Изобретение относится к радиолокации и может быть использовано, например, в радионавигации, метеорологии, геодезии.
Известно устройство определения вектора скорости движения объекта, которое предполагает использование закономерностей представления вектора ускорения и вектора абсолютной угловой скорости вращения трехгранника Френе в проекциях на оси подвижной системы координат, связанной с летательным аппаратом. Однако устройство применимо лишь в навигационных системах.
Известно устройство определения вектора скорости движения объекта, измеряющее доплеровскую скорость с последующей ее обработкой. Недостатком устройства является необходимость измерения на приемном пункте радиальной скорости или дальности до объекта, что не всегда применительно для систем пассивной локации.
Наиболее близким по технической сущности к изобретению является устройство пассивной локации движущегося объекта, позволяющее определять направляющие косинусы вектора скорости равномерного и равноускоренного движений объекта, содержащее пеленгатор, синхронизатор.
Однако такое устройство имеет ограниченные функциональные возможности, так как не позволяет определять направляющие косинусы вектора скорости криволинейного движения объекта.
Цель изобретения расширение функциональных возможностей за счет одновременного определения направления криволинейного движения объекта.
Это достигается тем, что в устройство пассивной локации движущегося объекта, содержащее пеленгатор, синхронизатор, введены блок формирования коэффициентов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок медианного оценивания, блок вычисления направляющих косинусов вектора скорости криволинейного движения объекта, при этом первый выход пеленгатора соединен с входом синхронизатора, второй выход пеленгатора соединен с входом блока формирования коэффициентов, выход которого соединен с первым входом буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого соединен с первым входом блока медианного оценивания, выход которого соединен с первым входом блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта, выход которого является выходом устройства, первый, третий выходы синхронизатора соединены соответственно с вторыми входами буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, второй выход синхронизатора соединен с вторым входом блока медианного оценивания и с третьим входом блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта, выход буферного запоминающего устройства соединен с вторым входом блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта.
Известно устройство (прототип) определения направляющих косинусов вектора скорости по оценкам угловых координат и их производных по времени при условии, что объект движется по прямой равномерно или равноускоренно. Однако на практике данная модель движения имеет ограниченное применение, поскольку она справедлива лишь на небольших временных интервалах.
Пусть в декартовой ОХYZ системе координат, начало которой совпадает с геометрическим центром пеленгатора, кинематика цели описывается временным полиномом k-го порядка
x aiti, y
aiti, y biti, z
biti, z citi, (1)
citi, (1)
где dai/dt dbi/dt dci/dt 0 ∀i  .
.
Полагаем также, что с пеленгатором связана локальная радиотехническая система координат, в которой линия положения объекта в каждый момент времени задается пеленгами α,β, где α,β азимут и угол места лоцируемого объекта соответственно. С учетом того, что х R˙соsαcosβ yR˙sinαcosβ z R˙sinβ, где R наклонная дальность, на основании выражения (1) запишем





 j ∈
j ∈  (2)
(2)
где aj ≠ 0.
После несложных преобразований представим выражения (2) в эквивалентной форме
 (3)
(3)
Очевидно, что для нахождения неизвестных величин bi/aj, сi/aj,i= , ai/aj,i=
, ai/aj,i= , i ≠j с учетом выражения (3) достаточно решить следующие системы линейных алгебраических уравнений:
, i ≠j с учетом выражения (3) достаточно решить следующие системы линейных алгебраических уравнений:


 (4)
(4)
 (5)
(5)
где αkα (tk), βk β(tk), k ∈  , tk моменты времени, в которые производится замер пеленгов.
, tk моменты времени, в которые производится замер пеленгов.
Таким образом, с учетом выражений (4), (5) расчетные соотношения для определения искомых направляющих векторов криволинейного движения объекта имеют сле-
дующий окончательный вид:
 (6)
(6)
где искомые величины ak/aj, bk/aj, ck/aj находятся как решения систем линейных алгебраических уравнений (4), (5). При записи формул системы (6) учитывалось, что
x(i)= 
 tk-iak, y(i)=
tk-iak, y(i)= 
 bk
bk
z(i)= 
 tk-ick.
tk-ick.
Таким образом, новизна заявляемой системы пассивной локации движущегося объекта состоит во введении дополнительно блока формирования коэффициентов, буферного запоминающего устройства, блока решения систем линейных алгебраических уравнений, блока медианного оценивания, блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта и в организации взаимодействия между ними.
Введение дополнительных блоков и связей позволяет в совокупности с общими признаками обеспечить одновременное измерение направления криволинейного движения объекта, что приводит к расширению функциональных возможностей предложенного устройства.
На фиг. 1 представлена структурная схема системы пассивной локации движущегося объекта, на которой первый выход пеленгатора 1 соединен с входом синхронизатора 2, второй выход пеленгатора 1 соединен с входом блока формирования коэффициентов 3, выход которого соединен с первым входом буферного запоминающего устройства 4, выход которого соединен с первым входом блока 5 решения систем линейных алгебраических уравнений, выход которого соединен с первым входом блока медианного оценивания 6, выход которого соединен с первым входом блока 7 вычисления направляющих косинусов вектора скорости криволинейного движения объекта, выход которого является выходом устройства, первый, третий выходы синхронизатора 2 соединены соответственно с вторыми входами буферного запоминающего устройства 4 и блока 5 решения систем линейных алгебраических уравнений, второй выход синхронизатора 2 соединен с вторым входом блока медианного оценивания 6 и с третьим входом блока 7 вычисления направляющих косинусов вектора скорости криволинейного движения объекта, выход буферного запоминающего устройства 4 соединен с вторым входом блока 7 вычисления направляющих косинусов вектора скорости криволинейного движения объекта.
На фиг. 2 представлена схема возможной реализации блока формирования коэффициентов 3, на которой первая шина 11 входа соединена с входами первого 81. (k 1)-го 8k-1 преобразователей кодов и одновременно образует выход 11 блока 3, вторая шина 12 входа соединена с входами k-го 8k и (k + 1)-го 8k+1 преобразователей кодов, третья шина 13входа соединена с входом (k + 2)-го 8k+2 преобразователя кодов, первая шина 13 входа соединена с первым входом первого 91 перемножителя, выходы первого 81.(k 1)-го 8k-1 преобразователей кодов соединены соответственно с первыми входами второго 92.k-го 9k перемножитей и одновременно образуют выходы 12.1k блока 3, выход k-го 8kпреобразователя кодов соединен с вторыми входами первого 91.k-го 9k перемножителей и одновременно образует выход 12k+1 блока 3, первая шина 11 входа соединена с первым входом (k + 1)-го 9k+1 перемножителя, выходы первого 81. (k 1)-го 8k-1преобразователей кодов соединены соответственно с первыми входами (k + 2)-го 9k+2.(2k)-го 92k перемножителей, выходы (k + 1)-го 8k+1 и (k + 2)-го 8k+2 преобразователей кодов соединены соответственно с первым и вторым входами (2k + 1)-го 92k+1 перемножителя, выход которого соединен с вторыми входами (k + 1)-го 9k+1.(2k)-го 92k перемножителей и одновременно образует выход 13K+2 блока 3, выходы первого 91.k-го 9kперемножителей образуют соответственно 1k+1-й. 12k-й выходы блока 3, выходы (k + 1)-го 9k+1. (2k)-го 92k перемножителей образуют соответственно 12k+2-й.13k+1-й выходы блока 3.
На фиг. 3 приведена возможная реализация буферного запоминающего устройства 4. При этом первая 11.(4k + 2)-я 14k+2 шины первого входа буферного запоминающего устройства являются первыми входами соответственно первого 41. (4k + 2)-го 44k+2 сверхоперативных запоминающих устройств (СОЗУ). Шина 21 второго входа соединена с вторыми входами первого 41.(4k + 2)-го 44k+2 СОЗУ. Вход 22 соединен с третьими входами первого 41.(4k + 2)-го 44k+2 СОЗУ. Выходы СОЗУ 41.44k+2соединены соответственно с первыми входами регистров (41,1. 41,2k+1). (44k+2,1.44k+2,2k+1). Третья шина 23 второго входа соединена с вторыми входами регистров 41,1.44k+2,2k+1, выходы которых образуют выходы 11,1.18,2k+1 блока 4.
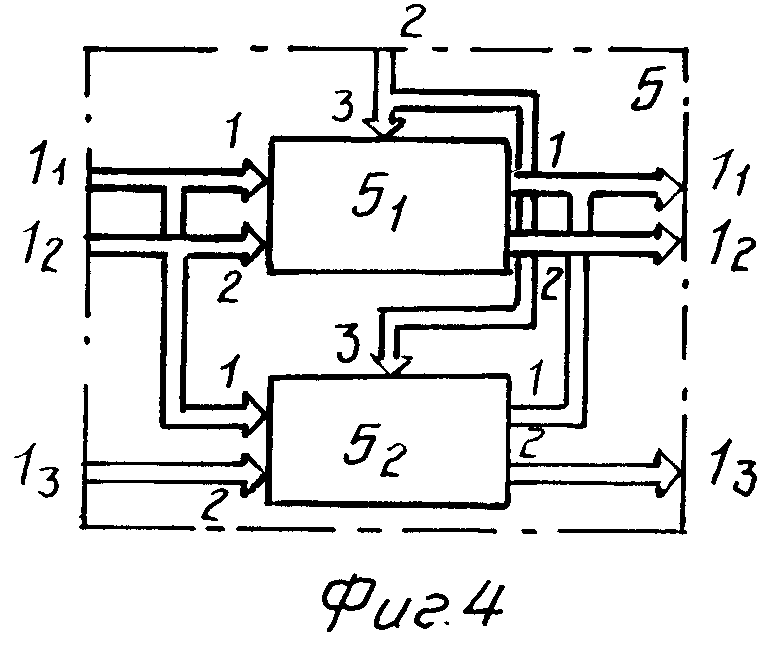
На фиг. 4 представлена схема возможной реализации блока решения систем линейных алгебраических уравнений 5, который состоит из двух устройств для решения систем линейных алгебраических уравнений (УРСЛАУ). Первая шина 11 первого входа соединена с первыми входами первого 51 и второго 52 УРСЛАУ. Вторая 12 и третья 13 шины первого входа соединены соответственно с вторыми входами первого 51 и второго 52 УРСЛАУ. Шина второго входа соединена с третьими входами первого 51 и второго 52УРСЛАУ. Первые выходы первого 51 и второго 52 УРСЛАУ образуют первую 11шину выхода блока 5. Вторые выходы первого 51 и второго 52 УРСЛАУ образуют соответственно вторую 12 и третью 13 шины выхода блока 5.
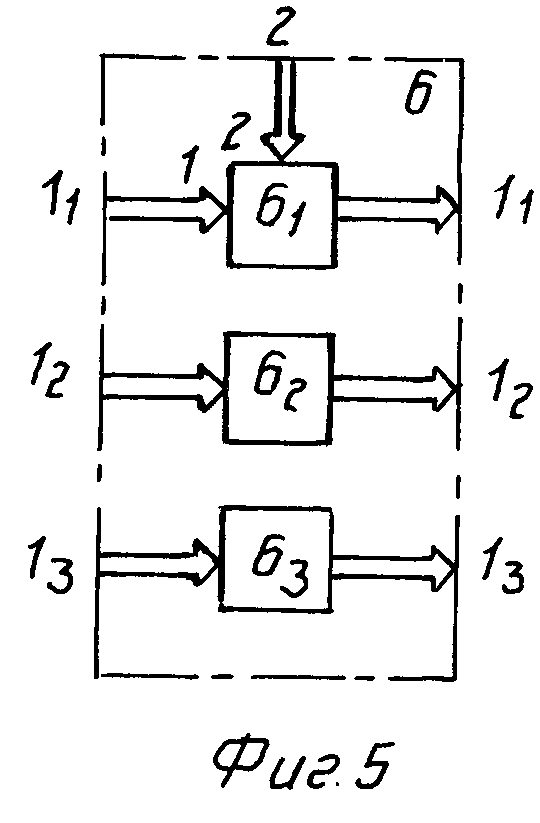
На фиг. 5 представлена схема возможной реализации блока медианного оценивания 6, который состоит из трех узлов медианного оценивания 61.63. Первая 11 шина первого входа и шина второго входа соединены соответственно с первым и вторым входами первого 61 узла медианного оценивания, выход которого образует выход 11 блока 6. Вторая 12 и третья 13 шины входа соединены соответственно с входами второго 62 и третьего 63 узлов медианного оценивания, выходы которых образуют соответственно 12-й и 13-й выходы блока 6.
На фиг. 6 приведена схема возможной реализации первого 61 узла медианного оценивания, который состоит из k каналов медианного оценивания, при этом шины 11.1k входа узла 61 соответственно соединены с первыми входами первого 61,1.k-го 61,k каналов медианного оценивания, выходы которых образуют соответственно выходы 11.1k узла медианного оценивания 61. Шина второго выхода блока 61 соединена с вторыми входами каналов 61,1.61k медианного оценивания.
На фиг. 7 приведена схема возможной реализации канала медианного оценивания 61,i, i= . Первая 11 и вторая 12 шины первого входа соединены соответственно с первым и вторым входами мультиплексора 10, выход которого соединен с медианным фильтром 11, выход которого является выходом канала медианного оценивания 61,i, i 1,k. Шина второго входа cоединена с третьим входом мультиплексора 10.
. Первая 11 и вторая 12 шины первого входа соединены соответственно с первым и вторым входами мультиплексора 10, выход которого соединен с медианным фильтром 11, выход которого является выходом канала медианного оценивания 61,i, i 1,k. Шина второго входа cоединена с третьим входом мультиплексора 10.
На фиг. 8 представлена схема возможной реализации узла медианного оценивания 6i, i 2,3. Первая 11.(k + 1)-я 1k+1 шины входа соединены соответственно с входами первого 6i,1.(k + 1)-го 6i,k+1медианных фильтров, выходы которых образуют соответственно выходы 11.1k+1 узла медианного оценивания 6i, i 2,3.
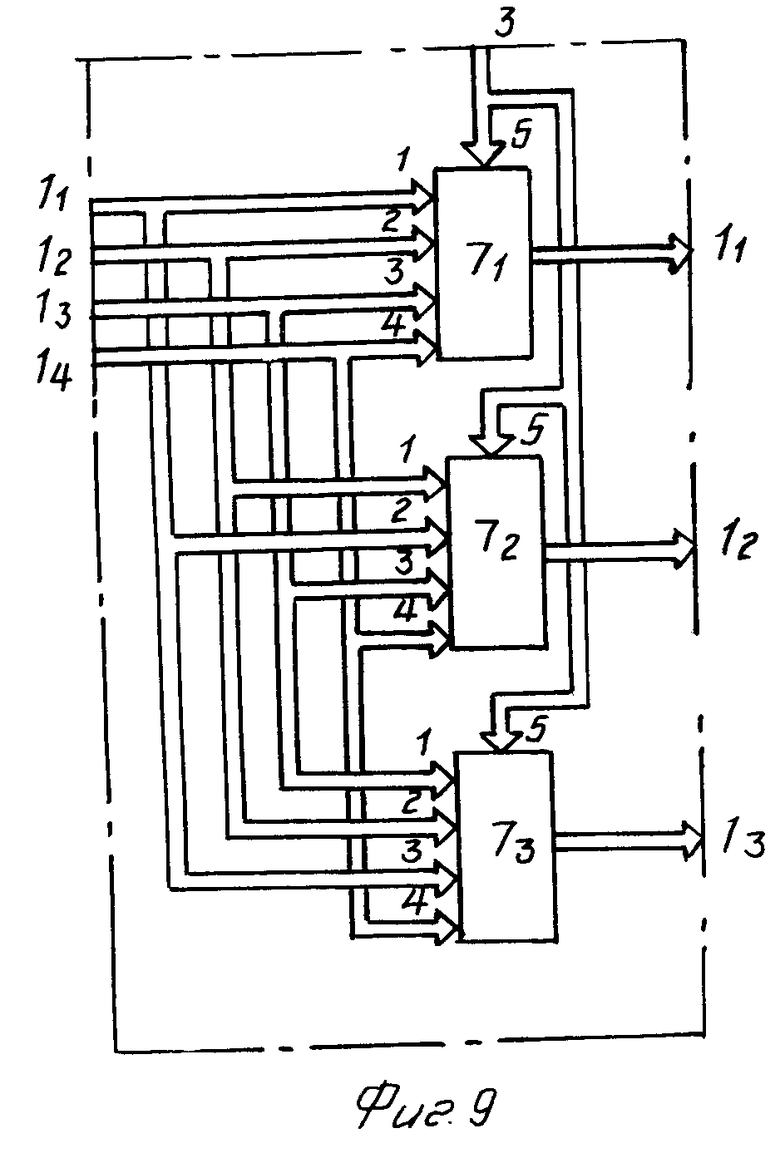
На фиг. 9 приведена схема возможной реализации блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта (БВНК КДО) 7. При этом шина 11 первого входа соединена с первым входом первого 71 устройства вычисления, вторым входом второго 72 устройства вычисления, третьим входом третьего 73 устройства вычисления, шина 12первого входа соединена с вторыми входами первого 71 и третьего 73устройств вычисления, а также с первым входом второго 72 устройства вычисления, шина 13 первого входа соединена с третьими входами первого 71 и второго 72 устройств вычисления, а также с первым входом третьего 73 устройства вычисления, шины второго и третьего входов соединены соответственно с четвертыми и пятыми входами первого 71. третьего 73устройств вычисления, выходы которых образуют соответственно выходы 11.13 БВНК КДО 7.
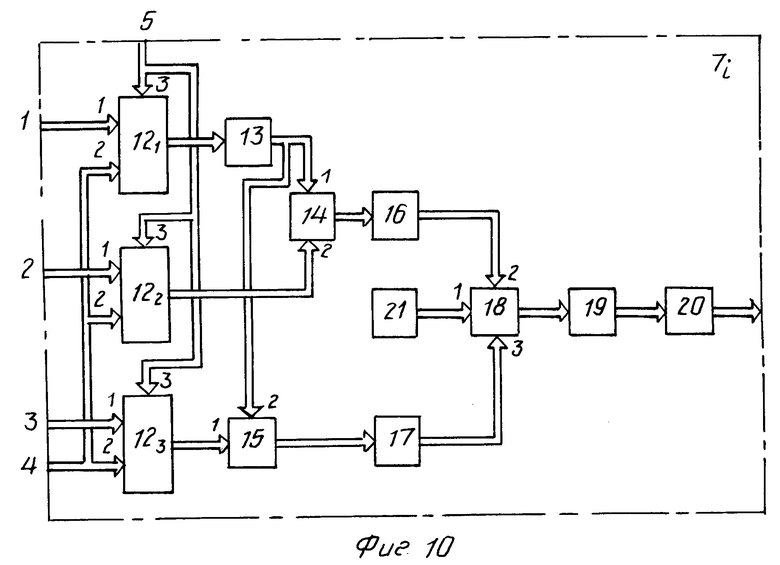
На фиг. 10 приведена схема возможной реализации устройства вычисления 7i, i= , на которой шины первого, второго, третьего входов соединены соответственно с первыми входами первого 121, второго 122, третьего 123 вычислителей, шина четвертого входа соединена с вторыми входами первого 121, второго 122, третьего 123 вычислителей, шина пятого входа соединена с третьими входами первого 121, второго 122, третьего 123 вычислителей. Выход первого 121 вычислителя соединен с входом первого преобразователя кодов 13, выход которого соединен с первым входом первого перемножителя 14 и с вторым входом второго перемножителя 15, выходы которых через второй 16 и третий 17 преобразователи кодов соединены соответственно с вторым и третьим входами сумматора 18, выход которого через четвертый 19 и пятый 20 преобразователи кодов соединен с выходом устройства вычисления 7i, i=
, на которой шины первого, второго, третьего входов соединены соответственно с первыми входами первого 121, второго 122, третьего 123 вычислителей, шина четвертого входа соединена с вторыми входами первого 121, второго 122, третьего 123 вычислителей, шина пятого входа соединена с третьими входами первого 121, второго 122, третьего 123 вычислителей. Выход первого 121 вычислителя соединен с входом первого преобразователя кодов 13, выход которого соединен с первым входом первого перемножителя 14 и с вторым входом второго перемножителя 15, выходы которых через второй 16 и третий 17 преобразователи кодов соединены соответственно с вторым и третьим входами сумматора 18, выход которого через четвертый 19 и пятый 20 преобразователи кодов соединен с выходом устройства вычисления 7i, i= . Выход постоянного запоминающего устройства (ПЗУ) 21 соединен с первым входом сумматора 18. Выходы второго 122 и третьего 123 вычислителей соединены соответственно с вторым входом первого перемножителя 14 и с первым входом второго перемножителя 15.
. Выход постоянного запоминающего устройства (ПЗУ) 21 соединен с первым входом сумматора 18. Выходы второго 122 и третьего 123 вычислителей соединены соответственно с вторым входом первого перемножителя 14 и с первым входом второго перемножителя 15.
На фиг. 11 приведена схема возможной реализации вычислителя 12i, i= . Первая 11. k-я 1k шины первого входа соединены соответственно с первыми входами первого 221.k-го 22k перемножителей. Первая 21.k-я 2kшины второго входа соединены соответственно с вторыми входами первого 221.k-го 22k перемножителей, выходы которых соединены соответственно с первыми входами (k + 1)-го 22k+1.(2k)-го 222k перемножителей, выходы которых соединены соответственно с первым.k-м входами сумматора 23, выход которого образует выход вычислителя 12i, i=
. Первая 11. k-я 1k шины первого входа соединены соответственно с первыми входами первого 221.k-го 22k перемножителей. Первая 21.k-я 2kшины второго входа соединены соответственно с вторыми входами первого 221.k-го 22k перемножителей, выходы которых соединены соответственно с первыми входами (k + 1)-го 22k+1.(2k)-го 222k перемножителей, выходы которых соединены соответственно с первым.k-м входами сумматора 23, выход которого образует выход вычислителя 12i, i= . Шина третьего входа через первый 241.k-й 24k преобразователи соединена с вторыми входами (k + 1)-го 22k+1.(2k)-го 222k перемножителей.
. Шина третьего входа через первый 241.k-й 24k преобразователи соединена с вторыми входами (k + 1)-го 22k+1.(2k)-го 222k перемножителей.
На фиг. 12 приведена схема возможной реализации преобразователя 24i, i=  .
.
Шина 11 входа соединена со вторым входом сумматора 25 и через первый 26 преобразователь кодов с первым входом перемножителя 27, выход которого образует выход преобразователя 24i, i= . Шина 12 входа соединена с первым входом сумматора 25, выход которого через второй 28 и третий 29 преобразователи кодов соединен с вторым входом перемножителя 27.
. Шина 12 входа соединена с первым входом сумматора 25, выход которого через второй 28 и третий 29 преобразователи кодов соединен с вторым входом перемножителя 27.
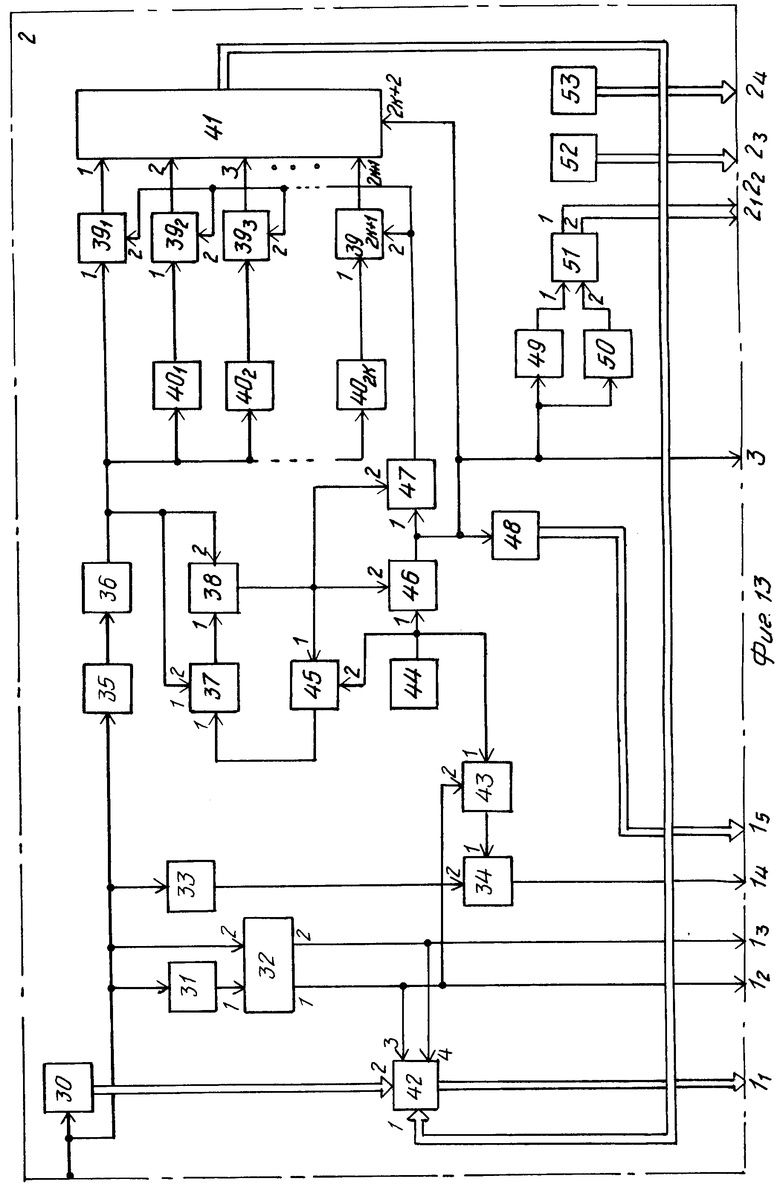
На фиг. 13 приведена схема возможной реализации синхронизатора 2. Вход синхронизатора 2 соединен со счетным входом первого счетчика 30, а также через первый элемент задержки 31 с первым входом первого триггера 32, с вторым входом первого триггера 32, через второй элемент задержки 33 с вторым входом элемента ИЛИ 34, с счетным входом второго счетчика 35, выход которого соединен с счетным входом третьего счетчика 36, выход которого соединен с вторыми входами регистра 37, компаратора 38, с первым входом первого 391 сумматора, а также через первый 401.(2k)- 402k умножители частоты с первыми входами второго 392. (2k + 1)-го 392k+1 cумма-торов. Выходы первого 391. (2k+1)-го 392K+1сумматоров соединены соответственно с первым.(2k + 1)-м входами первого мультиплексора 41, выход которого соединен с первым входом второго мультиплексора 42. Первый выход первого триггера 32 соединен с третьим входом второго мультиплексора 42 и с вторым входом первого элемента И 43, выход которого соединен с первым входом элемента ИЛИ 34.
Выход генератора тактовых импульсов 44 соединен с вторым входом второго элемента И 45, с первым входом первого элемента И 43, с первым входом четвертого счетчика 46, выход которого соединен с первым входом пятого счетчика 47, с входом дешифратора 48, через третий 49 и четвертый 50 элементы задержки с первым и вторым входами второго триггера 51, а также с (2k + 2)-м входом первого мультиплексора 41. Выход первого счетчика соединен с вторым входом второго мультиплексора 42, второй выход первого триггера 32 соединен с четвертым входом второго мультиплексора 42. Выход второго элемента И 45 соединен с первым входом регистра 37, выход которого соединен с первым входом компаратора 38, выход которого соединен с первым входом второго элемента И 45, вторым входом четвертого счетчика 46, вторым входом пятого счетчика 47, выход которого соединен с вторыми входами первого 391.(2k + 1)-го 392k+2 сумматоров. Выход второго мультиплексора 42, первый и второй выходы первого триггера 32, выход элемента ИЛИ 34, выход дешифратора 48 образуют соответственно выходы 11.15 первого выхода синхронизатора 2. Первый и второй выходы второго триггера 51, выходы первого 52 и второго 53 постоянных запоминающих устройств образуют соответственно выходы 21.24 второго выхода синхронизатора 2. Выход четвертого счетчика 46 образует третий выход синхронизатора 2.
Система пассивной локации движущегося объекта (см. фиг. 1) работает следующим образом.
Полученные на пеленгаторе 1 сглаженные значения пеленгов поступают на вход блока формирования коэффициентов 2 (см. фиг. 2). Коды сформированных коэффициентов по сигналам управления с первого выхода синхронизатора 2 записываются в буферное запоминающее устройство (БЗУ) 4 (см. фиг, 3). В промежутках между тактами записи БЗУ 4 находится в режиме считывания и по тактам считывания информация из СОЗУ 41. 44k+2записывается в регистры 41,1. 44k+2,2k+1 (см. фиг. 3). Порядком записи информации из СОЗУ 41.44k+2 в регистры 41,1.44k+2,2k+1 управляет дешифратор 48 синхронизатора 2 (см. фиг. 13). При этом в регистры 41,1.4k,2k+1 и 43k+3,1.44k+2,2k+1 записываются коды времени t1i.t2k+1i, i= с выходов 11.1k блока формирования коэффициентов 3, в регистры 4k+1,1.42k+1,2k+1 коды t1itgα1.t2k+1itg α2k+1, i=
с выходов 11.1k блока формирования коэффициентов 3, в регистры 4k+1,1.42k+1,2k+1 коды t1itgα1.t2k+1itg α2k+1, i= с выходов 1k+1. 12k+1 блока 3, в регистры 42k+2,1.43k+2,2k+1 коды t1isec α1 1tg β1 t2k+1isecα2k+1tgβ2k+1 i=
с выходов 1k+1. 12k+1 блока 3, в регистры 42k+2,1.43k+2,2k+1 коды t1isec α1 1tg β1 t2k+1isecα2k+1tgβ2k+1 i= с выходов 12k+2.13k+2 блока 3.
с выходов 12k+2.13k+2 блока 3.
По окончании записи кодов в регистры 41,1.44k+2,2k+1 последние по управляющему сигналу, поступающему от синхронизатора 2, записываются в блок решения систем линейных алгебраических уравнений (БРСЛАУ) 5 (см. фиг. 4), который состоит из двух устройств для решения систем линейных алгебраических уравнений (УРСЛАУ) 51 и 52. Коды чисел "1", "0" и "-1" (системы (4), (5)) полагаются "защитными" в соответствующие регистры УРСЛАУ 51 и 52 при изготовлении устройства. По сигналу "Пуск", который поступает с третьего выхода синхронизатора 2 на вход блоков управления УРСЛАУ 51 и 52, последние отрабатывают заложенный в них порядок действия и по окончании счета коды вычисленных коэффициентов поступают на вход 1 блока медианного оценивания 6 (см. фиг. 5), который осуществляет статистическое оценивание рассчитываемых коэффициентов, так как в реальных условиях процесс пеленгования неизбежно сопровождается флуктуационными погрешностями. Оценки искомых коэффициентов с выхода блока медианного оценивания 6 поступают на первый вход блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта (БВНК КДО) 7 (см. фиг. 9). На второй вход блока 7 поступают коды, пропорциональные моментам времени t1i.t2k+1i с выхода БЗУ 4. Структура блока 7 аппаратно реализует выражения системы (6). Следовательно, на его выходе имеют место коды, пропорциональные направляющим косинусам вектора скорости объекта, движущегося по криволинейной траектории.
Рассмотрим работу блока формирования коэффициентов 3 (фиг. 2). Для определенности положим в выражениях (2).(6) j 0, т.е. аj a0. Это объясняется тем, что выбором начала системы координат можно всегда получить значения а0 ≠0. На вход 11 блока формирования коэффициентов 3 поступает код, пропорциональный текущему времени t, на вход 12 поступает код, пропорциональный азимуту α цели, на вход 13 поступает код, пропорциональный углу места β цели. На выходах преобразователей кодов 81.8k-1 имеют место коды, пропорциональные t2.tk, на выходе преобразователя кодов 8k код, пропорциональный tgα на выходе преобразователя кодов 8k+1 код, пропорциональный secα на выходе преобразователя кодов 8k+2 код, пропорциональный tg β. На выходе перемножителя 92k+1 имеет место код, пропорциональный tg β secα перемножителей 91.9k код, пропорциональный ttg α, перемножителей 9k+1.9k код, пропорциональный ttg β sec α. Таким образом в момент времени t2k+1 на выходах 11.13k+2 блока 3 заканчивается формирование коэффициентов систем линейных алгебраических уравнений (4) и (5).
Рассмотрим работу блока медианного оценивания 6 (см. фиг. 5). Поскольку на выходе 11 БРСЛАУ 5 имеет место статистическая избыточность за счет двукратного определения коэффициентов ai/a0, i= , блок медианного оценивания содержит первый узел 61 (см. фиг. 6) медианного оценивания, который состоит из k каналов медианного оценивания (см. фиг. 7). Коды вычисленных коэффициентов ai/a0 с выхода 11 БРАСЛАУ 5 поступают на входы 11, 12 каждого из каналов медианного оценивания. Под воздействием управляющих сигналов с второго выхода синхронизатора 2 мультиплексор 10 последовательно подключает к входу медианного фильтра 11 значение коэффициентов аi/a0 с первых выходов УРСЛАУ 51 и 52. Второй 62 и третий 63 узлы медианного оценивания (см. фиг. 8) осуществляют статистическое оценивание коэффициентов bi/a0 и сi/a0 соответственно. Коэффициенты bi/a0 поступают с выхода 12БРСЛАУ 5, коэффициенты сi/a0 с выхода 13 БРАСЛАУ 5. Узлы медианного оценивания 62 и 63 (см. фиг. 8) состоят из k + 1 медианных фильтров. Медианные фильтры выбраны потому, что они позволяют получать устойчивые к аномальным погрешностям измерений значения оценок искомых коэффициентов и не требуют априорного знания модели шумов в каналах наблюдения.
, блок медианного оценивания содержит первый узел 61 (см. фиг. 6) медианного оценивания, который состоит из k каналов медианного оценивания (см. фиг. 7). Коды вычисленных коэффициентов ai/a0 с выхода 11 БРАСЛАУ 5 поступают на входы 11, 12 каждого из каналов медианного оценивания. Под воздействием управляющих сигналов с второго выхода синхронизатора 2 мультиплексор 10 последовательно подключает к входу медианного фильтра 11 значение коэффициентов аi/a0 с первых выходов УРСЛАУ 51 и 52. Второй 62 и третий 63 узлы медианного оценивания (см. фиг. 8) осуществляют статистическое оценивание коэффициентов bi/a0 и сi/a0 соответственно. Коэффициенты bi/a0 поступают с выхода 12БРСЛАУ 5, коэффициенты сi/a0 с выхода 13 БРАСЛАУ 5. Узлы медианного оценивания 62 и 63 (см. фиг. 8) состоят из k + 1 медианных фильтров. Медианные фильтры выбраны потому, что они позволяют получать устойчивые к аномальным погрешностям измерений значения оценок искомых коэффициентов и не требуют априорного знания модели шумов в каналах наблюдения.
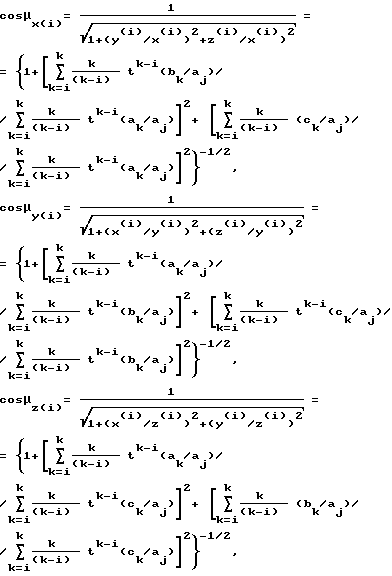
Рассмотрим работу блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта (БВНК КДО) 7 (см. фиг. 9), который состоит из трех устройств вычисления 71.73 (см. фиг. 10). Первое устройство вычисления 71 аппаратно реализует выражение
cosμx(i)=  , второе 72 и третье 73 устройства аналогичные выражения системы (6). На первые входы вычислителей 121.123 поступают соответственно коды, пропорциональные коэффициентам аi/a0, bi/a0, ci/a0, на вторые входы вычислителей 121.123 поступают коды, пропорциональные ti. На выходе преобразователя кодов 13, выполняющего преобразование y 1/x, имеет место код, пропорциональный 1/(xi/а0), на выходе перемножителей 14 и 15 коды, пропорциональные y(i)/x(i) и z(i)/x(i) соответственно, на выходе преобразователей кодов 16 и 17 коды, пропорциональные (y(i)/x(i))2 и (z(i)/x(i))2 соответственно, на выходе сумматора 18 код, пропорциональный l1 +(y(i)/x(i))2 + (z(i)/(x(i))2} на выходе преобразователя кодов 19 код пропорциональный
, второе 72 и третье 73 устройства аналогичные выражения системы (6). На первые входы вычислителей 121.123 поступают соответственно коды, пропорциональные коэффициентам аi/a0, bi/a0, ci/a0, на вторые входы вычислителей 121.123 поступают коды, пропорциональные ti. На выходе преобразователя кодов 13, выполняющего преобразование y 1/x, имеет место код, пропорциональный 1/(xi/а0), на выходе перемножителей 14 и 15 коды, пропорциональные y(i)/x(i) и z(i)/x(i) соответственно, на выходе преобразователей кодов 16 и 17 коды, пропорциональные (y(i)/x(i))2 и (z(i)/x(i))2 соответственно, на выходе сумматора 18 код, пропорциональный l1 +(y(i)/x(i))2 + (z(i)/(x(i))2} на выходе преобразователя кодов 19 код пропорциональный  , на выходе преобразователя кодов 20 код пропорциональный 1
, на выходе преобразователя кодов 20 код пропорциональный 1 . Первый вычислитель 121 устройства вычисления 7i аппаратно реализует выражение
. Первый вычислитель 121 устройства вычисления 7i аппаратно реализует выражение
x(i)/ao=  tk-i(ak/ao), второй 122 и третий 123 вычислители аналогичные выражения для y(i)/a0и z(i)/a0 системы (6) (см. фиг. 11). В перемножителях 221.22kосуществляется перемножение кодов соответствующих коэффициентов с входом 11.1k и кодов времени, поступающих с входов 21.2k вычислителя 12i. На выходе перемножителей 222k+1.222k имеют место коды, пропорциональные k!/(k i)!tk-i(ak/a0), которые суммируются в сумматоре 23. Формирование кодов k!/(k i)! осуществляют преобразователи 24i, i=
tk-i(ak/ao), второй 122 и третий 123 вычислители аналогичные выражения для y(i)/a0и z(i)/a0 системы (6) (см. фиг. 11). В перемножителях 221.22kосуществляется перемножение кодов соответствующих коэффициентов с входом 11.1k и кодов времени, поступающих с входов 21.2k вычислителя 12i. На выходе перемножителей 222k+1.222k имеют место коды, пропорциональные k!/(k i)!tk-i(ak/a0), которые суммируются в сумматоре 23. Формирование кодов k!/(k i)! осуществляют преобразователи 24i, i= (см. фиг. 12). От синхронизатора 2 на входы 11 и 12 каждого из k преобразователей поступают значения k и i соответственно. Сумматор 25 формирует на своем выходе код, пропорциональный (k i), на выходах преобразователей кодов 26 и 28 имеют место коды, пропорциональные k! и (k i)! соответственно, на выходе преобразователя кодов 29 код, пропорциональный 1/(k i)! на выходе перемножителя 27 код пропорциональный k!(k i)!
(см. фиг. 12). От синхронизатора 2 на входы 11 и 12 каждого из k преобразователей поступают значения k и i соответственно. Сумматор 25 формирует на своем выходе код, пропорциональный (k i), на выходах преобразователей кодов 26 и 28 имеют место коды, пропорциональные k! и (k i)! соответственно, на выходе преобразователя кодов 29 код, пропорциональный 1/(k i)! на выходе перемножителя 27 код пропорциональный k!(k i)!
Рассмотрим работу синхронизатора 2 (см. фиг. 13). Импульсы с первого выхода пеленгатора поступают на счетный вход счетчика 30, который формирует код адреса, поступающий на второй вход мультиплексора 42.
Импульсы с первого выхода пеленгатора 1 поступают на второй вход триггера 32, сигнал с выхода 2 которого устанавливает СОЗУ 41.44k+2 в режим записи. На первый вход триггера 32 поступают импульсы с первого выхода пеленгатора 1 через элемент задержки 31, формируя на выходе 1 триггера 32 сигналы считывания информации из СОЗУ 41.44k+2. Импульсы с выхода схемы ИЛИ 34 тактируют СОЗУ 41.44k+2. После подсчета (2k + 1) импульсов, поступающих от пеленгатора 1, на выходе счетчика 35 появляется импульс переполнения, который через счетчик 36 поступает на умножители частоты 401.402k, при этом умножитель 401 является умножителем на две, умножитель 402 на три.умножитель 402k на (2k + 1). После подсчета (2k + 1) импульсов от генератора тактовых импульсов 44 импульс переполнения с выхода счетчика 46 поступает через счетчик 47 на вторые входы сумматоров 391.392k+1, увеличивая их содержимое на единицу. В зависимости от состояния выхода счетчика 46 к выходной шине мультиплексора 41 коммутируется один из (2k + 1) входов. В результате на выходе мультиплексора 41 последовательно формируются коды адресов максимально разнесенных во времени замеров, что обеспечивает достижение наилучших точностных характеристик определения направляющих косинусов вектора скорости криволинейного движения объекта. Импульсы с выходов триггера 32 управляют работой мультиплексора 42, при этом импульс записи с выхода 2 триггера 32 подключает к выходу мультиплексора 42 сигнал с выхода счетчика 30. Дешифратор 48 управляет порядком считывания информации из регистров 41,1.44k+2,2k+1. Импульс с выхода счетчика 46 поступает на третий выход синхронизатора 2 и запускает БРСЛАУ 5, а также через элементы задержки 49 и 50 поступает на первый и второй входы триггера 51. Причем для элемента задержки 49 τзад*= tБРАСЛАУ5, где tБРАСЛАУ5 время расчета коэффициентов в блоке 5, для элемента задержки 50 τзад> τзад*. Таким образом, на первом и втором выходах триггера 51 формируются управляющие сигналы 22 и 21соответственно для управления мультиплексором 10 канала медианного оценивания 61,i. На выходах ПЗУ 52 и 53 сформированы коды, пропорциональные значениям k и i соответственно, которые поступают на вход преобразователя 24i.
Все блоки и элементы предложенного устройства пассивной локации движущегося объекта могут быть легко реализованы на базе типовых узлов вычислительной техники: счетчики на базе К155ИЕ5, регистры на базе К155ИР1; сумматоры на базе К155ИМ3, схема ИЛИ на базе К155ЛЕ1, триггеры на базе К155ТМ9 и т.д.
Таким образом, расширены функциональные возможности устройства за счет одновременного определения направляющих косинусов вектора скорости криволинейного движения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2050590C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1993 |
|
RU2092942C1 |
| УСТРОЙСТВО УПЛОТНЕНИЯ КАНАЛА СВЯЗИ | 1990 |
|
RU2024207C1 |
| УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ КОНТУРОВ ДВУМЕРНЫХ ОБЪЕКТОВ | 1996 |
|
RU2104580C1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1995 |
|
RU2100905C1 |
| ОПТИЧЕСКИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1996 |
|
RU2119182C1 |
| Устройство отождествления наборов данных | 1989 |
|
SU1654810A1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2084014C1 |
| УСТРОЙСТВО ДЛЯ СИНТЕЗА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ | 1994 |
|
RU2110086C1 |







Сущность изобретения: система пассивной локации движущегося объекта содержит пеленгатор 1 синхронизатор 2, блок формирования коэффициентов 3, буферное запоминающее устройство 4, блок решения систем линейных алгебраических уравнений 5, блок медианного оценивания 6, блок вычисления направляющих косинусов вектора скорости криволинейного движения объекта 7. 1-3-4-5-6-7: 1-2-4-7: 2-5: 2-6: 2-7. 13 ил.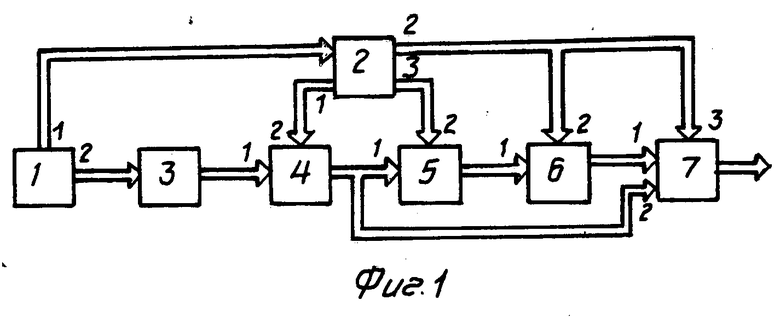
СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА, содержащая пеленгатор и синхронизатор, отличающаяся тем, что, с целью одновременного определения направления криволинейного движения объекта, введены блок формирования коэффициентов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок медианного оценивания, блок вычисления направляющих косинусов вектора скорости криволинейного движения объекта, при этом первый выход пеленгатора соединен с входом синхронизатора, второй выход пеленгатора соединен с входом блока формирования коэффициентов, выход которого соединен с первым входом буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого соединен с первым входом блока медианного оценивания, выход которого соединен с первым входом блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта, выход которого является выходом системы пассивной локации, первый и третий выходы синхронизатора соединены соответственно с вторыми входами буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, второй выход синхронизатора соединен с вторым входом блока медианного оценивания и третьим входом блока вычисления направляющих косинусов вектора скорости криволинейного движения объекта, второй вход которого соединен с выходом буферного запоминающего устройства.
| Патент США N 4633257, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
