Изобретение относится к железнодорожной автоматике и может быть использовано для контроля состояния участков рельсовой линии.
Известен способ контроля свободного состояния рельсовой линии, заключающийся в том, что в рельсовую линию на одном ее конце подают сигнал переменного тока, а на другом конце фиксируют сдвиг фазы сигнала и сравнивают его с заданным сдвигом фазы, соответствующим свободному состоянию рельсовой линии, и при их совпадении фиксируют свободное состояние рельсовой линии.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение точности контроля за счет отслеживания фазы сигнала приемного конца рельсовой линии при проследовании поезда по путевому участку.
Технический результат достигается тем, что в известном способе контроля свободного состояния рельсовой линии, заключающемся в том, что в рельсовую линию на одном ее конце подают сигнал переменного тока, а на другом конце фиксируют сдвиг фазы сигналов и сравнивают его с заданным сдвигом фазы, соответствующим свободному состоянию рельсовой линии, и при совпадении их фиксируют свободное состояние рельсовой линии, задают скорость увеличения сдвига фазы принятого сигнала относительно переданного, при увеличении сдвига фазы принятого сигнала относительно переданного фиксируют скорость увеличения указанного сдвига, сравнивают ее с заданной и при превышении заданной скорости увеличения сдвига фазы принятого сигнала относительно переданного фиксируют вступление поезда на контролируемый участок, после чего фиксируют максимальный сдвиг фазы принятого сигнала относительно переданного, фиксируют уменьшение указанного сдвига фазы, по которому фиксируют занятие поездом контролируемого участка, после чего сравнивают текущее значение сдвига фазы принятого сигнала относительно переданного с зафиксированным максимальным и при их равенстве повторно фиксируют максимальный сдвиг фазы принятого сигнала относительно переданного, после чего сравнивают текущий сдвиг фазы принятого сигнала относительно переданного со значением сдвига фазы принятого сигнала относительно переданного, зафиксированным до начала увеличения указанного сдвига фазы, и при их равенстве фиксируют освобождение контролируемого участка рельсовой линии.
Непрерывное отслеживание фазы сигнала на приемном конце позволяет зафиксировать приближение поезда, т.к. в этом случае фаза сигнала начинает резко увеличиваться. Увеличение фазы сигнала происходит и при высыхании балласта, однако (даже при интенсивном высыхании летом в условиях Среднеазиатской жел. дор.) скорость увеличения не превышает 1 град/час. Это позволяет проконтролировать подход поезда к контрольному участку, т.к. движение поезда даже со скоростью 5 км/ч с несколькими остановками на участке приближения существенно превышает скорость изменения фазы при высыхании. При сухом балласте и движении поезда со скоростью 20 км/час скорость изменения фазы составляет 20 град/мин, а при мокром 7 град/мин. Подход поезда к контрольному участку переводит устройство (если реализация микроэлектронная) или выбирает программу (если реализация микропроцессорная) в новый режим, а именно отслеживание максимума нарастания фазы. Причем этот максимум, как и фазу сигнала в момент вступления поезда на участок приближения, фиксируют в блоке (ячейка) памяти с тем, чтобы после ухода поезда была возможность сравнения текущего значения фазы с упомянутыми значениями. Однако прежде чем подготовить устройство (подпрограмму) к этапам сравнения текущего значения фазы с теми фазами, которые зафиксированы в памяти, необходимо зафиксировать глубокий спад фазы после максимума. Это требуется для того, чтобы исключить переход устройства (программы) к завершающим этапам работы под влиянием помехи. Этапы действия устройства (программы) наиболее просто проследить по симметричной (при равенстве сопротивлений по концам рельсовой цепи) кривой зависимости фазы напряжения приемного конца от места наложения шунта.
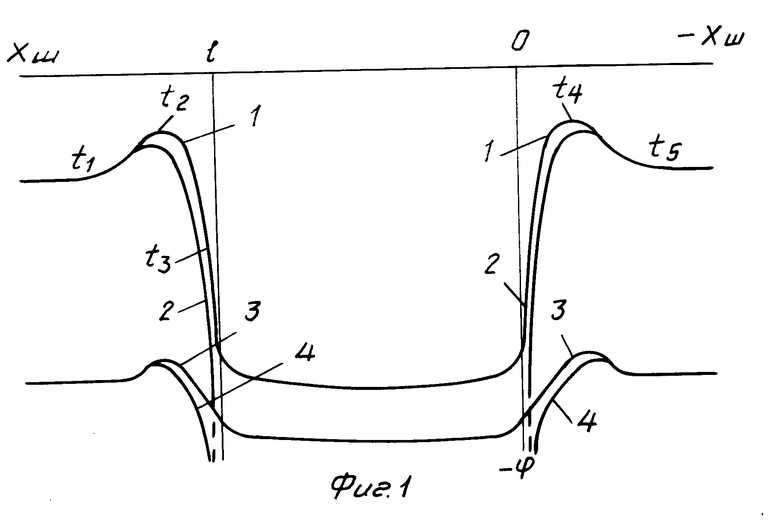
На фиг. 1 изображены кривые зависимостей напряжения приемного конца от места положения шунта ϕ= f1(XIII); на фиг. 2 представлена блок-схема устройства для реализации предлагаемого способа.
Кривые зависимостей фазы напряжения (относительно напряжения источника питания опорного напряжения) 1,2,3 и 4 рассчитаны (и экспериментально подтверждены) соответственно при rи∞ и Rш 0,06 Ом, rи ∞ и Rш 0 Ом, rи 0,1 Ом˙км и Rш 0,06 Ом, rи 0,1 и Rш0.
Устройство контроля свободного состояния рельсовой линии содержит путевые участки (рельсовые линии) 5,6 и 7, источник питания 8, подключенный к одному из входов измерителя фаз 14 и через согласующий элемент 9 к одному концу рельсовой линии 6. Ко второму концу линии через согласующий элемент 10 подсоединен полосовой фильтр 11, выход которого через ограничитель напряжения 12 соединен с пороговым элементом 13, выход которого соединен со вторым входом измерителя фаз 14, выход которого (восьмиразрядная или шестнадцатиразрядная шина) соединен с входом микропроцессора (ЭВМ) 18, выход которого через две параллельные цепи, каждая из которых содержит последовательно соединенные контакты путевых реле 15 (для путевого участка 5) и 17 (для путевого участка 7) и реле направлений 19 (нечетное направление) и 20 (четное направление), соединен с обмоткой путевого реле 16, которая также соединена с выходом микропроцессора через блокировочный контакт 16.1 реле 16.
Способ реализован следующим образом:
источник 8 выдает через согласующий элемент 9 сигнал переменного тока в рельсовую линию. При отсутствии на рельсовой линии и в непосредственной близости к ней подвижного состава фаза сигнала на приемном конце (релейный) изменяется очень медленно (в зависимости от состояния изоляции). Следует отметить, что высыхание шпал и балласта идет настолько медленно, что нарастание фазы сигнала на релейном конце (относительно опорного напряжения) не превышает 1 град/час. При намокании балласта спад фазы сигнала идет несколько интенсивнее, но все же достаточно медленно. Итак, отфильтрованный от сигналов смежных рельсовых цепей и помех сигнал поступает на вход ограничителя 12 посредством согласующего элемента 10 и фильтра 11.
Ограничитель 12 и пороговый элемент 13 выдает на второй вход измерителя фазы 14 положительный потенциал в соответствии с фазой сигнала рельсовой линии. На входе измерителя фазы в двоичном коде присутствует информация о разности фаз между опорным напряжением и сигналом. Микропроцессорное устройство в момент времени t1 (фиг.1) фиксирует интенсивное нарастание фазы сигнала, в момент времени t2 перелом характера кривой, в момент времени t3 достаточно глубокий спад фазы, в момент времени t4 соответствие в величине двух экстремумов (t2и t4), в момент времени t5 соответствие фазы (после ухода поезда) первоначальной (до вступления поезда перед моментом t1).
В микропроцессор вводятся следующие критерии: скорость нарастания фазы (с тем, чтобы отличить естественное увеличение фазы при высыхании балласта от нарастания фазы при движении поезда), Δ ϕ разница между фазами в момент времени t2 и t3 (эта разница определяется по глубине впадины по кривой 3 при очень мокром балласте), а также возможное неполное соответствие между фазами в моменты времени t2 и t4, а также t1и t5 (из-за намокания или высыхания балласта при следовании поезда по участку).
Каждый последующий этап работы микропроцессора 14 происходит только после выполнения предыдущего (t1, t2, t3, t4 и t5). После того как зафиксировано интенсивное нарастание фазы (t1) начинается отслеживание перелома кривой (t2). После фиксации экстремума (перелома) определяется необходимая глубина спада (t3), затем осуществляется контроль соответствия величины второго экстремума (t4) величине первого (t2). И, наконец, осуществляется контроль соответствия фазы напряжения рельсовой цепи после ухода поезда (t5) той, которая была до вступления (t1). После чего на выходе микропроцессора поддерживается повышенный потенциал, что позволяет возбудиться путевому реле 16. Контроль занятия рельсовой цепи наступает с момента, когда фиксируется спад фазы (t3). Если по какой-либо причине занятие участка не будет зафиксировано, то может возникнуть опасная ситуация. Для исключения этого контроль освобождения путевого участка фиксируется только после занятия участка, следующего за рассматриваемым. С этой целью в цепь возбуждения реле 16 (путевое реле) включены тыловые контакты путевых реле 15 или 17 и реле направления 19 или 20.
Смежная рельсовая цепь 7 через согласующий элемент 10 (общий для рельсовой цепи 6 и 7) подключена к приборам приемного конца рельсовой цепи 7 (ППК РЦ7).
Значение нормативного шунта может быть повышено в несколько раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВОГО УЧАСТКА И ФАЗОЧУВСТВИТЕЛЬНАЯ РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2025362C1 |
| СПОСОБ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2025355C1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2030316C1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 1992 |
|
RU2081772C1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2057668C1 |
| СПОСОБ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВХОДА ПОДВИЖНОГО СОСТАВА НА ПУТЬ | 1991 |
|
RU2025356C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2003 |
|
RU2263040C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2025358C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОГО СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2005 |
|
RU2286276C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ПУТЕВЫХ УЧАСТКОВ | 2009 |
|
RU2410267C1 |

Использование: для контроля свободного состояния рельсовой линии. Сущность изобретения: способ заключается в том, что занятие и освобождение поездом участка пути фиксируют по скорости изменения сдвига фазы сигнала на приемном конце рельсовой линии относительно переданного. 2 ил.
СПОСОБ КОНТРОЛЯ СВОБОДНОГО СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ, заключающийся в том, что в рельсовую линию на одном ее конце подают сигнал переменного тока, а на другом конце фиксируют сдвиг фазы сигнала и сравнивают его с заданным сдвигом фазы, соответствующим свободному состоянию рельсовой линии, и по их совпадению фиксируют свободное состояние рельсовой линии, отличающийся тем, что задают значение скорости увеличения сдвига фазы принятого сигнала относительно переданного соответствующее приближению поезда к участку, при увеличении сдвига фазы принятого сигнала относительно переданного фиксируют скорость увеличения указанного сдвига, сравнивают ее с заданной и при превышении заданной скорости увеличения сдвига фазы принятого сигнала относительно переданного фиксируют вступление поезда на контролируемый участок, фиксируют максимальный сдвиг фазы принятого сигнала относительно переданного, фиксируют уменьшение указанного сдвига фазы, по которому фиксируют занятие поездом контролируемого участка, сравнивают текущее значение сдвига фазы принятого сигнала относительно переданного с зафиксированным максимальным и при их равенстве сдвига повторно фиксируют максимальный сдвиг фазы принятого сигнала относительно переданного, сравнивают текущий сдвиг фазы принятого сигнала относительно переданного со значением сдвига фазы принятого сигнала относительно переданного, зафиксированным до начала увеличения указанного сдвига фазы, и по их равенству фиксируют освобождение контролируемого участка рельсовой линии.
| Аркатов В.С | |||
| Книга | |||
| Рельсовые цепи магистральных железных дорог | |||
| М.: Транспорт, 1982, с.306-308. |
