Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезии для определения местоположения объекта по угломерным данным.
Известные радиопеленгаторы не позволяют обеспечить определение местоположения цели по угломерным данным.
Наиболее близким к предлагаемому является устройство пассивной локации движущегося объекта, содержащее синхронизатор.
Однако, данное устройство не обеспечивает определение местоположения цели по угломерным данным.
Задача определения местоположения объекта по угломерным данным является весьма актуальной. Существующие угломерные системы пассивной локации реализуют, как правило, триангуляционный способ определения местоположения. В связи с этим возникает необходимость использования совокупности пеленгаторов, необходимость организации центра совместной статистической обработки измерений. В связи с этим представляет интерес разработка устройств пассивной локации, основанных на принципиально новых методах локации на основе однопунктных высокоточных угломерных систем.
Задача изобретения - обеспечение определения местоположения объекта по угломерным данным.
Решение поставленной задачи достигается тем, что в пеленгаторе, содержащем синхронизатор для обеспечения определения местоположения объекта введены блок формирования пеленгов, блок вычисления коэффициентов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок медианных фильтров, блок определения местоположения, блок инерциальной системы навигации, блок отображения, при этом первый выход блока формирования пеленгов соединен с первым входом блока вычисления коэффициентов, выход которого соединен с первым входом буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого через блок медианных фильтров соединен с первым входом блока определения местоположения, выход которого через блок отображения соединен с выходом устройства, выход блока инерциальной системы навигации соединен с вторым входом блока вычисления коэффициентов, первый и второй выходы синхронизатора соединены соответственно со вторыми входами буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, первый выход устройства формирования пеленгов соединен со вторым входом блока определения местоположения, второй выход блок формирования пеленгов соединен со входом синхронизатора, при этом первая шина первого входа блока вычисления коэффициентов соединена со входом первого преобразователя кодов, вторая шина первого входа соединена с входами второго и третьего преобразователей кодов, выходы первого и второго преобразователей кодов соединены с первым и вторым входами первого перемножителя соответственно, первая шина второго входа соединена с первыми входами второго и третьего перемножителей, вторая и третья шины второго входа соединены с первыми входами первого и второго сумматоров соответственно, третья шина первого входа блока соединена с первыми входами четвертого и пятого перемножителей, выход первого перемножителя соединен с вторыми входами третьего и четвертого перемножителей, выходы второго и третьего перемножителей соединены с вторыми входами первого и второго сумматоров соответственно, выход третьего преобразователя кодов соединен с вторыми входами второго и пятого перемножителей, выход блока вычисления коэффициентов образуют выходы первого, четвертого, пятого перемножителей, выход третьего преобразователя кодов, выходы первого и второго сумматоров, третья шина первого входа блока.
Новизна изобретения состоит во введении дополнительных блоков и межблочных соединений.
Работа пеленгатора, который полагается подвижным, основана на использовании априорных сведений о характере движения целей. В частности, в радиолокации весьма распространенной является модель равномерного прямолинейного движения цели, описываемая выражениями
 (1) где Xc, Yc, Zc - декартовые координаты цели;
(1) где Xc, Yc, Zc - декартовые координаты цели;
ao, a1, bo, b1, co, c1 - неизвестные коэффициенты модели.
С учетом связи декартовой системы координат с радиотехнической справедливы следующие соотношения:
Хс-Хр= R cos β cos α,
Yc-Yp= R cos β sin α,
Zc-Zp= Rsin β, где Xo, Yp, Zp - декартовы координаты подвижного пеленгатора;
R, α, β - соответственно наклонная дальность, азимут и угол места цели в радиотехнической системе координат, связанной с подвижным пеленгатором.
Используя известный подход записываем


 (2)
(2)
Переписывая (2) в виде
tgα ao + tgα a1t-bo-b1t= xptgα - yp,
tgβ secα ao+tgβ secα a1t-co-c1t=
= Xptgβ secα - Zр,
нетрудно заменить, что для нахождения неизвестных коэффициентов ао, а1, bo, b1, co, c1 необходимо решить систему уравнений: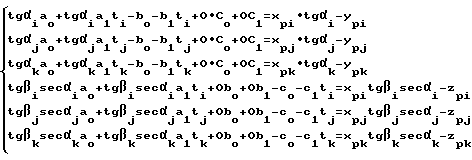 (3)
(3)
i≠j≠k.
Таким образом, по трем замерам пеленгов α, β и трем положениям подвижного пеленгатора Хр, Yp, Zp в три несовпадающих момента времени t1≠tj≠tk путем решения системы (3) удается определить искомые коэффициенты траектории цели и местоположение объекта в пространстве.
Решение этой системы для случая прямолинейного равномерного движения цели имеет следующий вид:
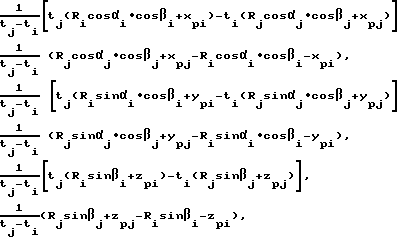 ,
,
где
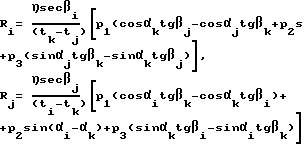 in(αk-αj)+ (4)
in(αk-αj)+ (4)
 (5)
(5)
η= [sin(αk-αj)tgβi+sin(αi-αk)tgβj+sin(αj-αi)tgβk] -1.
Несложный анализ с использованием формул (4), (5) показывает, что задача оценивая параметров модели (1) по угломерным данным подвижного пеленгатора наблюдаема, если закон движения последнего не является прямолинейным равномерным. Доказательство данного утверждения следует из следующих рассуждений. Пусть Xp(t)= dox+ d1xt, Yp(t)= dyo+ d1yt, Zp(t)= doz+d1zt. Подставляя данные выражения в (5) после несложных выкладок получаем р1= р2= р3= 0. В этом случае дальности Ri и Rj, соответствующие двум моментам времени ti и tj, обращаются в ноль. В этом случае исходная задача ненаблюдаема.
Если временной закон движения пеленгатора по прямой не является равномерным, то с использованием (4), (5), методом доказательства от противного, несложно убедиться в наблюдаемости задачи оценивания. Анализ показал, что по точностным характеристикам предложенный подход не уступает известным триангуляционным методам оценивания.
Таким образом, как следует из выражений (1) - (5), введение новых структурных элементов и связей позволяет в совокупности с общими признаками получить технический результат, состоящий в обеспечении возможности определения местоположения объекта только по угломерным данным, поступающим от подвижного пеленгатора.
Изобретение может найти широкое применение в системах пассивной локации объектов, при этом реализация подвижного пеленгатора позволяет существенно снизить аппаратурные затраты и повысить скрытность и выживаемость систем пассивной локации.
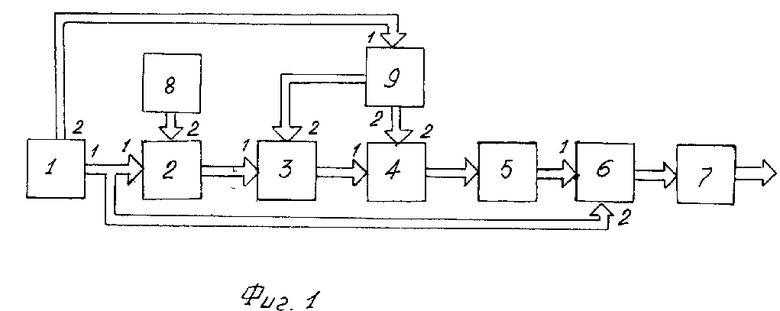
На фиг. 1 представлена структурная схема предлагаемого пеленгатора.
Он содержит блок 1 формирования пеленгов, блок 2 вычисления коэффициентов, буферное запоминающее устройство (БЗУ) 3, блок 4 решения систем линейных алгебраических уравнений, блок 5 медианных фильтров, блок 6 определения местоположения 6, блок 7 отображения, блок 8 инерциальной системы навигации и синхронизатор 9.
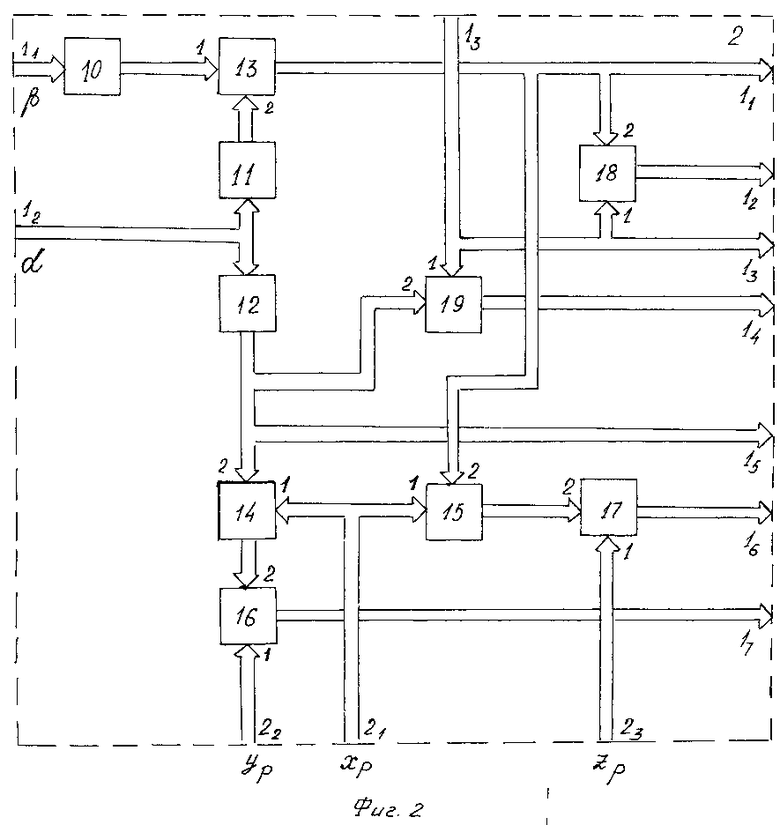
На фиг. 2 представлена функциональная схема блока 2 вычисления коэффициентов.
Он содержит первый 10, второй 11 и третий 12 преобразователи кодов, первый 13, второй 14, третий 15, четвертый 18 и пятый 19 перемножители, первый 16 и второй 17 сумматоры.
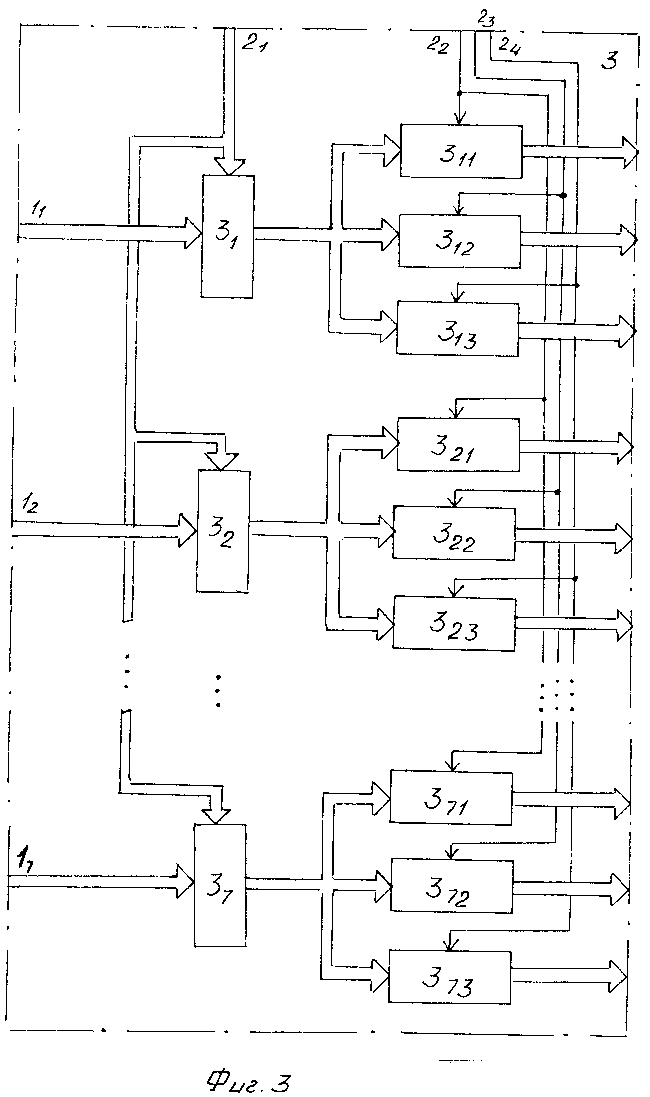
На фиг. 3 представлена схема возможной реализации буферного запоминающего устройства 3.
Он содержит семь сверхоперативных запоминающих устройств (СОЗУ) 31. . . . 37 и двадцати одного регистра 311, 312, 313. . . 371, 372, 373.
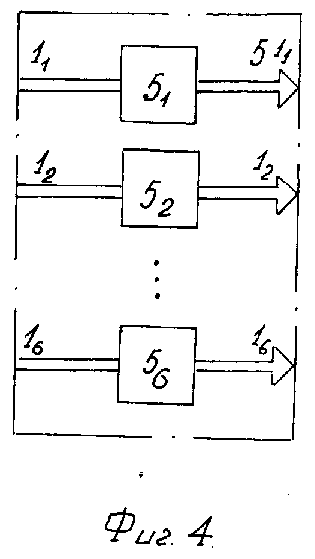
На фиг. 4 представлена схема возможной реализации блока 5 медианных фильтров 5.
Он содержит шесть медианных фильтров 51. . . 56.
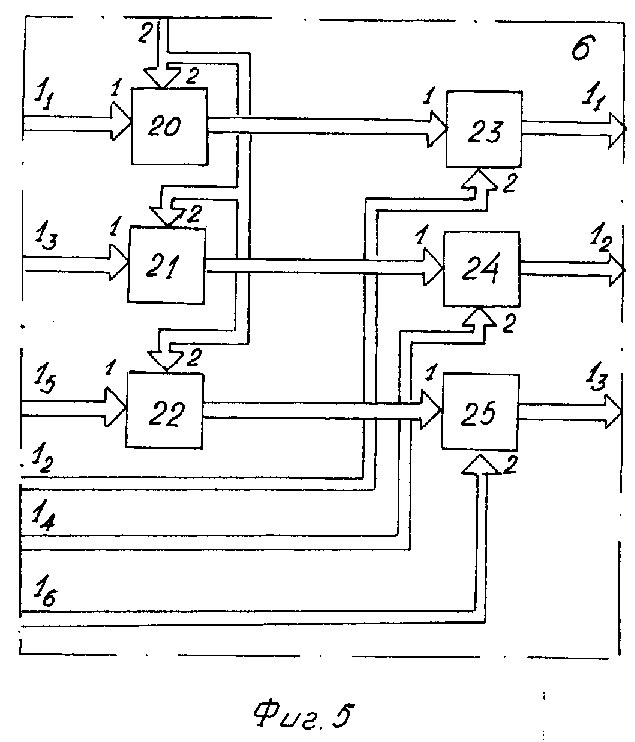
На фиг. 5 представлена схема возможной реализации блока 6 определения местоположения.
Он содержит первый 20, второй 21 и третий 22 перемножители, первый 23, второй 24 и третий 25 сумматоры.
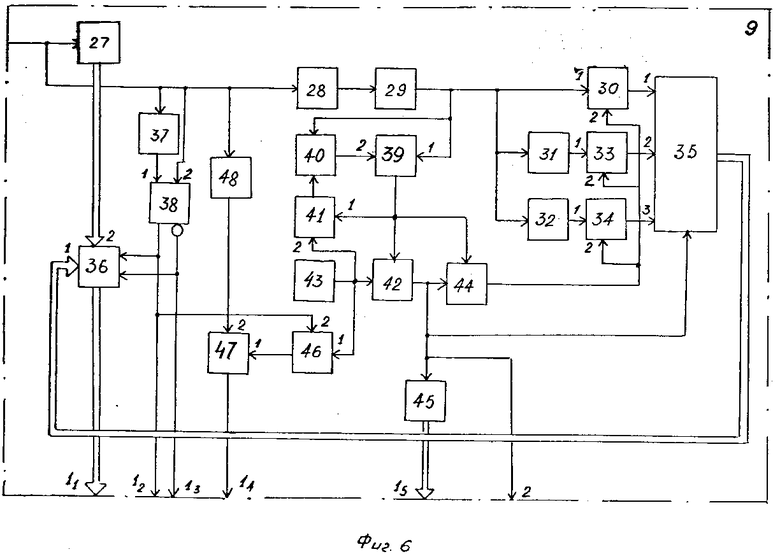
На фиг. 6 представлена схема возможной реализации синхронизатора 9.
Он содержит первый 27, второй 28, третий 29, четвертый 42 и пятый 44 счетчики, первый 30, второй 33 и третий 34 сумматоры, первый 31 и второй 32 преобразователи кодов, первый 35 и второй 36 мультиплексоры, первую 37 и вторую 48 схемы задержки, триггер 38, схему 39 сравнения, регистр 40, первую 41 и вторую 46 схемы И, генератор 43 тактовых импульсов (ГТИ), дешифратор 45, схему ИЛИ 47.
Первый выход блока 1 формирования пеленгов соединен с первым входом блока 2 вычисления коэффициентов, выход которого соединен с первым входом БЗУ 3, выход которого соединен с первым входом блока 4 решения систем линейных алгебраических уравнений (БРСЛАУ), выход которого через блок 5 медианных фильтров соединен с первым входом блока 6 определения местоположения, выход которого через блок 7 отображения соединен с выходом устройства, выход блока 8 инерциальной системы навигации соединен с вторым входом блока вычисления коэффициентов 2, первый и второй выходы синхронизатора 9 соединены соответственно с вторыми входами БЗУ 3 и БРСЛАУ 4, первый выход блока 1 соединен с вторым входом блока 6 определения местоположения, второй выход блока 1 формирования пеленгов соединен с входом синхронизатора 9.
На фиг. 2 первая шина 11 первого входа блока вычисления коэффициентов соединена с входом первого преобразователя 10 кодов, вторая шина 12 первого входа соединена с входами второго 11 и третьего 12 преобразователей кодов, выходы первого 10 и второго 11 преобразователей кодов соединены с первым и вторым входами первого умножителя 13 соответственно. Первая шина 21 второго входа соединена с первыми входами второго 14 и третьего 15 перемножителей, вторая 22 и третья 23 шины второго входа соединены с первыми входами первого 16 и второго 17 сумматоров соответственно. Третья шина 13 первого входа блока соединена с первыми входами четвертого 18 и пятого 19 перемножителей, выход первого перемножителя 13 соединен с вторыми входами третьего 15 и четвертого 18 перемножителей, выходы второго 14 и третьего 15 перемножителей соединены с вторыми входами первого 16 и второго 17 сумматоров соответственно, выход третьего преобразователя кодов 12 соединен с вторыми входами второго 14 и пятого 19 перемножителей, выход блока 2 вычисления коэффициентов образуют выходы первого 13, четвертого 18, пятого 19 перемножителей, выход третьего преобразователя 12 кодов, выходы первого 16 и второго 17 сумматоров, третья шина 13 первого входа блока 2.
На фиг. 3 первая 11. . . седьмая 17 шины первого входа БЗУ 3 являются информационными входами соответственно первого 31. . . седьмого 37 СОЗУ. Шина 21 БЗУ 3 соединена с управляющими входами первого 31. . . седьмого 37СОЗУ. Выходы СОЗУ 31. . . 37 соединены с информационными входами групп регистров 311, 312, 313. . . 371, 372, 373 соответственно. Вход 22 БЗУ 3 соединен с управляющими входами регистров 3i1, i= 1,7, вход 23 соединен с управляющими входами регистров 3i2, вход 24 соединен с управляющими входами регистров 3i3. Выходы регистров 311. . . 373 образуют выход блока 3.
На фиг. 4 входы 11. . . 16 через медианные фильтры 51. . . 56 соединены соответственно с выходами 11. . . 16 блока 5.
На фиг. 5 первая 11, третья 13, пятая 15 шины первого входа блока 6 соединены с первыми входами первого 20, второго 21 и третьего 22 перемножителей соответственно. Второй вход блока 6 соединен с вторыми входами первого 20, второго 21 и третьего 22 перемножителей, выходы которых соединены с первыми входами первого 23, второго 24 и третьего 25 сумматоров соответственно. Вторая 12, четвертая 14, шестая 16 шины первого входа соединены с вторыми входами первого 23, второго 24 и третьего 25 сумматоров соответственно, выходы которых образуют соответственно выходы 11. . . 13 блока 6.
На фиг. 6 вход синхронизатора 9 соединен со счетным входом первого счетчика 27, а также через второй 28 и третий 29 счетчики - с первым входом первого сумматора 30, а также через первый 31 и второй 32 преобразователи кодов - с первыми входами второго 33 и третьего 34 сумматоров, выходы первого 30, второго 33 и третьего 34 сумматоров соединены соответственно с первым вторым и третьим информационными входами первого мультиплексора 35, выход которого соединен с первым информационным входом второго мультиплексора 36, выход которого соединен с выходом 11 синхронизатора 9. Вход синхронизатора 9 соединен через первую схему 37 задержки с первым входом триггера 38, а также с вторым входом триггера 38, прямой и инверсный выходы которого соединены с управляющим входом второго мультиплексора 36, а также соединены с выходами 12 и 13 синхронизатора 9 соответственно. Выход третьего счетчика 29 соединен с первым входом схемы 39 сравнения и с информационными входом регистра 40, выход которого соединен с вторым входом схемы сравнения 39, выход которой соединен с первым входом первой схемы И 41, выход которой соединен с управляющим входом регистра 40. Выход схемы 39 сравнения соединен с управляющим входом четвертого счетчика 42, счетный вход которого соединен с выходом ГТИ 3, выход счетчика 42 соединен со счетным входом пятого счетчика 44, выход которого соединен с вторыми входами первого 30, второго 33, третьего 34 сумматоров, выход счетчика 42 соединен с управляющим входом первого мультиплексора 35, входом дешифратора 45, а также с вторым выходом синхронизатора 9, выход дешифратора 45 соединен с выходом 15 блока 9. Выход ГТИ 43 соединен с вторым входом первой схемы И 41, а также с первым входом второй схемы И 46, выход которой соединен с первым входом схемы ИЛИ 47, выход которой соединен с выходом 14 синхронизатора 9. Вход синхронизатора 9 соединен через вторую схему 48 задержки с вторым входом схемы ИЛИ 47, выход первого счетчика 27 соединен с вторым информационным входом второго мультиплексора 36, прямой выход триггера 38 соединен с вторым входом второй схемы И 46, выход схемы 39 сравнения соединен с управляющим входом счетчика 44.
Подвижный пеленгатор (фиг. 1) работает следующим образом.
Коды измеренных пеленгов αi, βi, а также соответствующие им моменты времени ti с выхода блока 1 формирования пеленгов поступают на первый вход блока 2 вычисления коэффициентов. На второй вход блока 2 вычисления коэффициентов поступают коды декартовых координат пеленгатора Xp, Yp, Zp от блока 8 инерциальной системы навигации.
Вычисленные коэффициенты по сигналам управления с первого выхода синхронизатора 9 записываются в БЗУ 3 (фиг. 3). В промежутках между тактами записи БЗУ 3 находится в режиме считывания и по тактам считывания информация из СОЗУ 31. . . . 37 записывается в регистры 311. . . 373. Порядком записи информации из СОЗУ 31. . . 37 в регистры 311. . . 373 управляет дешифратор 45 синхронизатора 9 (фиг. 6). При этом в регистры 3i1, i=  записываются коэффициенты системы уравнений (3), соответствующие i-му замеру координат; в регистры 3i2, i=
записываются коэффициенты системы уравнений (3), соответствующие i-му замеру координат; в регистры 3i2, i=  - соответствующие i-му замеру координат; в регистры 3i3, i=
- соответствующие i-му замеру координат; в регистры 3i3, i=  - соответствующие k-му замеру координат. Коды вычисленных коэффициентов записываются в блок 4 решения систем линейных алгебраических уравнений. Коды с выхода БЗУ 3 поступают на входы блока 4. Коды чисел "0" и "-1" (система (3)) полагаются "зашитыми" в соответствующие регистры блока 4 при изготовлении устройства. По сигналу запуска, который поступает от синхронизатора 9 на вход блока 4, последний отрабатывает заложенный в него порядок действия и по окончании счета по сигналу с выхода счетчика 11 коды вычисленных коэффициентов поступают на медианные фильтры блока 5 (фиг. 4). Медианные фильтры необходимы в качестве устройств статистического оценивания рассчитываемых коэффициентов, так как в реальных условиях процесс пеленгования неизбежно сопровождается флуктуационными погрешностям, искажающими истинные значения координат. Медианные фильтры выбраны потому, что они позволяют получать устойчивые к аномальным погрешностям измерений значения оценок искомых коэффициентов и не требуют априорного знания модели шумов в каналах наблюдения. Оценки искомых коэффициентов с выхода блока 5 поступают на первый вход блока 6 определения местоположения (фиг. 5).
- соответствующие k-му замеру координат. Коды вычисленных коэффициентов записываются в блок 4 решения систем линейных алгебраических уравнений. Коды с выхода БЗУ 3 поступают на входы блока 4. Коды чисел "0" и "-1" (система (3)) полагаются "зашитыми" в соответствующие регистры блока 4 при изготовлении устройства. По сигналу запуска, который поступает от синхронизатора 9 на вход блока 4, последний отрабатывает заложенный в него порядок действия и по окончании счета по сигналу с выхода счетчика 11 коды вычисленных коэффициентов поступают на медианные фильтры блока 5 (фиг. 4). Медианные фильтры необходимы в качестве устройств статистического оценивания рассчитываемых коэффициентов, так как в реальных условиях процесс пеленгования неизбежно сопровождается флуктуационными погрешностям, искажающими истинные значения координат. Медианные фильтры выбраны потому, что они позволяют получать устойчивые к аномальным погрешностям измерений значения оценок искомых коэффициентов и не требуют априорного знания модели шумов в каналах наблюдения. Оценки искомых коэффициентов с выхода блока 5 поступают на первый вход блока 6 определения местоположения (фиг. 5).
На второй вход блока 6 поступает код, пропорциональный текущему времени. Внутренняя структура блока 6 аппаратно реализует систему уравнений (1) и, следовательно, на его выходе имеют место коды, пропорциональные декартовым координатам цели хс, ус, zc на текущий момент времени, которые поступают на вход блока 7.
Работа блока 2 вычисления коэффициентов следующая (фиг. 2).
На вход 11 поступает код, пропорциональный углу места β цели, на вход 12 поступает код, пропорциональный азимуту α цели. На входы 21. . . . 23 поступают коды, пропорциональные декартовым координатам пеленгатора хр, yp, zp соответственно. На вход 13 поступает код, пропорциональный текущему времени t. На выходе преобразователя 10 кодов имеет место код, пропорциональный tgβ, на выходе преобразователя 11 - код, пропорциональный secα, на выходе преобразователя 12 - код, пропорциональный tgα, на выходе перемножителя 13 - код, пропорциональный tgβ secα, перемножителя 18 - код, пропорциональный t tgβ secα. На выходе перемножителя 19 имеет место код, пропорциональный t tgα. На выходе перемножителя 14 имеет место код, пропорциональный xptgα, перемножителя 15 - код, пропорциональный xptgβ secα. На выходах сумматоров 16 и 17 имеют место коды, пропорциональные xptgα - yp и xptgβ secα - zp соответственно. Преобразователи 11. . . 13 кодов могут быть выполнены на базе постоянных запоминающих устройств. Работа синхронизатора 9 следующая 9 (фиг. 6).
Импульсы с второго выхода блока формирования пеленгов 1 (фиг. 1) поступают на счетный вход счетчика 27, который формирует код адреса, поступающий на второй информационный вход мультиплексора 36. Импульсы с второго выхода блока 1 также поступают на второй вход триггера 38, выходной сигнал которого устанавливает СОЗУ 31. . . 37 в режим записи. На первый вход триггера 38 импульсы поступают через элемент 37 задержки, формируя на выходе сигналы считывания информации из СОЗУ 31. . . 37. Импульсы с выхода схемы 47 ИЛИ тактируют СОЗУ 31. . . 37. Импульсы с входа синхронизатора 9 поступают на счетный вход двухразрядного счетчика 28, поэтому каждый четвертый импульс переполняет его, через счетчик 29 импульс переполнения поступает на сумматоры 30, 33 и 34. После подсчета трех импульсов от ГТИ 43 импульс переполнения с выхода счетчика 42 через счетчик 44 поступает на вторые входы сумматоров 30, 33 и 34, увеличивая их содержимое на единицу. В зависимости от состояния выхода счетчика 42 к выходной шине мультиплексора 35 коммутируется один из входов. В результате на выходе мультиплексора 35 последовательно формируются коды адресов, максимально разнесенных во времени замеров, что обеспечивает достижение наилучших точностных характеристик определения местоположения объекта. Схема 39 сравнения, регистр 40 и первая схема И 41 необходимы для синхронной работы схемы. Импульсы с выходов триггера 38 управляют работой мультиплексора 36, при этом импульс записи с прямого выхода триггера 38 подключает к выходу мультиплексора 36 сигнал с выхода счетчика 27. Дешифратор 45 управляет порядком считывания информации из регистров 311. . . 373. Импульс с выхода счетчика 42 поступает на второй выход синхронизатора 9 и запускает БРСЛАУ 4. Выход второго мультиплексора 36, прямой и инверсный выходы триггера 38, выход схемы ИЛИ 47, выход дешифратора 45 образуют первый выход синхронизатора 9, который соединен с вторым входом БЗУЗ. При этом порядок подключения следующий. Выход 11 соединен с адресными входами СОЗУ 31. . . 37, выходы 12и 13 - с входами установки режима записи и считывания СОЗУ 31. . . 37, выход 14 - с синхровходом СОЗУ. Все перечисленные выходы объединены в управляющий вход 21 БЗУ 3 (см. фиг. 3). Выход 15 соединен с управляющими входами 22. . . 24 БЗУЗ. Второй выход синхронизатора соединен с входом запуска БРСЛАУ 4. Все блоки и элементы предлагаемого пеленгатора могут быть реализованы на базе типовых узлов вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| Подсистема определения дальности доплеровского радиопеленгатора | 1990 |
|
SU1797083A1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| Устройство отождествления наборов данных | 1989 |
|
SU1654810A1 |
| Измеритель частотных характеристик | 1990 |
|
SU1798721A1 |
| СПОСОБ КОНТРОЛЯ ДИАГРАММНЫХ ПАРАМЕТРОВ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РАДИОПЕЛЕНГАТОРА | 1996 |
|
RU2117308C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2298804C2 |
| УСТРОЙСТВО УПЛОТНЕНИЯ КАНАЛА СВЯЗИ | 1990 |
|
RU2024207C1 |
| АНАЛИЗАТОР НАПРЯЖЕНИЯ | 1990 |
|
RU2024880C1 |
| Устройство для формирования последовательности импульсов | 1989 |
|
SU1661974A1 |
Использование: радионавигация, геодезия, определение местоположения объекта по угломерным данным. Сущность изобретения: пеленгатор содержит блок формирования пеленгов, блок вычисления коэффициентов, буферное запоминающее устройство, блок решения систем алгебраических уравнений, блок медианных фильтров, блок определения местоположения, блок отображения, блок инерциальной системы навигации, синхронизатор. 6 ил.
ПОДВИЖНЫЙ ПЕЛЕНГАТОР, содержащий блок формирования пеленгов, синхронизатор и блок отображения, отличающийся тем, что в него введены блок вычисления коэффициентов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок медианных фильтров, блок определения местоположения, блок инерциальной системы навигации, при этом первый выход блока формирования пеленгов соединен с первым входом блока вычисления коэффициентов, выход которого подключен к первому входу буферного запоминающего устройства, выход которого соединен с первым входом блока решения систем линейных алгебраических уравнений, выход которого через блок медианных фильтров соединен с первым входом блока определения местоположения, выход которого подключен к входу блока отображения, выход блока инерциальной системы навигации соединен с вторым входом блока вычисления коэффициентов, первый и второй выходы синхронизатора подключены соответственно к вторым входам буферного запоминающего устройства и блока решения систем линейных алгебраических уравнений, первый выход блока формирования пеленгов подключен к второму входу блока определения местоположения, второй выход блока формирования пеленгов соединен с входом синхронизатора, при этом первая шина первого входа блока вычисления коэффициентов соединена с входом первого преобразователя кодов, вторая шина подключена к входам второго и третьего преобразователя кодов, выходы первого и второго перобразователей кодов соединены с первым и вторым входами первого перемножителя соответственно, первая шина второго входа подключена к первым входам второго и третьего перемножителей, вторая и третья шины второго входа соединены с первыми входами первого и второго сумматоров соответственно, третья шина первого входа блока подключена к первым входам четвертого и пятого перемножителей, выход первого перемножителя соединен с вторыми входами третьего и четвертого перемножителей, выходы второго и третьего перемножителей подключены к вторым входам первого и второго сумматоров соответственно, выход третьего преобразователя кодов соединен с вторыми входами второго и пятого перемножителей, выходом блока вычисления коэффициентов являются выходы первого, четвертого и пятого перемножителей, выход третьего преобразователя кодов, выходы первого и второго сумматоров, третья шина первого входа блока.
