатора 17, на второй вход которого подается опорное напряжение U0(t) с второго выхода блока 13 формирования опорного напряжения. В фазовом дискриминаторе 17 измеряется величина разности фаз Δ ϕi на стабильной частоте ω0 опорного напряжения. При следующем запуске передатчика 5 с другой частотой разность фаз, измеряемая фазовым дискриминатором 17, изменяется. Получающаяся при этом величина разности фаз преобразуется в аналого-цифровом преобразователе 18 в дискретную функцию и поступает на коррелометр 19. Величина изменения фазы отраженного сигнала при изменении длины волны от 100 до 400 м составляет, например, 9о и 2о для глины.
Информация для различных сред в виде сигнала, пропорционального величине изменения разности фаз, заложена в блоке 6 памяти и с частотой тактовых импульсов в виде дискретной функции статистических значений разности фаз подается на коррелометр 19. Коррелометр 19 определяет соответствие полученной величины разности фаз величине разности фаз, заложенной в блоке 6 памяти, и выдает сигнал останова для блока 1 управления и сигнал разрешения на индикацию результатов измерения в виде данных об исследуемом объекте.
Зондирующий ФМн сигнал U1(t) с выхода передатчика 5 и отраженный ФМн сигнал U2(t) с выхода приемника 11 поступают на два входа многоканального коррелятора 21, состоящего из многоотводной линии 22i задержки, многоканального перемножителя 23i и многоканального фильтра 24i нижних частот (i 1, 2, n). На выходе коррелятора 21 образуется напряжение, пропорциональное корреляционной функции R(τ), которое будет иметь максимальное значение при τ= τ0. С выходов коррелятора 21 напряжения соответствующих каналов поступают на входы компаратора 25i. Каждый i-й элемент компаратора 25i представляет собой аналоговый элемент сравнения, в котором сравниваются два напряжения: входное Uвх и опорное Uоп. В случае превышения входного напряжения над опорным (Uвх > Uоп) на выходе i-го элемента компаратора формируется напряжение, соответствующее логической "1". Напряжения с выходов многоканального коррелятора 21 подаются на элементы компаратора 25i таким образом, что на два соседних элемента подается одно и то же напряжение. Причем на один из элементов в качестве входного напряжения Uвх, а на другой опорного Uоп.
Следовательно, на выходах компаратора 25i образуется параллельный двоичный код, в котором "1" соответствует превышению напряжения в (i + 1)-м канале коррелятора 21 над напряжением в i-м канале. Последовательность единиц двоичного кода соответствует возрастанию корреляционной функции R(τ), а последовательность нулей соответствует спаду корреляционной функции. Таким образом, переход от последовательности единиц к последовательности нулей будет соответствовать максимуму корреляционной функции R(τ).
Подсчитав количество единиц двоичного кода m, можно определить номер канала, в котором τi τ0, а следовательно, и значение τ0, т.е. глубину залегания исследуемого объекта.
Таким образом, предлагаемый способ по сравнению с прототипом и другими аналогичными способами обеспечивает повышение помехоустойчивости и точности измерения. Это достигается использованием сложного фазоманипулированного сигнала, у которого произведение длительности Тiна ширину спектра Δfc значительно превышает длину (Тi˙Δfc >> 1), а корреляционная функция имеет один главный лепесток, значительно превышающий уровень боковых лепестков, что дает большие преимущества в смысле увеличения глубинности, улучшения разрешающей способности и повышения помехоустойчивости.
Кроме того, измерения величины разности фаз осуществляются на фиксированной частоте ω0 опорного напряжения. Поэтому нестабильность несущей частоты принимаемого ФМн сигнала, обусловленная различными факторами, не оказывает влияния на процесс измерения.
При использовании сложного фазоманипулированного сигнала обеспечивается повышение чувствительности.
Ширина спектра Δfc ФМн сигнала определяется длительностью τиэлементарных посылок ( Δfc=  ), тогда как ширина спектра Δf0 опорного напряжения U3(t) определяется его длительностью T
), тогда как ширина спектра Δf0 опорного напряжения U3(t) определяется его длительностью T fo=
fo=  , т.е. ширина спектра Δf0 опорного напряжения в N раз меньше ши- рины спектра Δfc ФМн сигнала (
, т.е. ширина спектра Δf0 опорного напряжения в N раз меньше ши- рины спектра Δfc ФМн сигнала (  N
N ).
).
Следовательно, при перемножении отраженного и зондирующего ФМнсигналов с опорным напряжением их спектр "сворачивается" в N раз. Это дает возможность с помощью узкополосной фильтрации выделить гармоническое колебания U3(t) со стабильной опорной частотой ω0, отфильтровав при этом значительную часть шумов и помех, т.е. повысить помехоустойчивость и чувствительность способа.
Используя свойство корреляционной функции ФМн сигнала, предлагаемый способ геоэлектроразведки обеспечивает повышение точности измерения глубины залегания геологических объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2010260C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ВИДА ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1991 |
|
RU2010435C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДЕЙСТВИЙ СПОРТСМЕНА НА ДИСТАНЦИИ | 1992 |
|
RU2031679C1 |
| ПЕЛЕНГАТОР | 1991 |
|
RU2010258C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1999 |
|
RU2158016C2 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005994C1 |
| УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ О ПАВОДКЕ ИЛИ СЕЛЕ | 1992 |
|
RU2039066C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2033353C1 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1991 |
|
RU2010244C1 |
Использование: в геофизике, в частности в способе электроразведки с использованием волн высокой частоты, а также для обнаружения подповерхностных объектов, например рудных месторождений. Сущность изобретения: способ предусматривает возбуждение многочастотного зондирующего сигнала и изменение частоты несущей от радиоимпульса к радиоимпульсу последовательно по заданному закону. Зондирующий сигнал перед излучением манипулируют по фазе на 180°. Излучают зондирующий фазоманипулированный сигнал, принимают отраженный фазоманипулированный сигнал. Преобразуют его по частоте и выделяют напряжение промежуточной (разносторонней) частоты. Перемножают сигнал с зондирующим фазоманипулированным сигналом. Из полученного результрующего колебания выделяют гармоническое напряжение. Измеряют разность фаз между гармоническим напряжением и напряжением гетеродина, а также функцию зависимости величины разности фаз от номера радиоимпульса и ее корреляционной характеристики. По измеренным величинам судят о свойствах геологических тел вмещающих пород. Одновременно производят корреляционную обработку зондирующего и отраженного фазоманипулированных сигналов. По максимальному значению корреляционной функции определяют время задержки отраженного сигнала по отношению к зондирующему сигналу. По значению времени задержки судят о глубине залегания геологических тел. 1 ил.
СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ, основанный на формировании последовательности радиоимпульсов с заданными периодом, длительностью и формой модулирующего импульса, изменении частоты несущей от радиоимпульса к радиоимпульсу последовательно по заданному закону, приеме отраженной последовательности радиоимпульсов, определении величины разности фаз по отношению к зондирующему сигналу, функции зависимости величины разности фаз от номера радиоимпульса, ее корреляционных характеристик, по которым судят о свойствах геологических тел и вмещающих пород, отличающийся тем, что для формирования зондирующего сигнала выполняют фазовую манипуляцию на 180o последовательности радиоимпульсов, при этом для определения величины разности фаз формируют опорное напряжение со стабильной частотой, перемножают его с отраженным фазоманипулированным сигналом, фильтруют напряжение суммарной частоты, перемножают его с зондирующим фазоманипулированным сигналом, фильтруют напряжение разностной частоты и сравнивают его по фазе с опорным напряжением, одновременно производят корреляционную обработку зондирующего и отраженного фазоманипулированных сигналов и по максимальному значению корреляционной функции определяют время задержки отраженного фазоманипулированного сигнала по отношению к зондирующему фазоманипулированному сигналу, по значению которого судят о глубине залегания геологических объектов.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ геоэлектроразведки | 1984 |
|
SU1193622A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
