Изобретение относится к летательным аппаратам тяжелее воздуха с вертикальным взлетом и посадкой, в частности к способам создания подъемной силы у летательного аппарата с использованием мощности двигателя и к устройствам, осуществляющим этот способ полета. Изобретение может быть использовано при транспортировке различных грузов и при выполнении работ, при которых не допускается создания направленного вниз воздушного потока в пространстве ниже летательного аппарата и его ненесущей аэродинамической поверхности.
Известен способ полета в воздухе, применяемый в вертолетах, заключающийся в том, что используют несущий винт, который вращают в горизонтальной плоскости, направляют вниз созданный несущим винтом поток воздуха и за счет этого создают подъемную силу ("Политехнический словарь" под ред. академика А. Ю. Ишлинского, изд. "Советская энциклопедия", М. - 1980, стр. 75, 76).
Наиболее близким по совокупности признаков является способ полета в воздухе, применяемый в устройстве для создания подъемной силы, при котором используют круглую в плане горизонтальную неподвижную плоскую аэродинамическую поверхность, являющуюся несущей плоскостью, над которой с помощью струи газа от реактивного двигателя создают газовоздушный поток, который направляют горизонтально от центра аэродинамической поверхности равномерно во все стороны таким образом, что газовоздушный поток вводят в соприкосновение с аэродинамической поверхностью только в периферийной ее части и за счет этого над больший частью этой поверхности вокруг ее центра между газовоздушным потоком и аэродинамической поверхностью создают замкнутый объем с пониженным давлением, а над газовоздушным потоком образуют направленный вниз поток воздуха путем его эжектирования указанным горизонтальным газовоздушным потоком и за счет этого создают подъемную силу, используемую для полета в воздухе (патент США 5031859, кл. В 64 С 29/00, 1991).
Недостатком этого способа полета в воздухе является возможность его осуществления только при использовании реактивного двигателя, что сужает область его применения, в частности, при создании легких летательных аппаратов с двигателями внутреннего сгорания.
Известен летательный аппарат тяжелее воздуха с вертикальным взлетом и посадкой, содержащий неподвижную несущую аэродинамическую поверхность, кольцевое крыло вокруг этой несущей поверхности и реактивный двигатель с сопловым аппаратом, имеющим кольцевую щель для выхода газа в средней части несущей поверхности, причем неподвижная несущая аэродинамическая поверхность выполнена в виде круглой в плане выпуклой вверх поверхности, а отдельные участки кольцевого крыла, в том числе обращенные вперед, назад и в стороны от соплового аппарата, снабжены средствами механизации крыла в виде закрылок, расположенных вместе с крылом в струе газа, вытекающего из соплового аппарата реактивного двигателя, и имеющих отдельные органы управления для разных закрылок, обеспечивающих независимую друг от друга работу этих элементов механизации крыла (патент США 2547266, кл. 244-12, 1951).
Наиболее близким по совокупности признаков техническим решением к заявленному изобретению по способу и устройству является устройство для создания подъемной силы, содержащее установленные на корпусе круглую в плане плоскую горизонтальную неподвижную аэродинамическую поверхность, которая является несущей плоскостью, реактивный двигатель, сопловый аппарат которого выполнен с кольцевой щелью, размещенной с уступом над средней частью упомянутой плоскости так, что круговая горизонтально направленная газовоздушная струя входит в соприкосновение с упомянутой несущей плоскостью только в периферийной ее части, при этом между несущей плоскостью и газовоздушной струей создается замкнутый объем с пониженным давлением, а над газовоздушной струей образуется направленный вниз ускоренный поток воздуха в связи с его эжектированием указанной газовоздушной струей из окружающего пространства и за счет этого создается подъемная сила, используемая для полета в воздухе (патент США 5031859, кл. В 64 С 29/00, 1991).
Это устройство для создания подъемной силы у летательного аппарата осуществимо только при использовании его совместно с реактивным двигателем, что затрудняет его применение при создании легких летательных аппаратов, использующих широко распространенные двигатели внутреннего сгорания.
Предлагаемое изобретение по способу полета в воздухе и устройству для его осуществления в виде летательного аппарата обеспечивает достижение технического результата, который заключается в том, что при осуществлении данного способа и создании летательного аппарата, осуществляющего этот способ, возможно использование любых двигателей с вращающимся выходным валом, передающим вращающий момент, в том числе газовых турбин, турбовинтовых двигателей, двигателей внутреннего сгорания.
При этом исключают возможность создания направленного вниз воздушного потока в пространстве ниже летательного аппарата и его несущей аэродинамической поверхности.
Указанный технический результат по способу полета в воздухе с обеспечением возможности создания подъемной силы и осуществления вертикального взлета и посадки достигается тем, что используют круглую в плане плоскую горизонтальную неподвижную аэродинамическую поверхность, являющуюся несущей плоскостью, и над ней создают воздушный поток, который направляют горизонтально равномерно во все стороны таким образом, что воздушный поток вводят в соприкосновение с аэродинамической поверхностью только в периферийной ее части. За счет этого над большей частью указанной поверхности вокруг ее центра между воздушным потоком и аэродинамической поверхностью создают замкнутый объем с пониженным давлением, а над воздушным потоком образуют направленный вниз поток воздуха путем его эжектирования указанным воздушным потоком и при этом создают подъемную силу, используемую для полета в воздухе.
Согласно изобретению горизонтально направленный над аэродинамической поверхностью равномерно во все стороны в радиальных направлениях от ее центра воздушный поток создают путем использования центробежных сил. Для этого применяют два соосно установленных на разных уровнях ротора с горизонтальными лопастями, которые при помощи двигателя через трансмиссию приводят во вращение в противоположных направлениях, передают на них равные по величине и противоположно направленные вращающие моменты при любых режимах вращения каждого из роторов. За счет этого не допускают передачу от роторов на корпус летательного аппарата реактивного вращающего момента и предотвращают повороты летательного аппарата при вращении роторов. Помимо создания радиального горизонтально направленного воздушного потока, над аэродинамической поверхностью указанные роторы используют в качестве центробежных вентиляторов и с их помощью понижают давление воздуха в замкнутом объеме между лопастями роторов и аэродинамической поверхностью, а также образуют направленный вниз поток воздуха над лопастями роторов и аэродинамической поверхностью. При этом создают подъемную силу, используемую для полета летательного аппарата.
Летательный аппарат, обладающий способностью вертикального взлета и посадки, содержит установленную на корпусе летательного аппарата круглую в плане плоскую горизонтальную неподвижную аэродинамическую поверхность, которая является несущей плоскостью. В центре несущей плоскости и с уступом над ней размещено устройство для создания горизонтального радиально направленного над несущей плоскостью воздушного потока, который входит в соприкосновение с несущей плоскостью только в круговой периферийной ее части с образованием над большей частью несущей плоскости вокруг ее центра между воздушным потоком и несущей плоскостью замкнутого объема с пониженным давлением воздуха. Указанный горизонтальный воздушный поток создает над несущей плоскостью направленный вниз ускоренный поток воздуха путем его эжектирования из окружающего пространства.
Согласно изобретению устройство для создания горизонтального радиально направленного над несущей плоскостью воздушного потока у описываемого летательного аппарата выполнено в виде двух соосных роторов, верхнего и нижнего, снабженных горизонтальными лопастями и размещенных на соосных коаксиальных вертикальных валах на разных уровнях над несущей плоскостью.
Роторы через трансмиссию связаны с двигателем, установленным под несущей плоскостью, и взаимодействуют с окружающим воздухом подобно центробежным вентиляторам с забором воздуха как над роторами, так и из-под роторов.
Трансмиссия роторов выполнена с двумя коаксиально размещенными валами, на внутреннем из которых установлен верхний ротор, а на внешнем полом валу установлен нижний ротор и на эти валы трансмиссией передаются противоположно направленные и равные по величине вращающие моменты при любых режимах вращения роторов.
Указанные роторы размещены таким образом, что между их лопастями и несущей плоскостью остается не занятый лопастями объем.
По окружности периферийной части несущей плоскости установлены аэродинамические элементы управления полетом летательного аппарата.
Ниже и вокруг несущей плоскости установлена перегородка с цилиндрической поверхностью, верхняя круговая кромка которой примыкает непосредственно к круговой периферийной части несущей плоскости, при этом указанная перегородка предназначена для отделения сошедшего с несущей плоскости воздушного потока от пространства под несущей плоскостью, исключает эжектирование воздуха из-под упомянутой плоскости указанным воздушным потоком и устраняет возможность связанного с этим уменьшения подъемной силы, воздействующей на несущую плоскость.
Летательный аппарат снабжен размещенными в воздушном потоке вертикальными аэродинамическими пластинами воздушных рулей, которые установлены в периферийной части несущей плоскости на вертикальных осях симметрично относительно центра упомянутой плоскости с возможностью независимого друг от друга управляемого поворота на своих осях.
Отдельные участки периферийной части несущей плоскости выполнены в виде установленных на горизонтальных осях закрылков, размещенных под созданным роторами горизонтальным воздушным потоком. Указанные закрылки имеют отдельные органы управления и обеспечивают отклонение вниз или вверх части воздушного потока после прохождения над несущей плоскостью путем соответствующего поворота упомянутых закрылков.
Трансмиссия роторов летательного аппарата выполнена в виде дифференциального механизма, составленного из конических зубчатых колес. Сателлиты установлены на радиальных осях водила и выполнены в виде блока двух колес, внешних и внутренних относительно оси дифференциального механизма. Внешние колеса сателлитов введены в зацепление с центральным ведущим колесом, закрепленным на валу двигателя, а внутренние колеса сателлитов находятся в зацеплении с ведомыми центральными колесами, каждое из которых закреплено на соответствующем одном из коаксиальных валов роторов летательного аппарата и эти центральные колеса размещены по разные стороны от водила дифференциального механизма. Само водило установлено с возможностью свободного вращения на валу одного из ведомых центральных колес, который является внутренним валом коаксиальных валов роторов летательного аппарата.
Верхний ротор летательного аппарата имеет меньший диаметр по сравнению с диаметром нижнего ротора с лопастями, что уменьшает аэродинамическое сопротивление вращению указанных роторов в противоположных направлениях.
Нижний ротор снабжен ободом, к внешней стороне которого прикреплены лопасти ротора, а пространство внутри обода является замкнутым объемом с пониженным давлением воздуха. Создание этого замкнутого объема обеспечивается также выполнением связи указанного обода с внешним полым валом трансмиссии с применением стержней в виде спиц со свободным пространством между этими спицами. При этом указанный замкнутый объем ограничивается сверху только лопастями роторов.
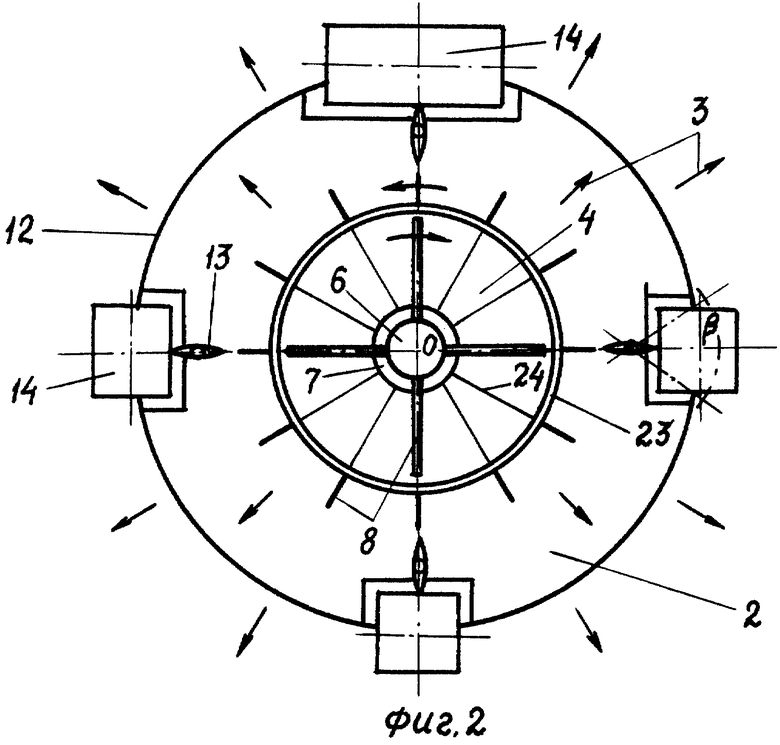
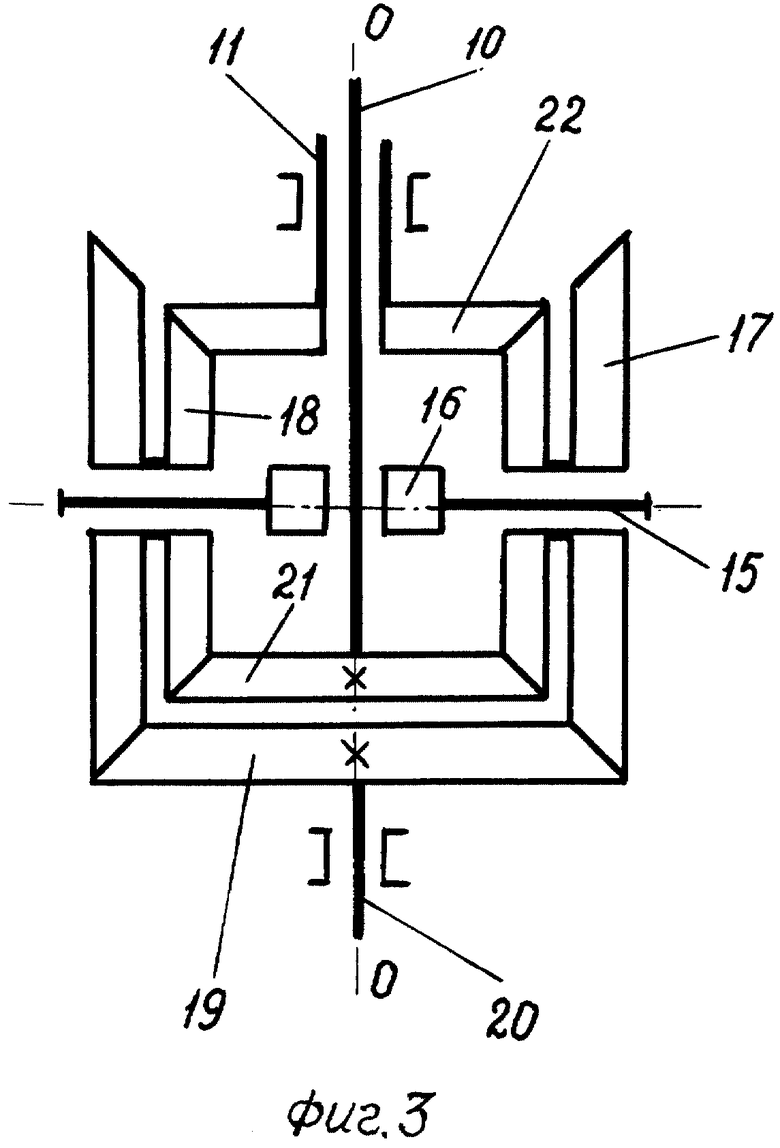
На фиг. 1, 2 и 3 показано в общем виде (на фиг. 1 и 2 в двух проекциях) устройство летательного аппарата с вертикальным взлетом и посадкой. На фиг. 1 летательный аппарат дан в разрезе фронтальной плоскостью. Короткими стрелками и более толстыми линиями показано направление созданного роторами воздушного потока, а длинными стрелками с тонкими линиями - направление потока воздуха, захваченного роторами и эжектируемого из окружающего пространства упомянутым горизонтальным воздушным потоком. Эти же чертежи иллюстрируют способ полета в воздухе с возможностью вертикального взлета и посадки. На фиг. 3 показано устройство трансмиссии роторов летательного аппарата, обеспечивающей возможность вращения роторов в противоположных направлениях с равными по величине вращающими моментами.
Описание способа полета в воздухе с созданием подъемной силы, обеспечивающей возможность вертикального взлета и посадки, дается на примере работы летательного аппарата с вертикальным взлетом и посадкой, устройство которого приведено ниже.
Летательный аппарат (см. фиг. 1, 2 и 3), обладающий способностью вертикального взлета и посадки, содержит установленную на корпусе 1 летательного аппарата круглую в плане плоскую горизонтальную неподвижную аэродинамическую поверхность, которая является несущей плоскостью 2. В центре О несущей плоскости и с уступом над ней размещено устройство для создания горизонтального радиально направленного над несущей плоскостью 2 воздушного потока 3, который входит в соприкосновение с несущей плоскостью только в круговой периферийной ее части с образованием над большей частью несущей плоскости вокруг ее центра 0 между воздушным потоком 3 и несущей плоскостью 2 замкнутого объема 4 с пониженным давлением воздуха. Указанный горизонтальный воздушный поток 3 создает над несущей плоскостью направленный вниз ускоренный поток воздуха 5 путем его эжектирования из окружающего пространства.
Устройство для создания горизонтального радиально направленного над несущей плоскостью воздушного потока у описываемого летательного аппарата выполнено в виде двух соосных роторов - верхнего 6 и нижнего 7, снабженных горизонтальными лопастями 8 и размещенных на коаксиальных вертикальных валах на разных уровнях над несущей плоскостью. Роторы 6, 7 через трансмиссию связаны с двигателем 9, установленным под несущей плоскостью, и взаимодействуют с окружающим воздухом подобно центробежным вентиляторам с забором воздуха как над роторами, так и из-под роторов.
Трансмиссия роторов выполнена с двумя коаксиально размещенными валами 10, 11, на внутреннем 10 из которых установлен верхний ротор 6, а на внешнем полом валу 11 установлен нижний ротор 7, и на эти валы трансмиссией передаются противоположно направленные и равные по абсолютной величине вращающие моменты при любых режимах вращения роторов.
Указанные роторы размещены таким образом, что между их лопастями 8 и верхней поверхностью несущей плоскости 2 остается не занятый лопастями объем 4, в котором при вращении роторов создается пониженное давление воздуха. Указанный замкнутый объем 4 с пониженным давлением воздуха сверху ограничен только лопастями 8 роторов 6, 7.
По окружности периферийной части несущей плоскости установлены аэродинамические элементы управления полетом летательного аппарата.
Ниже и вокруг несущей плоскости 2 установлена перегородка 12 с цилиндрической поверхностью, верхняя круговая кромка которой примыкает непосредственно к круговой периферийной части несущей плоскости 2. Указанная перегородка предназначена для отделения сошедшего с несущей плоскости воздушного потока от пространства под несущей плоскостью, исключает эжектирование воздуха из-под упомянутой несущей плоскости указанным воздушным потоком и устраняет возможность связанного с этим уменьшения подъемной силы, воздействующей на несущую плоскость.
Летательный аппарат снабжен размещенными в воздушном потоке 3 вертикальными аэродинамическими пластинами воздушных рулей 13, которые установлены в периферийной части несущей плоскости на вертикальных осях симметрично относительно центра 0 несущей плоскости с возможностью независимого друг от друга управляемого поворота на своих осях.
Отдельные участки периферийной части несущей плоскости 2 выполнены в виде установленных на горизонтальных осях закрылков 14, размещенных под созданным роторами горизонтальным потоком 3. Указанные закрылки имеют отдельные органы управления и обеспечивают отклонение вниз или вверх части воздушного потока 3 после прохождения над несущей плоскостью путем соответствующего поворота этих закрылков.
Трансмиссия (фиг. 3) роторов 6, 7 летательного аппарата выполнена в виде дифференциального механизма, составленного из конических зубчатых колес. Сателлиты этого дифференциального механизма установлены на радиальных осях 15 водила 16 и выполнены в виде блока двух конических зубчатых колес - внешних 17 и внутренних 18 относительно оси 0-0 дифференциального механизма. Внешние колеса 17 сателлитов введены в зацепление с центральным ведущим колесом 19, закрепленным на валу 20 двигателя. Внутренние колеса 18 сателлитов находятся в зацеплении с ведомыми центральными колесами 21, 22. Первое из указанных ведомых колес 21 закреплено на внутреннем коаксиальном валу 10, на котором установлен верхний ротор 6 летательного аппарата. Второе из упомянутых ведомых колес 22 закреплено на внешнем коаксиальном валу 11, на котором установлен нижний ротор 7 летательного аппарата. Ведомые центральные колеса 21, 22 размещены по разные стороны от водила 16 дифференциального механизма, а само водило 16 установлено с возможностью свободного вращения на внутреннем валу 10 из пары коаксиальных валов, на котором закреплено первое ведомое колесо 21 дифференциального механизма.
Верхний ротор 6 летательного аппарата с лопастями 8 имеет меньший диаметр по сравнению с диаметром нижнего ротора 7 с его лопастями 8. Это способствует уменьшению аэродинамического сопротивления вращению указанных роторов в противоположных направлениях в связи с отсутствием непосредственного взаимодействия потоков воздуха, сходящего с лопастей 8 этих роторов в направлениях, касательных к окружностям их вращения в противоположных направлениях.
Нижний ротор 7 снабжен ободом 23, к внешней стороне которого прикреплены лопасти 8 ротора. Пространство внутри этого обода является замкнутым объемом 4 с пониженным давлением воздуха. Создание этого замкнутого объема обеспечивается также выполнением связи указанного обода с внешним полым валом трансмиссии роторов с применением стержней в виде спиц 24 со свободным пространством между этими спицами. При этом указанный замкнутый объем ограничивается сверху только лопастями роторов.
Способ полета в воздухе с помощью приведенного выше летательного аппарата осуществляется следующим образом.
При вращении вала 20 двигателя 9 летательного аппарата вращающий момент и вращение передаются на центральное ведущее колесо 19, которое приводит во вращение находящиеся с ним в зацеплении внешние колеса 17 блоке сателлитов и сблокированные с внешними колесами внутренние колеса 18 этого блока сателлитов, которые находятся в зацеплении с ведомыми центральными колесами 21, 22, закрепленными соответственно на внутреннем 10 и полом внешнем 11 коаксиальных валах. В связи с расположением ведомых колес 21, 22 по разные стороны от блока сателлитов 17, 18 эти ведомые колеса с закрепленными с ними соответствующими валами 10, 11 совершают вращение в противоположных относительно друг друга направлениях. Соответственно и роторы 6, 7 летательного аппарата вращаются в противоположных направлениях. Известно, что на оба ведомые колеса симметричного дифференциального механизма передаются одинаковые по величине вращающие моменты. Соответственно, и вращающий момент на роторах 6, 7 летательного аппарата будет всегда одинаков по абсолютной величине, но направлен в противоположные по окружности стороны. Вращение роторов в противоположных направлениях с одинаковыми по абсолютной величине вращающими моментами исключает возможность передачи на корпус 1 летательного аппарата вращающего момента и обеспечивает стабильное положение летательного аппарата независимо от характера вращения роторов.
При вращении роторов 6, 7 их горизонтальные лопасти 8 придают ускорение соприкасающемуся с ними воздуху и увлекают его в исправлениях от центра 0 несущей плоскости 2 с созданием горизонтального воздушного потока 3. Этот воздух увлекается из-под лопастей роторов и из пространства над этими лопастями. В результате в замкнутом объеме 4 между лопастями 8 роторов и верхней поверхностью несущей плоскости 2 давление воздуха понижается, и это приводит к тому, что со стороны окружающего неподвижного воздуха на нижнюю поверхность несущей плоскости 2 оказывается давление Р снизу вверх как разность величин давлений под и над несущей плоскостью, создающая подъемную силу F.
Вместе с тем, вращающиеся роторы 6, 7 с горизонтальными лопастями 8 увлекают воздух из пространства над несущей плоскостью 2 в горизонтальном направлении вдоль этой несущей плоскости и создают ускоренный сверху вниз поток воздуха 5 над несущей плоскостью из окружающего пространства. Созданию этого вертикально направленного потока воздуха помимо непосредственно лопастей роторов способствует также эжектирование воздуха из окружающего пространства горизонтальным воздушным потоком 3, созданным лопастями 8 роторов 6, 7.
Известно, что ускорение любой массы происходит только под действием силы. Следовательно, ускоренный поток воздуха 5 над несущей плоскостью 2 создается под действием силы, воздействующей на массу этого воздуха в направлении его ускорения, т. е. в направлении сверху вниз. Согласно третьему закону Ньютона любая сила проявляется только при наличии противодействующей равной по величине и противоположно направленной силы. Этой силой является воздействующая на несущую плоскость 2 суммарная подъемная сила F.
Известно также, что в воздушной среде с увеличением скорости ее движения давление понижается и наоборот (см. "Физический энциклопедический словарь" под ред. А. М. Прохорова, М. , "Советская энциклопедия", 1984, стр. 387-388). Следовательно, в воздушном потоке 3 и потоке воздуха 5 над несущей плоскостью 2 давление будет ниже, чем в неподвижном воздухе под этой плоскостью. Разность в величинах давлений под несущей плоскостью Р и над несущей плоскостью создает подъемную силу F.
Неподвижность воздуха под несущей плоскостью 2 обеспечивается применением перегородки 12 с цилиндрической поверхностью, которая исключает возможность эжектирования воздуха из-под несущей плоскости 2 и создание там потока воздуха с пониженным давлением. Указанная перегородка обеспечивает создание обособленных друг от друга пространств под и над несущей плоскостью и не позволяет сходящему с несущей плоскости воздушному потоку 3 увлекать воздух из-под этой несущей плоскости.
Летательный аппарат обеспечивает осуществление двух режимов полета: первый - вертикальный взлет и посадка. А также неподвижное парение в воздухе, и второй режим полета - поступательное движение.
Описание первого режима полета приведено выше. Он применяется преимущественно при нахождении летательного аппарата на поверхности земли или в воздухе на малой высоте.
Второй режим полета применяется преимущественно после подъема летательного аппарата на определенную высоту, когда направление вниз части воздушного потока не имеет значения.
Сила тяги в горизонтальном направлении создается при повороте одного из закрылков 14 на некоторый угол α с отклонением вниз части воздушного потока 3. При этом возникает сила лобового сопротивления закрылка воздушному потоку 3. Эта сила является силой горизонтальной тяги, действующей в направлении, в котором располагается данный закрылок от центра О несущей плоскости 2. В связи с тем, что закрылок при этом отклоняет часть воздушного потока вниз, создается дополнительная подъемная сила, действующая на данный закрылок. Эта дополнительная подъемная сила компенсирует уменьшение подъемной силы на части несущей плоскости, обращенной в сторону полета, поскольку встречный поток воздуха приводит к уменьшению скорости воздушного потока и, соответственно, подъемной силы на указанной стороне несущей плоскости и увеличивает как скорость воздушного потока, так и подъемную силу на противоположной направлению полета стороне несущей плоскости. Этим обеспечивается равновесное положение и устойчивость летательного аппарата относительно вертикали во время его поступательного движения.
Повороты летательного аппарата, а также его поступательное движение преимущественно на малой высоте производятся при помощи вертикальных аэродинамических пластин воздушных рулей 13, установленных в воздушном потоке 3 на круговой периферийной поверхности несущей плоскости 2 на вертикальных осях с возможностью независимого друг от друга управляемого поворота этих пластин воздушных рулей в обоих направлениях на определенный угол β. При повороте упомянутых пластин воздушных рулей в одном направлении они отклоняют часть воздушного потока 3 в одну сторону по окружности и обеспечивают поворот летательного аппарата в противоположном направлении. При повороте на своих осях диаметрально противоположно размещенных относительно центра О несущей плоскости упомянутых пластин воздушных рулей в противоположные стороны они совокупно создают воздушный поток в одном направлении и при этом обеспечивают создание тяги в горизонтальном направлении.
При указанном режиме полета без применения закрылка 14, а только с использованием пластин воздушных рулей 13 создается также тяга в горизонтальном направлении за счет наклона вперед несущей плоскости 2 в связи с указанным выше меньшим приложением подъемной силы на обращенную в сторону полета часть несущей плоскости по сравнению с противоположной ее половиной. Указанное явление известно и используется у винтокрылых вертолетов.
Возможно также одновременное применение закрылка 14 и упомянутых пластин воздушных рулей 13 для создания тяги в горизонтальном направлении.
Повороты летательного аппарата могут осуществляться также путем притормаживания вращения одного из роторов 6, 7. Благодаря свойству дифференциального механизма, входящего в состав трансмиссии, другой ротор при этом будет вращаться с большей частотой, что приведет к повороту летательного аппарата в противоположном направлении.
Горизонтальное перемещение летательного аппарата и его повороты можно осуществлять также путем направления в соответствующую сторону выходящих из двигателя газов.
Все указанные выше способы создания горизонтальной тяги и управления полетом летательного аппарата обеспечивают возможность выбора наиболее целесообразного режима полета в разных условиях.
Изобретение относится к области авиации. Для создания подъемной силы F применяют установленную на корпусе 1 плоскую горизонтальную несущую плоскость 2, в центре 0 которой размещают роторы 6, 7, верхний 6 и нижний 7, с горизонтальными лопастями 8, под которыми создают замкнутый объем 4, отделенный от внешнего пространства вращающимися лопастями роторов и верхней поверхностью плоскости 2. Роторы приводят во вращение в противоположные относительно друг друга стороны и увлекают соприкасающийся с ними воздух в радиальных направлениях от центра 0 плоскости 2. Горизонтальный воздушный поток 3 входит в соприкосновение с плоскостью 2 только в периферийной части. Вращающиеся лопасти роторов 6, 7 создают над плоскостью 2 направленный вниз поток воздуха 5. Летательный аппарат имеет трансмиссию для передачи на оба ротора 6, 7 равные по абсолютной величине и противоположно направленные вращающие моменты. Аппарат имеет закрылки 14 и вертикальные воздушные рули 13. Изобретение направлено на расширение арсенала технических средств, используемых для полета. 2 с. и 6 з. п. ф-лы, 3 ил.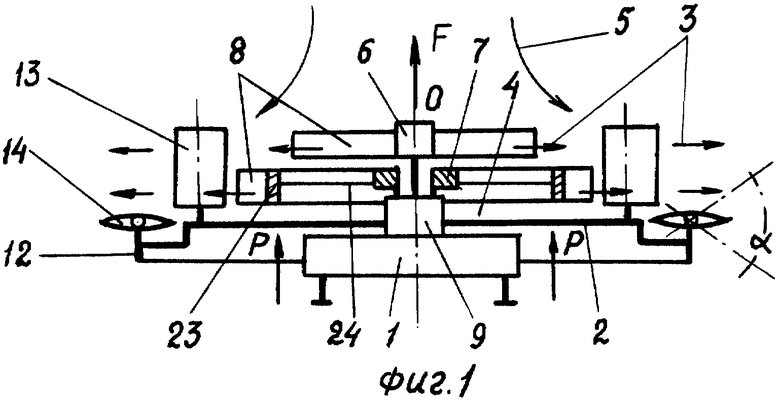
| US 5031859 A, 16.07.1991 | |||
| US 3104853 A, 24.09.1963 | |||
| US 2978206 A, 04.04.1961 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1994 |
|
RU2095282C1 |

