Изобретение относится к измерительной технике и может быть использовано при измерении крутящего момента на вращающихся и невращающихся валах, например, при стендовых испытаниях электромеханических передач планетоходов.
Известно устройство для измерения крутящего момента, содержащее упругий вал, метку первого сечения упругого вала и датчик метки первого сечения, метку второго сечения упругого вала и датчик метки второго сечения, причем метки жестко зафиксированы относительно соответствующих сечений упругого вала, блок измерения временного сдвига или (и) разности фаз сигналов датчиков меток первого и второго сечений [1]
Недостатком устройства является то, что точность измерения крутящего момента зависит от стабильности угловой скорости упругого вала; кроме того, устройство не позволяет измерять крутящий момент на невращающихся валах.
Известно устройство для измерения крутящего момента, содержащее упругий вал, метку первого сечения упругого вала и датчик метки первого сечения, метку второго сечения и датчик метки второго сечения, ротор, установленный с возможностью вращения вокруг упругого вала, электромеханический привод вращения меток первого и второго сечений, блок измерения временного сдвига или (и) разности фаз сигналов датчиков меток первого и второго сечений, причем метки первого и второго сечений расопложены на роторе, датчики меток обоих сечений и двигатель электромеханического привода жестко зафиксированы на неподвижном основании [2]
Недостатком устройства является зависимость точности измерения крутящего момента на вращающемся валу от стабильности угловой скорости вала.
По своей технической сущности это устройство наиболее близко к заявляемому техническому решению, поэтому оно принято за прототип.
Задачей изобретения является повышение точности измерения крутящего момента на вращающемся валу.
Отличие заявляемого технического решения от прототипа заключается в том, что датчик метки первого сечения и двигатель электромеханического привода установлены с жесткой фиксацией относительно первого сечения упругого вала, а датчик метки второго сечения установлен с жесткой фиксацией относительно второго сечения упругого вала.
Другими отличиями является то, что:
устройство снабжено шариковым подшипником качения, причем первая опорная поверхность подшипника закреплена относительно первого сечения упругого вала, а ротор закреплен относительно второй опорной поверхности подшипника;
на первом и втором сечениях упругого вала закреплены упоры, установленные с возможностью взаимного контактирования при воздействии на упругий вал нагрузок, превышающих его рабочий диапазон;
устройство снабжено датчиком скручивания упругого вала на предельно допустимый угол;
датчики меток первого и второго сечений выполнены в виде фотоэлектрических преобразователей с источником света и фотоприемником, метки первого и второго сечений выполнены в виде прерывателей света фотоэлектрических преобразователей, каждый прерыватель света выполнен в виде соосной упругому валу цилиндрической оболочки с продольной щелевой диафрагмой, а оптические оси фотоэлектрических преобразователей расположены перпендикулярно оси упругого вала;
прерыватели света и фотоэлектрические преобразователи расположены таким образом, что при ненагруженном упругом вале разность фаз сигналов первого и второго фотоэлектрических преобразователей составляет 180 градусов;
устройство снабжено кожухом, охватывающим фотоэлектрические преобразователи и прерыватель света, причем прерыватели света и внутренняя поверхность кожуха снабжены светопоглощающим покрытием.
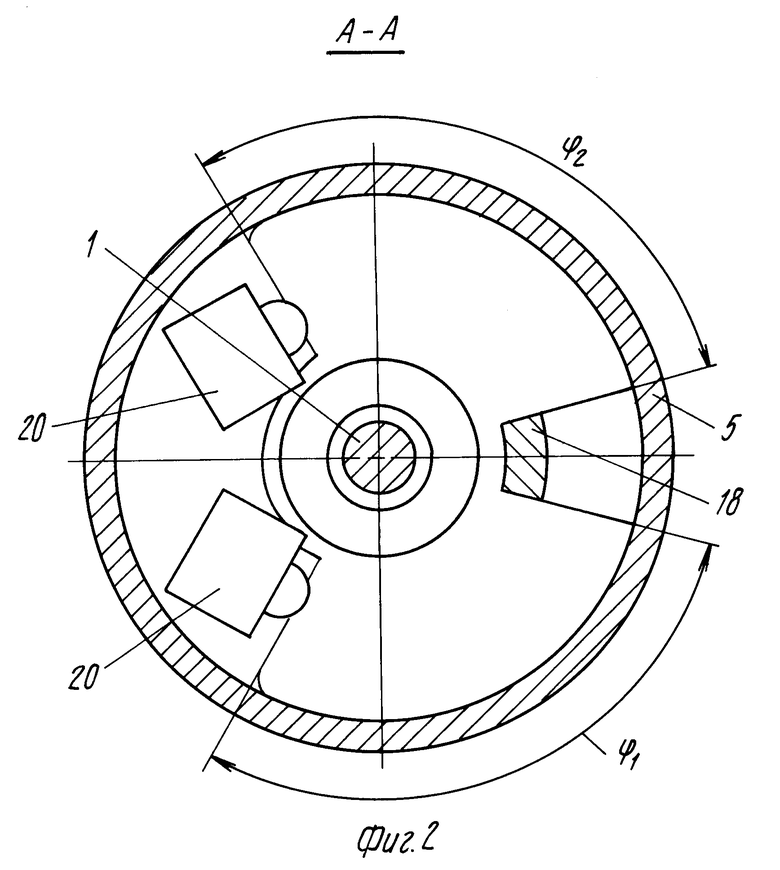
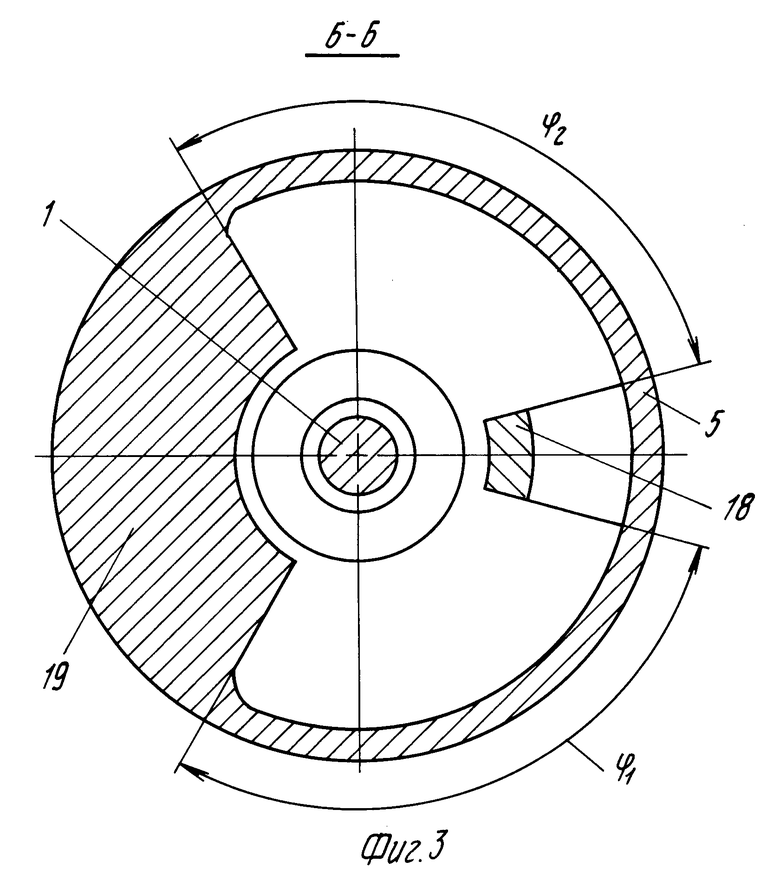
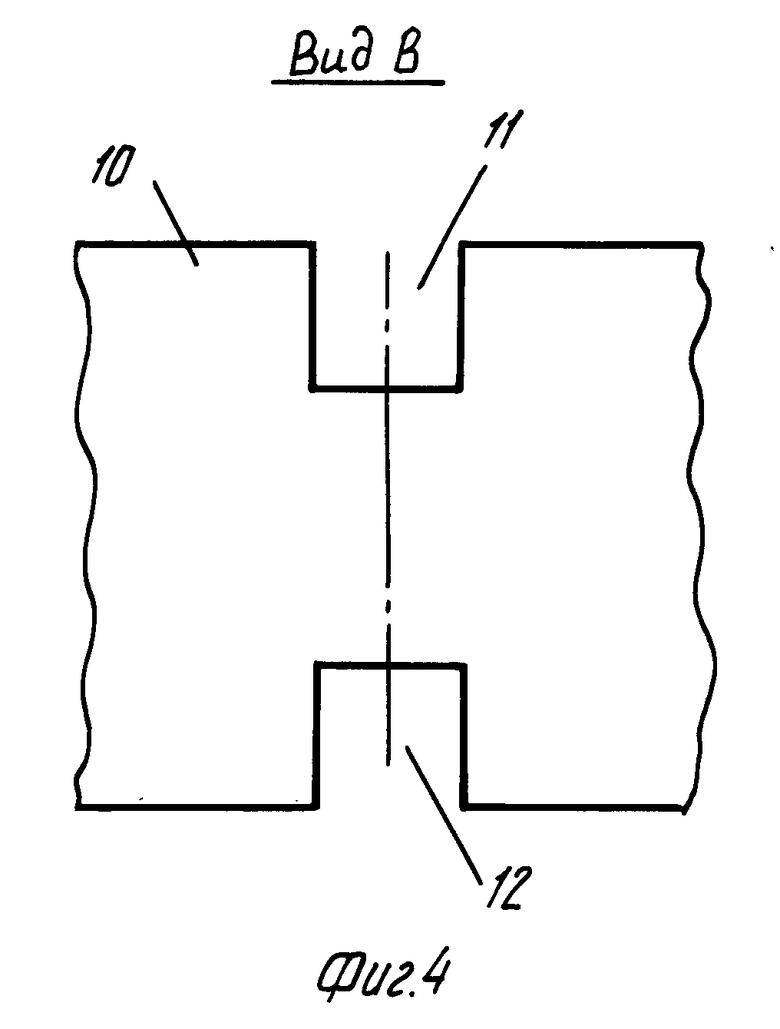
На фиг. 1 изображен общий вид устройства для измерения крутящего момента, на фиг. 2 то же, сечение А-А фиг. 1, на фиг. 3 сечение Б-Б фиг. 1, на фиг. 4 вид В фиг. 1.
Упругий вал 1, выполненный в виде торсиона, при помощи своих шлицевых хвостовиков 2 и 3 устанавливается на испытуемом устройстве в цепи передачи крутящего момента (не показано). На первом хвостовике 2 упругого вала 1 жестко установлен первый корпус 4, на втором хвостовике 3 упругого вала 1 жестко установлен второй корпус 5. Между корпусами 4 и 5 установлен подшипник качения 6. Ротор 7 установлен на корпусе 4 через подшипники качения 8 соосно с упругим валом 1. На роторе 7 закреплены дополнительные грузы 9.
Ротор 7 имеет прерыватель света 10, выполненный в виде цилиндрической оболочки с двумя соосными продольными щелевыми диафрагмами 11 и 12. На корпусе 4 установлен фотоэлектрический преобразователь 13, на корпусе 5 - фотоэлектрический преобразователь 14. Каждый фотоэлектрический преобразователь содержит источник света в виде светодиода типа АЛ107 и фотоприемник в виде фотодиода типа ФД-256. Преобразователи 13 и 14 расположены таким образом, что их оптические оси расположены в перпендикулярной оси упругого вала 1 плоскости и при ненагруженном упругом вале 1 сдвинуты друг относительно друга на 180 градусов.
На корпусе 4 закреплен электродвигатель 15 постоянного тока типа ДПР-32 и редуктор 16, выходной вал редуктора 16 с шестерней 17 кинематически связан с ротором 7.
Корпус 4 имеет упор 18, корпус 5 снабжен упором 19 и датчиком скручивания упругого вала 1 на предельно допустимый угол, выполненным в виде двух концевых выключателей 20 типа КМ1. Упор 18 и упор 19 выполнены таким образом, что они контактируют при скручивании упругого вала на угол Φ1 в одну сторону и угол Φ2 в другую сторону, причем углы Φ1 и Φ2 являются предельно допустимыми углами скручивания вала 1. Концевые выключатели 20 расположены таким образом, что они взаимодействуют с упором 18 при скручивании упругого вала 1 на угол Φ1 или угол Φ2
Кожух 21 закреплен на корпусе 4 и выполнен охватывающим фотоэлектрические преобразователи 13, 14 и прерыватель света 10. Поверхности кожуха 21, ротора 7 с прерывателем света 10, корпусов преобразователей 13 и 14, корпусов 4 и 5 снабжены светопоглощающим покрытием. На кожухе 21, выполненном из алюминиевого сплава марки Д16Т, светопоглощающее покрытие нанесено методом анодного оксидирования с наполнителем сажей, а на прерывателе света 10, выполненном из стали марки 40Х, светопоглощающее покрытие нанесено методом химического оксидирования с промасливанием. Светопоглощающее покрытие корпусов преобразователей 13 и 14, корпусов 4 и 5 выполнено аналогичным образом.
Фотоэлектрические преобразователи 13 и 14 через токосъемные кольца 22 электрически связаны с блоком измерения временного сдвига и (или) разности фаз сигналов преобразователей 13 и 14, электродвигатель 15 с источником питания типа Б5-47, а концевые выключатели 20 с устройством световой и звуковой сигнализации (не показано). Блок измерения временного сдвига и (или) разности фаз сигналов преобразователей 13 и 14 и устройство сигнализации выполнено по известному принципу.
В описанном устройстве для измерения крутящего момента место установки первого корпуса 4 на первом хвостовике 2 является первым сечением упругого вала 1, место установки второго корпуса 5 на втором хвостовике 3 вторым сечением упругого вала 1, щелевая диафрагма 11 меткой первого сечения, щелевая диафрагма 12 меткой второго сечения, фотоэлектрический преобразователь 13 датчиком метки первого сечения, фотоэлектрический преобразователь 14 датчиком метки второго сечения.
Работа устройства происходит следующим образом.
Напряжение с источника питания через токосъемные кольца 22 подается на электродвигатель 15, который через редуктор 16 с шестерней 17 с постоянной угловой скоростью вращает ротор 7 с прерывателем света 10 и диафрагмой 11 и 12 относительно вала 1.
Постоянство скорости вращения ротора 7 достигается стабильностью напряжения питания электродвигателя 15, а также установкой дополнительных грузов 9, выполняющих роль маховика.
В определенный момент времени диафрагма 11 пересекает оптическую ось преобразователя 13, на выходе преобразователя 13 формируется электрический сигнал, который через токосъемные кольца 22 поступает на первый вход блока измерения. После поворота ротора 7 на некоторый угол γ диафрагма 12 пересекает оптическую ось преобразователя 14, на выходе преобразователя 14 формируется электрический сигнал, который через токосъемные кольца 22 поступает на второй вход блока измерения, блок измерения определяет угол g, который является разностью фаз сигналов преобразователей 13 и 14.
При действии на упругий вал 1 крутящего момента хвостовик 2 с корпусом 4 поворачивается относительно хвостовика 3 с корпусом 5 на некоторый угол a, при этом изменяется взаимное положение и разность фаз сигналов преобразователей 13 и 14.
Крутящий момент определяется по формулам
Mкр= K•α и α = γ-γо,
где Мкр действующий на вал 1 крутящий момент;
К постоянный коэффициент, определяемый при градуировке устройства для измерения крутящего момента;
α угол скручивания упругого вала 1;
g разность фаз сигналов преобразователей 13 и 14 при действии на упругий вал 1 крутящего момента;
gо разность фаз сигналов преобразователей 13 и 14 при ненагруженном упругом вале 1.
При действии на упругий вал 1 крутящего момента, превышающего рабочий диапазон измерения, вал 1 скручивается на угол Φ1 (или Φ2, упор 18 корпуса 4 контактирует с упором 19 корпуса 5 и дальнейшее скручивание вала 1 не происходит, что позволяет предотвратить его поломку.
Сила, возникающая в месте контакта упора 18 с упором 19, уравновешивается силой, передаваемой между корпусами 4 и 5 через подшипник 6. Это предотвращает изгиб корпусов 4 и 5, а также связанного с ними вала 1, что предохраняет устройство от поломки и повышает точность измерения.
При скручивании упругого вала на угол Φ1 (или Φ2) упор 18 взаимодействует с концевым выключателем 20, электрический сигнал которого через токосъемные кольца 22 поступает на устройство сигнализации, которое световым и звуковым сигналом сообщает о том, что в данный момент времени на устройство для измерения крутящего момента действует нагрузка, превышающая допустимый уровень.
Внешний свет задерживается кожухом 21 и не попадает на фотодиоды преобразователей 13 и 14. Свет светодиодов преобразователей 13 и 14 не отражается от светопоглощающего покрытия поверхностей кожуха 21, ротора 7 с прерывателем света 9, корпусов преобразователей 13 и 14, корпусов 4 и 5. Это предотвращает попадание на фотодиоды преобразователей 13 и 14 внешнего света и отраженного света светодиодов преобразователей 13 и 14 и повышает помехозащищенность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ НОРМАЛЬНО ЗАМКНУТЫЙ ТОРМОЗ | 1996 |
|
RU2143080C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 1998 |
|
RU2164692C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА "ЧЕРВЯЧНЫЙ ХОМУТ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2021052C1 |
| УЗЕЛ БУРОВОГО СТЕНДА | 1992 |
|
RU2021461C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2188352C2 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО СИСТЕМА ПОДРЕССОРИВАНИЯ | 1993 |
|
RU2041080C1 |
| ГИДРООБЪЕМНО-МЕХАНИЧЕСКАЯ ПЕРЕДАЧА ПЛАНЕТАРНОГО ТИПА ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2045416C1 |
| Стенд для испытания электродвигателей | 1991 |
|
SU1812468A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭНЕРГОУСТАНОВОК | 2018 |
|
RU2673869C1 |
Использование: измерение крутящего момента на вращающихся и невращающихся валах при стендовых испытаниях редукторов и электромеханических приводов. Сущность изобретения: устройство содержит упругий вал, метки двух сечений упругого вала и соответствующие датчики меток, ротор, установленный с возможностью вращения вокруг упругого вала, электромеханический привод вращения ротора. Метки первого и второго сечения расположены на роторе, датчик метки первого сечения и двигатель электромеханического привода установлены с жесткой фиксацией относительно первого сечения упругого вала, а датчик второго сечения установлен с жесткой фиксацией относительно второго сечения упругого вала. 6 з.п. ф-лы, 4 ил.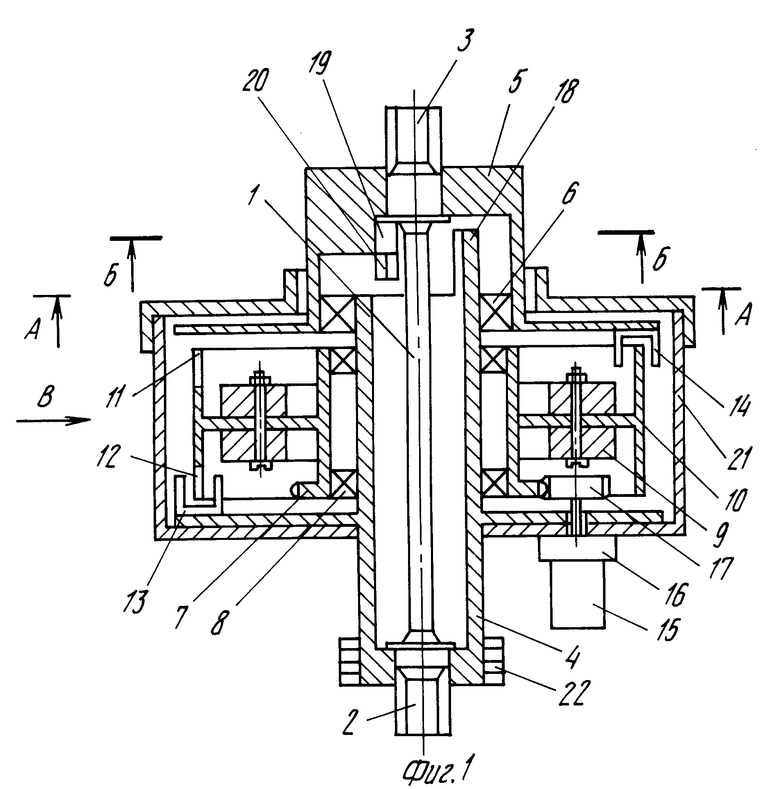
| Фролов Л.Б | |||
| Измерение крутящего момента | |||
| - М.: Энергия, 1967, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Успенский В.В., Вандышев Б.А., Жбырь С.И | |||
| Современное состояние и перспективы развития средств измерения крутящего момента | |||
| - М.: ВНИИКИ, 1974, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
