Изобретение относится к техническим средствам мониторинга оборудования.
Известна многоуровневая автоматизированная система управления производственно-технологическими процессами с управлением затратами на основе мониторинга, анализа и прогноза состояния технологической инфраструктуры нефтегазодобывающего предприятия (RU 2435188, опубл. 27.11.2011). Дополнительно вводится система оперативного мониторинга технической инфраструктуры нефтегазового предприятия, в которой выполняется непрерывный в заданном масштабе времени сбор информации от всех уровней управления объекта о текущем состоянии технологической инфраструктуры. При этом система мониторинга состоит из подсистем адаптации и ввода данных, управления и вывода данных, обработки информации, экспертного анализа, управления и вывода информации, в т.ч. в реальном времени, кроме того имеются двухсторонние каналы передачи данных между входами - выходами подсистем.
Недостатком системы является отсутствие возможности оперативного и гибкого изменения структуры, а также то, что при мониторинге технической инфраструктуры предприятия не выделены диагностические процессы корректировки технического состояния технологических объектов инфраструктуры и все операции по управляющим воздействиям осуществляются вручную диспетчерами или операторами.
Другим аналогом заявленного технического решения является многоканальная акустико-эмиссионная система для диагностики промышленных объектов и устройство реализации и обработки акустико-эмиссионных сигналов (RU 2267122, опубл. 27.12.2005). Многоканальная система с цифровой обработкой и передачей данных состоит из измерительных линий, каждая из которой состоит из измерительных каналов. Каждый канал состоит из преобразователя акустической эмиссии (АЭ) и устройства регистрации и обработки АЭ сигналов и установлен непосредственно на диагностируемом объекте. Устройство регистрации и обработки АЭ сигналов содержит блок питания, блок цифровой обработки и передачи данных в виде контроллера. Выполняется полностью цифровая обработка АЭ сигналов, формируются информационные пакеты, содержащие вычисленные АЭ-параметры и АЭ-осцилограммы с последующей передачей данных по высокоскоростному каналу с возможностью управления от внешнего устройства по стандартному протоколу TCP/IP по проводной и/или беспроводной линии связи.
Система имеет следующие недостатки:
- в составе отсутствует экспертная подсистема, база данных промышленных объектов, подконтрольных акустико-эмиссионной диагностике;
- требуется большое количество устройств регистрации;
- система не конфигурируема по отношению к подконтрольным объектам;
- отсутствует оценка технического состояния подконтрольного объекта по предельным значениям типовых зон «Допустимо», «Требует принятия мер» и «Недопустимо»;
- используется устаревшая техническая база.
Известно автоматизированное устройство мониторинга оборудования электрической подстанции (RU 2613130, опубл. 15.03.2017). Устройство содержит ЭВМ, соединенную с датчиками параметров оборудования. ЭВМ выполнена в виде микропроцессорного блока сбора и обработки данных. Микропроцессор и датчики размещены в одном корпусе, который снабжен блоком питания, индикации и интерфейсным модулем. Датчики соединены с ЭВМ при помощи электрической или волоконно-оптической связи и могут быть выполнены в виде датчиков тока, напряжения и температуры. Микропроцессор содержит микроконтроллер, соединенный с модулем связи Ethernet с рабочим местом оператора.
Недостатки указанного аналога:
- передают не полную информацию об объекте, т.к. используется ограниченное количество датчиков и методов НК (только электрический и тепловой);
низкая универсальность в связи с отсутствием оперативной конфигурационной адаптации к подконтрольному объекту;
- ограниченное применение ввиду специального переносного исполнения устройства.
Также известна система вибрационного контроля, защиты и диагностики технического состояния технологического оборудования (RU 2464486, опубл. 20.11.2012). Система включает автоматизированное рабочее место (АРМ), снабженное компьютером и устройством цветного мнемонического отображения текущего состояния технологического оборудования, и сервер. При этом сервер выполнен с возможностью обнаружения дефектов и выдачи рекомендаций по их устранению в систему автоматизированного управления технологического оборудования через локальные вычислительные сети предприятия. Сервер также соединен через сети и сетевое оборудование с блоком преобразования и обработки сигналов вибрационного контроля и защиты с блоком преобразования и обработки сигналов вибрационного мониторинга и диагностики, которые подсоединены к блокам датчиков через блоки усиления и согласования.
К недостаткам данной системы относятся:
- низкая универсальность, слабая конфигурируемость системы (существует только по данным связи с внешними системами по промышленным сетям);
- отсутствует база данных подконтрольного оборудования;
- не раскрыты реализация алгоритмов диагностики и обработки данных с возможностью раннего обнаружения дефектов отдельных узлов агрегата и выдачи рекомендаций на АРМ по проведению технического обслуживания подконтрольного технологического оборудования.
Известен комплекс программно-аппаратных средств автоматизации управления технологическими процессами (RU 2279117, опубл. 27.06.2006). Комплекс содержит объединенные через локальную сеть Ethernet рабочие станции и серверы на базе персональных компьютеров, а также контроллеры и функциональные модули. Модули реализуют алгоритмы механизма обработки сигналов от датчиков, формирования и управления, адекватных задачам, которые возлагаются на данный модуль. Возможны три варианта построения систем на базе средств комплекса: централизованного управления; локального управления; распределенного управления. Во всех трех вариантах модуль центрального процессора (под управлением программного обеспечения) выполняет начальное конфигурирование функциональных модулей, обмен информацией, контроль и диагностику программных и аппаратных средств.
Основные недостатки известного комплекса:
- ограниченная конфигурация программно-аппаратных средств комплекса, ограниченные возможности применения для целей диагностического мониторинга технологического оборудования;
- не предусмотрено использование комплекса в условиях опасных производственных объектов;
- конфигурация систем распространяется только на виды управления с помощью модуля центрального процессора (централизованное, локальное и распределенное);
- не указан нижний уровень систем (датчики и преобразователи); база, интерфейсы и технология программного обеспечения;
- используется устаревшая элементная база.
Известен способ диагностики и прогнозирования технического состояния машин по вибрации корпуса (RU 2103668, опубл. 27.01.1998). С помощью автоматической диагностики измеряют вибросигналы, характеризующие состояние машин, и в качестве диагностических признаков графически отображают на экране дисплея компьютера, формируют экран «монитор», строя схематическое положение машин и столбиковые указатели диагностических признаков всех измеряемых параметров с отметкой верхних и нижних пороговых значений, автоматически выделяют машины и каналы системы диагностического мониторинга с одновременным их выделением соответствующим цветом, формируют необходимые вспомогательные экраны. Система диагностики, реализующая данный способ, содержит дистанционную станцию диагностики, в которую входит компьютер, дисплей, выносной пульт, принтер, синхронизатор речи и сигналов.
Недостатки системы, реализующей известный способ:
- применен для диагностики только один метод неразрушающего контроля по вибрации;
- система не конфигурируется применительно к типам подконтрольного оборудования, исполнениям, измерительным каналам, то есть не является универсальной.
Известна система, реализующая способ оценки технического состояния центробежного насосного агрегата по вибрации корпуса (RU 2068553, опубл. 27.10.1996). С помощью системы компьютерного мониторинга измеряют в процессе эксплуатации агрегата вибрацию, одновременно от совокупности входящих в агрегат элементов, строят тренды по вибрации. Параметры и тренды используют в качестве диагностических признаков. Предварительно обучают систему компьютерного мониторинга, вводят в нее пороговые значения и комбинации признаков для оценки состояния агрегата и его элементов по табличной зависимости.
При этом используют базу знаний, содержащую пороговые значения признаков и их комбинаций, обусловленные причинно-следственными связями между ними и элементами агрегата.
Система имеет следующие недостатки:
- ограниченное количество применяемых методов неразрушающего контроля;
- отсутствует база данных подконтрольного оборудования;
- не предусмотрена конфигурация системы компьютерного мониторинга для обеспечения возможности ее универсализации.
Известна система управления и мониторинга механизмов (US 7283914, опубл. 16.10.2007). Система содержит полевые устройства (в т.ч. пьезоэлектрические акселерометры, датчики, преобразователи и элементы управления), связанные с контролируемыми машинами (механизмами), подключенными к сборщику данных вибрации, соединенными с диагностической программной системой, включающей базу данных, содержащей данные базовой вибрации для множества различных типов машин в целях сравнения текущих данных вибрации, собранных от машин. Все устройства и элементы связаны через полевую сеть, осуществляющую интеграцию системы автоматизации процессов. Техническое состояние каждой машины, диагностируемой программной системой отражается на мониторе с использованием цветового окрашивания для выделенных состояний и знаков.
К недостаткам системы относится следующее:
- для диагностического мониторинга на полевом уровне используются только датчики вибрации, подключенные к сборщику данных вибрации, другие датчики не применяются;
- процедуры диагностики состояния и определения с помощью диагностической программной системы неисправностей раскрыты поверхностно, недостаточно;
- отсутствует конфигурирование системы на классы объектов, ее исполнения для универсализации системы и снижения издержек на ее настройку под новые объекты;
- не раскрыто использование системы в условиях опасных производственных объектов.
Известна система мониторинга оборудования по патенту РФ на изобретение №2709562, МПК А63Н 27/00, опубл. 18.12.2019 г.
Эта система мониторинга состояния промышленного оборудования включает автоматизированные рабочие места, снабженные компьютером и устройством цветного мнемонического отображения информации, сетевое оборудование, подсистемы, уровни, блоки датчиков, модули обработки сигналов, выполненные с возможностью приема, регистрации сигналов датчиков, и серверы, которые обеспечивают возможность сравнения информации от модулей обработки сигналов с рассчитываемыми и/или внесенными в их память пороговыми значениями.
Недостатки; низкая точность мониторинга.
Известна система мониторинга оборудования по патенту РФ на изобретение №2728167, МПК G01M l5/00, опубл. 18.12.2019 г., прототип.
Эта универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга оборудования опасных производственных и транспортных объектов в реальном времени содержит архитектуру управления, датчики, соединенные с подконтрольным оборудованием, подсистему мониторинга, а также модуль визуализации. Система может быть выполнена в стационарном, мобильном, бортовом, персональном и стендовом исполнении. Используются методы неразрушающего контроля для динамического и статического оборудования. Программное обеспечение нижнего уровня передает результаты измерений в программное обеспечение верхнего уровня. Повышается универсальность системы.
Недостатки низкая точность мониторинга.
Задача создания изобретения: повышение точности мониторинга и прогнозирование аварийной ситуации.
Достигнутые технические результаты: более точное определение параметров мониторинга и прогнозирование аварийной ситуации.
Решение указанной задачи достигнуто в система мониторинга подконтрольного оборудования, содержащая архитектуру управления, датчики, соединенные с подконтрольным оборудованием, подсистему мониторинга, содержащую системный блок с монитором, а также модуль визуализации, установленный на оборудовании или около него, тем, что выход из системного блока соединен сервером 4ГИС, выход которого соединен через приемно-передающее устройство ГИС с подконтрольным оборудованием.
Около подконтрольного оборудования может быть установлено приемно-передающее устройство с приемно-передающей антенной.
Модуль видеонаблюдения может содержать, по меньшей мере, одну видеокамеру, видеоканал, преобразователь видеосигнала.
Подконтрольное оборудование может быть выполнено мобильным.
На подконтрольном оборудовании может быть установлен приемник ГЛОНАСС.
Сущность изобретения поясняется на фиг. 1…3, где:
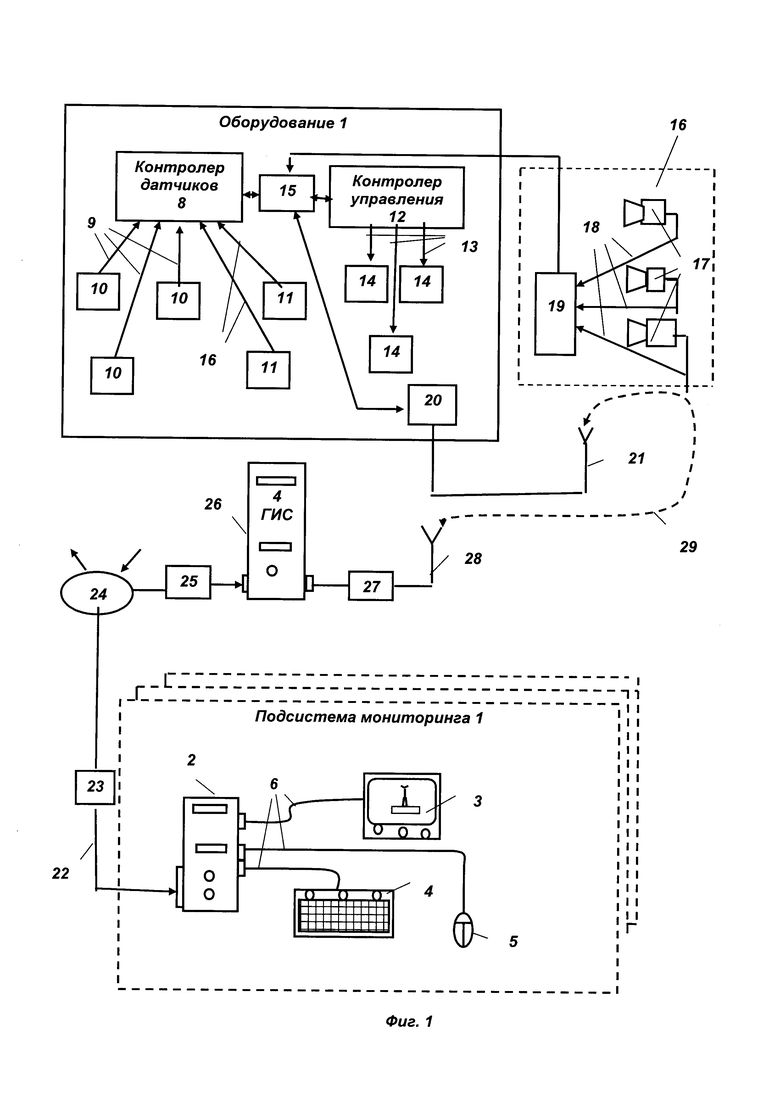
- на фиг. 1 приведена принципиальная схема устройства,
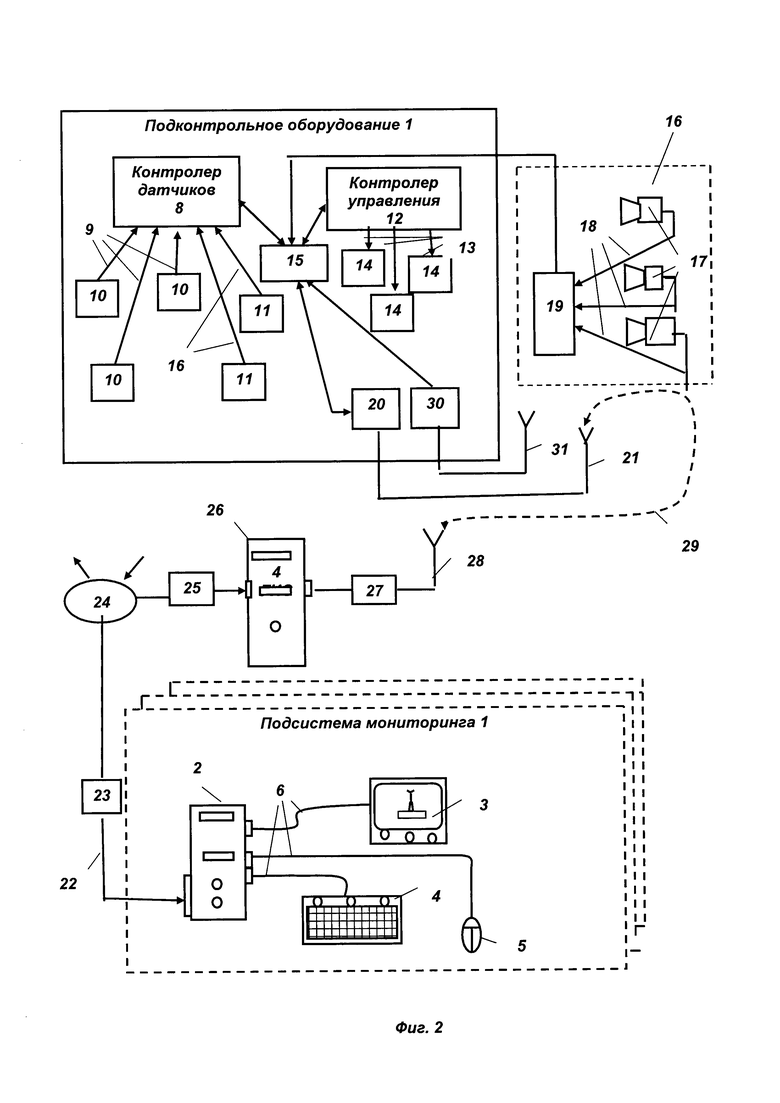
- на фиг. 2 приведена схема мобильного устройства с приемником ГОНАСС.
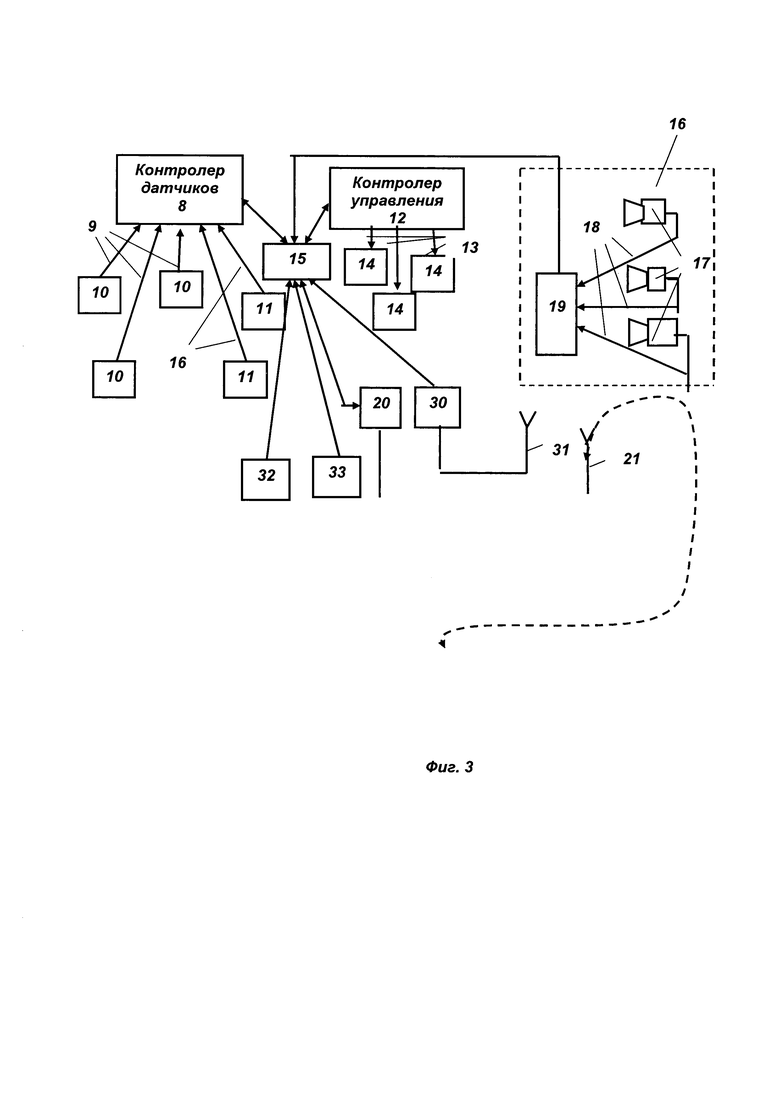
- на фиг. 3 приведена схема мобильного оборудования.
В описании применены следующие обозначения:
подсистема мониторинга 1,
системный блок 2,
монитор 3,
клавиатура 4,
манипулятор типа «Мышь» 5,
внутренняя линия связи 6.
оборудование 7,
контроллер измерения 8,
линия измерения 9,
датчики технического состояния 10,
датчики безопасности 11,
котроллер управления 12,
линия управления 13,
механизмы управления 14,
центральный процессор 15,
модуль видеонаблюдения 16,
видеокамера 17,
видеоканал 18,
преобразователь видеосигнала 19,
приемно-передающее устройство 20,
приемно-передающая антенна 21,
внешняя линия связи 22,
первый модем 23,
сеть Интернет 24,
второй модем 25,
сервер 4ГИС 26,
приемно-передающее устройство ГИС 27,
антенна ГИС 28,
беспроводной канал связи 29,
приемник ГЛОНАСС 30.
антенна ГЛОНАСС 31,
датчик скорости 32,
датчик направления 33.
Система управления подконтрольного оборудования 7 (фиг. 1), содержит несколько подсистем мониторинга 1, состоящих из системного блока 2, монитора 3, клавиатуры 4 и манипулятора типа «Мышь» 5, соединенных внутренними линиями связями 6.
Подсистема мониторинга 1 предназначено для контроля работы оборудования 7.
Орудование 7 содержит контроллер измерения 8, который линиями измерения 9 соединен с датчиками технического состояния 10 и датчиками безопасности 11,
В качестве датчиков технического состояния 10 могут быть использованы датчики температуры, давления, вибраций и пульсаций. В качестве датчиков безопасности 11 - датчик движения и др.
Кроме того, на оборудовании 7 установлен котроллер управления 12, который линиями управления 13 соединен с механизмами управления 14.
Контроллер датчиков 8 и контроллер управления 12 соединены с входами в центральный процессор 15,
Кроме того, на подконтрольном оборудовании 7 и/или около него установлен модуль видеонаблюдения 16.
Модуль видеонаблюдения 16 содержит, по меньшей мере одену видеокамеру 17, видеоканал 18, преобразователь видеосигнала 19. В качестве преобразователя видеосигнала 19 может быть использована плата видеозахвата или мультиплексор.
Около подконтрольного оборудования 7 установлено приемно-передающее устройство 20 с приемно-передающей антенной 21,
Системный блок 2 внешней линией связи 22 через первый модем 23, сеть Интернет 24, второй модем 25 соединен с сервером 4ГИС 26, Сервер 4ГИС 26 соединен с приемно-передающим устройство ГИС 27 к которому присоединена антенна ГИС 28, соединенная беспроводным каналом связи 29 с приемно-передающей антенной 21.
К системному блоку 2 присоединен сервер системы 4 ГИС 26 с базой цифровых клонов объектов.
Понятие цифровой двойник (цифровой клон - ЦК) связано с представлением большого количества данных, для стационарного подконтрольного оборудования 7 или мобильного оборудования в виде транспортного средства в трехмерной ГИС, ретроспективной и перспективной во времени («цифровой двойник» системы), т.е. в системе 4ГИС.
На фиг. 2 приведена система мониторинга для мобильного оборудования 7, например, транспортного средства. Система мониторинга дополнительно содержит приемник ГЛОНАСС 30 и антенну ГЛОНАСС 31.
На фиг. 3 приведена схема мобильного оборудования. Она содержит датчики скорости 32 и датчики направления 33.
На фиг. 3 приведена схема мобильного оборудования. Она содержит датчики скорости 32 и датчики направления 33.
РАБОТА СИСТЕМЫ
При работе системы (фиг. 1) включают все подконтрольное оборудование 7 и системный блок 2.
Подконтрольное оборудование 7 содержит контроллер измерения 8, который линиями измерения 9 соединен с датчиками технического состояния 10 и датчиками безопасности 11,
Кроме того, на подконтрольном объекте 7 установлен котроллер управления 12, который линиями управления 13 соединен с механизмами управления 14.
Контроллер датчиков 8 и контроллер управления 12 соединены с входами в центральный процессор 15,
Кроме того, на подконтрольном оборудовании 7 и/или около него установлен модуль видеонаблюдения 16.
Модуль видеонаблюдения 16 одержит по меньшей мере одену видеокамеру 17, видеоканал 18, преобразователь видеосигнала 19.
Около подконтрольного оборудования 7 установлено приемно-передающее устройство 20 с приемно-передающей антенной 21,
Системный блок 2 внешней линией связи 22 через первый модем 23, сеть Интернет 24, второй модем 25 соединен с сервером 4ГИС 26, Сервер 4ГИС 26 соединен с приемно-передающим устройство ГИС 27 к которому присоединена антенна ГИС 28, соединенная беспроводным каналом связи 29 с приемно-передающей антенной 21
На фиг. 2 приведена система мониторинга для мобильного подконтрольного оборудования 7, например, транспортного средства.
Она дополнительно содержит приемник ГЛОНАСС 30 и антенну ГЛОНАСС 31. Антенна ГОНАСС 31 принимает сигнал со спутников ГЛОГАСС и вычисляет место положения мобильного подконтрольного оборудования 7.
При реализации ЦК обеспечивает создание, наполнение и сопровождение многоформатного полноценного «цифрового двойника» физического объекта и транспортной инфаструктуры для оптимизации ее геопривязанной модели в реальном времени, используя интегрированное мультифизическое, многомасштабное, вероятностное моделирование различных систем, стационарных и подвижных объектов, которое использует лучшие доступные физические модели, обновления датчиков, историю, результаты прогнозов и многое другое.
Трехмерное моделирование в ГИС есть не просто имитация реальности, а инструмент анализа, моделирования и публикации трехмерных геопривязанных пространственных данных, а также обоснования принятия решений относительно объектов и субъектов управляющего воздействия. Для получения качественной 3D-модели в ИП используются все доступные типы данных (рельеф, изображения местности или дна, текстура, модели зданий и сооружений, дорог и пр.) любых ГИС (OpenStreetMap, ArcGIS, ИнГео, Панорама), после привязки к координатам (широта, долгота и высота) и внесении дополнительных геопространственных и атрибутивных данных, получаем 3D ГИС. При рассмотрении совокупности 3D-моделей в разрезе времени (история или прогноз) имеем четвертое измерение - позволяющее видеть ретроспективу объекта или моделировать будущие его состояния в геоинформационной системе - 4D ГИС.
Применение изобретения позволило:
Определять аварийную ситуацию подконтрольного оборудования.
Прогнозировать аварийную ситуацию в будущее с высокой точностью.
На базе ЦК предлагается создание подробной 4D ГИС местности и цифровых клонов, обменивающихся информацией с объектами транспортной инфраструктуры и транспортными средствами посредством беспроводной связи.
Наземных транспортных средств, в том числе беспилотных, с передачей данных (ЦКМО), что позволяет автомобилю видеть и анализировать дорожную обстановку как с рядом собой, в непосредственной близости, так и в любом масштабе, с выдачей рекомендаций по вождению водителям или управлением беспилотным транспортом и обменом данными:
Скорость,
Направление,
Координаты,
Окружающая обстановка, полученная от бортовых камер, лидаров, радаров и т.д.
Возможно моделирование и прогнозирование событий в перспективе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга для управления состоянием и предупреждения аварий оборудования опасных производственных и транспортных объектов | 2019 |
|
RU2728167C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНИКОМ | 2020 |
|
RU2770251C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| ГЕОИНФОРМАЦИОННАЯ СИСТЕМА В ФОРМАТЕ 4D | 2017 |
|
RU2667793C1 |
| Система для мониторинга искусственных сооружений высокоскоростной магистрали | 2018 |
|
RU2698419C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
Изобретение относится к мониторингу оборудования. Система мониторинга состояния оборудования содержит архитектуру управления, датчики, соединенные с подконтрольным оборудованием, подсистему мониторинга, содержащую системный блок с монитором, а также модуль визуализации, установленный на оборудовании или около него. Выход из системного блока соединен с сервером 4D ГИС, выход которого соединен через приемно-передающее устройство ГИС с подконтрольным оборудованием. Повышается точность определения параметров. 4 з.п. ф-лы, 3 ил.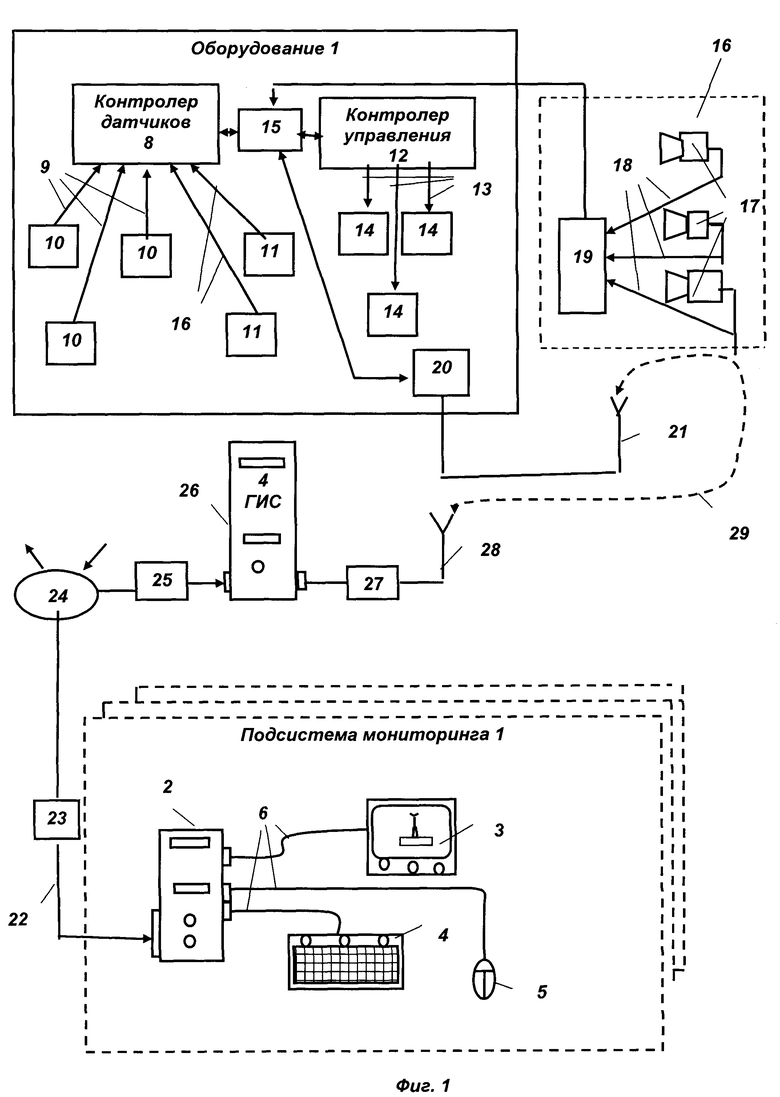
1. Система мониторинга состояния оборудования, содержащая архитектуру управления, датчики, соединенные с подконтрольным оборудованием, подсистему мониторинга, содержащую системный блок с монитором, а также модуль визуализации, установленный на оборудовании или около него, отличающаяся тем, что выход из системного блока соединен с сервером 4D ГИС, выход которого соединен через приемно-передающее устройство ГИС с подконтрольным оборудованием.
2. Система мониторинга состояния оборудования по п. 1, отличающаяся тем, что около подконтрольного оборудования установлено приемно-передающее устройство с приемно-передающей антенной.
3. Система мониторинга оборудования по п. 1, отличающаяся тем, что модуль видеонаблюдения содержит, по меньшей мере, одну видеокамеру, видеоканал, преобразователь видеосигнала.
4. Система мониторинга состояния оборудования по п. 1, отличающаяся тем, что оборудование выполнено мобильным.
5. Система мониторинга состояния оборудования по п. 4, отличающаяся тем, что на подконтрольном оборудовании установлен приемник ГЛОНАСС.
| Автоматизированная система контроля технического состояния локомотивных радиостанций | 2016 |
|
RU2634060C1 |
| US 8229163 B2, 24.07.2012 | |||
| US 8195343 B2, 05.06.2012 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга для управления состоянием и предупреждения аварий оборудования опасных производственных и транспортных объектов | 2019 |
|
RU2728167C1 |

