Изобретение относится к транспортному машиностроению, в частности к многоопорным транспортным средствам с активной управляемой системой подрессоривания.
Известна управляемая система подрессоривания [1] содержащая комбинированные амортизаторы, включающие датчики ускорения, систему клапанов, силовой цилиндр, гидронасос, гидроаккумуляторы, сливной бак, регулируемый демпфер для гашения свободных колебаний корпуса, временно переключающийся при большом расходе энергии в режим работы насоса и дополнительно к основному гидронасосу, заряжающий гидроаккумуляторы, энергия которых расходуется в последующем на управление положением корпуса транспортного средства.
Недостаток системы в том, что она периодически работает или в активном режиме, или в режиме насоса. В последнем случае оно не может выполнять свои прямые функции активного подрессоривания.
Известна подвеска с "упреждением", реагирующая на профиль дороги впереди идущего транспортного средства [2]
В этой системе автоматического регулирования положением кузова содержится локатор и система управления, вырабатывающая значение ускорения кузова, как фактическое так и желаемое. Разница между ними подается на серводвигатель, который приводит в движение золотник гидросистемы, управляющей характеристиками подвески.
Недостаток приведенного устройства заключается в отсутствии возможности рекуперации энергии.
Целью изобретения является повышение эффективности гашения колебаний корпуса, снижение энергозатрат.
Для этого предлагается способ демпфирования, который заключается в том, что кинетическую энергию вертикальных колебаний корпуса преобразуют в подвесках средних опор в энергию давления, аккумулируют ее, а затем передают в подвески крайних опор, где создают стабилизирующий момент от угловых колебаний корпуса.
Ввиду того, что угловые колебания машины происходят в основном вокруг центра масс, управление подвесками крайних опор для этой цели наиболее эффективно, однако для этого требуется больший расход жидкости, чем на подвесках средних опор, работающих в основном на гашение вертикальных колебаний корпуса. Производительности нагнетающего насоса в системе подрессоривания часто оказывается недостаточно, а устанавливать насос большей производительности во многих случаях невозможно из-за компоновочных затруднений. В то же время в средних опорах поглощается большое количество энергии, которую можно не рассеивать в пространстве, а предварительно накопив, направлять на работу в системе подрессоривания крайних опор в виде энергии давления.
Для реализации предложенного способа создана система подрессоривания, содержащая управляемую подвеску крайних опор, систему управления, насос, напорные магистрали, сливной бак и подпружиненные рычаги. В ней каждый из подпружиненных рычагов снабжен парой динамически автономных гидроцилиндров, установленных по обе стороны от оси вращения рычага и шарнирно соединенных штоками с рычагом, рабочие полости каждого из которых соединены с нагнетательной магистралью высокого давления на средних опорах обратными клапанами, на крайних через управляемые дроссели и всасывающими клапанами с магистралью низкого давления, причем каждый гидроцилиндр пары снабжен гидропневмоаккумулятором, один из которых соединен с нагнетательной магистралью высокого давления, а другой с магистралью низкого давления, снабженной дополнительным подкачивающим насосом, установленным в начале магистрали низкого давления.
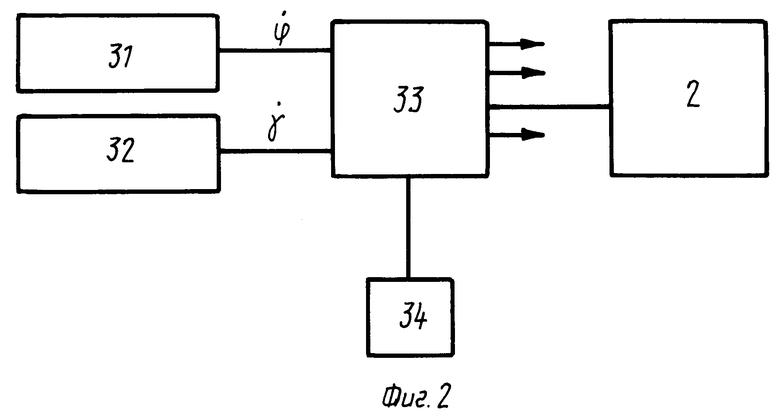
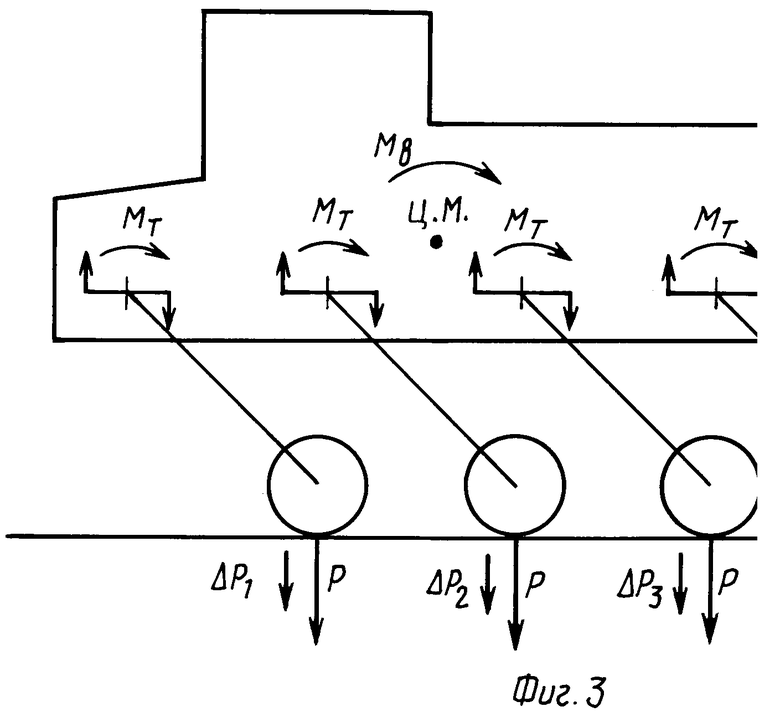
На фиг. 1 изображена схема системы подрессоривания многоопорного транспортного средства; на фиг. 2 функциональная схема управления; на фиг. 3 схема сил, действующих на подвеску при преодолении препятствия.
Устройство содержит корпус 1 с индивидуальными подвесками опор, причем крайние подвески выполнены управляемыми и содержат управляемый дроссель 2, систему 3 управления, нагнетательную магистраль 4 высокого давления, магистраль 5 низкого давления и рабочие гидроцилиндры 14 и 15.
В начале нагнетательной магистрали установлен насос 6, а в ее конце предохранительный клапан 7. В начале магистрали 5 установлены подкачивающий насос 8 и запорный клапан 9. В обход их, соединяя магистраль 5 со сливным баком 10, установлен предохранительный клапан 11.
Система подрессоривания содержит индивидуальные подвески, каждая из которых состоит из подпружиненного рычага 12, на котором установлено ходовое колесо 13. Каждый рычаг снабжен парой динамически автономных гидроцилиндров (14 и 15 для крайних подвесок и 16, 17 для средних), шарнирно соединенных со своими рычагами штоками 18. Каждый гидроцилиндр пары снабжен гидропневмоаккумулятором 19-22 соответственно, причем гидропневмоаккумуляторы 19 и 21 соединены с магистралью 5, а гидропневмоаккумуляторы 20 и 22 с магистралью 4.
Гидроцилиндры 16 и 17 средней подвески через обратные клапаны 23 и 24 соединены с нагнетающей магистралью 4 и всасывающими клапанами 25 и 26 с магистралью 5. Гидроцилиндры 14 и 15 крайней подвески также соединены с магистралью 5 всасывающими клапанами 27 и 28 соответственно.
Система управления состоит из блока 33 управления, выход которого соединен с управляемыми дросселями 2 крайних подвесок. Гиротахометры 31 и 32 соединены с блоком 33. Гидроцилиндры снабжены датчиками 34 давления, а магистраль высокого давления датчиком 29 давления.
Система работает следующим образом.
При колебаниях корпуса 1 машины гиротахометры 31 и 32 вырабатывают управляющие воздействия (сигналы), которые подаются в блок 33. Уровень сигналов гиротахометров 31, 32 пропорционален угловым скоростям колебаний корпуса в продольной и поперечной плоскостях соответственно.
Усиленный сигнал определенного знака из блока 33 поступает в электромагнит управляемого дросселя 2, запитываемого от насоса 6, имеющего привод от двигателя транспортного средства. Регулируют перепад давления в гидроцилиндрах 14 и 15, пропорциональный сигналу управления. Обратная связь по усилию осуществляется с помощью встроенных в гидроцилиндры датчиков 34, выход которых подсоединен к блоку 33.
Гидросистема состоит из нагнетательной магистрали 4 высокого давления создаваемого насосом 6 (до 230 кгс/см2), и магистрали низкого давления 5, создаваемого насосом 8 (до 3 кгс/см2), системы управления и гидроцилиндров 14-17 и т.д. по числу подвесок.
Аккумуляторы 15 и 22 (на фиг.1 справа от оси вращения подпружиненного рычага 12) служат для сглаживания пиков давления в нагнетательной магистрали и повышения быстродействия системы управления.
Аккумуляторы 19 и 21 соединены с магистралью 5 и также служат для сглаживания пиков давления в ней.
Гидробак 10 является дополнительным и соединен со всасывающей магистралью гидронасоса 8 и выходами из клапанов 7 и 11 и насоса 8. Последний служит для обеспечения бескавитационного режима работы. При движении по неровностям происходят колебания машины. При наклоне вперед (клевок на нос) гидросистема в соответствии со сформированным в блоке 33 сигналом с помощью дросселей 2 (гидроусилителей) создает большее давление в гидроцилиндре 15, чем в гидроцилиндре 14. В результате этого на штоке цилиндра 15 возникает и передается на балансир дополнительная сила, а на штоке цилиндра 14 сила соответственно уменьшается. Создается момент Мг, который суммируется с моментом упругого элемента, и дополнительная реактивная сила Р на опору 13, которая препятствует перемещению корпуса 1. В то же время на задней крайней подвеске вычитается момент из момента, создаваемого упругим элементом. При этом создается сила, действующая на опору, способствующая гашению (уменьшению) колебаний корпуса 1 (см.фиг.3). Следовательно, сумма вертикальных сил, действующих на корпус машины, равна нулю, а восстанавливающий момент Мв, приложенный к корпусу, равен произведению расстояния между крайними опорами на величину дополнительной силы.
Этот момент принудительно гасит колебания корпуса и всегда противоположен знаку угловой скорости корпуса. Аналогичным образом создается восстанавливающий момент в поперечной плоскости. В случае сложного пространственного движения корпуса машины происходит векторное сложение дополнительных сил.
При вертикальных колебаниях направления сил на всех опорах одинаковы и противоположны скорости колебания. Важно отметить, что так как управление осуществляется по угловой скорости и вертикальным ускорениям, т.е. по динамическим составляющим колебаний корпуса, система не требует дополнительных устройств для обеспечения статических составляющих по дифференту, крену и дорожному просвету, возникающих при движении по косогору, ровной местности, при подъеме и спуске за счет наличия индивидуальных упругих элементов подвески.
Средние подвески в неуправляемом режиме при недостаточном давлении в магистрали 4 также способствуют гашению вертикальных колебаний. При этом энергию колебаний они не рассеивают в пространстве, как в других известных конструкциях, а рекуперируют, переводя в энергию давления для подпитки гидросистемы в момент большого расхода жидкости в управляемых крайних подвесках. Это происходит следующим образом.
При наезде на препятствие опора перемещает подпружиненный рычаг средней подвески вверх. Через шток 18 усилие передается на поршень цилиндра 17, в котором жидкость через обратный клапан 24 вытесняется в нагнетательную магистраль 4 и аккумулятор 22. Всасывающий клапан 26 при этом закрыт. Одновременно поршень цилиндра 16 перемещается вниз и жидкость поступает из магистрали 5 и аккумулятора 21 через всасывающий клапан 25 в цилиндр 16. Обратный ход подпружиненный рычаг совершает под действием упругого элемента подвески, например торсиона.
В цилиндр 17 жидкость поступает через всасывающий клапан 26 из магистрали 5 и аккумулятора 21. Одновременно поршень цилиндра 16 через обратный клапан 23 вытесняет жидкость в нагнетательную магистраль 4 и аккумулятор 22. Аккумуляторы 21 и 22, накапливая энергию низкого и высокого давления, используют ее для быстрой подачи для исключения разрыва потока при недостатке мощности насосов 6 и 8, а также для сглаживания пиков давления в магистралях. При этом аккумуляторы 19 и 21 работают на гидроцилиндры крайних и средних подвесок соответственно, а аккумуляторы 20 и 22 высокого давления отдают свою энергию гидроцилиндрам управляемых крайних опор, которые через управляемый дроссель 2 распределяют ее так, как было описано выше в работе управляемых крайних подвесок. Таким образом происходит рекуперация энергии, что позволяет снизить энергозатраты на передвижение и тем больше, чем труднее условия передвижения. Это позволяет снизить установочную мощность насоса 6, уменьшить кавитационные потери.
Изготовленный ходовой полноразмерный образец машины полностью подтвердил заявленные преимущества.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА СТАБИЛИЗАЦИИ КОРПУСА ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2501668C1 |
| СПОСОБ И СИСТЕМА ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548823C2 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2352475C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2352474C1 |
| Способ и система управления демпфирующими свойствами системы подрессоривания танка | 2024 |
|
RU2826323C1 |
| ГИДРОПРИВОД | 1992 |
|
RU2092718C1 |
| РУЛЕВОЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1993 |
|
RU2045435C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОДВИЖНОСТИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТАХ С ВЫСОКОЙ АДГЕЗИЕЙ И САМОХОДНОЕ ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2028242C1 |
| ТЯГОВО-ТОРМОЗНАЯ ЛЕБЕДКА ДЛЯ УСТАНОВКИ КОНТАКТНОГО ПРОВОДА ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2205786C1 |

Изобретение относится к транспортному машиностроению, в частности к многоопорным транспортным средствам с активной управляемой системой подрессоривания. Сущность: способ демпфирования колебаний многоопорного транспортного средства, заключается в рекуперации энергии колебаний корпуса. Конструкция, реализующая предлагаемый способ, содержит управляемую с помощью гидросистемы подвеску крайних колес и неуправляемую подвеску средних колес, снабженную системой рекуперации энергии, направляемой в подвеску крайних колес. 2 с.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Хачатуров А.А | |||
| Динамика системы дорога - шина - автомобиль - водитель, М.:Машиностроение, 1976, с.306 -307. | |||
