Изобретение относится к морскому горному делу, конкретно для разработки месторождений конкреции и других россыпных полезных ископаемых морского дна.
Известен гидрогрейфер, включающий подъемный канат, силовой гидроцилиндр с перепускным узлом, сообщающим рабочую полость гидроцилиндра с окружающей средой, эластичные камеры, заполненные рабочим телом (маслом) [1] Недостаток этого гидрогрейфера заключается в невозможности корректировки его для избирательного отбора полезных ископаемых морского дна.
Наиболее близким по технической сущности к предлагаемому изобретению является гидрогрейфер, включающий подъемный канат-кабель, силовой гидроцилиндр, в нижней части которого прикреплены лонжероны, на которых установлены симметрично относительно вертикальной оси гидрогрейфера корректировочные гребные винты с электроприводами, снабженные электроцепью дистанционного управления и подводной телевизионной установкой. Недостаток этого гидрогрейфера заключается в падении производительности на абиссальных глубинах океана (1000 м и более из-за незначительной емкости ковша.
Целью изобретения является повышения производительности за счет отбора конкреций и других россыпных полезных ископаемых одновременно с площади 250 м2 поверхности морского дна.
Достигается это тем, что он снабжен каркасом, с двух сторон прикрепленными силовыми гидроцилиндрами с односторонними штоками, и камерой сжатия в подпоршневом пространстве, при этом штоки силовых гидроцилиндров снабжены зубчатыми рейками, входящими в зацепление с шестернями валов, приводящих в действие челюсти ковшей с расстыковкой на 21 м и длиной 12 м, а перепускной узел состоит из гидростатического плунжерного запорного крана, состоящего из герметичного цилиндра со ступенчатым плунжером, имеющим канал для пропуска жидкости, уплотнительные манжеты и фиксаторы плунжера, при этом к нижнему торцу плунжера на гибкой связи прикреплен груз, а также дночерпатель снабжен вертикальными гребными винтами с электроприводами и дистанционным управлением.
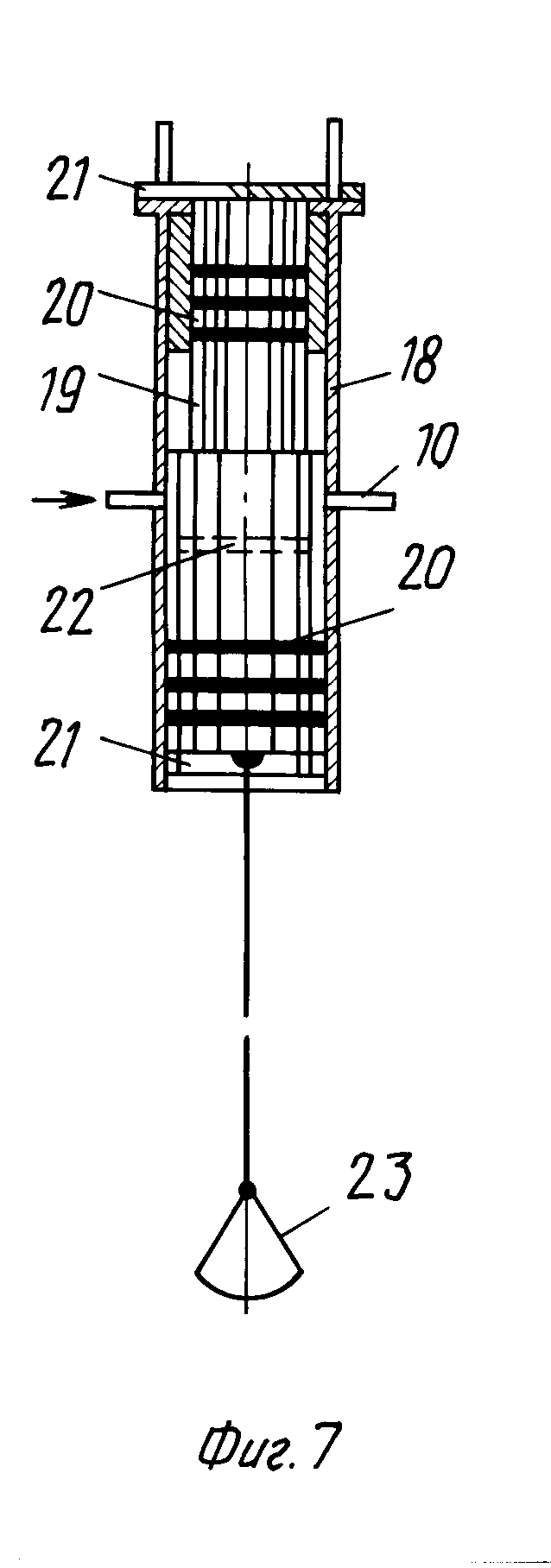
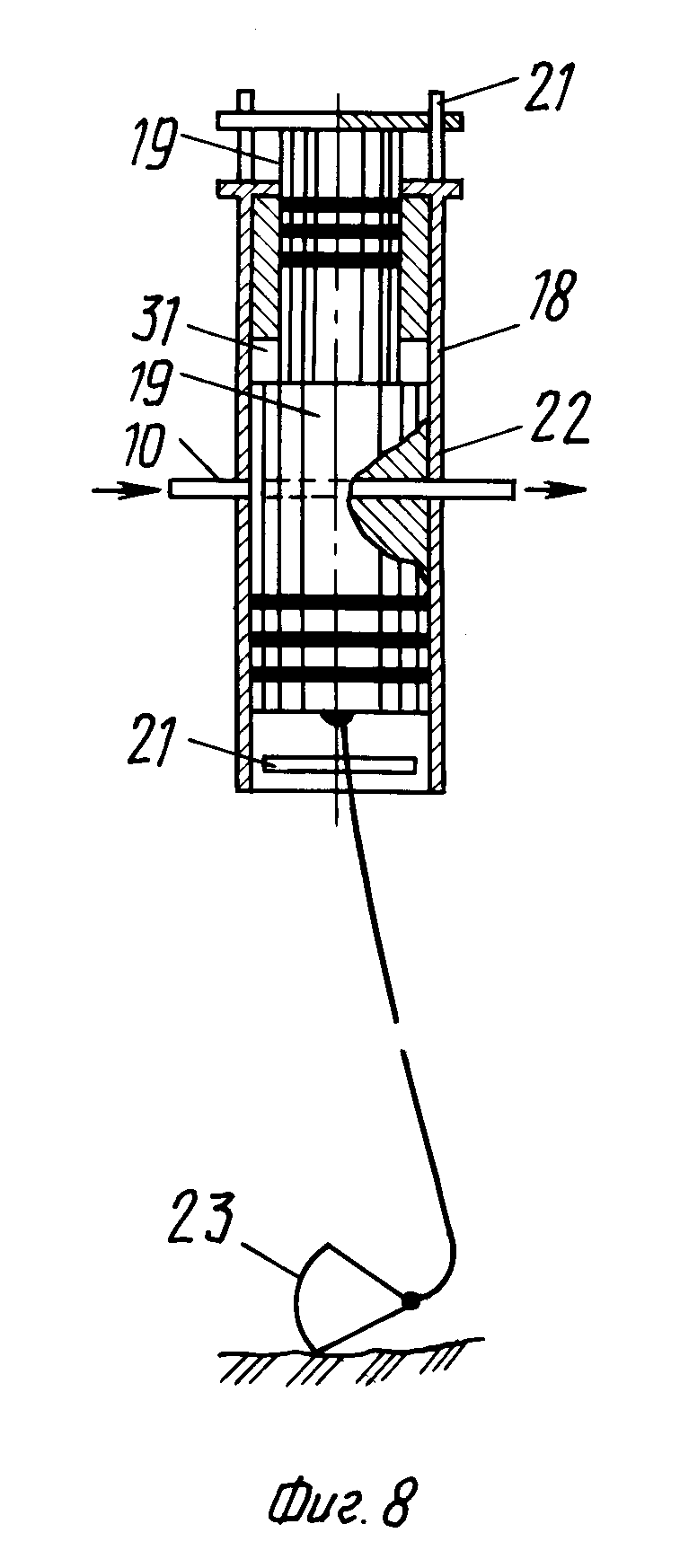
На фиг. 1 изображен дночерпатель, челюсти сомкнуты; на фиг. 2 то же, вид справа; на фиг. 3 принципиальная схема электроцепи электродвигателей гребных винтов; на фиг. 4 то же, электродвигателей гребных винтов; на фиг. 5 контейнер с эластичной камерой, заполненной маслом и гидростатический плунжерный запорный кран; на фиг. 6 разрез силового гидроцилиндра с зубчатой рейкой в зацеплении с шестерней вала привода челюстей; на фиг. 7 гидростатический плунжерный запорный кран в закрытом положении; на фиг. 8 то же, в открытом положении.
Дночерпатель содержит каркас 1, к нему с двух сторон прикреплены по два силовых гидроцилиндра 2, поршни 3 и штоки 4 которых снабжены уплотнительными манжетами 5, а под поршнем имеется камера сжатия 6. Надпоршневые же пространства силовых гидроцилиндров 2, через обратные клапаны 7 двух гидростатических плунжерных запорных кранов 8 и двух пробковых кранов 9 посредством труб 10 сообщаются с двумя эластичными камерами 11, содержащими масло и установленные в двух контейнерах 12, имеющих отверстия 13 (фиг. 1 и 5).
Кроме того, шток 4 каждого силового гидроцилиндра 2 снабжен зубчатой рейкой 14, входящей в зацепление с шестерней 15, прикрепленной к валу 16, приводящему в действие челюсти 17 ковша дночерпателя (фиг. 1, 2 и 6).
Гидростатический плунжерный запорный кран 8 (крепится к контейнеру 12) содержит герметичный цилиндр 18 со ступенчатым плунжером 19, снабженным уплотнительными манжетами 20, фиксаторами 21, проходным для жидкости каналом 22 и грузом 23, прикрепленного гибкой связью к нижнему торцу ступенчатого плунжера 19 (фиг. 7 и 8).
К крайним верхним траверсам 24 каркаса 1 прикреплены гребные винты 25 и 26, снабженные электроприводами (первых и вторых по четыре), причем противоположные гребные винты вращаются: одна пара по часовой стрелке, другая против, но угол атаки гребных винтов выбран с расчетом односторонней тягой. Кроме того, дночерпатель снабжен двумя вертикальными гребными винтами 27 с электроприводами. Управление электроприводами всех гребных винтов осуществляют дистанционно с базового судна посредством каната-кабеля 28 (фиг. 3 и 4; электросхема вертикальных гребных винтов на фигурах не показана). Для наблюдения за движением дночерпателя, он снабжен подводной телевизионной установкой (не показана). Дночерпатель канатами 29 крепят к канату-кабелю 28 подъемной машины, установленной на базовом плавсредстве.
При добыче конкреций челюсти ковша обтягивают сеткой с целью предварительного обогащения, а при добыче других полезных ископаемых сплошным металлическим листом, при этом с целью предотвращения вымывания из ковша полезного груза при подъеме на поверхность воды, над ковшом устанавливают двухстворчатую крышку, которая во время движения дночерпателя к морскому дну под напором встречного потока воды будет открываться, а при обратном движении закрываться (не показана).
Дночерпатель работает следующим образом.
Необходимым условием дночерпателя является, чтобы вес его составлял не более того, чтобы челюсти 17 внедрялись в данные отложения на глубину, необходимую для отбора конкреций, т. е. чтобы ковши скребли конкреции с поверхности морского дна (фиг. 1 и 2). Подобно захвата грейфером картошки рассыпанной на бетонном полу.
Перед спуском дночерпателя на морское дно челюсти 17 расстыкованы на максимальное расстояние (фиг. 1, указаны пунктиром), при этом поршни 3 находятся в верхнем крайнем положении (фиг. 6), а гидростатические плунжерные запорные краны 8 и пробковые краны 9 перекрыты (первые грузом 23). В этом случае рабочее тело (масло) будет отсутствовать в надпоршневом пространстве силовых гидроцилиндров 2. После этого на канате-кабеле 28 дночерпатель опускают на морское дно, при этом челюсти 17 будут удерживаться в максимально расстыкованном положении гидростатическим давлением, действующим на штоки 4 силовых гидроцилиндров 2. Движение дночерпателя прослеживается по экрану телевизионной установки, а приблизившись к морскому дну корректируют гребными винтами 25 и 26 его посадку на необходимый участок рудного поля. Например, если дночерпатель отклонился вправо или влево относительно вертикали каната-кабеля 28, т. е. от участка рудного поля, подлежащего отбору полезного ископаемого (фиг. 2 стрелки), то включают через пусковой реостат 30 электродвигатели гребных винтов 26 (фиг. 3 электроконтакты а и б пунктиром стрелки реверса). Если же дночерпатель необходимо переместить в перпендикулярном направлении первому примеру, то включают электроконтакты в, г и д электродвигателей гребных винтов 25 (фиг. 4). Если необходимо дночерпатель развернуть вокруг каната-кабеля 28, то включают электроконтакты г и д электродвигателей двух гребных винтов 25 (фиг. 4). Например, если канат-кабель длиной 1000 м отклонится от вертикали на 1о, то дночерпатель от заданного участка рудного поля сместится на 18 м, поэтому точность установки надводного базового судна над заданным участком морского дна значительно определит успех дела для полной отработки рудного поля.
После того, когда дночерпатель откорректирован над заданным участком, сажают его челюстями 17 ковша на морское дно для отбора полезного ископаемого. При этом при необходимости усиления давления челюстей 17 на морское дно включают электродвигатели вертикальных гребных винтов 27, причем вращаться будут в противоположные стороны, но тягу развивать одностороннюю (фиг. 1 и 2). Если же необходимо уменьшить давление челюстей 17 на морское дно, то электродвигатели вертикальных гребных винтов 27 переключают на реверс.
При посадке дночерпателя на дно грузы 23, опережая челюсти 17, ликвидируют нагрузку на нижних торцах ступенчатых плунжеров 19 и гидростатическое давление, действующее на разность площадей торцов плунжеров 19 герметичных цилиндров 18, перемещает плунжеры вверх (воздух в цилиндре 18 сожмется в камере 31), совмещая проходной канал 22 с трубой 10 (фиг. 8) и масло из эластичных камер и под давлением, равным гидростатическому давлению морских глубин, действующее в контейнерах 12, на эластичные камеры 11 через отверстия 13, по трубам 10 через обратные клапаны 7 пройдет в надпоршневые пространства силовых гидроцилиндров 2, перемещая поршни 3 вниз, причем воздух в подпоршневом пространстве сжимается в камере 6, а под действием штоков 4 зубчатые рейки 14 переместятся вниз, приводя во вращение шестерни 15 с валами 16 (фиг. 5 и 6, показано: один силовой гидроцилиндр и один контейнер с эластичной камерой).
Приводные валы 16 (их четыре) в свою очередь приведут в действие к взаимной стыковке челюсти 17, производя забор (в два ковша) полезного ископаемого (фиг. 2). После этого дночерпатель поднимают на базовое судно, при этом гидростатические плунжерные запорные краны 18 под весом груза 23 закрываются, а встречным потоком воды ил и песок вымываются из сетки ковшей, частично очищая конкреции. Кроме этого, во время подъема не исключена возможность встряхивания дночерпателя канатом-кабелем 28, одновременно включая вертикальные гребные винты 27, которые, ускоряя поток воды, полностью очистят конкреции от ила, песка и других примесей, способных пройти через отверстия сетки ковшей.
На базовом судне у дночерпателя открывают пробковые краны 9, а челюсти 17 ковшей под собственным весом расстыковываются, производя вращения валов 16 с шестернями 15, последние перемещают вверх зубчатые рейки 14, а вместе с ними штоки 4 с поршнями 3, которые выжимают масло из надпоршневого пространства силовых гидроцилиндров 2 вновь в эластичные камеры 11, при этом обратные клапаны 7 гидроцилиндров 2 под статическим давлением масла закрываются, а обратные клапаны 7 эластичных камер 11 открываются. Для полной перекачки масла из силовых гидроцилиндров в эластичные камеры, частично расстыкованные челюсти ковша опирают на разгрузочную площадку, которые под собственным весом дночерпателя максимально расстыковываются и поршни силовых гидроцилиндров занимают крайнее верхнее положение (фиг. 6, пунктир). На этом заканчивается полный цикл работы дночерпателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| "Гидрогрейфер "Кашалот" | 1989 |
|
SU1765308A1 |
| Гидрогрейфер | 1978 |
|
SU785496A1 |
| Гидрогрейфер | 1979 |
|
SU877024A2 |
| Гидрогрейфер | 1973 |
|
SU641102A1 |
| Подводная установка для отбора керна | 1989 |
|
SU1686149A2 |
| Подводное грунтозаборное устройство "черномор | 1981 |
|
SU1087667A2 |
| Донный пробоотборник | 1981 |
|
SU981857A2 |
| Автономный донный пробоотборник | 1981 |
|
SU1038474A2 |
| Пробоотборник морской "гутизар | 1981 |
|
SU968325A2 |
| "Подводный автономный аппарат "Цейдон" | 1989 |
|
SU1761581A1 |






Использование: в морском горном деле. Сущность изобретения: дночерпатель включает корпус с шарнирно подсоединенными челюстями, кинематически связанный с челюстями гидроцилиндра со штоком и поршнем, разделяющим полость гидроцилиндра на камеру сжатия и камеру с каналом для подачи в нее рабочей жидкости, перекрывающим канал запорным клапаном, имеющим узел управления. На корпусе закреплен кабель-канат для связи с судном обслуживания и группа дистанционно управляемых гребных винтов, приводные валы которых размещены на корпусе взаимно перпендикулярно в горизонтальной плоскости. С целью повышения производительности дночерпатель снабжен дополнительными гидроцилиндрами с односторонними штоками, а корпус выполнен в виде каркаса, симметрично и перпендикулярно к продольной оси которого закреплены гидроцилиндры. Кинематическая связь между гидроцилиндрами и челюстями выполнена в виде вала с закрепленными на нем шестернями и челюстями и зубчатых реек, прикрепленных к штокам гидроцилиндров. Запорный кран канала подачи рабочей жидкости выполнен в виде герметичного цилиндра со ступенчатым плунжером, имеющим канал для пропуска жидкости, манжеты, камеру сжатия и фиксаторы. Узел управления выполнен в виде гибкого звена с грузом, взаимодействующим с дном водоема при спуско-подъеме дночерпателя. Рабочая жидкость заключена в размещенной в перфорированном контейнере эластичной емкости с имеющим пробковый кран трубопроводом для приема жидкости из полостей гидроцилиндров. Дночерпатель может быть снабжен дополнительными гребными винтами, приводные валы которых установлены на корпусе в вертикальной плоскости. 1 з. п. ф-лы, 8 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| "Гидрогрейфер "Кашалот" | 1989 |
|
SU1765308A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
