Изобретение относится к двигателям транспортных средств.
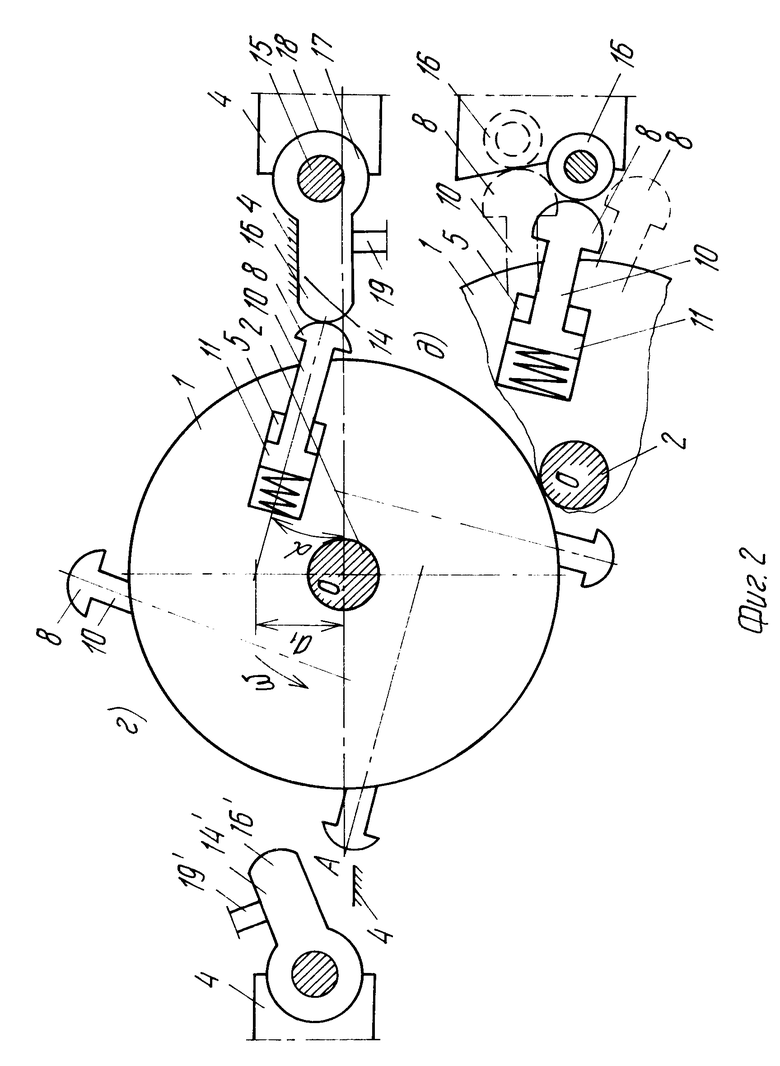
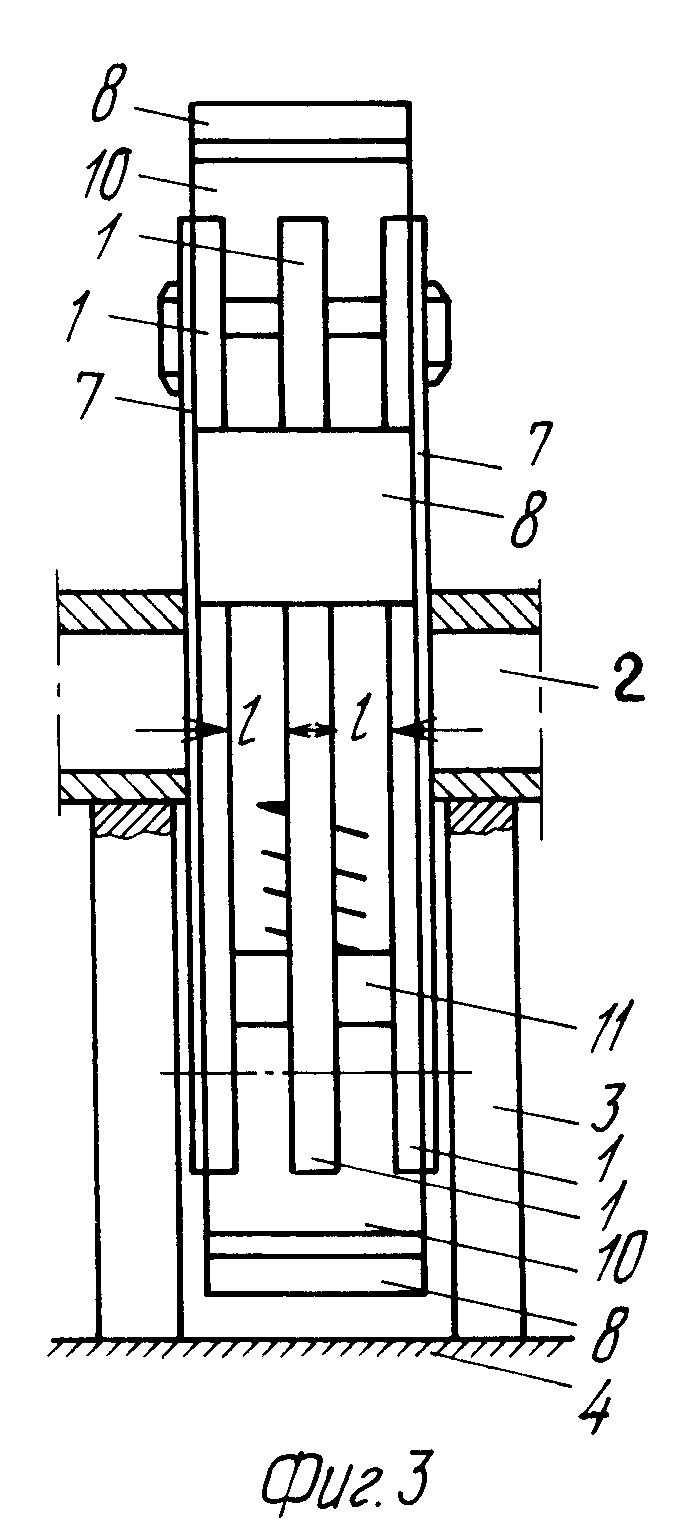
На фиг. 1 (а, б, в) изображен импульсно-инерционный двигатель (ИИД), с наковальнями, вид сверху; на фиг.2 г,д то же; на фиг.3 то же, вид сбоку; на фиг.4 8 фасонные головки фасонных молотов и наковальни; на фиг.9 расположение фасонных наковален вокруг маховика; на фиг.10 храповое устройство.
Импульсно-инерционный двигатель, содержащий маховик, выполненный из маховых кругов 1, закрепленных через расстояния l (фиг.3) на приводном валу 2, подвижно установленном на отверстия, выполненные на верхних концах опор 3, нижние концы которых закреплены на плите, установленной на корпусе зкипажа (судно) 4, с возможностью поворота вокруг вертикальной оси. На маховых кругах 1 выполняются фасонные окна 5, количество которых зависит от диаметра D и назначения ИИД (может быть 2,3,4,5 и более, на фиг.1 четыре). В фасонные окна 5 подвижно устанавливаются подпружиненные молоты 6, оси которых проходят параллельно к радиальным осям маховых кругов 1 на расстоянии а (фиг.1, а).
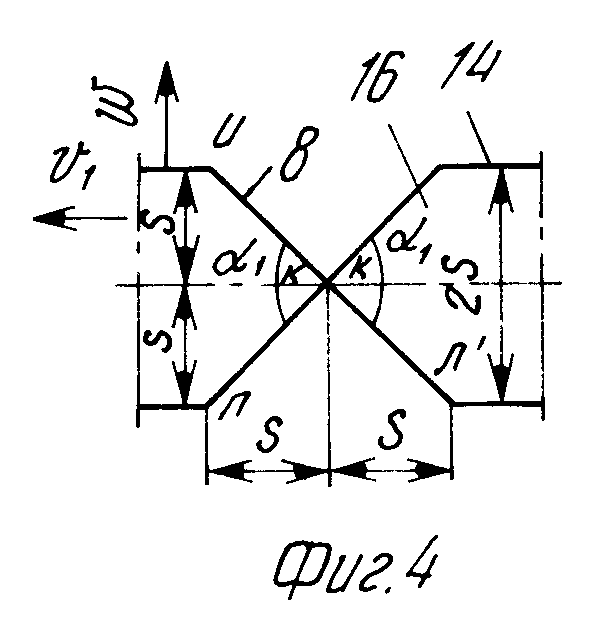
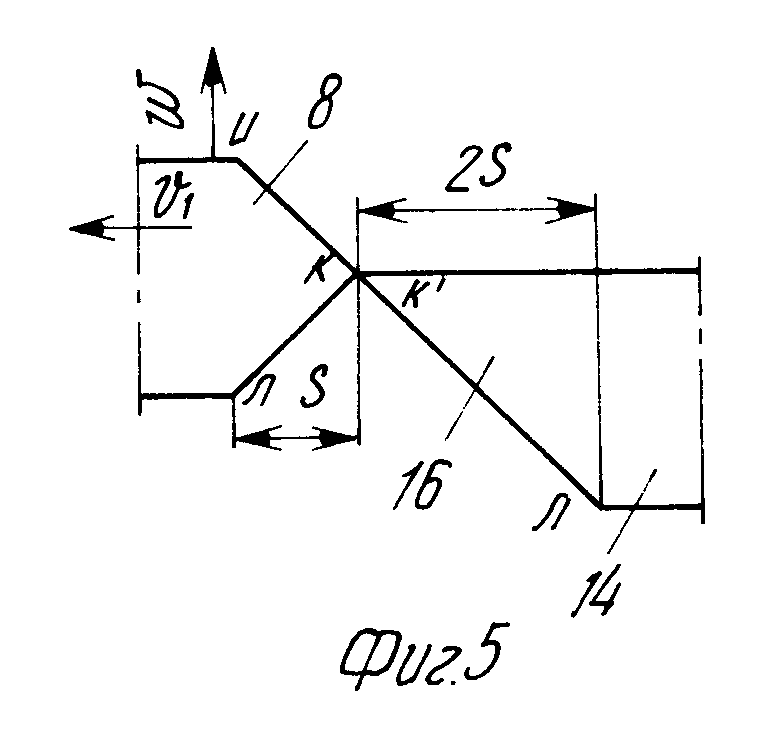
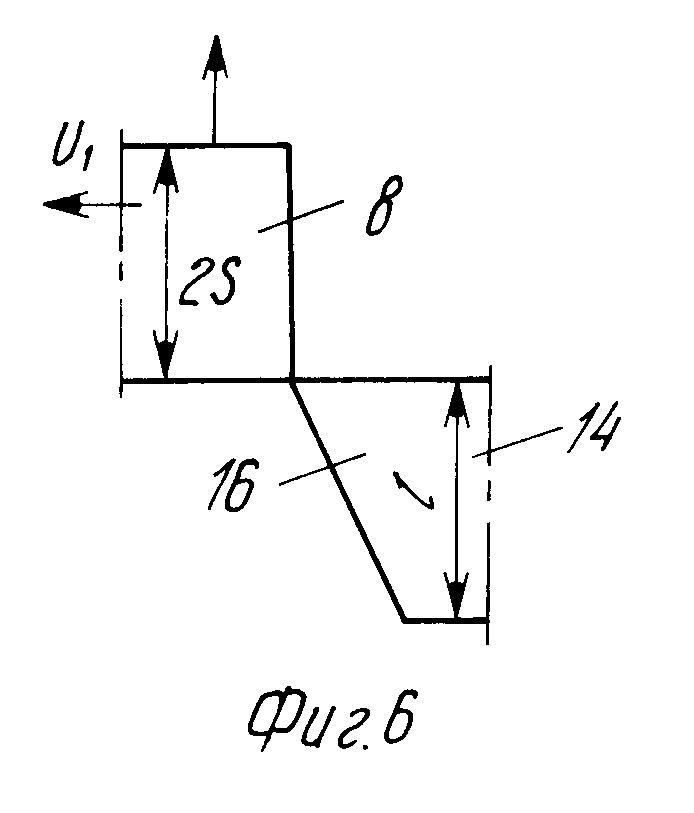
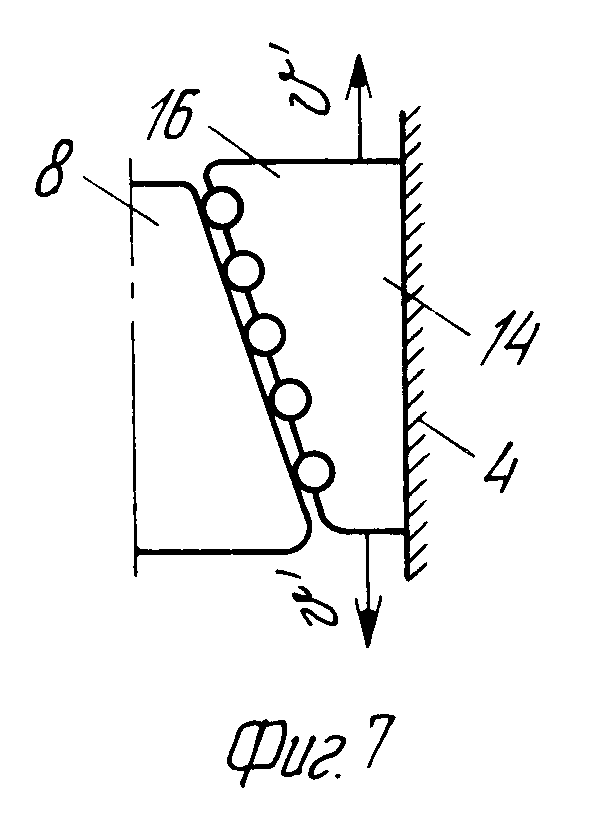
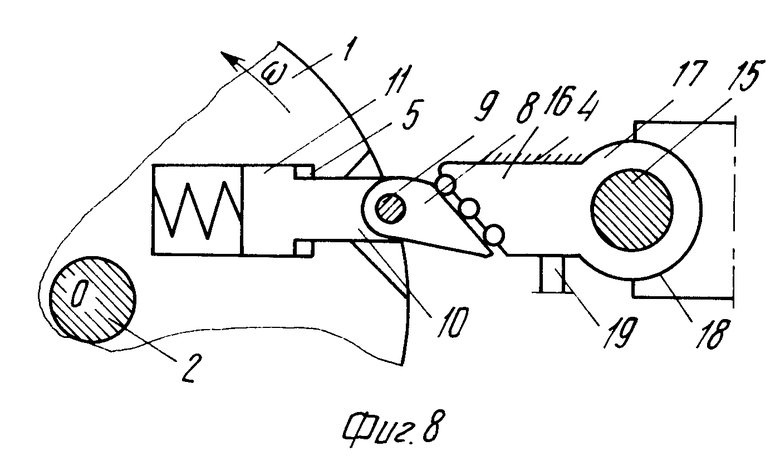
Молоты 6 выполняют функцию маховика, а маховые круги 1 выполняют функцию каркаса для поддержания (крепления) молотов 6, поэтому маховые круги 1 должны выполняться допустимо легкими по массе. В зависимости от длины d молота 6 (фиг.1б) количество маховых кругов 1 может быть от двух и более (на фиг.3 три). С целью удержания молотов 6 в окнах 5 маховых кругов 1 к ним крепятся крепежными штангами крышки 7 (на фиг.1 и 2 крепежные штанги разрезаны и заштрихованы, а на фиг. 3 одна штанга показана не разрезанной, другая штанга осевые линии). Крышки 7 взаимодействуют с боковыми торцами молотов 6. С целью восприятия значительных ударных нагрузок головка 8 молота 6 выполняется овальной (фиг.1а) конусной (фиг.4 и 5), прямоугольной с округленными углами (фиг.6), с покатом (фиг.7) и отдельно выполненной головкой, поворачивающейся вокруг оси 9 (фиг.8). Молот 6 содержит также шейку 10 и Т-образный хвост 11 (фиг.1а,б,г.д), взаимодействующие с роликами 12 и 13, закрепленными в стенках фасонных окон 5 (см.фиг.1а). На фиг.1б показан молот 6 в плане с обозначениями "г" длина и d ширина. На фиг.1г,д осевые линии молотов 6 проходят под углом α (α не более 30о) к радиальным осям маховых кругов 1, дающим возможность получить дополнительную силу от молотов, когда они вращаются против часовой стрелки (стрелка с буквой ω и от точки пересечения до перпендикулярной оси обозначена буквой а), а также пунктирами показаны молоты 6 в начале и в конце ударов.
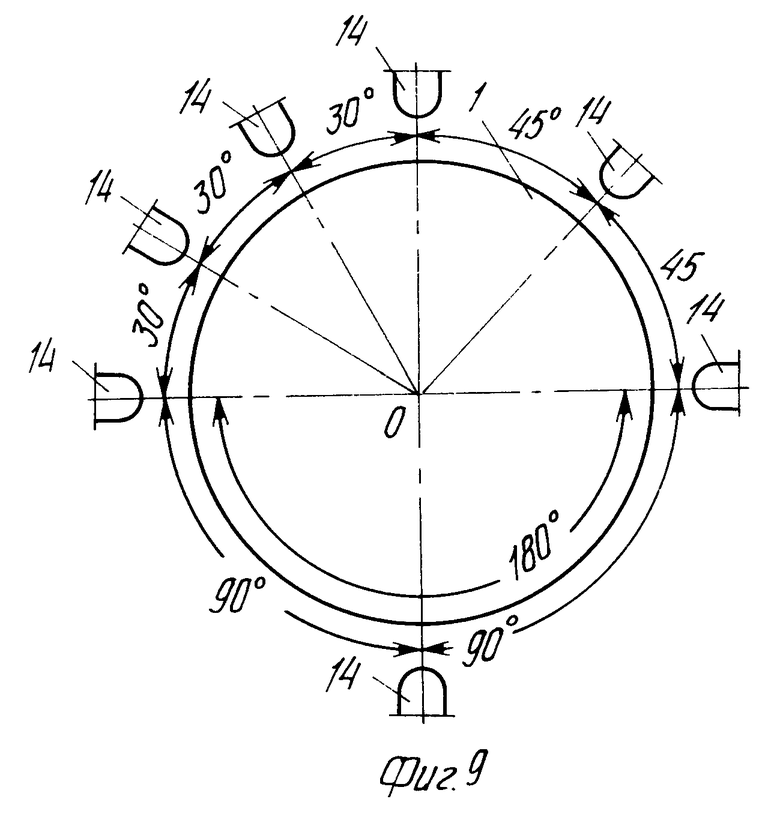
С целью восприятия ударных нагрузок головкой 8 на их пути движения вокруг маховика устанавливается любое количество наковален 14 с возможностью поворота вокруг оси 15, содержащей головку 16, выполненную овально (фиг.1а, в,2г), конусно (фиг.4-6), покатом с роликами (фиг.7 и 8).
С целью резкого уменьшения сил трения при ударных нагрузках и для восприятия весьма значительных ударных нагрузок на головку наковальни 14 устанавливаются роликовые подшипники 16' (фиг.2д) по всей длине d, так как длина d равняется длине d молота 8, длина которого может быть 0,1,02,05, 1,2,3 и более метров.
Цилиндрическая пята 17, отверстие которой взаимодействует с осью 15, посажено на полуцилиндрический подпятник 18, выполненный подвижно (фиг.7 стрелки с буквой V) и прикрепленный к корпусу экипажа (судно) 4. Наковальня 14 поворачивается рычагом 19.
Конструкция наковальни 14' (фиг.1а) заднего хода (предназначенные и для кругового движения фиг.7) идентична с конструкцией наковальни 14 переднего хода. Абсолютно надежным для космических кораблей и предназначенного для полета на Марс является предлагаемый импульсно-индукционный двигатель.
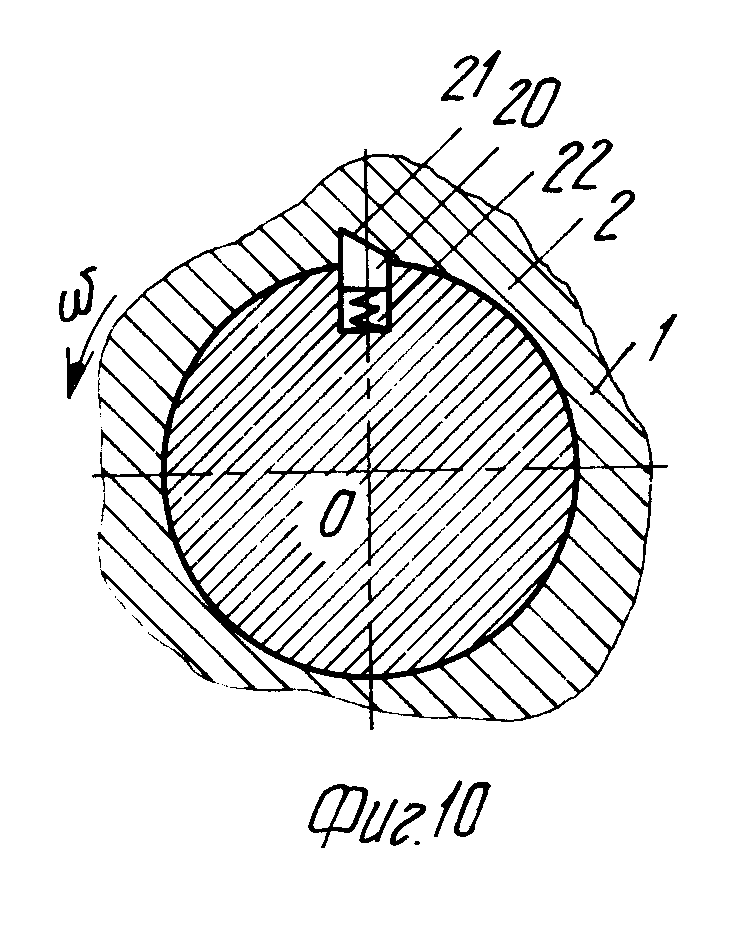
Храповое устройство (фиг.10) содержит подпружиненные собачки 20, взаимодействующие с гнездами 21, выполненными в теле маховика, и гнездами 22, выполненными в теле вала 2. Количество собачек зависит от мощности и назначения ИИД.
На одном экипаже (судно) может устанавливаться несколько маховиков в вертикальной и горизонтальной плоскостях с различным количеством наковален, работающих с одного двигателя с различными массами.
Перед началом вращения маховика рычагами 19 и 19' (как на фиг.1а) наковальни 14 и 14' убираются от пути движения головок 8.
При вращении приводного вала 2, подвижно установленного в отверстия опор 3, от ДВС или электромотора, против часовой стрелки, маховые круги 1 с молотами 6 вращаются уравновешенно с постоянной частотой (фиг.1-10).
Перед движением экипажа (судно) 4 наковальня 14 переднего хода плавно ставится по направлению стрелки, указанной в кожухе наковальни (на фиг. не показана), так как стрелка с буквой V это проекция. Фактическое направление наковальни 14 будет повернуто против часовой стрелки от оси В-В на угол около 40о.
При этом молот 6, зажатый между крышками 7 и взаимодействующий с ними, выполненный с шейкой 10 и хвостом 11, взаимодействующими с роликами 12 и 13, закрепленными в стенках фасонного окна 5, головка 8 рикашетом ударяется о головку 16 наковальни 14. На фиг.2д пунктирами показано начало удара. Удар от головки 16 через ось 15 цилиндрической пяты 17 передается к полуцилиндрическому подпятнику 18, следовательно, корпусу экипажа (судно) 4, который начинает двигаться вперед (стрелка с буквой V).
Как только начинается удар молота 6, он начинает двигаться влево от наковальни 14, преодолевая силу знергии, центробежной силы, прижимая пружину, опирающуюся на маховые круги 1. Если бы молот 6 был установлен по оси А-А, проходящей через центр О приводного вала 2, прикрепленного через опору 3 к корпусу экипажа (судно) 4, то перечисленные энергии передались бы к приводному валу 4, следовательно, эти энергии значительно затормозили бы движение экипажа (судно) 4.
Энергия, затрачиваемая на трение качения между шейкой 10, хвостом 11 с роликами 12 и 13 тоже затормозила бы движение экипажа (судно) 4. Благодаря параллельному расположению осей В-В молотов 6 осям А-А приводного вала 2 на расстояние а (фиг.1а) и благодаря расположению молота 6 под углом α на расстоянии а (фиг.2г), силы пружины и трения помогают вращению маховика и тем самым прибавляется частота вращения маховика. Благодаря храповому механизму, содержащему подпружиненную собачку 20 (фиг.10), взаимодействующую с гнездами 21 и 22, выполненными в телах маховых кругов 1 и приводного вала 2, независимо от передаваемого вращательного движения ДВС маховик получает дополнительное вращение, создавая дополнительную кинетическую (центробежную) энергию молотам 6. Таким образом, энергия движения молота 6, после отскока от наковальни 14, через пружину и силы трения превращается в полезную, двигающую экипаж (судно) энергию.
Таким образом, в ИИД используется энергия удара молота 6, двигающая экипаж (судно) 4, и энергия движения молота 6 назад после удара, тоже двигающую экипаж (судно) 4 в то же направление. Таким образом, для движения экипажа (судно) 4 используются и активная, и реактивная энергии молотов 6, повышающие эффективность и КПД.
Для остановки экипажа (судно) 4 отключается приводной двигатель и рычагом 19 наковальня 14 плавно выводится от пути движения молотов 6.
Механизм удара молота 6 по наковальне 14.
Удар начинается линией И (фиг.1а) длиной d (фиг.1б) головки 8 по линии Л' с длиной d (фиг.1в) наковальни 14, рикошетом, контактируясь площадью ИК головки 8 по площади Л'К' наковальни 14. При ударе участвуют силы: центробежная сила молота 6 и сила инерции, если учесть наклонное расположение молота 6 под углом α (фиг.2г) выталкивающая сила молота 6. Все три силы обрушиваются на наковальню 14, которая не двигается, поэтому энергия перечисленных сил передается до тех пор пока линия Л молота 6 не коснется линии И' наковальни 14. При этом передний буртик хвоста 11 упирается в буртик фасонного окна 5, движение молота 6 прекращается, действия сил тоже и масса молота 6 включается в массу маховика, становясь единой массой.
Кривизна овала головки 16 идентична кривизне подшипниковой головки 16' (фиг. 2д). Поэтому при ударе головки 8 на подшипник 16' овал головки 8 не трется, а перекатывается, резко уменьшая силы трения и износ. Притом после переката головка 8 ударяется в другую подшипниковую головку 16', дополнительно отдавая энергию головки 8 для движения экипажа (судно) 4. Перед основной головкой 16 будет находиться третья головка, как головка 16', смягчающая удар молотов (не показана).
Для того чтобы удар не разрушал взаимодействующие поверхности, удар должен производиться поверхностями. На фиг.3 и 4 ударная поверхность их головки 8 приходится на поверхность К'Л' головки 15, а на фиг.6 удар поката молота 6 приходится на ролики наковальни 14. На фиг.7 удар приходится поворачивающейся вокруг оси 9 головкой 8 по роликам наковальни 14.
При диаметре D маховика D= 0,6 м, частота вращения n=1200 об/мин или 1200:60=20 об/с, в течение 1 с происходит (20˙4)=80 ударов. При длине молота г= 0,20 м, ширина d=3 м, средней толщине е=0,1 м при плотности ρ7 г/см3, масса m молота составит m1=г˙d˙l ˙ ρ0,2˙3˙0,1˙7=0,42 т или 420 кг, линейная скорость молота 6 V= π Dn=3,14˙0,6˙20=38 м/с. Энергия удара составит Е=  24259200 Дж или 24259 кДж (без учета центробежной и выталкивающей сил молота).
24259200 Дж или 24259 кДж (без учета центробежной и выталкивающей сил молота).
Для сравнения масса судна m=10000000 кг, скорость V=0,1 м/с, энергия удара Е=  50000 Дж или 50 кДж.
50000 Дж или 50 кДж.
С какой скоростью будет двигаться экипаж (судно) 4 при использовании ИИД, при следующих параметрах: массе молота m1=420 кг, массе экипажа (судно) m2= 100000 кг, скорости молота V=38 м/с, скорости экипажа (судно) V2=0 м/с. Найдем скорость экипажа (судно) V3.
За какое время поднимется молот 6 на вершину головки 16 наковальни 14, если линейная скорость молота 6 V=38 м/с. Проекции ИК по вертикали и по горизонтали ИК=S=0,1 м (фиг.4). Составляя пропорцию, найдем за какое время вершина головки 8 заберется на вершину головки 16
t=  0,0027 с.
0,0027 с.
Если головка 8 расстояние 0,1 м прошла за 0,0027 с, тогда за 1 с она пройдет V1 v1 38 м. Скорость молота 6 составляет V1=38 м/с.
38 м. Скорость молота 6 составляет V1=38 м/с.
Легко определить линейную скорость V1 молота 6 в вертикальном направлении даже без расчета, исходя из фиг.3, где угол α1 головки 8 молота 6 и угол α 1 наковальни 14 равны, α 1= α 1=90о, а также стороны ИК=КЛ прямоугольных треугольников тоже равны и их проекции S=S=0,1 м, следовательно, горизонтальная линейная скорость молота 6 V=38 м/с, поэтому и линейная вертикальная скорость молота 6 составляет V1=38 м/с.
Одним из фундаментальных законов природы является закон сохранения импульса (количество движения m˙V), проекции вектора полного импульса системы из молота 6 и экипажа (судно) 4 на ось координат, направленную по вектору скорости, до удара и после удара считаем одинаковыми также и векторы скорости молота 6 и экипажа (судно) 4, так как после начала удара и до конца удара головка 8 взаимодействует с головкой 16 наковальни 14.
Следовательно, проекции векторов можно заменить их модулями: m1V1+m2V2= m3V3, отсюда общая скорость V3 после удара молота 6 составит
v3 0,16 м/c
0,16 м/c
Если учесть центробежную и выталкивающую энергию, действующие на молот 6 и передающие на наковальню 14, т.е. на экипаж (судно) 4, во время удара, при этом энергия импульса (удара) увеличится в несколько раз, что заставит экипаж (судно) 4 двигаться гораздо быстрее. Ввиду того, что в течение 1 с происходит 80 ударов, экипаж (судно) 4 будет двигаться со скоростью V3= 0,16˙80=12,8 м/с.
Если перемещать наковальню 14 (фиг.7) возвратно-поступательно со скоростями V1, то молот 6 легко наберет двойную, тройную и т.д. скорость. Если скорость удвоится, это составит (38˙2) -76 м/с, утроится (38˙3) 114 м/с и т. д. Это говорит о том, что возможности предложенного ИИД неограничены.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С МАХОВИЧНЫМ ДВИЖИТЕЛЕМ СУЛТАНОВА А.З. | 1991 |
|
RU2061904C1 |
| ПРУЖИННЫЙ ИМПУЛЬСНЫЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2050467C1 |
| ДВУХСТУПЕНЧАТЫЙ ГАЗОВЫЙ ИМПУЛЬСНЫЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1995 |
|
RU2093694C1 |
| ПАРОВАЯ РАКЕТА С АТОМНЫМ РЕАКТОРОМ В КОМПЛЕКТЕ С ГРУЗОПАССАЖИРСКИМИ ЭНЕРГОВЫРАБАТЫВАЮЩИМИ ЛЕТАЮЩИМИ ТАРЕЛКАМИ | 2000 |
|
RU2190563C2 |
| КАРУСЕЛЬНЫЙ ВЕТРОДВИГАТЕЛЬ | 1991 |
|
RU2006665C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 1988 |
|
RU2014475C1 |
| ЛЕТАЮЩАЯ ТАРЕЛКА СУЛТАНОВА А.З. | 1997 |
|
RU2123456C1 |
| ПАРОВАЯ РАКЕТА С АТОМНЫМ РЕАКТОРОМ | 2000 |
|
RU2178831C2 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ ТРАНСПОРТА СУЛТАНОВА А.З. (ВАРИАНТЫ) | 1998 |
|
RU2142374C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ А.З.СУЛТАНОВА | 1991 |
|
RU2016246C1 |
Использование: энергетические установки. Сущность изобретения: движитель содержит корпус 4 транспортного средства, на котором установлен инерционно-импульсный преобразователь периодического воздействия в однонаправленное движение, выполненный в виде маховика 1 с установленными на нем ударно-импульсными элементами-молотами 6 с возможностью продольного перемещения под действием центробежных сил и ударного взаимодействия с инерционными массами наковальнями 14. 3 з.п.ф-лы, 10 ил.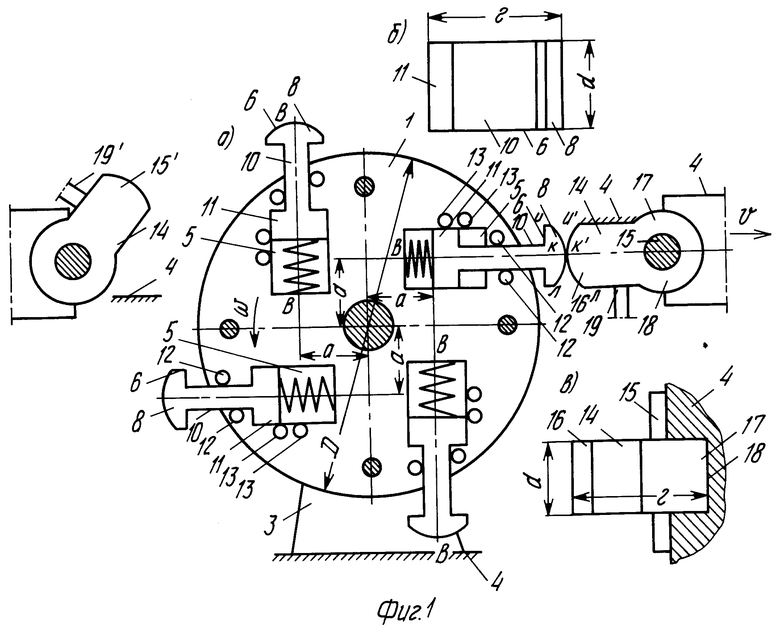
| Гончаревич И | |||
| Ф | |||
| Вибрация - нестандартный путь | |||
| - М.: Наука, 1986, с.175, рис | |||
| Пишущая машина | 1922 |
|
SU37A1 |
