Изобретение относится к устройствам для передвижных средств, в частности, для передвижения роликовых платформ, инвалидных колясок и пр.
Известно приводное устройство для передвижных средств, содержащее ось со статором и установленный на ней с возможностью вращения ротор и электродвигатель, и обод (патент США N 5330026, 1994).
Недостатком известного устройства является низкая эффективность в пользовании.
Целью изобретения является повышение эффективности использования за счет улучшения пусковых характеристик.
Достигается это тем, что устройство имеет постоянные магниты, сердечники с катушками, датчики углового положения ротора. Ротор выполнен в виде концентрично расположенных оболочек и соединен с ободом, при этом постоянные магниты расположены на оболочках один напротив другого и с противоположной полярностью, на каждой оболочке постоянные магниты расположены с чередованием полярности, статор размещен между постоянными магнитами и несет катушки с сердечниками, соединенные по окружности со статором и расположенные с зазорами относительно постоянных магнитов, датчики углового положения закреплены на статоре и электрически связаны с катушками, катушки соединены в обмотку, имеющую две или несколько фаз, разбитые на фазные зоны с п катушками, принадлежащих одной фазе, где п 1, 2, 3, катушки в пределах фазных зон или всех фаз расположены с шагом, отличным от шага размещения постоянных магнитов на величину, равную α/(n-1) - α/n, где α угловая ширина зазора между магнитами, а датчики углового положения размещены по одному на фазу между сердечниками и с внешней стороны статора, обращенной к постоянным магнитам и по осям фазных зон при четном числе n и со сдвигом на угол, кратный половине углового шага постоянных магнитов относительно осей фазных зон при нечетном числе n.
Оболочки выполнены из магнитомягкого материала.
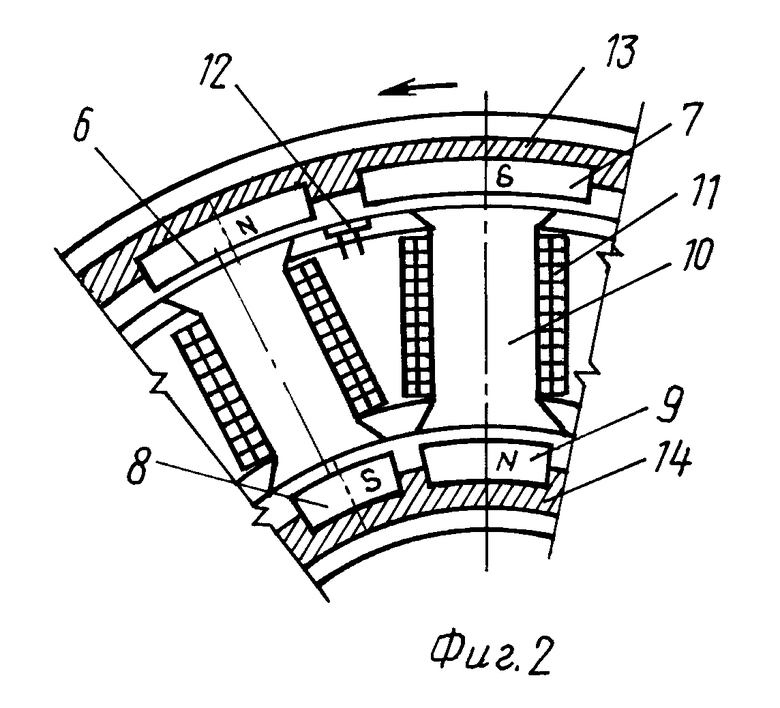
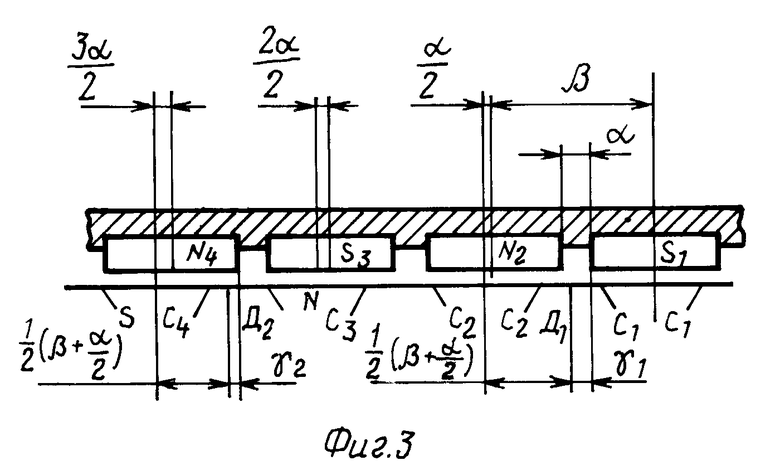
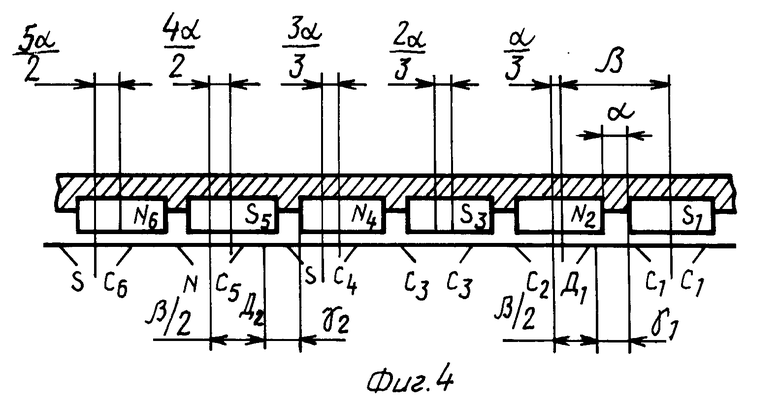
Сущность изобретения поясняется чертежами, где на фиг. 1 изображено приводное устройство в разрезе; на фиг. 2 сечение А-А, на фиг. 3 и 4 часть развертки оболочки ротора и сердечников статора с указанием двух фазных зон обмотки статора при n 2 и n 3.
Приводное устройство для передвижных средств содержит ось 1 со статором 2 и установленный на ней с возможностью вращения ротор 3, образующие электродвигатель 4, и обод 5.
Устройство имеет постоянные магниты 6, 7, 8 и 9, сердечники 10 с катушками 11, датчики углового положения 12, ротора 3, состоящие, например, из двух магниточувствительных датчиков Холла.
Ротор 3 выполнен в виде концентрично расположенных оболочек 13 и 14 из магнитомягкого материала и соединен с ободом 5.
Постоянные магниты 6, 7, 8 и 9 расположены на оболочках 13 и 14 один напротив другого и с противоположной полярностью, на каждой оболочке 13 и 14 постоянные магниты 6, 7, 8 и 9 расположены с чередованием полярности.
Статор 2 размещен между постоянными магнитами 6, 7, 8 и 9 и несет катушки 11 с сердечниками 10, соединенные по окружности со статором 2 и расположенные с зазорами относительно постоянных магнитов 6-9.
Датчики 12 углового положения закреплены на статоре 2 и электрически связаны с катушками 11.
Катушки 11 соединены в обмотку 15, имеющую две или несколько фаз, разбитые на фазные зоны с n-катушками, принадлежащих одной фазе, где n 1, 2, 3, катушки 11 в пределах фазных зон или всех фаз расположены с шагом, отличным от шага размещения постоянных магнитов 6-9 на величину, равную a/(n-1) - α/n, где α угловая ширина зазора между магнитами 6-9, а датчики 12 углового положения размещены по одному на фазу между сердечниками 10 и с внешней стороны статора 2, обращенной к постоянным магнитам 6-9 и по осям фазных зон при четном числе n и со сдвигом на угол, кратный половине углового шага постоянных магнитов 6-9 относительно осей фазных зон при нечетном числе n.
Оболочки 13 и 14 выполнены из магнитомягкого материала. Позицией 16 обозначены накладки, на которых закреплены сердечники 10 со статором 2. Оболочки 13 и 14 соединены посредством немагнитной стенки 17. Ротор 3 закрыт крышкой 18.
Датчики 12 электрически соединены с коммутатором (не показан), катушками 11 и управляются магнитным полем постоянных магнитов 6, 7.
При прохождении над датчиком 12 магнита 6 с полярностью N включается ток одного направления, а магнита 7 с полярностью S ток другого направления в катушках 11 одной фазы.
При прохождении над датчиком 12 магнитного зазора датчик 12 отключается. Расстояние между соседними постоянными магнитами 6 и 7 должно быть минимальным, но больше радиального зазора между статором 2 и магнитами 6 и 7 ротора 3 в четыре и более раз. Катушки 11 рациональнее переключать при прохождении над ними середин постоянных магнитов, когда касательные составляющие сил магнитного взаимодействия имеют меньшие значения, а радиальные максимальны.
При четном значении n, например, n 2 (фиг. 3) оптимальное положение датчика Д1 на оси симметрии фазной зоны. В данном случае
Db = α/(n-1) - α/n = α/1 - α/2..
Примем  , тогда шаг сердечников 10 будет равен
, тогда шаг сердечников 10 будет равен  и датчик Д1 будет расположен под углом
и датчик Д1 будет расположен под углом  относительно сердечников С1 или С2, γ1= γ2= 3/4α.
относительно сердечников С1 или С2, γ1= γ2= 3/4α.
При углах, больших или меньших  больше сдвигается зона отключения катушек сердечников С1, С2 относительно осей магнитов S1, N2, что приводит к снижению вращательного момента. Из фиг. 3 видно, что датчик Д2 отключается сразу, когда датчик Д1 включается. Это предельное положение. При
больше сдвигается зона отключения катушек сердечников С1, С2 относительно осей магнитов S1, N2, что приводит к снижению вращательного момента. Из фиг. 3 видно, что датчик Д2 отключается сразу, когда датчик Д1 включается. Это предельное положение. При  датчик Д2 выключается, когда датчик Д1 еще не включился, что приведет к падению вращательного момента до нуля. При Δβ > α датчик Д1 включится, когда середины магнитов N2, N4 еще не прошли над осями сердечников С2, С4. Наведенные в сердечниках С2, С4 потоки будут действовать в сторону, противоположную потокам в сердечниках С1, С3, и вращательный момент снизится.
датчик Д2 выключается, когда датчик Д1 еще не включился, что приведет к падению вращательного момента до нуля. При Δβ > α датчик Д1 включится, когда середины магнитов N2, N4 еще не прошли над осями сердечников С2, С4. Наведенные в сердечниках С2, С4 потоки будут действовать в сторону, противоположную потокам в сердечниках С1, С3, и вращательный момент снизится.
При нечетном значении n, например, n 3 (фиг. 4) оптимальное положение датчика Д1 или Д2 со сдвигом на половину шага постоянных магнитов  относительно оси фазной зоны.
относительно оси фазной зоны.
Вычислим  . Принимая
. Принимая  , определим положение датчика Д1 относительно магнита S1:
, определим положение датчика Д1 относительно магнита S1:  . Положение датчика Д1 можно назначить на любой угол, кратный β/2, в любом направлении.
. Положение датчика Д1 можно назначить на любой угол, кратный β/2, в любом направлении.
Число фаз должно быть две или более. При однофазной обмотке будут происходить пульсации вращательного момента, и возможно положение ротора 3 относительно статора 2 с пониженным вращательным моментом. Увеличение числа фаз позволяет улучшить пусковые характеристики и поднять значение минимального вращательного момента, но растет количество датчиков, усложняется система коммутации, и приходится ограничиваться числом фаз не более 5.
Количество фазных зон каждой фазы определяет соотношение количества постоянных магнитов в наборе и количества катушек в обмотке.
Количество катушек может быть разным в зависимости от передаваемой мощности и не равно количеству постоянных магнитов в одном наборе.
Приводное устройство для передвижных средств функционирует следующим образом.
При включении источника тока сигнал с датчика Д2 (фиг.3), расположенного под постоянным магнитом N4, поступает на коммутатор, который включает питание катушек 4 сердечников С3 и С4 и остальных катушек этой фазы. В сердечниках С3 и С4 наводятся магнитные поля, которые взаимодействуя с постоянными магнитами S3 и N4, продвигают ротор 3 по стрелке. При прохождении края магнита N4 над датчиком Д2 катушки сердечников отключатся пока над датчиком Д2 не остановится край магнита S3, который при дальнейшем перемещении включит датчик Д2, и в катушках сердечников С3, С4 потечет ток, наводящий в сердечниках С3 и С4 магнитные поля другого направления. Теперь магниты N4 и S3 будут отталкиваться от сердечников С3 и С4, сообщая ротору 3 перемещение в том же направлении. Так цикл повторяется во всех фазных зонах, и ротор 3 получает непрерывное вращение.
При увеличении количества фаз меньше катушек находится в отключенном состоянии, а следовательно, меньше перепады вращательного момента.
Применение многофазной обмотки с фазными зонами и переключением катушек в зонах, максимально близких к середине постоянных магнитов, позволяет также повысить КПД, уменьшить пульсацию вращательного момента и улучшить пусковые характеристики.
Данная конструкция позволяет получить безредукторный низкооборотный (20-80 об/мин) электродвигатель с высоким КПД (до 80%).
Изобретение может быть использовано при производстве роликовых платформ, инвалидных колясок и комплектующих их приводных мотор-колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ИНДУКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2212755C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2034393C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| ДВУХБАКОВАЯ СТИРАЛЬНАЯ МАШИНА С ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2098531C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ВЫСОКОСКОРОСТНОЙ УЛЬТРАЦЕНТРИФУГИ | 2005 |
|
RU2292624C1 |
| РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2478250C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СТАРТОВЫМИ ПОЛЮСАМИ | 1996 |
|
RU2103786C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ИНДУКТОРНОГО ТИПА | 1992 |
|
RU2040096C1 |
Изобретение относится к приводным устройствам для передвижных средств. Сущность изобретения заключается в том, что устройство имеет постоянные магниты, сердечники с катушками, датчики углового положения ротора, причем ротор выполнен в виде концентрично расположенных оболочек и соединены с обедом, при этом постоянные магниты расположены на оболочках один напротив другого и с противоположной полярностью, на каждой оболочке постоянные магниты расположены с чередованием полярности, статор размещен между постоянными магнитами и несет катушки с сердечниками. Данная инструкция позволяет получить безредукторный низкооборотный (20-80 об/мин) электродвигатель с высоким КПД (до 80%). 1 з.п. ф-лы, 4 ил.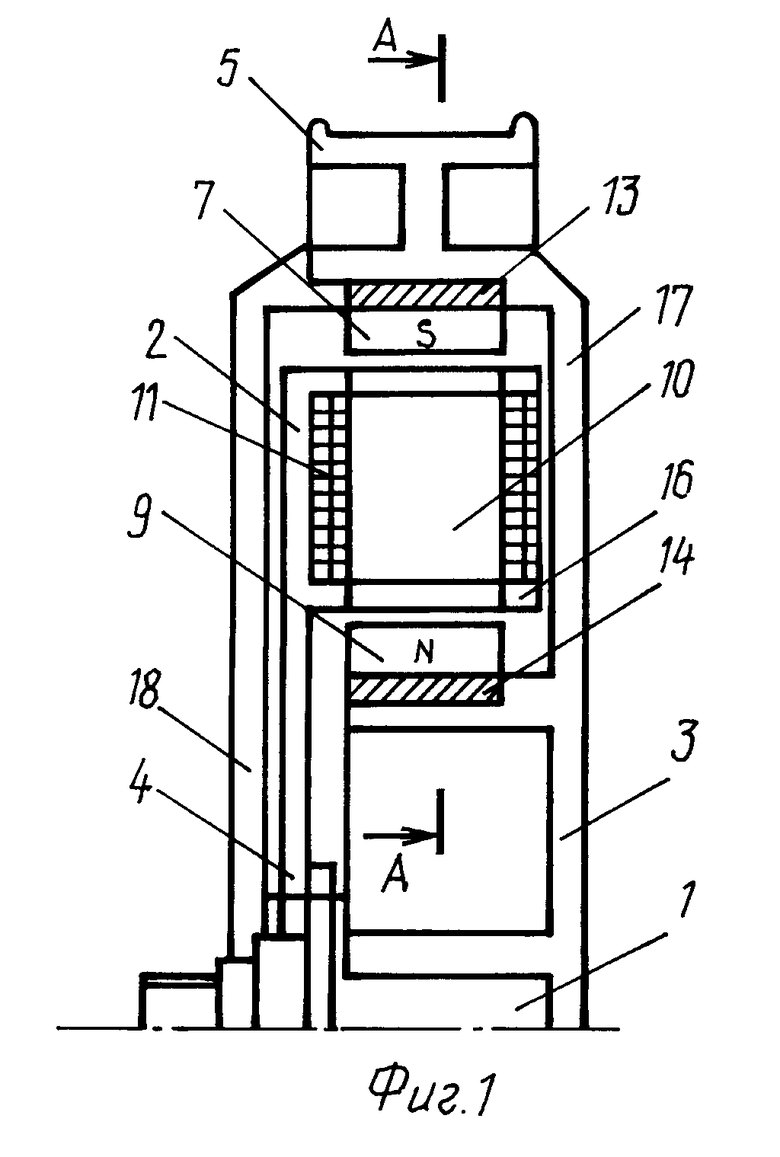
 , где α угловая ширина зазора между магнитами, а датчики углового положения размещены по одному на фазу между сердечниками и с внешней стороны статора, обращенной к постоянным магнитам, и по осям фазных зон при четном числе n и со сдвигом на угол, кратный половине углового шага постоянных магнитов относительно осей фазных зон при нечетном числе n.
, где α угловая ширина зазора между магнитами, а датчики углового положения размещены по одному на фазу между сердечниками и с внешней стороны статора, обращенной к постоянным магнитам, и по осям фазных зон при четном числе n и со сдвигом на угол, кратный половине углового шага постоянных магнитов относительно осей фазных зон при нечетном числе n.
| Патент США N 5330026, кл.А 63 С 17/12, 1994. |

