Изобретение относится к электродвигателям, которые могут быть использованы в качестве приводов высокоскоростных ультрацентрифуг для разделения различных веществ в центробежном поле, например изотопов урана.
Известен вентильный электродвигатель [Авторское свидетельство SU 1427509], содержащий ротор, постоянные магниты, внешнее ярмо и магнитопровод статора, состоящий из двух половин с зубчатыми полюсами, в пазах которого уложены катушки обмотки якоря. Датчик положения ротора содержит катушки первоначальной обмотки и катушки вторичной обмотки. К недостаткам такого электродвигателя можно отнести следующие. Необходимость в использовании первичной и вторичной обмоток для управления электродвигателем, а также распределение фазных обмоток по пазам статора приводит к потерям мощности в фазной обмотке статора. Кроме того, магнитопровод статора с зубчатыми полюсами снижает технологичность изготовления данного электродвигателя.
Для решения задачи упрощения конструкции и долговечности электродвигателя направлено изобретение [RU 2081497]. В изобретении предлагается в ярме якоря электродвигателя выполнять прорези вдоль продольной оси электродвигателя. Элементы датчиков Холла размещаются в указанных прорезях в положении, при котором их плоскости расположены вдоль радиуса двигателя. Несмотря на то, что данное изобретение позволяет существенно улучшить технологичность двигателя, задача увеличения надежности также не решена, т.к. использование датчиков Холла для управления электродвигателем снижает его ресурс эксплуатации.
Наиболее близким аналогом к предлагаемому изобретению является изобретение, описанное в патенте [JP 57193959], где предлагается однодисковый электродвигатель торцевого типа. Однако использование магнитов приводного диска в виде сегментов не позволяет использовать электродвигатель на высоких оборотах, а расположение датчика Холла на диаметре не охватываемом магнитами приводит к необходимости введения дополнительных элементов конструкции и усложнения системы управления.
Задачей изобретения является повышение КПД электродвигателя, его удельной мощности, облегчение его теплового режима.
Поставленная задача достигается тем, что в вентильном электродвигателе для высокоскоростной ультрацентрифуги статор содержит индуктивные датчики, примененные в качестве положения приводного диска электродвигателя на высоких оборотах, и датчик Холла, размещенный на одном из индуктивных датчиков и используемый в качестве датчика положения приводного диска электродвигателя на низких оборотах.
Дополнительно индуктивные датчики смещены относительно оси симметрии группы фазных катушек в сторону, противоположную направлению вращения приводного диска на угол α.
Дополнительно угол α составляет (1...5)°.
Дополнительно датчик Холла смещен относительно оси симметрии группы фазных катушек на угол ϕ.
Дополнительно угол ϕ составляет (1...25)°.
Дополнительно постоянные магниты цилиндрической формы, установлены группами, число групп Nгр (причем Nгр≥2) по два магнита и размещены по окружности со смещением на угол β между полюсами S и N, с угловым расстоянием у между группами магнитов.
Дополнительно угол β задается формулой 
Дополнительно угол γ задается формулой 
Дополнительно диаметр магнитов составляет 0,45...0,65 длины полюсного деления.
Дополнительно на теплопроводнике установлено ферритовое кольцо, замыкающее магнитный поток рассеяния постоянных магнитов приводного диска.
Дополнительно на теплопроводнике расположены ферриты на диаметре большем, чем диаметр расположения магнитов.
Дополнительно корпус статора выполнен из теплопроводящего материала, при этом в случае выполнения корпуса статора из металла расстояние от приводного диска 2 до поверхности корпуса статора в осевом направлении выполняется не менее диаметра магнита.
Дополнительно в корпусе статора установлена втулка, выполненная из материала с большим удельным электрическим сопротивлением.
Изобретение поясняется следующими чертежами.
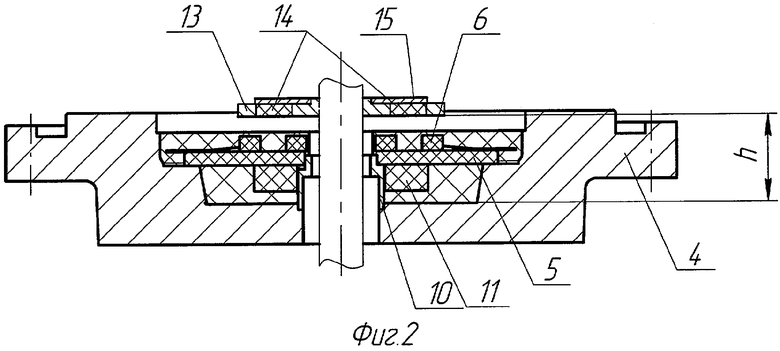
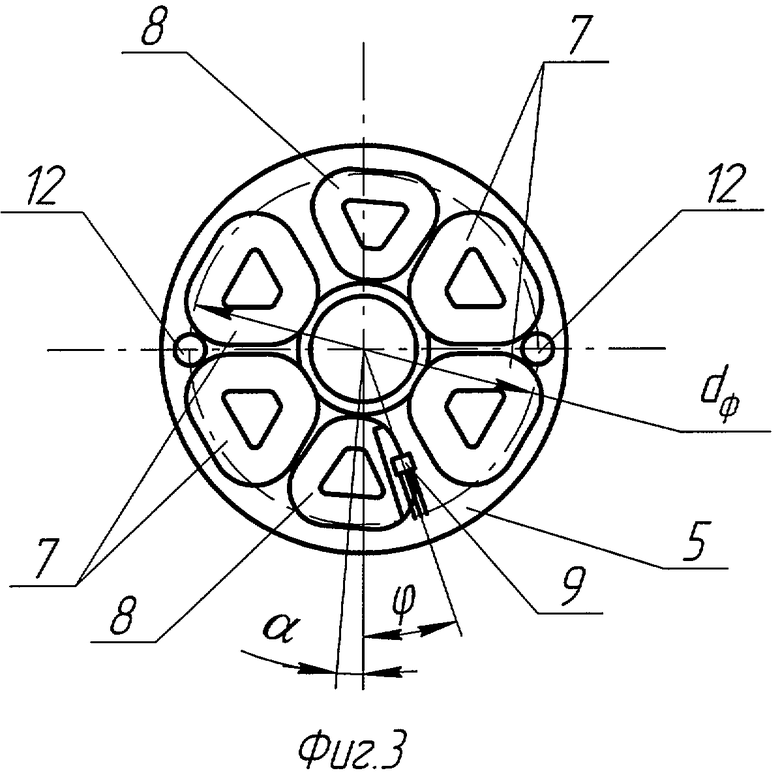
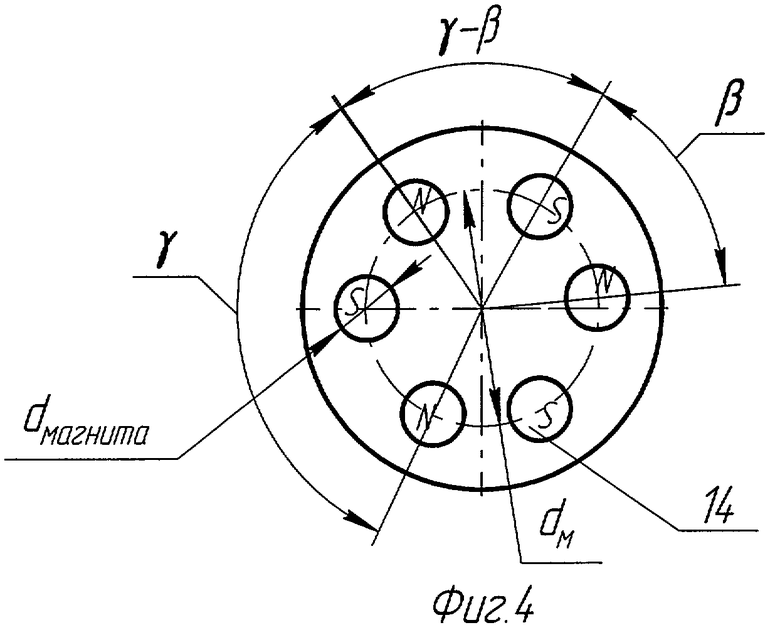
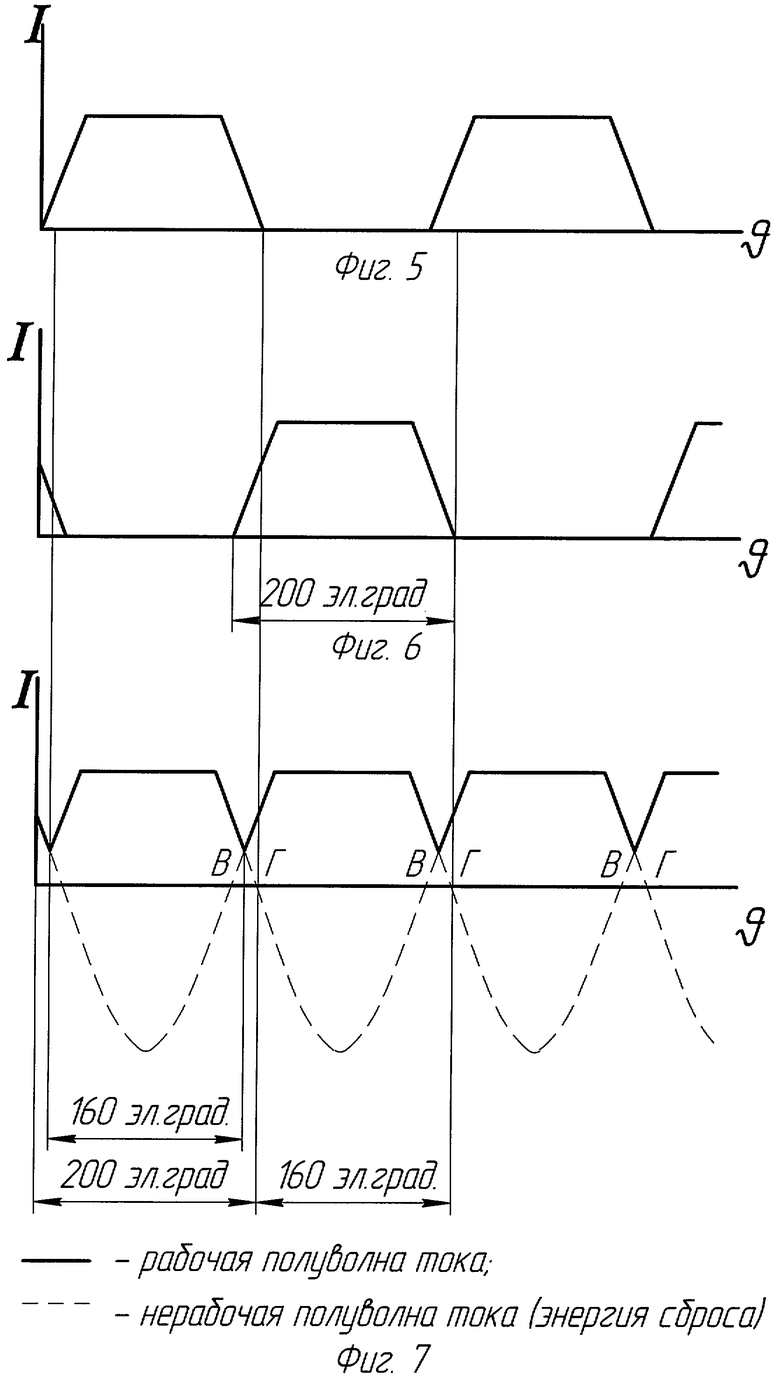
На фиг.1 представлен общий вид вентильного электродвигателя; на фиг.2 - вентильный электродвигатель (в разрезе); на фиг.3 - схема расположения обмотки статора; на фиг.4 - схема расположения магнитов приводного диска; на фиг.5 - график зависимости тока I первой фазы от угла поворота приводного диска ϑ; на фиг.6 - график зависимости тока I второй фазы от угла поворота приводного диска ϑ; на фиг.7 - график зависимости фазного тока I от угла поворота приводного диска ϑ.
Вентильный электродвигатель состоит из статора 1 и приводного диска 2, устанавливаемого на вал 3, и имеет торцевое исполнение. Статор 1 состоит из корпуса 4 и теплопроводника 5 с установленной на нем фазной обмоткой 6. Теплопроводник 5 выполнен из немагнитного электроизоляционного материала с коэффициентом теплопроводности, достаточным для эффективного съема тепла с фазной обмотки 6 статора 1.
Обмотка 6 выполнена двухфазной. Каждая фаза состоит из двух катушек 7, установленных симметрично на теплопроводнике 5. На теплопроводнике 5 расположены индуктивные датчики 8 положения приводного диска 2, смещенные относительно оси симметрии группы фазных катушек 7 в сторону, противоположную направлению вращения приводного диска 2 на угол α, который составляет (1...5)°. Фазные катушки 7 выполнены трапецеидальной формы. На один из индуктивных датчиков 8 установлен датчик Холла 9, смещенный относительно оси симметрии группы фазных катушек на угол ϕ, который составляет (1...25)°.
В корпусе 4 статора 1 установлена втулка 10, выполненная из материала с магнитным сопротивлением большим, чем у материала корпуса статора.
Под теплопроводником 5 установлено ферритовое кольцо 11. На теплопроводнике 5 диаметрально друг другу установлены ферриты 12 на диаметре dф.
Приводной диск 2 состоит из диска 13, установленных в нем постоянных магнитов 14 цилиндрической формы из сплава Nd-Fe-B и напрессованного на диск 13 стального магнитопровода 15, усиливающего индукцию магнитов 14. Ферритовое кольцо 11 замыкает магнитный поток рассеяния постоянных магнитов 14 приводного диска 2.
Магниты 14 установлены группами, число групп Nгр (причем Nгр≥2) по два магнита со смещением на угол β между полюсами "S" и "N" с угловым расстоянием γ между группами магнитов. При этом угол β задается формулой  , а угловое расстояние γ задается формулой
, а угловое расстояние γ задается формулой 
Магниты 14 установлены таким образом, что диаметр dф расположения ферритов 12 больше диаметра dм расположения магнитов 14 (dф≥dм), при этом диаметр магнитов 14 (dмагнита) составляет 0,45...0,65 длины полюсного деления τ. Под длиной полюсного деления τ понимается длина дуги между центрами магнитов соседних магнитов в группе, которая определяется формулой:
где γ - угловое расстояние между группами магнитов.
Корпус 4 выполнен из теплопроводящего материала (например, металл, керамика). В случае выполнения корпуса 4 из металла расстояние h от приводного диска 2 до поверхности корпуса статора в осевом направлении выполняется не менее диаметра магнита 14 (h≥dмагнита).
Электродвигатель работает следующим образом. При отсутствии тока в фазных катушках 7 обмотки 6 статора 1 приводной диск 2 электродвигателя принимает однозначное положение за счет взаимодействия ферритов 12 с магнитами 14. Смещение датчика Холла 9 на угол ϕ обеспечивает задание требуемого направления вращения в момент пуска вентильного электродвигателя в зависимости от положения приводного диска 2, а установка датчика Холла 9 на индуктивном датчике 8 обеспечивает при малой скорости вращения электродвигателя высокое значение соотношения сигнал/шум, снимаемого с датчика Холла 9. Смещение индуктивных датчиков 8 на угол α относительно оси симметрии группы фазных катушек 7 в сторону, противоположную направлению вращения приводного диска 2, обеспечивает опережающее срабатывание электронного коммутатора и своевременную коммутацию фаз вентильного электродвигателя.
При повороте приводного диска 2 электродвигателя на угол γ-β в статоре 1 происходят следующие процессы.
При низких скоростях вращения сигнал с индуктивных датчиков 8 меньше сигнала с датчика Холла 9, и управление электродвигателем осуществляется от датчика Холла 9, который формирует уровни сигнала, соответствующие логическому "0" или "1". При повороте приводного диска 2 изменяется направление магнитного потока, вследствие чего сигнал с датчика Холла 9 меняется на противоположный. Далее при разгоне за счет увеличения сигнала с индуктивных датчиков 8 происходит переключение управления с датчика Холла 9 на индуктивные датчики 8. При изменении направления магнитного потока изменяется знак противо-ЭДС, снимаемого с индуктивных датчиков 8. Вследствие изменения сигнала с датчика Холла 9 или величины противо-ЭДС индуктивных датчиков 8 формируется сигнал на коммутацию фаз электродвигателя.
За счет смещения магнитов 14 механическая характеристика двигателя получается такой, что продолжительность работы каждой фазы больше, чем продолжительность ее нерабочего состояния. Тем самым достигается более равномерная механическая характеристика. При диаметре магнитов 14, составляющем 0,45...0,65 длины полюсного деления τ, исключается возможность возникновения "мертвых" точек (таких положений ротора, при которых подача тока в обмотки статора не приводит к появлению крутящего момента).
Форма тока при включении первой и второй фазы и суммарный ток вентильного электродвигателя при управлении от индуктивных датчиков 12 представлены на фиг.5, 6, 7 соответственно. Как видно из фиг.7, переключение фаз происходит в зоне положительной полуволны (участки ВГ), что достигается за счет смещения магнитов 14 приводного диска 2. Тем самым исключается "мертвая" точка при работе электродвигателя от индуктивных датчиков 8. Кроме того за счет смещения магнитов 14 достигается наиболее полное перекрытие полюсами магнитов рабочих сторон фазных катушек 7 при вращении приводного диска 2. А за счет выполнения фазных катушек 7 трапецеидальной формы направление касательной к траектории движения магнитов 14 практически перпендикулярно виткам рабочей стороны фазных катушек 7.
При больших скоростях вращения увеличивается частота изменения направления магнитного поля, индуцируемого магнитами 14 приводного диска 2. Расположение ферритов 14 на диаметре большем, чем диаметр расположения магнитов (dф≥dм), позволяет уменьшить потери мощности вентильного электродвигателя, возникающие вследствие взаимодействия магнитного потока постоянных магнитов 14 приводного диска 2 с ферритами 14. Применение ферритового кольца 11, замыкающего магнитный поток рассеяния постоянных магнитов 14 приводного диска 2, устранение металла корпуса 4 статора 1 под постоянными магнитами 14 приводного диска 2 (или выполнение корпуса 4 статора 1 из неметаллических материалов) и установка втулки 10, выполненной из материала с большим удельным электрическим сопротивлением, позволяет уменьшить потери от вихревых токов, возникающих в элементах статора. Установка стального магнитопровода 15 на диск 13 позволяет усилить индукцию магнитов 14 в воздушном зазоре вентильного электродвигателя, а следовательно, и в фазных катушках 7 и демпфировать магнитный поток рассеяния постоянных магнитов в области, находящейся вне рабочего зазора электродвигателя. Таким образом, рабочий момент и энергетические показатели электродвигателя улучшаются. Одновременно втулка 10 защищает элементы конструкции статора от механических повреждений при аварийных ситуациях, возникающих в процессе работы электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2098908C1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СТАРТЕР-ГЕНЕРАТОР С ВОЗМОЖНОСТЬЮ САМОДИАГНОСТИКИ | 2016 |
|
RU2654209C2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖНЫХ СРЕДСТВ | 1995 |
|
RU2074761C1 |
| Вентильный электродвигатель | 1985 |
|
SU1403268A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2054784C1 |
| Бесконтактный электродвигатель | 1989 |
|
SU1674327A1 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
Изобретение относится к области электротехники и может быть использовано в электроприводе высокоскоростных ультрацентрифуг для разделения различных веществ в центробежном поле, например изотопов урана. Техническим результатом является повышение КПД электродвигателя, его удельной мощности, облегчение его теплового режима. В вентильном электродвигателе для высокоскоростной ультрацентрифуги статор содержит индуктивные датчики и датчик Холла, размещенный на одном из индуктивных датчиков. Индуктивные датчики смещены относительно оси симметрии группы фазных катушек в сторону, противоположную направлению вращения приводного диска на угол α, который составляет (1...5)°. Датчик Холла смещен относительно оси симметрии группы фазных катушек на угол ϕ, который составляет (1...25)°. Постоянные магниты с диаметром 0,45...0,65 длины полюсного деления установлены группами по два магнита (число групп Nгр.≥2) по окружности со смещением на угол β между полюсами S и N. 12 з.п. ф-лы, 7 ил.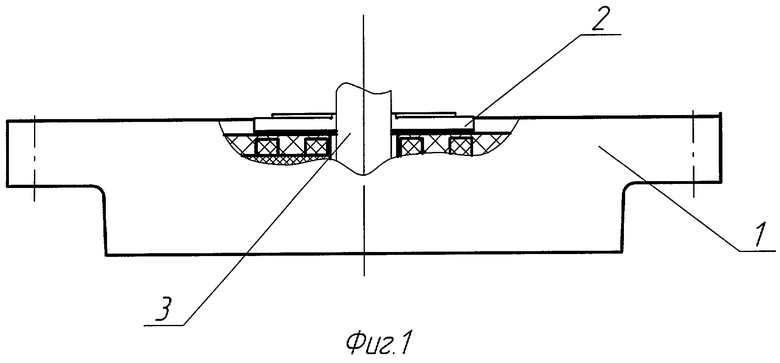
| ВЕНТИЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ ПРИВОДА МЕХАНИЗМОВ БЫТОВОЙ И МЕДИЦИНСКОЙ ТЕХНИКИ | 1992 |
|
RU2081497C1 |
| НЕРЕВЕРСИВНЫЙ БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2152681C1 |
| Вентильный электродвигатель | 1977 |
|
SU681515A1 |
| Вентильная электрическая машина | 1989 |
|
SU1774438A1 |
| МАССАЖНОЕ КРЕСЛО | 1991 |
|
RU2020915C1 |
| US 4737675 А, 11.04.1988 | |||
| ВАКЦИНА ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ БРУЦЕЛЛЕЗА | 1994 |
|
RU2076493C1 |
| DE 3625485 А, 05.03.1987 | |||
| КОАКСИАЛЬНАЯ ТЕРМИСТОРНАЯ ВСТАВКА | 0 |
|
SU246670A1 |

