Изобретение относится к электрогидравлическим следящим приводам (ЭГСП) общего назначения и может быть использовано при разработке следящих быстродействующих приводов для управления любым высокоинерционным объектом (например, манипуляторы, антенны радиотелескопов и т.п.).
Известны ЭГСП большой мощности, состоящие из последовательно соединенных задатчика входного сигнала, измерителя рассогласования, электронного усилителя, гидропривода с электронным усилителем мощности, гидроусилителем, предохранительными клапанами и гидродвигателем с нагрузкой [1].
Входной сигнал такого ЭГСП сравнивается на элементе сравнения с сигналом датчика обратной связи, формируется сигнал рассогласования (ошибки), который через электронный усилитель и гидроусилитель управляет гидродвигателем. В процессе отработки входного сигнала в гидроусилителе происходит изменение положения управляющего золотника, что приводит к изменению величин расходов и давлений в полостях гидромотора.
В качестве прототипа рассмотрен следящий привод, содержащий последовательно соединенные задатчик входного сигнала, цифровой измеритель рассогласования, первый цифроаналоговый преобразователь, релейный анализатор ошибки, усилитель, первый сумматор, электрогидравлический силовой привод, объект регулирования с цифровым датчиком угла и датчиком скорости, причем выход цифрового датчика угла соединен с вторым входом цифрового измерителя рассогласования, выход датчика скорости соединен с релейным анализатором скорости, выход цифрового измерителя рассогласования через второй цифроаналоговый преобразователь соединен с первым входом второго сумматора и через блок памяти с вторым входом второго сумматора, выход которого через релейный элемент и релейный анализатор скорости соединен с вторым входом первого сумматора [2].
При отработке ступенчатого сигнала большого уровня релейный анализатор ошибки обеспечивает уменьшение коэффициента усиления усилителя и запоминание на выходе блока памяти части (около половины) сигнала рассогласования. В результате с релейного элемента через релейный анализатор скорости подается постоянное значение сигнала на разгон силового привода с максимальным ускорением. Когда силовой привод отработает половину (или около половины) рассогласования, сигнал с выхода второго сумматора изменяет знак постоянного сигнала и с выхода релейного элемента через релейный анализатор скорости и первый сумматор сигнал управления поступает на вход электрогидравлического силового привода. Золотник гидроусилителя электрогидравлического силового привода переходит из одного крайнего положения в другое. В результате силовой привод тормозится с максимальным замедлением.
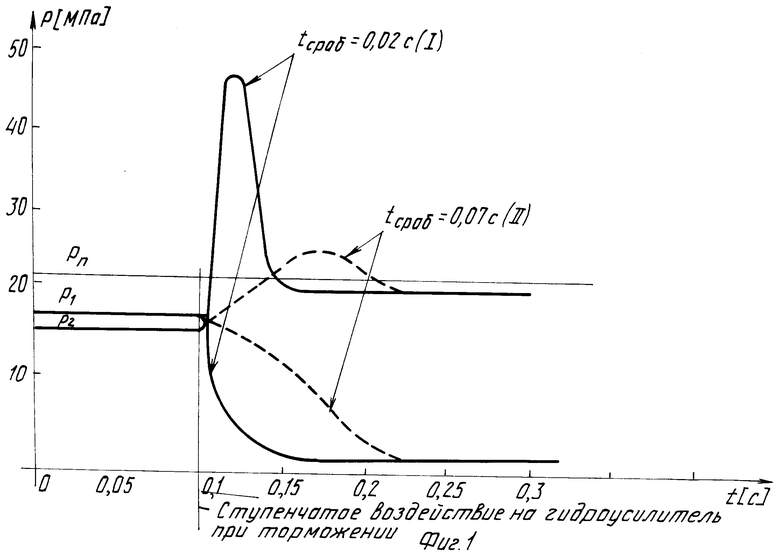
Недостатком аналога и прототипа является возникновение в гидроприводе больших забросов давлений в гидролиниях при переключении золотника из одного крайнего положения в другое в режимах отработки ЭГСП больших рассогласований. Это явление происходит при прохождении золотником среднего положения, когда гидролиния низкого давления закрывается, а гидромотор под действием инерционной нагрузки работает в насосном режиме и подает в эту гидролинию рабочую жидкость. В качестве примера на фиг.1 показаны переходные процессы давлений Р1 и Р2 в полостях гидромотора ЭГСП при переключении золотника за время 0,02 с (кривая 1), при давлении питания Рп=22 МПа и начальных давлениях (Р1, Р2) в гидролиниях 16-18 МПа. Заброс давления достигает величины 47 МПа, что намного превосходит допустимое значение давления в гидроприводе. Введение в ЭГСП предохранительных клапанов не дает положительного результата, так как при больших мощностях управления требуется применить клапаны на большие расходы, у которых постоянная времени из-за инерционности подвижных частей составляет 0,2-0,5 с, что не обеспечивает снятие кратковременных пиков давления (по времени до 0,1 с). Увеличение предельного давления приводит к значительному снижению ресурса гидромашин и гидроприводов в целом.
Целью изобретения является повышение ресурса и надежности ЭГСП.
Цель достигается тем, что в ЭГСП, содержащий последовательно соединенные задатчик входного сигнала, цифровой измеритель рассогласования, первый цифроаналоговый преобразователь, релейный анализатор ошибки, усилитель, первый сумматор, электрогидравлический силовой привод, объект регулирования с цифровым датчиком угла и датчиком скорости, причем выход цифрового датчика угла соединен с вторым входом цифрового измерителя рассогласования, выход датчика скорости соединен с релейным анализатором скорости, выход цифрового измерителя рассогласования через второй цифроаналоговый преобразователь соединен с первым входом второго сумматора и через блок памяти с вторым входом второго сумматора, выход которого через релейный элемент и релейный анализатор скорости соединен с вторым входом первого сумматора, введен интегратор, вход которого соединен с выходом релейного анализатора скорости, а выход - с вторым входом первого сумматора, причем в релейном анализаторе скорости нормально замкнутый контакт соединен с шиной "общий".
Данное техническое решение отвечает критерию "существенные отличия", так как не обнаружено признаков, сходных с признаками, отличающими данное техническое решение от прототипа.
Функциональная схема предлагаемого ЭГСП показана на фиг.2.
ЭГСП состоит из последовательно соединенных задатчика 1 входного сигнала, цифрового измерителя 2 рассогласования, первого цифроаналогового преобразователя 3, релейного анализатора 4 ошибки (состоящего из первого 4.1 и второго 4.2 реле и резистора 4.3), усилителя 5, первого сумматора 6, электрогидравлического силового привода 7 (состоящего из усилителя 7.1 мощности, гидроусилителя 7.2, предохранительных клапанов 7.3 и гидродвигателя 7.4), объекта 8 регулирования с цифровым датчиком 9 угла и датчиком 10 скорости. Выход цифрового датчика 9 угла соединен с вторым входом цифрового измерителя 2 рассогласования, а выход датчика 10 скорости - с релейным анализатором 11 скорости. Выход цифрового измерителя 2 рассогласования через второй цифроаналоговый преобразователь 12 соединен с первым входом второго сумматора 13 и через блок 14 памяти с вторым входом второго сумматора 13, выход которого через релейный элемент 15, нормально разомкнутые контакты релейного анализатора 11 скорости и интегратор 16 соединен с вторым входом первого сумматора 6.
При отработке сигнала малого уровня ЭГСП работает как обычный следящий привод, сигнал с датчика 10 скорости имеет малое значение, при котором релейный анализатор 11 скорости не срабатывает и сигнал на второй вход первого сумматора не поступает. В этом режиме золотник гидроусилителя 7.2 силового привода 7 работает в зоне, не достигая крайних положений (упоров).
При отработке ступенчатого сигнала большого уровня релейный анализатор 4 ошибки обеспечивает, во-первых, уменьшение коэффициента усиления (реле 4.1), во-вторых, запоминание на выходе блока 14 памяти части (около половины) сигнала рассогласования (реле 4.2). В результате с релейного элемента 15 через релейный анализатор 11 скорости, который срабатывает по достижении скоростью объекта 8 регулирования значения 25-30 град/с, подается постоянное значение сигнала на интегратор 16, а с его выхода линейно возрастающий сигнал через второй вход первого сумматора 6 поступает на силовой привод 7, который разгоняет объект 8 регулирования с максимальным ускорением. Когда ЭГСП отработает часть (около половины) рассогласования, сигнал с выхода второго сумматора изменяет знак, меняется знак сигнала и на выходе релейного элемента 15 и релейного анализатора 11 скорости, который поступает на вход интегратора 16, на выходе которого сигнал сначала начинает уменьшаться, доходит до нулевого значения, а затем линейно возрастает, но уже с другим знаком, чем при разгоне объекта 8 регулирования. При перемене знака сигнала на выходе интегратора 16 происходит торможение объекта 8 регулирования. Линейно изменяющийся выход интегратора 16 соединен с вторым входом первого сумматора 6, выход которого подключен к входу электрогидравлического силового привода 7 (вход усилителя 7.1 мощности, выход которого управляет гидроусилителем 7.2). Золотник гидроусилителя 7.2 электрогидравлического силового привода 7 отслеживает линейно изменяющийся сигнал, и изменение перепада давления в полостях гидродвигателя 7.4 силового привода 7 определяется скоростью интегрирования интегратора 16, которая определяется постоянной времени интегратора 16 и величиной выходного сигнала с релейного элемента 15. В свою очередь перепад давлений в полостях гидродвигателя 7.4 силового привода 7 приводит во вращение объект 8 регулирования с определенным ускорением, которое не превышает допустимый момент.
На фиг. 1 кривая II соответствует работе предлагаемого ЭГСП. При этом время переброски золотника гидроусилителя увеличивается в 3,5 раза, а давление уменьшается в 2-2,5 раза, т.е. с времени 0,02 с до 0,07 с. Увеличение времени переброски золотника гидроусилителя на 0,05 с практически не влияет на суммарное время отработки входного сигнала большой величины, которое составляет порядка 3-4 с.
Технический эффект заключается в обеспечении требуемого уровня давлений в гидроприводе, который соответствует заданному для гидропривода ресурсу. Снижение давлений повышает надежность гидропривода ЭГСП большой мощности.
Экономический эффект определяется из сравнения ресурса работы известных и предлагаемого ЭГСП (Смирнова В.И. и др. Основы проектирования и расчета следящих систем. Учебник для техникумов. М.: Машиностроение, 1983).
Фактический ресурс работы ЭГСП
T = T K
K
Ωф, Рф, Ωн, Рн - фактические и номинальные значения скоростей и давлений в гидроприводе;
Кб - коэффициент безопасности, зависящий от характера нагрузки, Кб=1-2,2, для импульсных всплесков давлений Кб=2,2, для плавных изменений Кб=1;
K ε - коэффициент, учитывающий конструктивные особенности ходовых частей гидромашин.
Таким образом, при уменьшении выбросов давлений в 2 раза ресурс гидропривода увеличивается более чем в 64 раза, так как  = 23,33=23,33 и Кб3,33=2,23,33.
= 23,33=23,33 и Кб3,33=2,23,33.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| ЦИФРОВАЯ СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ | 1990 |
|
RU2047890C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| Электрогидравлическая следящая система | 1989 |
|
SU1679075A1 |
| КРУГЛОВЯЗАЛЬНАЯ МАШИНА | 1991 |
|
RU2016936C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2074514C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2155438C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2155437C1 |
Изобретение относится к электрогидравлическим следящим приводам общего назначения и может быть использовано в следящих быстродействующих приводах для управления любым высокоинерционным объектом. Целью изобретения является повышение надежности привода. Электрогидравлический следящий привод содержит задатчик 1 входного сигнала, цифровой измеритель 2 рассогласования, два цифроаналоговых преобразователя 3, 12, релейный анализатор 4 ошибки, усилитель 5, два сумматора 6, 13, электрогидравлический исполнительный механизм 7, объект 8, цифровой датчик 9 угла, датчик 10 скорости, релейный анализатор 11 скорости, блок 14 памяти, релейный элемент 15, интегратор 16. 2 ил.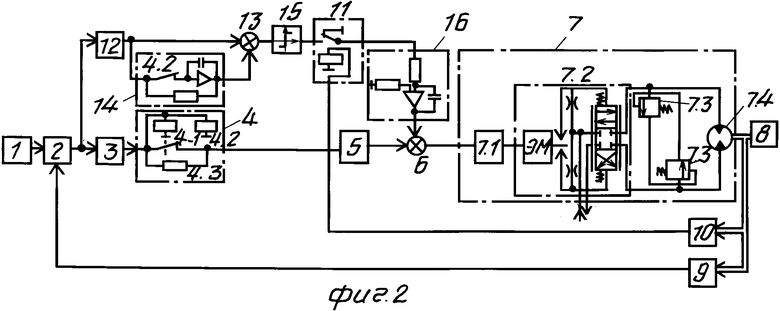
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД, содержащий последовательно соединенные задатчик входного сигнала, цифровой измеритель рассогласования, первый цифроаналоговый преобразователь, релейный анализатор ошибки, усилитель, первый сумматор, электрогидравлический исполнительный механизм, выход которого кинематически связан с объектом регулирования, цифровым датчиком угла и датчиком скорости, причем выход датчика скорости соединен с первым входом анализатора скорости, выход цифрового датчика угла - с вторым входом цифрового измерителя рассогласования, выход которого соединен с входом второго цифроаналогового преобразователя, выходом соединенного непосредственно с первым входом второго сумматора и через блок памяти с вторым входом второго сумматора, выход которого через релейный элемент соединен с вторым входом релейного анализатора скорости, отличающийся тем, что, с целью повышения надежности привода, в него введен интегратор, вход которого соединен с выходом релейного анализатора скорости, а выход - с вторым входом первого сумматора, а релейный анализатор скорости выполнен в виде реле, первый вывод обмотки и размыкающий контакт которого соединены с общей шиной, второй вывод обмотки реле является первым входом релейного анализатора скорости, второй вход которого соединен с замыкающим контактом, а перекидной контакт является выходом релейного анализатора скорости и соединен с входом дополнительно введенного интегратора, выходом соединенного с вторым входом первого сумматора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
