Изобретение относится к системам автоматического регулирования и может быть использовано в прецизионных системах стабилизации скорости вращения электродвигателей.
Известно устройство для стабилизации скорости электродвигателя, содержащее задатчик скорости, частотно-фазовый дискриминатор, импульсный датчик скорости, электронный ключ, электродвигатель[1] В этом устройстве сигнал управления электродвигателем зависит как от разности частот задатчика скорости и импульсного датчика, так и от фазового рассогласования этих сигналов. Недостатком данного устройства является малая стабильность мгновенной скорости при наличии внешних возмущающих моментов, а также ограниченный диапазон стабилизируемых скоростей, что связано с ограничением частоты переключения электронного ключа.
Наиболее близким к изобретению по технической сущности является устройство стабилизации скорости вращения электродвигателя содержащее задатчик скорости, подключенный через формирователь задающих импульсов к первому входу формирователя ошибки по углу, второй вход которого соединен с выходом импульсного датчика скорости, формирователь ошибки по скорости, первый вход которого соединен с выходом задатчика скорости, а второй с выходом импульсного датчика скорости, сумматор, входы которого подключены к выходам формирователей ошибок по углу и по скорости, цифроаналоговый преобразователь, связанный с выходом сумматора, усилитель мощности и электродвигатель, вал которого соединен с валом импульсного датчика. Таким образом имеется два канала формирования ошибки по углу и по скорости [2]
Недостатком этого устройства является наличие ошибки по углу, связанной с воздействием возмущающих моментов. Наличие этой ошибки ведет к нестабильности мгновенной скорости вращения. Уменьшение ошибки по углу может быть обеспечено путем увеличения коэффициента усиления системы. Однако это не всегда возможно из-за ограниченной жесткости механического соединения вал исполнительного двигателя нагрузка.
Целью изобретения является повышение точности стабилизации скорости электродвигателя.
Поставленная цель достигается тем, что в цифровую систему стабилизации скорости введены датчик нулевого положения, связанный с валом электродвигателя, задатчик режима, первый вход которого соединен с выходом формирователя ошибки по скорости, а второй вход соединен с выходом датчика нулевого положения, цифровой фильтр, вход которого соединен с выходом формирователя ошибки по углу, счетчик импульсов, первый вход которого соединен с выходом импульсного датчика, а второй вход подключен к выходу датчика нулевого положения, запоминающее устройство, вход данных которого соединен с выходом цифрового фильтра, вход управления подключен к выходу задатчика режима, а адресный вход соединен с выходом счетчика импульсов, формирователь сигнала сдвига, вход которого соединен с выходом задатчика скорости, регистр сдвига, первый вход которого соединен с выходом запоминающего устройства, а второй вход подключен к выходу формирователя сигнала сдвига, при этом выход регистра сдвига соединен с третьим входом сумматора.
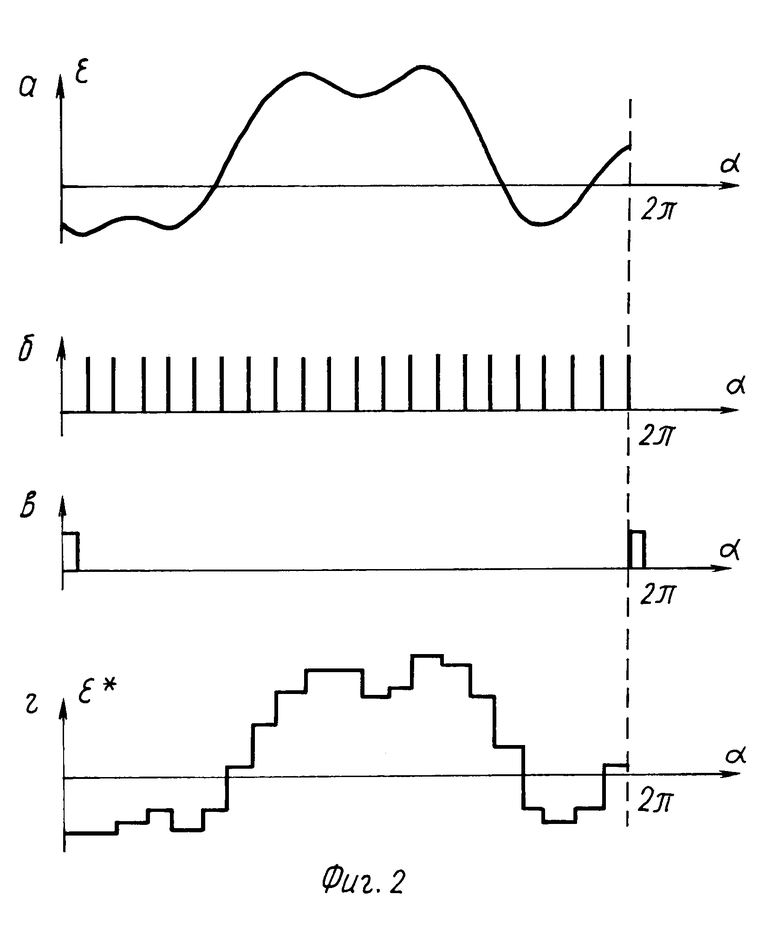
На фиг. 1 представлена функциональная схема цифровой системы стабилизации скорости; на фиг. 2 приведены диаграммы работы системы, где на диаграмме 2а показана угловая ошибка системы, на диаграмме 2б показана последовательность сигналов с импульсного датчика, на диаграмме 2в показаны сигналы с датчика нулевого положения, на диаграмме 2г показан сигнал на выходе ЗУ.
На фиг. 3 представлена блок-схема алгоритма работы цифрового фильтра.
Цифровая система стабилизации скорости содержит задатчик скорости 1, подключенный через формирователь задающих импульсов 2 к первому входу формирователя ошибки по углу 3, второй вход которого соединен с выходом импульсного датчика 4, формирователь ошибки по скорости 5, первый вход которого соединен с выходом задатчика скорости 1, а второй с выходом импульсного датчика 4, сумматор 6, два входа которого подключены к формирователям ошибки по углу 3 и по скорости 5, а третий вход подключен к выходу регистра сдвига 7, первый вход которого соединен с выходом запоминающего устройства (ЗУ) 8, а второй вход через формирователь сигнала сдвига 9 подключен к выходу задатчика скорости 1, при этом вход управления ЗУ 8 соединен с выходом задатчика режима 10, первый вход которого соединен с выходом формирователя ошибки по скорости 6, а второй вход задатчика режима 10 соединен с выходом датчика нулевого положения 12, адресный вход ЗУ 8 соединен с выходом счетчика импульсов 11, первый вход которого соединен с выходом импульсного датчика 4, а второй вход соединен с выходом датчика нулевого положения 12, вход данных ЗУ 8 соединен через цифровой фильтр 13 с выходом формирователя ошибки по углу 3, последовательно соединенные цифроаналоговый преобразователь (ЦАП) 14, подключенный к выходу сумматора 6, усилитель мощности (УМ) 15 и электродвигатель 16, вал которого связан с импульсным датчиком 4 и датчиком положения 12.
Устройство работает следующим образом.
На выходе задатчика скорости 1 устанавливается цифровой код заданной скорости. Формирователь задающих импульсов 2 вырабатывает последовательность импульсов с частотой, пропорциональной величине заданной скорости. Формирователь ошибки по углу 3 измеряет фазовый сдвиг между задающими импульсами и импульсами с импульсного датчика 4. Формирователь ошибки по скорости 5 измеряет разность между заданным и измеренным периодами следования импульсов. Таким образом в каждом периоде импульсов импульсного датчика 4 формируется цифровое значение ошибки по углу и скорости. Задатчик режима 10 управляет работой ЗУ 8.
После включения системы в задатчике режима 10 осуществляется сравнение текущего значения ошибки по скорости, которое выдает формирователь 5, с заданным значением ошибки, при котором система переходит в режим стабилизации скорости. После того как текущее значение ошибки по скорости становится меньше этого значения происходит запись сигнала угловой ошибки на одном обороте в ЗУ 8, при этом используется сигнал с датчика нулевого положения 12.
Ошибка по углу, которая возникает от воздействия низкочастотной составляющей возмущающего момента, действующего на ротор электродвигателя, носит регулярный характер (повторяется на каждом обороте).
Случайная составляющая ошибки от воздействия возмущающего момента имеет высокочастотный характер и фильтруется цифровым фильтром 13 перед записью ошибки в ЗУ 8. С приходом каждого импульса с импульсного датчика 4 (диаграмма 2б) на выходе счетчика импульсов 11 формируется адрес ячейки, в которую записывается цифровое значение угловой ошибки. На последующих оборотах задатчик режима 10 переключает ЗУ 7 на чтение записанной угловой ошибки, причем адрес ячейки памяти в режиме считывания формируется аналогично (диаграмма 2г).
Импульсы с датчика нулевого положения 12, которые поступают один раз за оборот вала электродвигателя (диаграмма 2,в), служат для обнуления счетчика импульсов 11, при этом устанавливается начальный адрес ячейки ЗУ 8. Кроме того, сигнал с датчика нулевого положения 12 используется для управления задатчиком режима 10.
Таким образом после записи сигнала на первом обороте происходит только считывание информации на ЗУ 8. Компенсирующий сигнал с выхода ЗУ 8 (диаграмма 2, г) поступает на вход регистра сдвига, в котором происходит временная задержка компенсирующего сигнала, необходимая, чтобы учесть фазовый сдвиг, который имеет моментная составляющая ошибки при увеличении скорости вращения и, следовательно, частоты возмущающих воздействий. Величина задержки регулируется формирователем сигнала сдвига 9, в котором происходит вычитание значения заданной скорости, при котором происходила запись сигнала угловой ошибки в ЗУ 8, и текущего значения заданной скорости. При этом величина полученной разности определяет временную задержку (фазовый сдвиг) компенсирующего сигнала в регистре сдвига 7. Далее сигнал с выхода регистра сдвига 7 складывается в сумматоре 6 с сигналами ошибок по углу и скорости. Суммарный сигнал преобразуется цифроаналоговым преобразователем 14 и через УМ 15 управляет электродвигателем 16. При этом происходит компенсация воздействия регулярного возмущающего момента в течение каждого последующего оборота ротора электродвигателя.
Задатчик скорости 1 реализован в виде переключателей со схемой формирования стандартных цифровых сигналов.
Формирователь задающих импульсов 2 представляет собой преобразователь код-частота.
Алгоритм работы цифрового фильтра 13 представлен на блок-схеме фиг. 3. В процедуре 17 осуществляется ввод и накапливание текущих значений ошибок в массиве по номерам n (перед началом работы цифрового фильтра значение n устанавливается равным шестнадцати). В операторах 18 и 19 происходит уменьшение значения n на единицу и сравнение полученного значения с нулем. Если значение n не равно нулю, то это означает, что массив текущих значений ошибок не заполнен. Происходят выход из программного блока и ожидание, пока не возникает необходимость ввода следующего значения текущей ошибки, при этом опять процедура 17 и операторы 18, 19. Если значение n равно нулю, массив текущих значений ошибок заполнен и в процедуре 20 происходит определение средней ошибки по углу путем нахождения среднего арифметического из шестнадцати, записанных в массиве, текущих значений ошибки. Далее в процедуре 21 определяется разность между полученным средним значением и средним значением ошибки, вычисленным для предыдущих шестнадцати значений текущей ошибки. Полученное значение делится на шестнадцать, тем самым вычисляется приращение ошибки по углу. Оператором 22 устанавливается значение n равным шестнадцати. В процедуре 23 происходит суммирование n-ого значения ошибки с приращением. В процедуре 24 осуществляется запись компенсирующего сигнала в ЗУ 3. В операторах 25 и 26 происходит уменьшение значения n на единицу и сравнение с нулем. Если n не равно, то осуществляется переход на процедуру 23, иначе оператором 27 переменной n присваивается значение, равное шестнадцати, и осуществляется выход из программного блока цифрового фильтра.
Импульсный датчик 4 и датчик нулевого положения 12 фотоэлектрического типа вырабатывают z импульсов при повороте вала датчика на один оборот. При этом для датчика нулевого положения z=1. Датчики 4 и 12 могут быть индукционного типа.
Экспериментальные исследования макета системы показали, что в предлагаемой цифровой системе стабилизации скорости систематическая ошибка стабилизации скорости, вызванная регулярной составляющей возмущающего момента, уменьшается не менее чем в 5 раз. Тем самым повышается точность стабилизации скорости электродвигателя без повышения коэффициента усиления системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРУГЛОВЯЗАЛЬНАЯ МАШИНА | 1991 |
|
RU2016936C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2074514C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2269805C2 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2061299C1 |
| ПРОГРАММИРУЕМОЕ УСТРОЙСТВО СОПРЯЖЕНИЯ С ПОВЫШЕННОЙ НАГРУЗОЧНОЙ СПОСОБНОСТЬЮ | 1992 |
|
RU2039374C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2155437C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |


Изобретение относится к системам автоматического регулирования и может быть использовано в прецизионных системах стабилизации скорости вращения электродвигателей. Целью изобретения является повышение точности стабилизации скорости электродвигателя. В цифровую систему стабилизации скорости введены датчик нулевого положения, счетчик импульсов, задатчик режима, цифровой фильтр, регистр сдвига, формирователь сигнала сдвига и запоминающее устройство, вход данных которого соединен через цифровой фильтр с выходом формирователя ошибки по углу, адресный вход соединен с выходом счетчика импульсов, вход управления соединен с выходом задатчика режима, первый вход которого соединен с выходом формирователя ошибки по скорости, а второй с выходом датчика нулевого положения. Выход запоминающего устройства соединен с первым входом регистра сдвига, выход которого соединен с третьим входом сумматора, а второй вход регистра сдвига соединен через формирователь сигнала сдвига с выходом задатчика скорости, при этом первый и второй входы счетчика импульсов подключены соответственно к выходам импульсного датчика и датчика нулевого положения. 3 ил.
ЦИФРОВАЯ СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ, содержащая последовательно соединенные задатчик скорости, формирователь задающих импульсов, формирователь ошибки по углу, сумматор, цифроаналоговый преобразователь, усилитель мощности и электродвигатель с импульсным датчиком на валу и формирователь ошибки по скорости, включенный между выходом задатчика скорости и вторым входом сумматора, причем выход импульсного датчика подключен к вторым входам формирователей ошибки по углу и по скорости, отличающаяся тем, что между выходом формирователя ошибки по углу и третьим входом сумматора включены последовательно соединенные цифровой фильтр, запоминающее устройство и регистр сдвига, между выходом задатчика скорости и вторым входом регистра сдвига включен формирователь сигнала сдвига, между адресным входом запоминающего устройства, и выходом импульсного датчика включен счетчик импульсов, между входом управления запоминающего устройства и выходом формирователя ошибки по скорости включен задатчик режима, а вторые входы задатчика режима и счетчика импульсов подсоединены к выходу датчика нулевого положения, связанного с валом электродвигателя.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1987 |
|
SU1508332A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
