Настоящее изобретение относится к устройствам контроля и диагностики, а более точно касается устройства диагностирования состояния объекта, имеющего электронную систему мониторинга функциональных параметров.
Изобретение может быть использовано для технической диагностики силовых установок летательных аппаратов, судов, автомобилей и прочего промышленного оборудования, имеющего систему непрерывного мониторинга функциональных параметров.
Кроме того, предлагаемое устройство может быть использовано в системах медицинской диагностики, связанных с мониторингом физиологических показателей пациентов, а также в системах глобального информационного обеспечения технологических процессов.
В настоящее время особое значение приобретает идея создания интерактивной человеко-машинной системы, применяемой, в частности, для контроля, диагностики и оперативного прогноза состояния различных объектов.
Основная идея создания гибридных систем анализа заключается в разработке такого информационного взаимодействия оператора с источником информации, при котором в процессе принятия решений используются не только логические уровни сознания человека, но и уровни подсознания, связанные с механизмами творческого образного мышления. При этом наиболее перспективными в прикладном отношении оказались методы зрительного воздействия на подсознание оператора специальными объектами с экрана компьютерного дисплея.
Известны интерактивные системы образной диагностики, в частности, авиационных газотурбинных двигателей, разработанные на основе синтеза методологии образного анализа, логических механизмов экспертных систем и специальных способов формирования исходных параметрических описаний на переходных режимах работы указанных двигателей. Образный анализ, составляющий концептуальную основу интерактивной системы образной диагностики, обеспечивает некритичность системы анализа к структуре и размерности исходных цифровых данных вследствие диалоговой адаптации к описаниям любого вида и, как следствие, эффективное выделение диагностических признаков.
Для известных интерактивных систем необходимо обеспечение строгой повторяемости при каждой реализации диагностической процедуры, в противном случае вместо устойчивых проявлений признаков неисправностей наблюдается процесс потери чувствительности диалоговой системы.
Кроме того, с помощью таких интерактивных систем практически невозможно осуществлять оперативный прогноз технического состояния исследуемого объекта.
Также известно устройство диагностирования состояния объекта, имеющего электронную систему мониторинга функциональных параметров (SU, А, 1617317), содержащее блок памяти, в котором содержится информация о дискретных цифровых значениях функциональных параметров объекта, поступающая из системы мониторинга, цифроаналоговые преобразователи, электрически связанные с блоком памяти и подключенные к блокам формирования контурных плоскостных фигур, подключенным к блоку формирования объемных комбинаций контурных плоскостных фигур, к которому подключен один вход блока визуализации, другой вход которого соединен с пользовательским интерфейсом блока визуализации.
Известное устройство предназначено для диагностирования технического состояния газотурбинных двигателей летательных аппаратов. При этом измерение и запись цифровых значений функциональных параметров производилась с заданной периодичностью при разгоне летательного аппарата на режиме приемистости фиксированной длительности за счет автоматического перемещения рычага управления двигателями в заданном темпе от режима малой тяги до режима максимальной тяги.
Записанные цифровые значения преобразовывались в совокупность геометрических образов в виде непрерывных линий, которые замыкались совокупностью сервисных непрерывных линий до получения замкнутых плоских образов, которые преобразовались в пространственную фигуру, форма поверхности которой несет необходимую диагностическую информацию.
Необходимым условием успешного функционирования известного устройства является его использование на таких режимах работы объекта, на которых обеспечивается строгая однотипность управляющих воздействий на диагностируемый объект, каковым для газотурбинных двигателей летательных аппаратов является режим приемистости.
При этом идентичность получаемых признаков обеспечивается идентичностью перемещения ручки управления двигателем, а роль чувствительного автомата выполняет оператор в лице пилота, который в ряде случаев варьирует управлением (работой двигателя), причем указанные вариации управления и являются негативным признаком, ибо формируемые диагностические признаки варьируют намного сильнее, чем предполагалось. Более того, в ряде случаев вообще невозможно обеспечить строгую идентичность управляющих воздействий. Все это приводит к тому, что снижается чувствительность диагностического устройства.
Кроме того, посредством известного устройства весьма затруднительно, а подчас и невозможно осуществлять надежное прогнозирование технического состояния исследуемого объекта.
Целью изобретения является создание устройства диагностирования состояния объекта, имеющего электронную систему мониторинга параметров, в котором за счет введения нового блока, позволяющего осуществлять диагностику состояния объекта не на заранее выделенных переходных режимах, а в процессе всей работы объекта, повышалась бы чувствительность устройства к ранним признакам неисправностей исследуемого объекта, увеличивалась бы разрешающая способность и появлялась бы возможность использовать устройство для диагностики состояния любых исследуемых объектов, снабженных системой мониторинга функциональных параметров.
Это достигается тем, что устройство диагностирования состояния объекта, имеющее систему мониторинга функциональных параметров, содержащее блок памяти, в котором содержится информация о дискретных цифровых значениях функциональных параметров объекта, поступающая из системы мониторинга, цифроаналоговые преобразователи, электрически связанные с блоком памяти и подключенные к блокам формирования контурных плоскостных фигур, подключенным к блоку формирования объемных комбинаций контурных плоскостных фигур, к которому подключен один вход блока визуализации, другой вход которого соединен с пользовательским интерфейсом блока визуализации, содержит по меньшей мере один блок конвертирования малых цифровых значений функциональных параметров объекта, входом подключенный к одному выходу блока памяти, а выходом к входу соответствующего цифроаналогового преобразователя.
Целесообразно, чтобы блок конвертирования малых цифровых значений функциональных параметров содержал дискриминатор, процессор, первый вход которого подключен к выходу дискриминатора, а на второй вход поступает сигнал с соответствующего выхода блока памяти, и блок задания программы преобразования, подключенный к третьему входу процесса.
Предлагаемое устройство обладает высокой чувствительностью, так как информация о состоянии объекта диагностики снимается не на заранее выделенных и специально оговоренных переходных режимах, а в процессе всей работы. В этом случае за счет введения в устройство блока конвертирования малых цифровых значений фунциональных параметров, а также за счет его конкретного схемного выполнения, осуществляется модификация входного параметра и оператор в процессе диагностирования извлекает из объекта самую точную и достоверную информацию на однотипных участках, так как в этом случае не следует регламентировать входные потоки информации.
Кроме того, работая в режиме диагностики, предлагаемое устройство обеспечивает более высокую степень повторяемости диагностических сигналов, обусловленную методом формирования и, несмотря на зависимость от большого числа неучтенных факторов даже на однотипных переходных режимах диагностики, исключает большие вариации выдаваемого сигнала.
Следует также отметить, что в предлагаемом устройстве увеличена разрешающая способность и повышена чувствительность к ранним признакам неисправностей исследуемого объекта в 7-30 раз по сравнению с известным техническим решением.
Благодаря своей универсальности предлагаемое устройство может быть применено для целей диагностики состояния любых объектов, например, таких, как объекты техники, информационных сетей, биологических объектов и других.
Изобретение поясняется описанием конкретного варианта его выполнения, примерами и прилагаемыми чертежами, на которых на фиг.1 представлена блок-схема устройства диагностирования состояния объекта, имеющего электронную систему мониторинга функциональных параметров; на фиг.2 диаграммы технического состояния двигателей летательного аппарата N 49, полученные с помощью патентуемого устройства; на фиг.3 то же, что на фиг.2, для летательного аппарата N 33; на фиг.4 те же диаграммы, что на фиг.2, полученные с помощью известного устройства (по SU, А, 1617317).
Устройство диагностирования состояния объекта, имеющего электронную систему мониторинга функциональных параметров, содержит блок 1 (фиг.1), в котором содержится (поступает или записана) информация о дискретных цифровых значениях функциональных параметров объекта, поступающая из системы мониторинга (поступление информации условно изображено стрелкой).
Устройство содержит группу цифро-аналоговых преобразователей 2 (в описываемом варианте четыре), количество которых в общем случае определяется числом диагностируемых функциональных параметров объекта, при этом образуется соответствующее количество каналов преобразования.
Устройство содержит по меньшей мере один блок 3 конвертирования малых цифровых значений функциональных параметров объекта, установленный в одном из каналов преобразования и содержащий дискриминатор 4, процессор 5 и блок 6 задания программы преобразования. При этом дискриминатор 4 выполнен с возможностью осуществления процесса вычисления разности между смежными дискретными значениями выбранного параметра и входом подключен к одному выходу блока 1 памяти, а выход к первому входу 7 процессора 5, на второй вход которого поступает непреобразованный сигнал с того же выхода блока 1.
Третий вход 9 процессора 5 подключен к блоку 6 выбора программы преобразования, в соответствии с программой которого задается функционирование процессора 5.
Программа (функция) преобразования определяет траекторию диагностируемого объекта в фазовой плоскости обрабатываемого функционального параметра.
Процессор 5 выделяет определенную область фазовой плоскости функционального параметра, которому соответствует тот канал преобразования параметров объекта, в котором установлен блок 3.
К выходам цифроаналоговых преобразователей 2 подключены блоки 10 формирования контурных плоскостных фигур, с которыми соединен блок 11 формирования объемных комбинаций контурных плоскостных фигур, подключенный к блоку 12 визуализации (дисплею компьютера), на котором изображаются объемные диагностические фигуры, называемые диаграммами состояния объекта.
Оператор 13, имеющий возможность диалогового воздействия на пользовательский интерфейс 14 блок визуализации, фиксирует момент и скорость развития неисправностей по значению деформации контуров геометрических образов и изменения их параметров в сравнении с эталонными диаграммами состояния. Оператор 13 является необходимым элементом человеко-машинной системы, которой по существу является предлагаемое устройство. При этом направление связей с оператором 13 отражает функциональные связи, определяющие информационные потоки и управляющие воздействиями человека.
Устройство образует интерактивную систему оперативного прогноза и диагностики состояния объекта, осуществляющую преобразования функциональных параметров объекта, снятых в любом режиме диагностируемого объекта за любое время функционирования, при котором вся обработанная полезная запись используется диагностической системой для построения объемных фигур на экране дисплея.
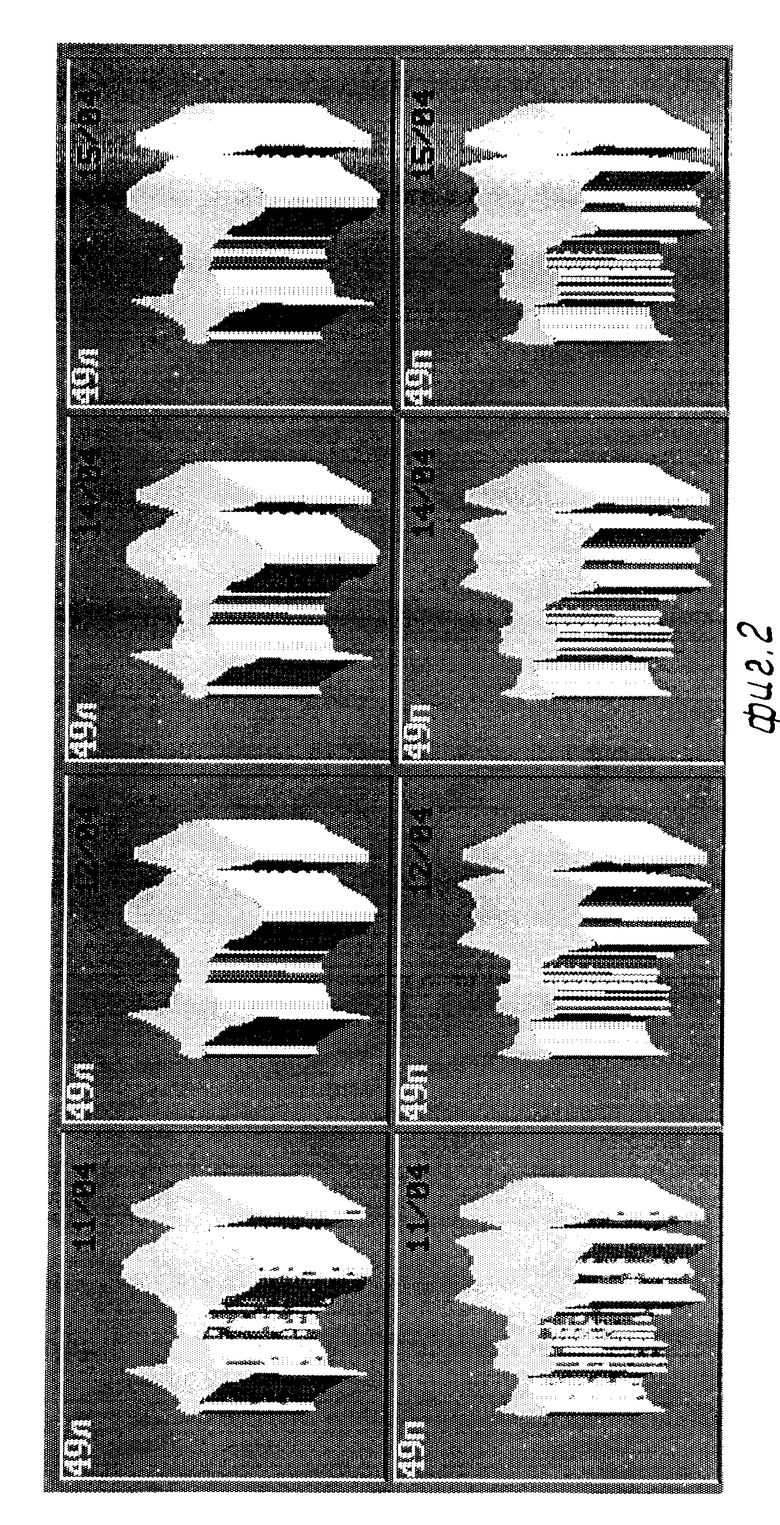
На фиг. 2,3 представлены диаграммы технического состояния двухконтурных турбореактивных двигателей летательного аппарата N 49 и N 33 (номера условные), построенные с помощью предлагаемого устройства диагностирования, причем верхний ряд диаграмм соответствует левому, а нижний правому двигателям.
Фиг. 4 иллюстрирует диаграммы технического состояния для летательного аппарата N 49, построенные с помощью известного устройства (SU, А, 1617317).
Предлагаемое устройство диагностирования состояния объекта, имеющего электронную систему мониторинга функциональных параметров, работает следующим образом.
Входные и выходные функциональные параметры объекта диагностики, поступающие из электронной системы мониторинга, регистрируются в блоке 1 памяти. В описываемом случае, когда имеется один блок 3 конвертирования, из входных параметров выбирается один параметр, который подвергается преобразованию в блоке 3 конвертирования. Как правило, в качестве такого параметра выбирается параметр, наиболее коррелированный с управляющими входными воздействиями.
Сигнал, соответствующий цифровому значению выбранного параметра, поступает непосредственно на вход 8 процессора 5 и на вход дискриминатора 4, в котором осуществляется вычисление разности между текущим и предшествующим значением анализируемого параметра.
Выходной сигнал с дискриминатора 4 поступает на вход 7 процессора 5. Фактически входными сигналами для процессора 5 являются входной сигнал и разностный сигнал, коррелированный с производной исходного сигнала по времени.
По зависимости, формируемой блоком 6 задания программы преобразования, процессор 5 осуществляет преобразование двух входных сигналов в выходной сигнал, иными словами, осуществляется преобразование фазовой плоскости объекта диагностики в соответствии с предварительно заданной функцией, записанной в блоке 6. Конкретный вид этой функции определяется множеством факторов, такими, как особенности объекта контроля, особенности фазовой плоскости устройства, особенности эксплуатационных ограничений, параметры которых подвержены разбросу. Так, например, авиационный двигатель работает в диапазоне температур воздуха от плюс 60 до минус 60оС, диапазоне высот от 0 до 20000 м, в диапазоне частот вращения двигателя от 0 до 10,5 тыс.об/мин и так далее.
На основе эмпирического подбора определяют конкретный вид функции, которая обеспечивает максимальную повторяемость и чувствительность диагностируемых функциональных признаков, отражаемых в блоке 12 визуализации.
Сигнал, соответствующий вычисленному процессором 5 значению параметра, поступает в один цифроаналоговый преобразователь 2, в другие цифроаналоговые преобразователи 2 сигналы из блока 1 памяти поступают в исходном (непреобразованном) виде.
Во всех цифроаналоговых преобразователях 2 цифровые сигналы преобразуются в непрерывные линии и поступают на блоки 10, осуществляющие формирование плоскостных фигур (образов).
При оптимальном задании закона преобразования формируемый в блоке 10 плоский контур становится по признакам формы значительно более чувствительным к устойчивым изменениям состояния диагностируемого объекта, в результате чего сформированные в блоке 11 объемные диаграммы состояния являются более чувствительными к ранним признакам неисправностей исследуемого объекта.
Полученная в блоке 12 визуализации (на экране дисплея) объемная диаграмма состояния является объектом последующего визуального распознавания оператором 13, который на основе сопоставления анализируемого изображения с эталонными изображениями исправного и неисправного состояний принимает решение о виде неисправности и степени ее развития.
Обеспечение предлагаемым устройством стабильной повторяемости результатов исследования (при неизменном состоянии объекта) дает возможность на экране дисплея наблюдать совершенно идентичные диагностические фигуры. Поэтому, применяя в диагностических целях предлагаемое устройство и получая стабильные результаты, можно исключить дополнительные (контрольные) замеры, ибо идентичные образы на экране дисплея свидетельствуют о неизменности состояния объекта. Введение в устройство блока 3 конвертирования увеличило разрешающую способность предлагаемого устройства в сравнении с известными техническими решениями аналогичного назначения, и повысило чувствительность к ранним признакам неисправностей исследуемого объекта по меньшей мере в 7-30 раз, то есть, если известное устройство различает, например, пять состояний исследуемого объекта, то предлагаемое устройство способно различить в среднем 30-50 аналогичных состояний, что позволяет говорить о предлагаемом устройстве как об "устройстве усиления информации".
Осуществление процесса диагностирования состояния объекта в течение всего времени его функционирования, а не на заранее оговоренных переходных режимах, также повышает чувствительность устройства и делает его пригодным для диагностики практически любых объектов, снабженных электронной системой мониторинга.
Предлагаемое устройство не заменяет штатные системы контроля, а является их функциональным дополнением, для надежного выявления начала изменения технического состояния и прогноза эволюции этого изменения. При этом, вследствие высокой достоверности диагностических сигналов устройство позволяет существенно сократить время на процедуру оценки ложных диагностических сообщений систем и увидеть в исходном массиве цифр диагностические сигналы, скрытые для других устройств инструментального контроля.
Для лучшего понимания преимуществ изобретения приводятся конкретные примеры, когда объектами диагностирования являлись авиационные двухконтурные турбореактивные двигатели летательных аппаратов N 49 и N 33.
Устройство было реализовано на базе ПЭВМ 1ВМ-АТ. Первая ПЭВМ посредством устройства сопряжения соединялась с бортовым накопителем полетных данных. Устройство сопряжения содержало стандартный интерфейс передачи данных в ПЭВМ и процессор 7 осуществляющий преобразование цифровых сигналов по заданному закону. В ПЭВМ вводились данные четырех полетов, выполнявшихся 11.04.91, 12.04.91, 14.04.91 и 15.04.91 на самолете N 49 и четырех полетов самолета N 33 20.03.92, 28.03.92, 30.03.92 и 31.03.92. Контуры плоскостных изображений формировались из значений трех параметров: мгновенного расхода топлива, частоты вращения ротора высокого и частоты вращения ротора низкого давлений. Визуализация диагностических данных осуществлялась на экране дисплея в форме объемных диаграмм состояния.
На фиг.2 представлены диаграммы состояния левого двигателя летательного аппарата N 49 (верхний ряд) и правого двигателя (нижний ряд).
Фиг. 3 иллюстрируют аналогичные диаграммы состояния самолета N 33, который был исправен. При сопоставлении диаграмм на фиг.2 и 3 следует, что правый двигатель самолета N 49 содержит две скрытые неисправности: внутреннюю утечку топлива в системе подачи горючего и нарушение регулировки системы управления частоты вращения ротора, проявившиеся в виде резкого изменения формы диаграмм правого двигателя самолета N 49 в сравнении с теми же диаграммами исправного самолета N 33 (фиг.3).
Первый двигатель самолета N 49 также имеет скрытую неисправность в виде нарушения регулировки системы автоматического управления полетом. Соответствующие деформации диаграмм видны на фиг.2 в сравнении с диаграммами, отраженными на фиг.3.
На представленных копиях экрана дисплея (фиг.3) визуализированы диаграммы исправных правого и левого двигателей самолета N 33.
Характерно, что на фиг.4, отражающей диаграммы состояния того же самолета N 49, полученные с помощью известного устройства (SU, А, 1617317), указанные ранее неисправности на этих стадиях не наблюдались и можно было заключить, что летательный аппарат исправен. К тому же неисправности, выявленные посредством патентуемого устройства, совершенно недоступны для выявления системами штатного бортового и наземного контроля.
Из анализа диаграмм состояния самолета N 49 (фиг.2) явствует, что увеличение отклонений по подмеченным неполадкам не наблюдается. Поэтому по указанному летательному аппарату N 49 можно дать прогноз, что в следующем полете (не устранив замеченные неисправности) самолет пока сохранит то же состояние.
Из изложенного выше можно заключить, что предлагаемое устройство есть система ранней диагностики и прогнозирования состояния практически всех видов объектов, имеющих систему мониторинга.



Устройство содержит блок памяти, к одному выходу которого подключен по меньшей мере один блок конвертирования малых значений функциональных параметров объекта, к выходу которого и к остальным выходам блока памяти подключены цифроаналоговые преобразователи, подключенные к блокам формирования контурных плоскостных фигур, к которым последовательно подключены блок формирования комбинаций контурных плоскостных фигур и блок визуализации, с которым связан пользовательский интерфейс, посредством которого оператор имеет возможность взаимодействовать с блоком визуализации. Благодаря наличию блока конвергирования устройство обладает высокой чувствительностью к ранним признакам неисправности объекта, значительной разрешающей способностью и успешно осуществляют диагностику состояния объекта не на заранее выделенных переходных режимах, а в течение всего периода работы объекта. 4 ил.
УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ОБЪЕКТА, ИМЕЮЩЕГО ЭЛЕКТРОННУЮ СИСТЕМУ МОНИТОРИНГА ФУНКЦИОНАЛЬНЫХ ПАРАМЕТРОВ, содержащее блок памяти и по числу диагностируемых параметров объекта каналы преобразования, каждый из которых включает блок формирования контурных плоскостных фигур и группу цифро-аналоговых преобразователей, соединенных входами с соответствующими выходами блока памяти, а выходами с соответствующими входами блока формирования контурных плоскостных фигур, подключенного выходом к соответствующему входу блока формирования объемных комбинаций контурных плоскостных фигур, соединенного выходом с информационным входом блока отображения, подключенного управляющим входом к выходу блока управления выводом отображения, отличающееся тем, что в канал преобразования введен по меньшей мере один блок конвертирования малых цифровых значений функциональных параметров объекта, подключенный входом к соответствующему выходу блока памяти, а выходом к входу соответствующего цифро-аналогового преобразователя, при этом блок конвертирования малых цифровых значений функциональных параметров объекта содержит блок задания программы, процессор и дискриминатор, выход блока задания программы подключен к управляющему входу процессора, выход которого является выходом блока конвертирования малых цифровых значений функциональных параметров объекта, вход дискриминатора объединен с первым информационным входом процессора и является входом блока конвертирования малых цифровых значений функциональных параметров объекта, а выход дискриминатора подключен ко второму информационному входу процессора.
| Способ диагностирования неисправностей газотурбинных двигателей летательных аппаратов | 1989 |
|
SU1617317A1 |
