Изобретение относится к приборостроению, а именно к угловым многокоординатным вибродвигателям для навигационного оборудования.
Известен привод микроманипулятора по авторскому свидетельству СССР N 541663, B 25 J 7/00, 1977 г., содержащий устройство прямолинейного перемещения и поворота, связанное с корпусом, выполненное в виде пьезоэлектрического преобразователя, состоящего из трех взаимно параллельных стержней, два из которых жестко закреплены в корпусе, а третий подпружинен к сферическому элементу, расположенному между этими стержнями. Этот привод обеспечивает три степени подвижности сферическому элементу с присоединенной к нему механической рукой манипулятора. Длина стержней подобрана таким образом, что при возбуждении резонансных колебаний в ней укладывается одна полная длина волны, а частота продольных колебаний стержней равна частоте радиальных колебаний сферического элемента. Недостатком этого привода является то, что сферический элемент удерживается между тремя параллельными стержнями только за счет сил трения, поэтому возможно смещение центра сферического элемента вдоль стержней, что ведет к низкой эффективности позиционирования, усложнению наладки микроманипулятора и снижению надежности работы такого устройства.
Известен пьезоэлектрический вибродвигатель с тремя вращательными степенями подвижности (см. Бансявичус Р.Ю., Рагульскис К.М. Вибродвигатели. Вильнюс, Изд. Мокслас, 1981, стр.123), содержащий корпус с установленными в нем тремя парами пьезоэлектрических преобразователей в виде стержней из пьезокерамики, которые охватывают с трех сторон полый пьезокерамический шар, резонансная частота колебаний которого равна частоте второй формы продольных колебаний стержней, а частоты изгибных резонансных колебаний стержней в плоскости, касательной к сферическому преобразователю, равны собственной частоте второй формы продольных колебаний стержней. Один из находящихся в каждой плоскости преобразователей подпружинен, обеспечивая таким образом силовое замыкание звеньев. Стержневые преобразователи прикрепляются к корпусу в узловых плоскостях. В каждой паре преобразователи работают со сдвигом фаз на 180o. Однако такой вибродвигатель является сложным в изготовлении и наладке из-за необходимости согласования изгибных и продольных резонансных частот стержней и шара. Кроме того, для обеспечения работы устройства необходимо подавать электрическое напряжение на вращающийся пьезокерамический шар, что снижает надежность устройства.
Наиболее близким по технической сущности к заявляемому является многокоординатный пьезодвигатель или вибропривод со многими степенями свободы по патенту США N 5872417, H 01 L 41/08, 1999 г., содержащий прикрепленный к корпусу вибратор с установленными на нем толкателями и подвижный элемент, имеющий криволинейную поверхность, которая контактирует с толкателями для осуществления относительного перемещения подвижного элемента по отношению к вибратору. Вибратор содержит плоский упругий элемент в форме рамы, на котором на определенных позициях закреплены толкатели, и электромеханические преобразователи (пьезоэлементы), размещенные на упругом элементе. Подвижный элемент выполнен в виде сферы (сферического ротора) или полусферы. Для прижима подвижного элемента к толкателям в виброприводе предусмотрен прижимной элемент, выполненный в виде подшипника скольжения, подпружиненного к корпусу. Согласно примерам осуществления вибропривода упругий элемент может быть выполнен в форме многоугольной рамы с попарно параллельными сторонами, в форме четырехугольной рамы или в форме кольца. Рама упругого элемента прикреплена к корпусу в средней части каждой ее стороны, а в случае кольцевой формы - в точках, отстоящих друг от друга на 90o. При этом толкатели установлены на упругом элементе в углах рамы, а на кольцевом элементе - в точках, также отстоящих друг от друга на 90o и размещенных между точками крепления.
В указанном многокоординатном пьезодвигателе, принятом за прототип, при возбуждении пьезопреобразователей управляющим напряжением в упругом элементе возникают и продольные, и изгибные колебания, которые передают движущие усилия через толкатели на подвижный элемент.
Однако при этом необходимо, как отмечалось выше, возбуждать и согласовывать различные моды продольных и изгибных колебаний сторон рамы вибратора, что является весьма сложной задачей. Это приводит к усложнению изготовления и наладки устройства и снижению эффективности его работы из-за существенной разности добротностей колебательных систем, работающих на продольных и изгибных колебаниях.
Из-за того, что крепление вибратора к корпусу находится не в углах рамы, а в средней части ее сторон, в пьезопреобразователях наряду с продольными и изгибными будут возникать и паразитные крутильные колебания. Это может привести к возникновению узлов колебаний в точках крепления толкателей к вибратору, т. е. в такой точке толкатель не будет воздействовать на сферический ротор, что повлечет за собой снижение точности позиционирования, а значит и надежности работы устройства. Чтобы бороться с паразитными колебаниями, необходимо обеспечить отсутствие узлов колебаний в таких точках, что ведет также к усложнению изготовления и наладки вибропривода.
Кроме того, в указанном устройстве предусмотрено наличие как минимум четырех точек контакта толкателей вибратора со сферическим ротором. А между тем известно, что при количестве точек контакта более трех (в одной секущей плоскости) распределение сил давления в этих точках будет зависеть от точности изготовления сферы и размеров концевой части толкателей, поэтому точность отработки углов поворота сферы в различных направлениях будет разная, что может привести к ошибкам позиционирования вибропривода и тем самым снижает надежность его работы.
Изобретение решает задачу упрощения изготовления и наладки устройства, повышения эффективности его работы и надежности в целом.
Для этого в многокоординатном пьезодвигателе, содержащем закрепленный в корпусе вибратор, выполненный в виде плоского упругого элемента в форме многоугольной рамы с установленными на нем пьезоэлементами и толкателями, сфероидальный ротор, контактирующий с толкателями, и прижимной элемент для прижима сфероидального ротора к толкателям вибратора, упругий элемент жестко закреплен в корпусе в угловых частях рамы, толкатели установлены по одному в средней части каждой стороны рамы, а прижимной элемент выполнен в виде дополнительного вибратора, установленного в корпусе с возможностью скользящего контакта со сфероидальным ротором.
Рама вибратора может быть выполнена в виде равностороннего треугольника. Пьезоэлементы установлены попарно на каждой стороне рамы вибратора на одинаковом расстоянии от толкателя с обеих сторон упругого элемента, при этом каждая сторона рамы представляет собой биморфный преобразователь.
Собственная частота второй формы изгибных колебаний каждой стороны рамы вибратора (пьезопреобразователей) кратна собственной частоте первой формы их изгибных колебаний. В частном случае частота второй формы изгибных колебаний пьезопреобразователей в два раза выше собственной частоты первой формы их изгибных колебаний.
Кроме того, дополнительный вибратор выполнен аналогично основному вибратору и установлен симметрично последнему, а плоскости рам основного и дополнительного вибраторов параллельны.
Сфероидальный ротор может быть выполнен в виде сферы либо в виде двух частей сферы, оси вращения которых совпадают, соединенных между собой жесткими элементами, либо в ином виде.
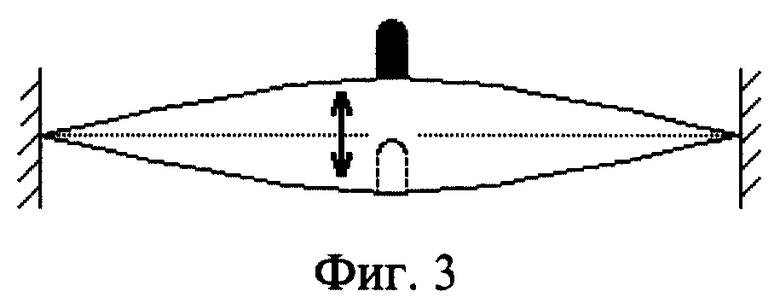
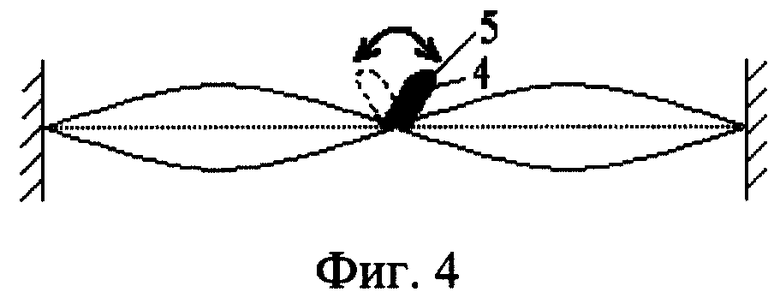
Изобретение поясняется чертежами, где на фиг. 1 схематически показано устройство многокоординатного пьезодвигателя, на фиг. 2 показан биморфный пьезопреобразователь с толкателем, на фиг. 3 изображены крайние положения биморфного пьезопреобразователя при работе на частоте первой формы изгибных колебаний, на фиг. 4 - крайние положения биморфного пьезопреобразователя при работе на частоте второй формы изгибных колебаний, на фиг. 5 - пример исполнения в изометрии пьезодвигателя с треугольной рамой вибратора.
Многокоординатный пьезодвигатель содержит корпус 1 с установленным в нем основным нижним вибратором 2, выполненным из скрепленных по концам упругих элементов 3, например из металлических или пластиковых полос, которые образуют равностороннюю, например треугольную, раму. В средней части каждого упругого элемента 3 закреплены толкатели 4 со сферическими наконечниками 5, которые могут быть выполнены как за одно целое с толкателями, так и в виде отдельных, установленных на толкателях сферических элементов (на чертежах не показано). На обеих сторонах каждого упругого элемента 3 закреплены попарно на одинаковом расстоянии от толкателей 4 пьезоэлектрические элементы 6 и 7, образуя при этом биморфные пьезопреобразователи. Вибратор 2 закреплен в корпусе 1 в вершинах рамы и контактирует со сфероидальным ротором 8 посредством сферических наконечников 5 толкателей 4. Дополнительный верхний вибратор 9 по конструкции выполнен аналогично нижнему вибратору 2 и установлен симметрично ему относительно сфероидального ротора 8 таким образом, что плоскость его рамы параллельна плоскости рамы нижнего вибратора 2. При этом вибратор 9 поджимается к сфероидальному ротору 8 с помощью пружин 10, установленных в корпусе 1, через жесткую скобу 11, которая прикреплена к вибратору 9 также в вершинах треугольной рамы. Такая установка позволяет равномерно распределить усилия прижима по всем точкам контакта со сфероидальным ротором 8.
В зависимости от области использования пьезодвигателя сфероидальный ротор 8 может быть выполнен в виде полной сферы либо в виде двух частей сферы, оси вращения которых совпадают, соединенных между собой жесткими элементами (например, элементами оптической системы), либо в ином виде, предполагающем наличие двух частичных сферических поверхностей, имеющих одну ось вращения и контактирующих с толкателями вибраторов.
Пьезоэлементы 6 и 7 вибраторов 2 и 9 подключены к электрическому генератору 12 гармонических колебаний и делителю частоты 13 через фазоинвертор 14 и коммутирующее устройство 15.
Многокоординатный пьезодвигатель работает следующим образом. При вращении сфероидального ротора 8 вокруг вертикальной оси все пьезоэлементы 6, 7 вибратора 2 подключены к генератору 12, настроенному на частоту f2, равную собственной частоте второй формы изгибных колебаний соответствующего биморфного пьезопреобразователя. В этом случае сферический наконечник 5 толкателя 4 колеблется по дугообразной траектории, показанной на фиг. 4. При этом все пьезоэлементы 6, 7 верхнего вибратора 9, подключенные к генератору 12 через делитель частоты 13, получают электрическое гармоническое напряжение с частотой, кратной f2, например f1 = f2, которая равна собственной частоте первой формы изгибных колебаний биморфных пьезопреобразователей. В этом случае сферические наконечники 5 толкателей 4 верхнего вибратора 9 будут иметь прямолинейную траекторию колебаний, как показано на фиг. 3. В результате этого в момент времени, когда верхние биморфные пьезопреобразователи будут иметь максимальный прогиб вниз, сфероидальный ротор 8 будет максимально прижат к сферическим наконечникам 5 толкателей 4 нижнего вибратора 2, имеющим, например, движение в этот момент по часовой стрелке (фиг. 4). Таким образом, ротору 8 будет сообщен импульс силы, обеспечивающий его вращение против часовой стрелки вокруг вертикальной оси. Так как частота колебаний верхнего вибратора 9 в два раза ниже частоты колебаний нижнего вибратора 2, то в течение следующего периода колебаний нижнего вибратора 2 сфероидальный ротор 8 не будет получать импульса силы из-за малого прижима верхних сферических наконечников 5 к ротору 8. Для изменения направления вращения сфероидального ротора 8 необходимо с помощью коммутатора 15 и фазоинвертора 14 изменить фазу колебаний верхнего вибратора 9 на 180o.
Для обеспечения вращения сфероидального ротора 8 вокруг одной из горизонтальных осей напряжение с частотой f1 подается только на один из биморфных пьезопреобразователей нижнего вибратора 2. В этом случае ротор 8 получает под действием косого удара импульс силы, заставляющий его вращаться вокруг горизонтальной оси, параллельной работающему биморфному пьезопреобразователю. В момент удара все верхние сферические наконечники 5 должны быть в крайнем верхнем положении, не мешая вращению ротора в нужном направлении. Это достигается также за счет работы фазоинвертора 14.
Таким образом, возможно вращение сфероидального ротора вокруг любой из трех горизонтальных осей, параллельных сторонам нижнего вибратора 2, и вокруг вертикальной оси. Последовательно или одновременно управляя работой фазоинвертора 14 и коммутатора 15, можно получить любую траекторию движения сфероидального ротора 8.
В заявляемом многокоординатном пьезодвигателе, в отличие от прототипа, благодаря тому, что упругий элемент вибратора жестко закреплен в корпусе в угловых частях рамы, а толкатели установлены в средней части каждой стороны рамы, в пьезопреобразователях будут возникать только изгибные колебания. При этом для обеспечения движения сфероидального ротора в заданном направлении собственная частота второй формы изгибных колебаний биморфных пьезопреобразователей устанавливается кратной (например, в два раза выше) частоте первой формы изгибных колебаний, что легко достижимо при наладке, например, при помощи шлифовки одной из сторон какого-либо биморфного пьезопреобразователя. Тем самым обеспечивается упрощение изготовления и наладки пьезодвигателя в целом и отдельных его частей.
Кроме того, в отличие от прототипа в заявляемом устройстве вместо пассивного прижимного элемента симметрично одному (основному) установлен другой (дополнительный) вибратор, причем плоскости их рам параллельны. За счет того, что определенные пьезопреобразователи основного вибратора работают на второй форме изгибных колебаний, а пьезореобразователи дополнительного вибратора работают на первой форме изгибных колебаний и эти частоты кратны, то совместное действие обоих вибраторов обеспечивает вращение сфероидального ротора в нужном направлении с высокой степенью точности позиционирования устройства, что позволяет в совокупности с вышеприведенными отличительными признаками повысить надежность его работы.
Кроме того, в заявляемом пьезодвигателе, в отличие от прототипа, за счет того, что рама, образованная биморфными пьезопреобразователями, выполнена в виде равностороннего треугольника и на каждой ее стороне закреплено по толкателю, контактирующему со сфероидальным ротором, количество точек контакта вибратора в целом равно трем. Таким образом достигается равенство сил давления в точках контакта независимо от точности изготовления указанных элементов устройства и, следовательно, значительно упрощается управление вращением сферического ротора и повышается надежность работы пьезодвигателя.
Заявляемый многокоординатный пьезодвигатель предназначен, в основном, для применения в космической навигационной технике, а сфероидальный ротор может быть оснащен оптической системой для наблюдения за космическими объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОДВИГАТЕЛЬ | 2008 |
|
RU2376697C1 |
| ПЬЕЗОДВИГАТЕЛЬ | 2018 |
|
RU2686091C1 |
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК | 2013 |
|
RU2546968C1 |
| СЕЙСМОПРИЕМНИК РЕЗОНАНСНЫЙ СКАНИРУЮЩИЙ | 2016 |
|
RU2635399C1 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| ВИБРОКОНВЕЙЕР ДЛЯ МИНИАТЮРНЫХ ДЕТАЛЕЙ | 1993 |
|
RU2069162C1 |
| ПЛАСТИНЧАТЫЙ РАСПЫЛИТЕЛЬ ЖИДКОСТИ | 2014 |
|
RU2577582C1 |
| Широкополосный резонансный сейсмоакустический приемник | 2016 |
|
RU2660768C2 |
| Комбинированный приемник для регистрации дыхательных звуков на поверхности грудной клетки | 2016 |
|
RU2611735C1 |
| ВИБРОДВИГАТЕЛЬ | 1991 |
|
RU2050038C1 |
Изобретение относится к приборостроению, а именно к угловым многокоординатным вибродвигателям для навигационного оборудования, и обеспечивает вращение сфероидального ротора вокруг его центра по любой траектории. Изобретение решает задачу упрощения изготовления и наладки устройства, повышения эффективности его работы и надежности в целом. Многокоординатный пьезодвигатель содержит закрепленный в корпусе вибратор, выполненный в виде плоского упругого элемента в форме многоугольной рамы с установленными на нем пьезоэлементами и толкателями, сфероидальный ротор, контактирующий с толкателями, и прижимной элемент для прижима сфероидального ротора к толкателям вибратора. Упругий элемент жестко закреплен в корпусе в угловых частях рамы. Толкатели установлены по одному в средней части каждой стороны рамы. Прижимной элемент выполнен в виде дополнительного вибратора, установленного в корпусе с возможностью скользящего контакта со сфероидальным ротором. Рама вибратора может быть выполнена в виде равностороннего треугольника, а пьезоэлементы установлены попарно на каждой стороне рамы вибратора на одинаковом расстоянии от толкателя с обеих сторон упругого элемента, то есть каждая сторона рамы представляет собой биморфный преобразователь. Кроме того, дополнительный вибратор выполнен аналогично основному вибратору и установлен симметрично последнему, причем плоскости рам основного и дополнительного вибраторов параллельны. Сфероидальный ротор может быть выполнен в виде сферы либо в виде двух частей сферы, оси вращения которых совпадают, соединенных между собой жесткими элементами, либо в ином виде. 10 з.п.ф-лы, 5 ил.
| US 5872417, 16.02.1999 | |||
| Привод | 1975 |
|
SU541663A1 |
| Микроманипулятор | 1989 |
|
SU1823806A3 |
| US 4727278, 23.02.1988. | |||

