Изобретение относится к судостроению и может быть использовано для транспортировки в дрейфе научно-исследовательской аппаратуры на заданной глубине океана с последующим всплытием на поверхность воды в заданное время.
Известен подводный аппарат, включающий поплавок, стабилизатор заданной глубины с электромотором, снабженным автономным источником тока, датчики глубины и времени и балластный груз с механизмом двустадийной разгрузки. Недостатком аппарата является невозможность транспортировки аппаратуры з дрейфе на абиссальных глубинах океана.
Целью изобретения является повышение функциональных возможностей за счет обеспечения транспортировки полезного груза при дрейфе подводного аппарата, регулируемом по времени и глубине
Поставленная цель достигается тем, что стабилизатор глубины погружения выполнен в виде гребного винта с вертикально установленным валом соединенным с реверсивным электродвигателем электрически связанным с датчиком глубины в виде герметичных цилиндров с поршнем-ползуном и двусторонним штоком с электроконтактами, имеющим разные площади поперечных сечений, подпружиненным со стороны меньшего сечения, при этом механизм двухстадийной разгрузки выполнен с основным силовым и вспомогательным гидроцилиндрами, рабочие полости которых сообщены с окружающей средой посредством перепускных клапанов, а поршни соединены гибкой связью с донными закрытиями контейнеров балластного груза. Таймер выполнен в виде герметичного корпуса с разрушаемым элементом и с размещенными в корпусе часовым механизмом, источником электропитания, пи- роклапаном и электродетонатором кумулятивного действия, взаимодействующим с разрушаемым элементом.
На фиг. 1 изображен общий вид подводного аппарата; на фиг.2 и 3 - общий вид основного силового и вспомогательного гидроцилиндров с контейнерами; на фиг.4 - разрез таймера, на фиг 5 - разгрузка груза(Л
с
-ч о
ел
00
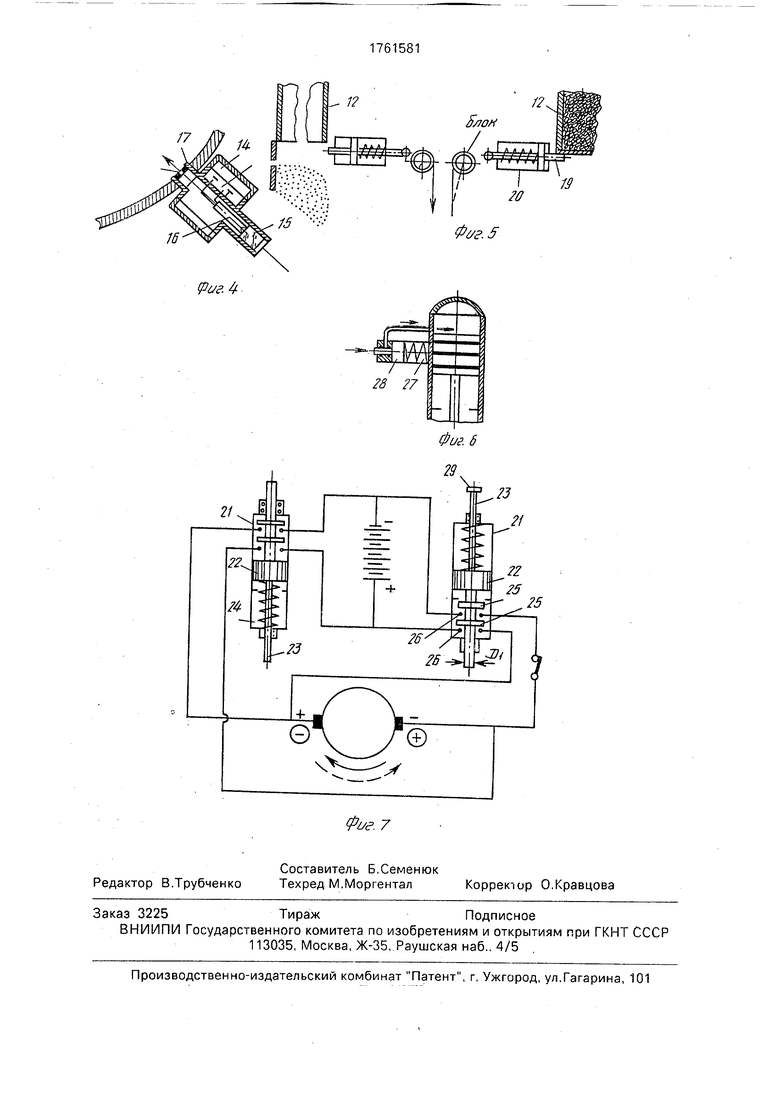
балласта; на фиг.6 - разрез дополнительного гидроцилиндра с обратным клапаном; на фиг.7 - электрическая схема включения-выключения электродвигателя гребного винта и разрез датчика глубины погружения.
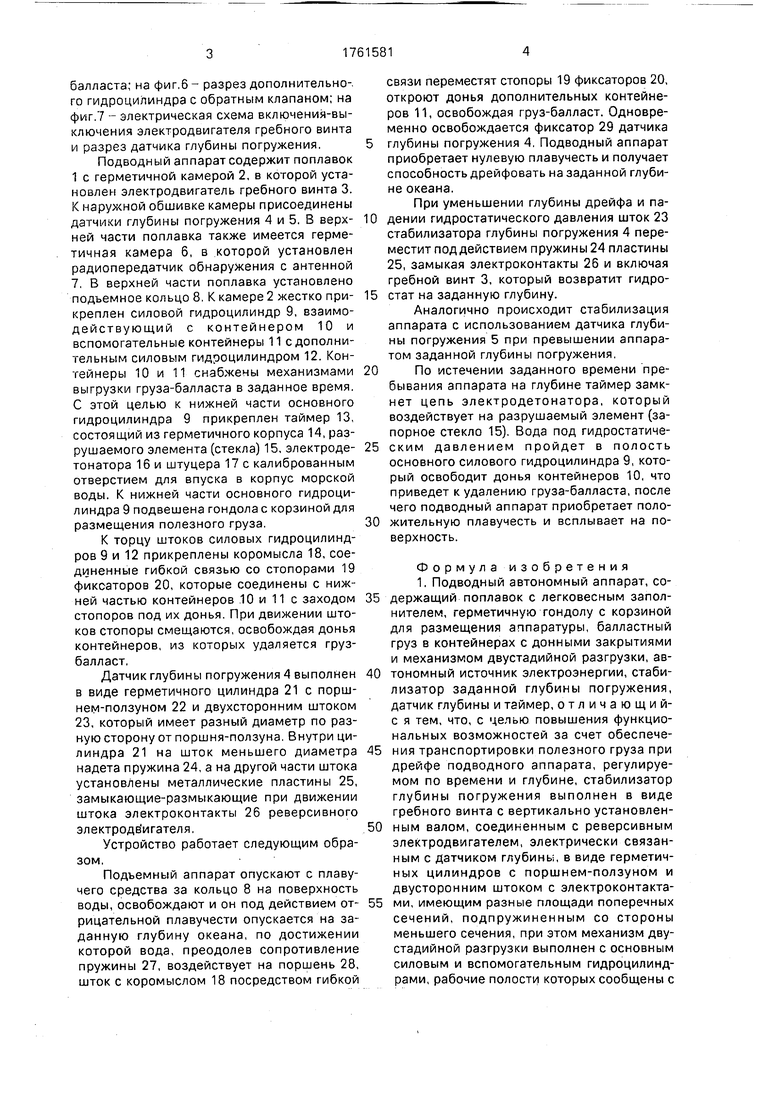
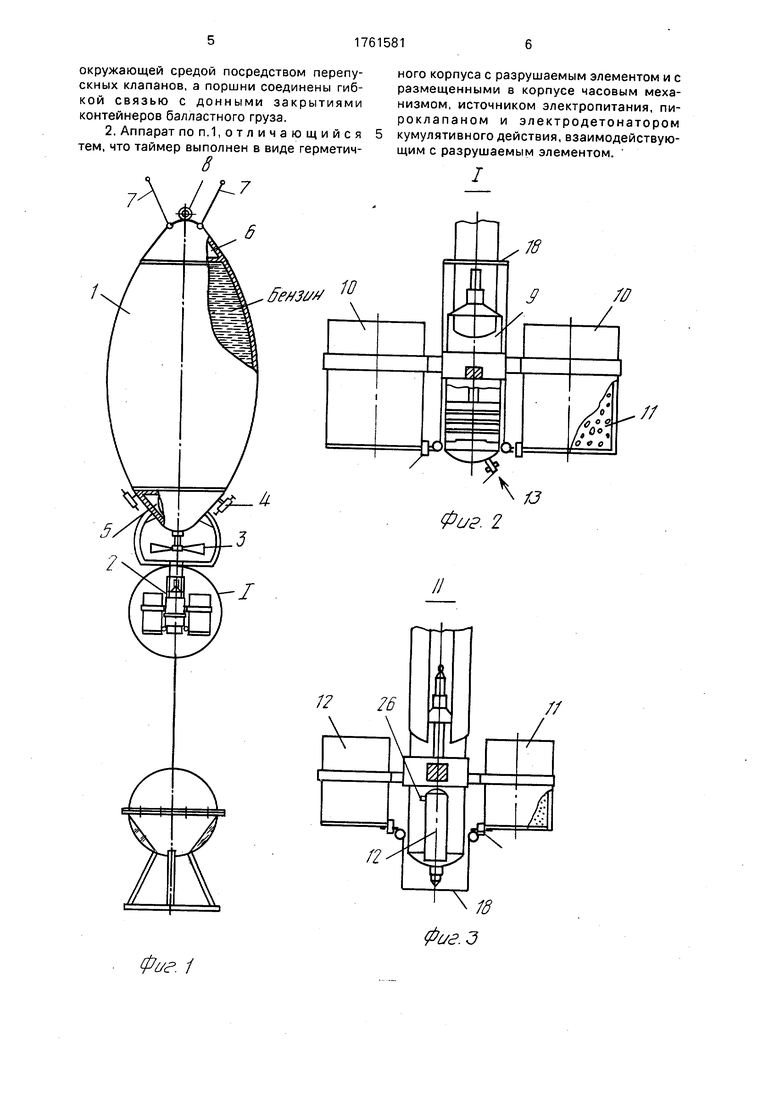
Подводный аппарат содержит поплавок 1 с герметичной камерой 2, в которой установлен электродвигатель гребного винта 3. К наружной обшивке камеры присоединены датчики глубины погружения 4 и 5. В верх- ней части поплавка также имеется герметичная камера 6, в которой установлен радиопередатчик обнаружения с антенной 7. В верхней части поплавка установлено подьемное кольцо 8. К камере 2 жестко при- креплен силовой гидроцилиндр 9, взаимодействующий с контейнером 10 и вспомогательные контейнеры 11 с дополнительным силовым гидроцилиндром 12. Контейнеры 10 и 11 снабжены механизмами выгрузки груза-балласта в заданное время. С этой целью к нижней части основного гидроцилиндра 9 прикреплен таймер 13, состоящий из герметичного корпуса 14, разрушаемого элемента (стекла) 15, электроде- тонатора 16 и штуцера 17с калиброванным отверстием для впуска в корпус морской воды. К нижней части основного гидроцилиндра 9 подвешена гондола с корзиной для размещения полезного груза.
К торцу штоков силовых гидроцилиндров 9 и 12 прикреплены коромысла 18, соединенные гибкой связью со стопорами 19 фиксаторов 20, которые соединены с нижней частью контейнеров 10 и 11 с заходом стопоров под их донья. При движении штоков стопоры смещаются, освобождая донья контейнеров, из которых удаляется груз- балласт,
Датчик глубины погружения 4 выполнен в виде герметичного цилиндра 21 с поршнем-ползуном 22 и двухсторонним штоком 23, который имеет разный диаметр по разную сторону от поршня-ползуна, Внутри цилиндра 21 на шток меньшего диаметра надета пружина 24, а на другой части штока установлены металлические пластины 25, замыкающие-размыкающие при движении штока электроконтакты 26 реверсивного электродвигателя,
Устройство работает следующим образом,
Подъемный аппарат опускают с плавучего средства за кольцо 8 на поверхность воды, освобождают и он под действием от- рицательной плавучести опускается на заданную глубину океана, по достижении которой вода, преодолев сопротивление пружины 27, воздействует на поршень 28, шток с коромыслом 18 посредством гибкой
связи переместят стопоры 19 фиксаторов 20, откроют донья дополнительных контейнеров 11, освобождая груз-балласт. Одновременно освобождается фиксатор 29 датчика глубины погружения 4, Подводный аппарат приобретает нулевую плавучесть и получает способность дрейфовать на заданной глубине океана.
При уменьшении глубины дрейфа и падении гидростатического давления шток 23 стабилизатора глубины погружения 4 переместит под действием пружины 24 пластины 25, замыкая электроконтакты 26 и включая гребной винт 3, который возвратит гидростат на заданную глубину.
Аналогично происходит стабилизация аппарата с использованием датчика глубины погружения 5 при превышении аппаратом заданной глубины погружения,
По истечении заданного времени пребывания аппарата на глубине таймер замкнет цепь электродетонатора, который воздействует на разрушаемый элемент (запорное стекло 15). Вода под гидростатическим давлением пройдет в полость основного силового гидроцилиндра 9, который освободит донья контейнеров 10, что приведет к удалению груза-балласта, после чего подводный аппарат приобретает положительную плавучесть и всплывает на поверхность.
Формула изобретения 1, Подводный автономный аппарат, содержащий поплавок с легковесным заполнителем, герметичную гондолу с корзиной для размещения аппаратуры, балластный груз в контейнерах с донными закрытиями и механизмом двустадийной разгрузки, автономный источник электроэнергии, стабилизатор заданной глубины погружения, датчик глубины и таймер, отличающий- с я тем, что, с целью повышения функциональных возможностей за счет обеспечения транспортировки полезного груза при дрейфе подводного аппарата, регулируемом по времени и глубине, стабилизатор глубины погружения выполнен в виде гребного винта с вертикально установленным валом, соединенным с реверсивным электродвигателем, электрически связанным с датчиком глубинь,, в виде герметичных цилиндров с поршнем-ползуном и двусторонним штоком с электроконтактами, имеющим разные площади поперечных сечений, подпружиненным со стороны меньшего сечения, при этом механизм двустадийной разгрузки выполнен с основным силовым и вспомогательным гидроцилиндрами, рабочие полости которых сообщены с
окружающей средой посредством перепускных клапанов, а поршни соединены гибкой связью с донными закрытиями контейнеров балластного груза.
2. Аппарат по п.1,отличающийся тем, что таймер выполнен в виде герметичВ
7
ного корпуса с разрушаемым элементом и с размещенными в корпусе часовым механизмом, источником электропитания, пи- роклапаном и электродетонатором кумулятивного действия, взаимодействующим с разрушаемым элементом.
7
//
Фиг. 2
//
| название | год | авторы | номер документа |
|---|---|---|---|
| "Гидрогрейфер "Кашалот" | 1989 |
|
SU1765308A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ И ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529940C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЛУБИНЫ ГЛУБОКОВОДНОГО ДРЕЙФУЮЩЕГО ПРИБОРА | 2004 |
|
RU2290339C2 |
| ДНОЧЕРПАТЕЛЬ "КРАБ" | 1993 |
|
RU2047693C1 |
| Способ и устройства повышения глубоководности, проходимости, работоспособности, универсальности транспортных средств, эффективности работ на грунте | 2021 |
|
RU2789617C2 |
| СПОСОБ ПОСТАНОВКИ ДРЕЙФУЮЩЕГО ПРИБОРА НА ЗАДАННОЙ ГЛУБИНЕ | 2009 |
|
RU2414376C2 |
| ПОДВОДНЫЙ ТАНКЕР | 2008 |
|
RU2380274C1 |
| Автономный донный пробоотборник | 1981 |
|
SU1038474A2 |
| МОРСКОЙ АВТОНОМНЫЙ КОМПЛЕКС (МАК) | 2003 |
|
RU2268840C2 |
| ТЕРМОЗОНД ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ВОДЫ | 2012 |
|
RU2513635C1 |
Изобретение относится к судостроению. Целью изобретения является повышение эксплуатационной эффективности подводного аппарата за счет обеспечения транспортировки полезного груза при дрейфе, регулируемом по времени и глубине. Стабилизатор глубины погружения выполнен в виде установленного вертикально гребного винта и реверсивного электродвигателя, электрически связанного с датчиком глубины, а донные закрытия контейнеров балластного груза соединены гибкой связью с механизмом их двустадийной разгрузки в виде основного и вспомогательного гидроцилиндров 1 з.п.ф-лы, 7 ил.
Фиг. 1
фие.Э
17
2f
1
/4
Т
Г
.25
13
Фг/г. 5
у г 28 27
фиг. 6
ь
.23
Л
21
22 5
,25
26
/
26
1
| Патент США № 3228369, кл | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
