Изобретение относится к устройствам для абразивной обработки и чистки поверхностей и может быть выполнено в виде переносного или ручного инструмента.
Известно устройство для обработки и чистки поверхностей, содержащее станину или корпус, индивидуальный силовой привод в виде электродвигателя, на валу которого установлен абразивный круг (Краткий политехнический словарь. Госиздательство технико-теоретической литературы. М; 1955, с.960);
Известно также устройство для обработки и чистки поверхностей, содержащее станину или корпус, силовой привод, вал которого кинематически связан с коаксиальными валами, несущими абразивные инструменты в виде абразивного круга, диска или головки [1]
Недостатком этого устройство является то, что вращающийся абразивный инструмент при взаимодействии с обрабатываемой поверхностью передает на все устройство реактивный вращающий момент, что приводит к быстрой утомляемости работника при использовании этого устройства в виде ручного инструмента, ограничивает мощность применяемого силового привода и снижает производительность труда, а также приводит к засорению окружающей среды частицами обрабатываемого материала.
Цель изобретения улучшение эксплуатационных характеристик, связанных с удобством и безопасностью использования устройства, обеспечение возможности применения более мощного силового привода и повышение за счет этого производительности труда, а также уменьшение засорения окружающей среды.
Устройство для абразивной обработки и чистки поверхностей содержит корпус, силовой привод и связанный с ним абразивный инструмент в виде круга или диска с торцовыми рабочими поверхностями, при этом вал силового привода связан с ведущим центральным колесом дифференциального механизма, который содержит два коаксиально установленных ведомых вала, на которых закреплены ведомые колеса, находящиеся в зацеплении с внутренними сателлитами, входящими в блоки с внешними сателлитами, находящимися в зацеплении с ведущим центральным колесом, блоки сателлитов установлены с возможностью свободного вращения на осях водила, установленного с возможностью свободного вращения соосно с центральным ведущим и ведомыми колесами, на каждом из ведомых валов установлен абразивный инструмент, при этом второй из них выполнен в виде плоского кольца, размещенного с первым круглым абразивным инструментом.
Абразивные инструменты с боков закрыты концентрической относительно них кольцевой камерой, имеющей кольцевую щель, обращенную в сторону абразивных инструментов.
Абразивные инструменты выступают перед кольцевой камерой, и каждый из них связан со своим ведомым валом с помощью плоских пружин с возможностью упругого перемещения в осевом направлении в сторону корпуса устройства и расположения при этом в одной плоскости друг с другом и с внешней торцовой поверхностью кольцевой камеры.
Плоские пружины закреплены радиально на соответствующих ведомых валах, расположены в перпендикулярных к этим валам плоскостях и на их концах имеются отверстия, в которые с люфтом в радиальном направлении входят закрепленные на тыльной стороне абразивных инструментов шипы, при этом величина люфта равна изменению радиального размера пружины при ее изгибе и выпрямлении.
На концах шипов имеются головки, выполненные с возможностью вхождения без зазоров в отверстия на концах пружин при их наибольшем радиусе в выпрямленном положении.
Плоские пружины выполнены съемными с возможностью их замены, при этом сменяемые комплекты пружин обладают различной упругостью.
На ручке устройства установлен нажимной выключатель, а на кольцевой камере обращенные в осевом направлении концевые выключатели электродвигателя силового привода с последовательным соединением этих выключателей в электрической цепи электродвигателя.
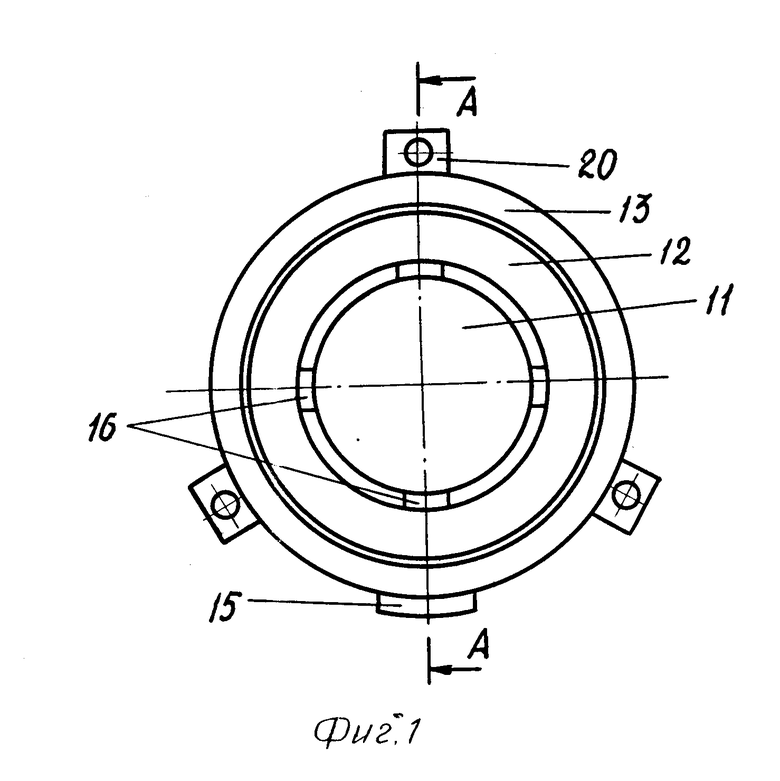
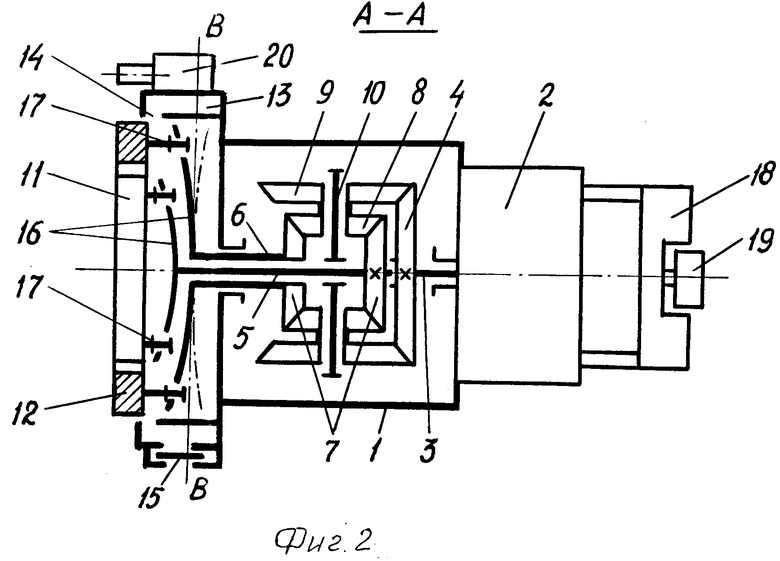
На фиг. 1 показано предлагаемое устройство; на фиг. 2 разрез А-А на фиг. 1.
Устройство для абразивной обработки и чистки поверхностей содержит корпус 1, силовой привод в виде электродвигателя 2, на валу 3 которого закреплено ведущее центральное колесо 4 дифференциального механизма, который содержит два коаксиально установленных ведомых вала внутренний 5 и внешний 6, на которых закреплены ведомые колеса 7, находящиеся в зацеплении с внутренними сателлитами 8, входящими в блоки с внешними сателлитами 9, находящимися в зацеплении с ведущим центральным колесом 4. Блоки сателлитов 8, 9 установлены с возможностью свободного вращения на осях 10 водила, которое установлено соосно с центральным ведущим и ведомым колесами с возможностью свободного вращения, в данном случае на внутреннем ведомом валу 5. На внутреннем ведомом валу установлен абразивной инструмент в виде круга 11, а на внешнем ведомом валу 6 в виде плоского кольца 12, концентрического круглому абразивному инструменту 11. Абразивные инструменты с боков закрыты концентрической относительно них кольцевой камерой 13 для сбора частиц обрабатываемого материала, для чего в ней выполнена кольцевая щель 14, обращенная в сторону абразивных инструментов. В стенке камеры имеется окно для удаления собранных частиц и пыли, закрываемое дверцей или заслонкой 15.
Абразивные инструменты во внерабочем положении выступают перед кольцевой камерой 13, и каждый из них связан со своим ведомым валом 5, 6 при помощи плоских пружин 16 с возможностью упругого перемещения в осевом направлении в сторону корпуса 1 устройства и расположения при этом в одной плоскости друг с другом и с внешней круговой торцовой поверхностью кольцевой камеры 13. Пружины закреплены радиально на своих ведомых валах, расположены в перпендикулярных к этим валам плоскостях и на их концах имеются отверстия, в которые с люфтом в радиальном направлении входят закрепленные на тыльной стороне абразивных инструментом шипы 17, при этом величина люфта равна изменению радиального размера пружины при ее изгибе и выпрямлении. На концах шипов 17 имеются головки, заполненные с возможностью вхождения в отверстия на концах пружин при их наибольшем радиусе в выпрямленном положении, которое для пружины внешнего ведомого вала 6 (фиг. 2) совпадает с прямой тонкой штрих-пунктирной линией В-В, при этом крайнее положение этой пружины при осевом сдвиге абразивного инструмента 12 показано искривленной утолщенной ширих-пунктирной линией. В целях упрощения графического изображения эти штрих-пунктирные линии для пружин, связанных с внутренним ведомым валом 5, не показаны.
Пружины 16 выполнены съемными с ведомых валов 5, 6 с возможностью их замены, при этом сменяемые комплекты пружин обладают различной упругостью.
На ручке 18 устройства установлен нажимной выключатель 19, а на кольцевой камере 13 обращенные в осевом направлении концевые выключатели 20 электродвигателя с последовательным соединением этих выключателей в электрической цепи электродвигателя.
Устройство для абразивной обработки и чистки поверхностей работает следующим образом.
Для приведения в действие устройства абразивные инструменты 11, 12 прижимают к обрабатываемой поверхности и, преодолевая упругость плоских пружин 16, перемешают их в осевом направлении до упора торцовой поверхности кольцевой камеры 13 в эту обрабатываемую поверхность. При этом за счет воздействия на нажимной выключатель 19 и концевые выключатели 20 происходит включение электродвигателя 2, вместе с тем полость кольцевой камеры 13 изолируется от окружающей среды, что уменьшает возможность ее загрязнения частицами обрабатываемой поверхности и одновременно обеспечивается безопасность в проведении работ, поскольку при возникновении зазора между торцовой поверхностью кольцевой камеры 13 и обрабатываемой поверхностью или при прекращении удержания устройства при помощи ручки 18 срабатывают концевые 20 и/или нажимной 19 выключатели, прекращающие работу электродвигателя и вращение абразивных инструментов. При работающем двигателе 2 вращательное движение и вращающий момент от его вала 3, ведущее центральное колесо 4 дифференциального механизма, внешние 9 и внутренние 8 сателлиты, ведомые колеса 7, внутренний 5 и внешний 6 ведомые валы и плоские пружины 16 передаются на абразивные инструменты 11, 12, прижатые к обрабатываемой поверхности. Вращение и передача вращающего момента на круглый 11 и плоский кольцевой 12 абразивные инструменты происходит в противоположных направлениях благодаря тому, что ведомые колеса 7 установлены по разную сторону от внутренних сателлитов 8. Возможность вращения ведомых валов с частотами, величина которых находится в обратной зависимости друг от друга, обусловлена возможностью свободного вращения водила 10 с блоками сателлитов 8, 9 вокруг оси устройства в обоих направлениях. Равенство абсолютных значений вращающих моментов на обоих ведомых валах обеспечивается тем, что ведомые колеса 7 служат опорами друг для друга при восприятии и передаче вращающего момента через сателлиты и водило. При этом разная частота вращения абразивных инструментов 11, 12 возможна при взаимодействии их с поверхностью разной шероховатости, при совмещении с неровностями, уступами поверхности и др. В связи с вращением абразивных инструментов в противоположных направлениях передаваемые ими на корпус 1 при взаимодействии с обрабатываемой поверхностью реактивные вращающие моменты также равны по величине и направлены в противоположные стороны, поэтому они уравновешивают друг друга, и корпус не воспринимает никаких вращающих моментов, что обеспечивает достижение одной из основных целей изобретения. Снимаемые абразивным инструментом частицы обрабатываемого материала под действием центробежных сил отбрасываются в сторону от оси вращения и через кольцевую щель 14 направляются в полость кольцевой камеры 13, откуда они периодически удаляются через окно, закрываемое дверцей или задвижкой 15. Этим обеспечивается защита окружающей среды от загрязнения.
Съем абразивных инструментов 11, 12 с плоских пружин 16 и установка их на пружины возможны только при их выпрямлении вдоль тонкой штрих-пунктирной линии В-В (фиг. 2), когда головки шипов 17 совмещаются с отвеpстиями на концах пружин. В любом ином положении закраины головок не позволяют шипам выходить из отверстий, что обеспечивает надежное крепление абразивных инструментов во внерабочем положении и во время работы.
Плоские пружины 16 удерживаются на своих ведомых валах 5, 6 при помощи втулок со шлицевым соединением, что позволяет производить их замену. Применение пружин с разной упругостью обеспечивает неизменное во время работы и необходимое для данного вида работ давление абразивных инструментов на обрабатываемую поверхность, поскольку упругое перемещение абразивных инструментов в осевом направлении ограничено плоскостью, совмещенной с торцовой круговой поверхностью кольцевой камеры 13.
Данное устройство позволяет применять разные абразивные инструменты по их твердости, шероховатости и др. что дает возможность выполнять различные виды абразивной обработки поверхностей (соскабливание, выравнивание, шлифование, полирование и др.).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АБРАЗИВНОЙ ОБРАБОТКИ И ЧИСТКИ ПОВЕРХНОСТЕЙ | 1993 |
|
RU2046693C1 |
| УСТРОЙСТВО ДЛЯ АБРАЗИВНОЙ ОБРАБОТКИ И ЧИСТКИ ПОВЕРХНОСТЕЙ | 1993 |
|
RU2046694C1 |
| РЕВЕРСИВНЫЙ ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ВАРИАТОР | 1993 |
|
RU2068134C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2001 |
|
RU2185553C2 |
| СПОСОБ ПОЛЕТА В ВОЗДУХЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2177898C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174204C2 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174202C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
Использование: обработка и чистка поверхностей. Сущность изобретения: на валу двигателя закреплено ведущее центральное колесо дифференциального механизма, находящегося в зацеплении с внешними сателлитами, входящими в блоки с внутренними сателлитами, которые находятся в зацеплении с ведомыми колесами (ВК), установленными на коаксиально размещенных ведомых валах (ВВ), каждый из которых при помощи плоских пружин несет абразивный инструмент (АИ) в виде круга или плоского кольца. Водило блоков сателлитов установлено с возможностью свободного вращения, что в сочетании с установкой ВК по обе стороны внутреннего сателлита обеспечивает вращение ВВ в противоположных направлениях, не допускает передачу на корпус реактивных вращающихся моментов и создает удобство в работе. Частицы обрабатываемой поверхности направляются через кольцевую щель в кольцевую камеру. Включение и отключение двигателя осуществляется при помощи нажимного и концевого выключателей. Давление АИ на обрабатываемую поверхность регулируется упругостью плоских пружин, которые устанавливаются с возможностью их замены. 6 з.п.ф-лы, 2 ил.
| 0 |
|
SU319450A1 | |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
